
Non-Linear Motion Characteristics of a Shallow Draft Cylindrical Barge Type Floater for a FOWT in Waves

 , ,
, , 
Abstract
:1. Introduction
2. Experimental Setup
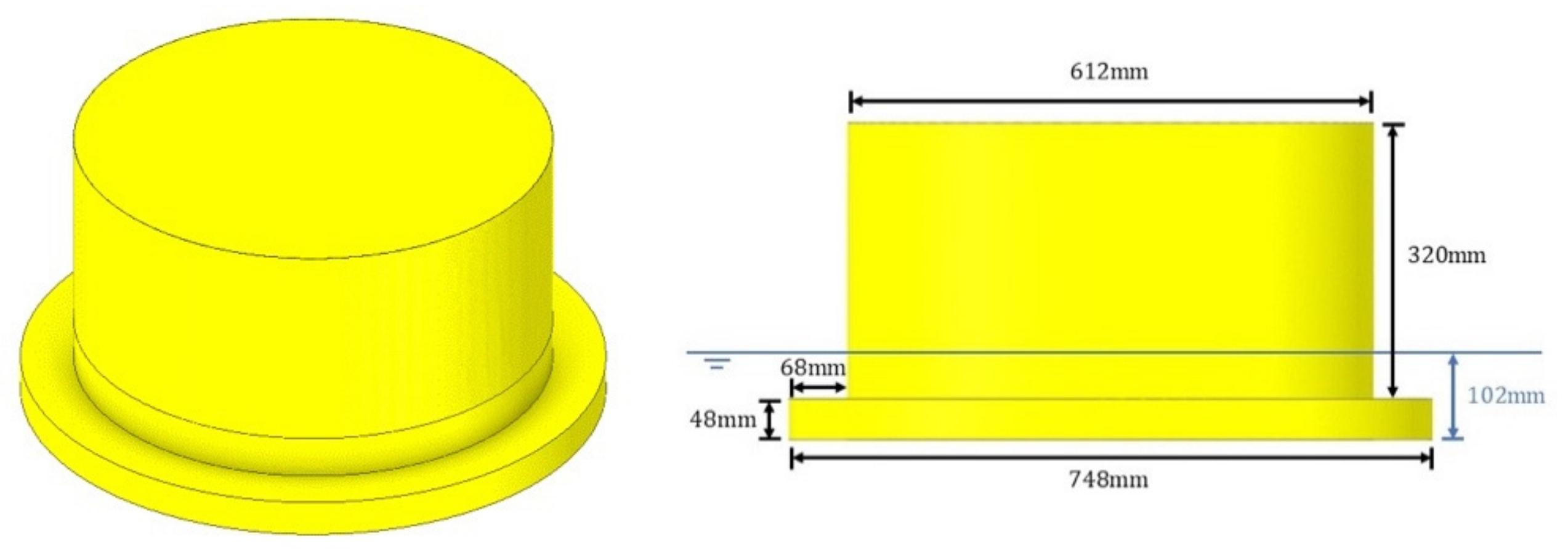
2.1. Reduced Scale Model
2.2. Wave Tank
2.3. Experimental Conditions
3. Numerical Methods
3.1. CFD Model
3.2. WAMIT Code Model
4. Results
4.1. Experimental and 3D CFD Free Decay Tests
4.2. Experimental and Numerical Motion Response in Waves
5. Conclusions
- For free decay tests, the model natural period agreed well between the experiment and CFD simulations. The quadratic model for obtaining the damping coefficients showed that the non-linear behavior of damping was mainly for pitch motions;
- For the regular wave tests, the RAO pitch was found to increase in the wave period range of 1.1 s to 1.6 s as the wave height was increased due to the viscous forces, such as vortex shedding and green water. Conversely, a significant decrease in peak height was observed for the resonance condition pitch. In the case of low wave height, the cancelation point (waveless period) and resonance peak were observed, close to the result of the linear potential calculation;
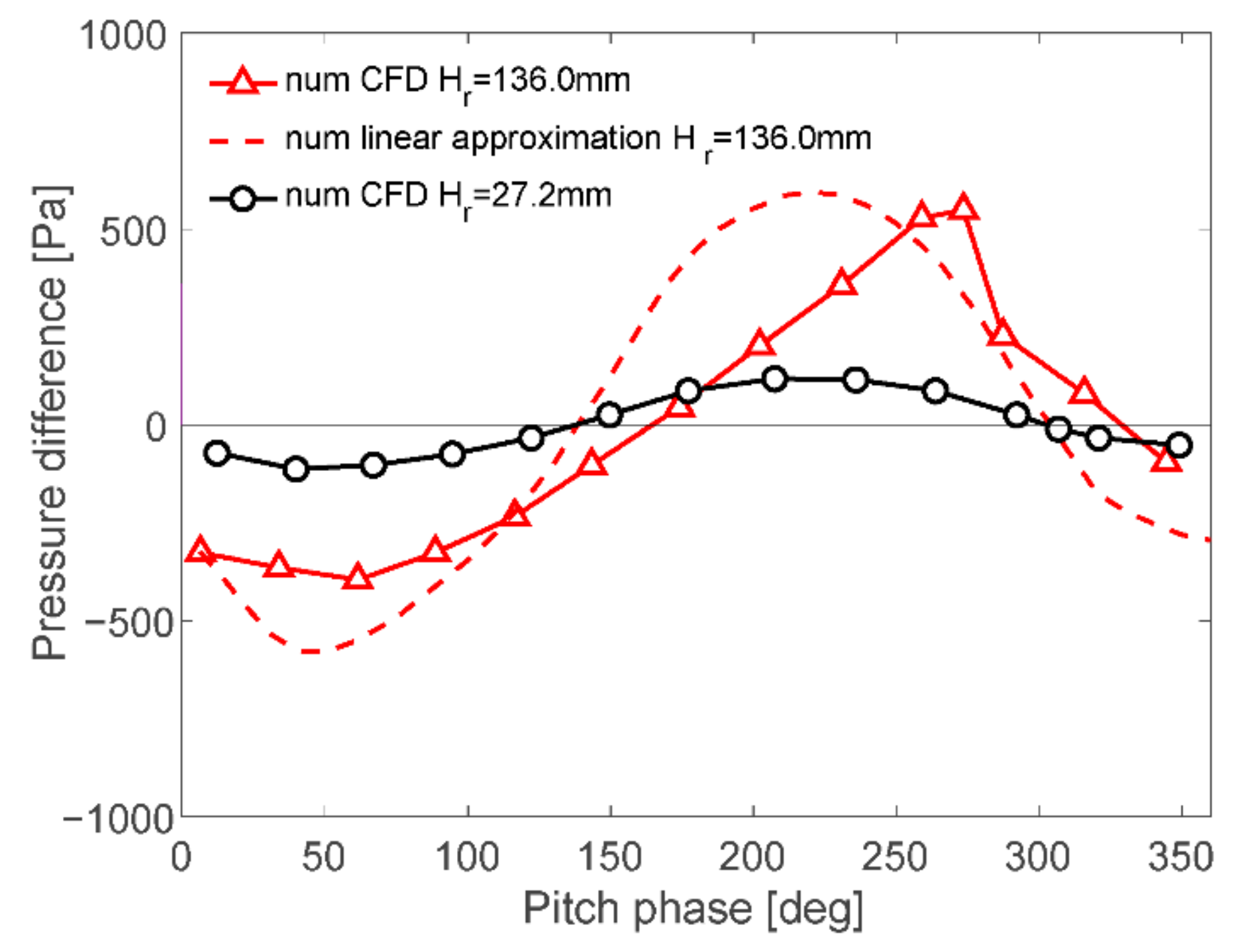
