
Abstract
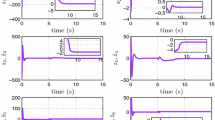
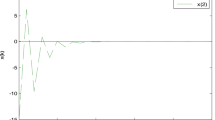
This study uses an output feedback disturbance observer-based proportional derivative (PD) controller with variable damping ratios for a class of single-input, single-output nonlinear systems in the presence of unknown disturbances. The proposed sliding mode state and disturbance observer, in which the switching term of the output estimation error is employed to counteract the effect of external disturbance, ensures that the estimation error is finally bounded in a neighborhood and reconstructs simultaneously the system state and unknown disturbance. Herein, the characteristics of the proposed observer are presented in the frequency domain, followed by the corresponding analysis in the time domain. A nonlinear PD controller with a variable damping ratio designed using the estimation state and disturbances should achieve low overshoot and short settling time. Finally, the simulation results demonstrate the validity of the proposed method.
Similar content being viewed by others

References
C. Edwards and S. K. Spurgeon, Sliding Mode Control Theory and Application, Taylor & Francis, London, 1998.
V. Utkin, J. Guldner, and J. Shi, Sliding Mode Control in Electro-Mechanical Systems, 2nd ed., Taylor & Francis, 2009.
S. Li, J. Yang, W. H. Chen, and X. Chen, Disturbance Observer-based Control: Methods and Applications, CRC Press, 2014.
Z. Gao, “Active disturbance rejection control: a paradigm shift in feedback control system design,” Proc. of American Control Conference, pp. 2399–2405, 2006.
J. L. Chang and T. C. Wu, “Disturbance observer based output feedback controller design for systems with mismatched disturbance,” International Journal of Control, Automation and Systems, vol. 16, pp. 1775–1782, 2018.
D. Yang, G. Zong, and H. R. Karimi, “H∞ defined antidisturbance control of switched LPV systems with application to aero-engine,” IEEE Transactions on Industrial Electronics, vol. 67, no. 4, pp. 3180–3190, 2020.
G. Zong, Y. Li, and H. Sun, “Composite anti-disturbance resilient control for Markovian jump nonlinear systems with general uncertain transition rate,” Science China Information Sciences, vol. 62, 22205, 2019.
H. Sun, Y. Li, G. Zong, and L. Hou, “Disturbance attenuation and rejection for stochastic Markovian jump system with partially known transition probabilities,” Automatica, vol. 89, pp. 349–357, 2018.
H. Sun, L. Hou, G. Zong, and X. Yu, “Fixed-time attitude tracking control for spacecraft with input quantization,” IEEE Transactions on Aerospace and Electronic Systems, vol. 55, no. 1, pp. 124–134, 2019.
G. Zong, W. Qi, and H. R. Karimi, “L1 control of positive semi-markov jump systems with state delay,” IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2020. DOI: https://doi.org/10.1109/TSMC.2020.2980034
C. S. Liu and H. Peng, “Inverse-dynamics based state and disturbance observers for linear time-invariant systems,” Transactions ASME J. Dynamic System Measurement Control, vol. 124, pp. 375–381, 2002.
M. Corless and J. Tu, “State and input estimation for a class of uncertain systems,” Automatica, vol. 34, pp. 757–764, 1998.
J. L. Chang, “Applying discrete-time proportional integral observer for state and disturbance estimation,” IEEE Trans-actions on Automatic Control, vol. 51, pp. 814–818, 2006.
M. Darouach, M. Zasadzinaski, and S. J. Xu, “Full-order observers for linear systems with unknown inputs,” IEEE Transactions on Automatic Control, vol. 39, pp. 606–609, 1994.
M. Hou and P. C. Muller, “Design of observers for linear systems with unknown inputs,” IEEE Transactions on Automatic Control, vol. 37, pp. 871–875, 1992.
S. B. Freidovich and H. K. Khalil, “Performance recovery of feedback linearization based designs,” IEEE Trans. on Automatic Control, vol. 53, no. 10, pp. 2324–2334, 2008.
H. K. Khalil, “Extended high-gain observers as disturbance estimators,” SICE Journal of Control, Measurement, and System Integration, vol. 10, no. 3, pp. 125–134, 2017.
J. Han, “From PID to active disturbance rejection control,” IEEE Transaction on Industrial Electronics, vol. 56, no. 3, pp. 900–906, 2009.
R. Madonski and P. Herman, “Survey on methods of increasing the efficiency of extended state disturbance observers,” ISA Transactions, vol. 56, pp. 18–27, 2015.
W. Wang and Z. Gao, “A comparsion study of advaned state observer design techniques,” Proceedings of the American Control Conference, Denver, pp. 4754–4759, 2003.
Q. Zheng and Z. Gao, “Active disturbance rejection control: Between the formulation in time and the understanding in frequency,” Control Theory and Technology, vol. 14, no. 3, pp. 250–259, 2016.