- For CFD simulations, calculating the pressure difference between the footing upper and lower surfaces on the wave encountered side-footing, the pressure on the footing was found to act in the direction of increasing the pitch motion. This was considered based on the effect that the water mass exerts on the upper surface of the wave side-footing when the coupling motion with heave makes the footing come up to the water surface;
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| metacentric radius | |
| center of gravity | |
| metacentric height | |
| regular wave height | |
| spring constant | |
| distance from the buoyance center to the keel point | |
| center of gravity measured from the keel | |
| Natural period of heave | |
| Natural period of pitch | |
| Linear damping of heave | |
| Linear damping of heave from free-decay tests | |
| Linear damping of pitch | |
| Linear damping of pitch from free-decay tests |
Appendix A
Appendix A.1. Linear Damping
Appendix A.2. Quadratic Damping
References
- Ministry of Economy, Trade and Industry. Strategic Energy Plan. Available online: https://www.meti.go.jp/english/press/2018/0703_002.html (accessed on 7 July 2018).
- Ministry of Justice, Japan. Act on Promoting the Utilization of Sea Areas for the Development of Marine Renewable Energy Power Generation Facilities. Available online: http://www.japaneselawtranslation.go.jp/law/detail/?id=3519&vm=04&re=02 (accessed on 5 May 2020).
- Ministry of Economy, Trade and Industry. Official Explanation of Technological Standards for Offshore Wind Power Facilities (Revised) Released. Available online: https://www.meti.go.jp/english/press/2020/0327_006.html (accessed on 18 March 2020).
- NEDO—New Energy and Industrial Technology Development Organization. NEDO Activity Report: Annual Report FY2018. Available online: https://www.nedo.go.jp/content/100898902.pdf (accessed on 5 May 2020).
- Fukushima Offshore Wind Consortium. Fukushima Floating Offshore Wind Farm Demonstration Project (Fukushima FORWARD)—Construction of Phase I. Available online: http://www.fukushima-forward.jp/english/pdf/pamphlet4.pdf (accessed on 18 March 2020).
- Fukushima Offshore Wind Consortium. Fukushima Floating Offshore Wind Farm Demonstration Project (Fukushima FORWARD)—Construction of Phase II. Available online: http://www.fukushima-forward.jp/english/pdf/pamphlet5.pdf (accessed on 18 March 2020).
- Ministry of Environment, Japan. 2010 Renewable Energy Introduction Potential Survey Report (in Japanese). Available online: http://www.env.go.jp/earth/report/h23-03/index.html (accessed on 18 March 2020).
- Glocal. Next Generation Floating Offshore Wind Power Generation System Demonstration Research (Barge Type). Available online: https://g-local.co.jp/works/barge/ (accessed on 18 March 2020).
- Raventos, A. Development of a second generation floating platform for offshore wind. In Proceedings of the Floating Offshore Wind Turbines Conferences, Montpellier, France, 24–26 April 2019. [Google Scholar]
- Stiesdal, H. The tetraspar demo design and status of an industrialized floating offshore wind turbine demonstration unit. In Proceedings of the Floating Offshore Wind Turbines Conferences, Montpellier, France, 24–26 April 2019. [Google Scholar]
- Lemmer, F.; Raach, S.; Schlipf, D.; Cheng, P.W. A new lightweight wave canceling semi-submersible design. In Proceedings of the Floating Offshore Wind Turbines Conferences, Montpellier, France, 24–26 April 2019. [Google Scholar]
- Guyot, M. How floating wind will enable 40€/MWh? In Proceedings of the Floating Offshore Wind Turbines Conferences, Montpellier, France, 24–26 April 2019. [Google Scholar]
- Suzuki, H.; Xiong, J.; Carmo, L.H.S.; Vieira, D.P.; Mello, P.C.; Malta, E.B.; Simos, A.N.; Hirabayashi, S.; Gonçalves, R.T. Elastic response of a light-weight floating support structure of FOWT with guywire supported tower. J. Mar. Sci. Technol. 2019, 24, 1015–1028. [Google Scholar] [CrossRef] [Green Version]
- Mello, P.C.; Malta, E.B.; Silva, R.O.P.; Candido, M.H.O.; Carmo, L.H.S.; Alberto, I.F.; Franzini, G.R.; Simos, A.N.; Suzuki, H.; Gonçalves, R.T. Influence of heave plates on the dynamics of a floating offshore wind turbine in waves. J. Mar. Sci. Technol. 2020. [Google Scholar] [CrossRef]
- Shiohara, H.; Gonçalves, R.T.; Houtani, H.; Suzuki, H.; Schnepf, A.; Hirabayashi, S.; Carmo, L.H.S.; Nihei, Y. Numerical and experimental comparison of the wave response of a very light floating offshore wind turbine with guy wires. In Proceedings of the ASME 2020 39th International Conference on Ocean, Offshore and Arctic Engineering, OMAE2020-19163, Fort Lauderdale, FL, USA, 21–30 June 2020. [Google Scholar]
- Yoshimoto, H.; Awashima, Y.; Kitakoji, Y.; Suzuki, H. Development of floating offshore substation and wind turbine for Fukushima FORWARD. In Proceedings of the International Symposium on Marine and Offshore Renewable Energy, Tokyo, Japan, 28–30 October 2013. [Google Scholar]
- Matsuoka, R.; Yoshimoto, H. Verification of precision concerning the design of advanced spar type structure. In Annual Spring Meeting of the Japan Society of Naval Architects and Ocean Engineers. 2015. Available online: https://www.jstage.jst.go.jp/article/conf/20/0/20_1/_article/-char/ja/ (accessed on 5 January 2021).