A. A. Godbole, J. P. Kolhe, and S. E. Talole, “Performance analysis of generalized extended state observer in tracking sinusoidal disturbance,” IEEE Trans. on Control Systems Technology, vol. 21, no. 6, pp. 2212–2223, 2013.
Y. Zhao, J. B. Yu, and J. Tian, “Robust output tracking control for a class of uncertain nonlinear systems using extended state observer,” International Journal of Control, Automation and Systems, vol. 15, no. 3, pp. 1227–1235, 2017.
X. Hua, D. Huang, and S. Guo, “Extended state observer based on ADRC of linear system with incipient fault,” International Journal of Control, Automation and Systems, vol. 17, no. 12, pp. 1425–1434, 2019.
X. K. Chen, S. Komada, and T. Fukuda, “Design of a nonlinear disturbance observer,” IEEE Transaction on Industrial Electronics, vol. 47, no. 2, pp. 429–437, 2000.
J. L. Chang, “Passivity-based sliding mode controller/observer for second-order nonlinear systems,” International Journal of Robust and Nonlinear Control, vol. 29, no. 6, pp. 1976–1989, 2019.
J. J. E. Slotine, J. K. Hedrick, and E. A. Misawa, “On sliding observers for nonlinear systems,” Trans. on ASME Journal Dynamic Systems Measurement Control, vol. 109, pp. 245–252, 1987.
J. T. Moura, H. Elmali, and N. Olgac, “Sliding mode control with sliding perturbation observer,” Trans. on ASME Journal Dynamic Systems Measurement Control, vol. 119, pp. 657–665, 1997.
L. Jiang and Q. H. Wu, “Nonlinear adaptive control via sliding-mode state perturbation observer,” IET Proceedings Control Theory Applications, vol. 149, no. 4, pp. 269–277, 2002.
B. Yang, T. Yu, H. Shu, J. Dong, and L. Jiang, “Robust sliding-mode control of wind energy conversion systems for optimal power extraction via nonlinear perturbation observers,” Applied Energy, vol. 210, pp. 711–723, 2018.
K. C. Veluvolu, Y. C. Soh, and W. Cao, “Robust observer with sliding mode estimation for nonlinear uncertain systems,” IET Control Theory Applications, vol. 1, no. 5, pp. 153–1540, 2007.
T. Ahmed-Ali and F. Lamnabhi-Lagarrigue, “Sliding observer-controller design for uncertain triangular nonlinear systems,” IEEE Trans. on Automatic Control, vol. 44, no. 6, pp. 1244–1249, 1999.
J. M. Daly and D. W. L. Wang, “Output feedback sliding mode control in the presence of unknown disturbances,” System & Control Letters, vol. 58, pp. 188–193, 2009.
Y. Xiong and M. Saif, “Sliding mode observer for nonlinear uncertain system,” IEEE Trans. on Automatic Control, vol. 46, no. 12, pp. 2012–2017, 2001.
Y. Sun, J. Yu, Z. Li, and Y. Liu, “Coupled disturbance reconstruction by sliding mode observer approach for nonlinear system,” International Journal of Control, Automation and Systems, vol. 15, no. 5, pp. 2292–2300, 2017.
W. Liu, S. Y. Chen and H. X. Huang, “Double closed-loop integral terminal sliding mode for a class of underactuateds systems based on sliding mode observer,” International Journal of Control, Automation and Systems, vol. 18, no. 11, pp. 339–350, 2020.
Author information
Authors and Affiliations
Corresponding author
Additional information
Recommended by Associate Editor Guangdeng Zong under the direction of Editor Hamid Reza Karimi.
This work was supported by the Ministry of Science and Technology Taiwan, R.O.C. under Grant no. MOST 109-2221-E-161-001.
Jeang-Lin Chang received his B.S. and M.S. degrees in control engineering, a Ph.D. degree in electrical and control engineering from National Chiao Tung University, Taiwan, R.O.C., in 1992, 1994, 1999, respectively. He was with the Mechanical Research Laboratory, Industrial Technology Research Institute, Taiwan, during 1997–1999. In 1999, he joined the Department of Electrical Engineering, Oriental Institute of Technology, as an Assistant Professor. He is currently a Professor. His research interests include sliding mode control, motion control, and signal processing.
Tsui-Chou Wu was born in Taiwan, R.O.C, in 1964. He graduated from the Department of Electronic Engineering in Chung Yuan Christian University in 1986. From 1990–1992, he studied at the Institute of Communication Engineering in National Chiao Tung University, and obtained his M.Sc. degree in 1992. He received a Ph.D. degree at the Institute of Biomedical Engineering in National Yang-Ming University. He is currently an Associate Professor. His research interests focus mainly on nonlinear dynamic system analysis and biomedical signal processing.
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Chang, JL., Wu, TC. Robust Output Feedback Sliding Mode State and Disturbance Observer-based Controller Design for Nonlinear Systems. Int. J. Control Autom. Syst. 19, 1550–1559 (2021). https://doi.org/10.1007/s12555-020-0243-x
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12555-020-0243-x