- Matsumoto, F.T.; Gonçalves, R.T.; Malta, E.B.; Medeiros, H.F.; Nishimoto, K.; Masetti, I. The influence at vertical first order motions using appendages in a monocolumn platform. In Proceedings of the ASME 2008 27th International Conference of Offshore Mechanics and Arctic engineering, OMAE2008-57440, Estoril, Portugal, 15–20 June 2008. [Google Scholar]
- Gonçalves, R.T.; Matsumoto, F.T.; Malta, E.B.; Rosetti, G.F.; Fujarra, A.L.C.; Nishimoto, K. Evolution of the MPSO (monocolumn production, storage and offloading system). Mar. Syst. Ocean Technol. 2010, 5, 45–53. [Google Scholar] [CrossRef]
- Hu, C.; Kashiwagi, M. Two-dimensional numerical simulation and experiment on strongly non-linear wave-body interactions. J. Mar. Sci. Technol. 2009, 14, 200–213. [Google Scholar] [CrossRef]
- Jacobsen, G.N. waves2Foam Manual. 2017. Available online: file:///C:/Users/MDPI/AppData/Local/Temp/manualWaves2Foam_v090.pdf (accessed on 5 January 2021).
- Revera-Arreba, I.; Bruinsma, N.; Bachynsky, E.E.; Viré, A.; Paulsen, B.T.; Jacobsen, N.G. Modeling of a semi-submersible floating wind platform in severe waves. In Proceedings of the ASME 2018 37th International Conference on Ocean, Offshore and Arctic Engineering, OMAE 2018-77680, Madrid, Spain, 17–22 June 2018. [Google Scholar]
- Bruinsma, N.; Paulsen, B.T.; Jacobsen, N.G. Validation and application of a fully non-linear numerical wave tank for simulating floating offshore wind turbines. Ocean Eng. 2018, 147, 647–658. [Google Scholar] [CrossRef]
- Ming, H.; Bing, R.; Da-hong, Q. Experimental study of non-linear behaviors of a free-floating body in waves. China Ocean Eng. 2016, 30, 421–430. [Google Scholar]
- Malta, E.B.; Gonçalves, R.T.; Matsumoto, F.T.; Pereira, F.R.; Fujarra, A.L.C.; Nishimoto, K. Damping coefficient analyses for floating offshore structures. In Proceedings of the ASME 2010 29th International Conference of Offshore Mechanics and Arctic engineering, OMAE2010-20093, Shanghai, China, 6–11 June 2010. [Google Scholar]
- Chakrabarti, S.K. Offshore structure modeling. Adv. Ser. Ocean Eng. 1994, 9, 445–451. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Characteristic | Value |
|---|---|
| Displacement [kg] | 36.93 |
| [mm] | 81 |
| [mm] | 187 |
| [mm] | 46 |
| [mm] | 152 |
| Pitch Radius of Gyration [mm] | 215 |
| Degree of Freedom | Natural Period [s] |
|---|---|
| surge | 13.30 |
| heave | 1.34 |
| pitch | 1.68 |
| Parameter | Value |
|---|---|
| Wave height [mm] | 27.2 |
| 68.0 | |
| 136.0 | |
| Wave period [s] | from 0.7 to 2.0 |
| Property | CFD | Experiment |
|---|---|---|
| Natural period of heave, [s] | 1.39 | 1.34 |
| Linear damping of heave, | 7.6% | 12.5% |
| Primary quadratic damping of heave | 12.8% | 18.8% |
| Secondary quadratic damping of heave | 0.1% | 0.2% |
| Natural period of pitch, [s] | 1.73 | 1.68 |
| Linear damping of pitch, | 4.9% | 3.1% |
| Primary quadratic damping of pitch | 2.3% | 1.0% |
| Secondary quadratic damping of pitch | 4.5% | 7.7% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Suzuki, H.; Sakai, Y.; Yoshimura, Y.; Houtani, H.; Carmo, L.H.S.; Yoshimoto, H.; Kamizawa, K.; Gonçalves, R.T. Non-Linear Motion Characteristics of a Shallow Draft Cylindrical Barge Type Floater for a FOWT in Waves. J. Mar. Sci. Eng. 2021, 9, 56. https://doi.org/10.3390/jmse9010056
Suzuki H, Sakai Y, Yoshimura Y, Houtani H, Carmo LHS, Yoshimoto H, Kamizawa K, Gonçalves RT. Non-Linear Motion Characteristics of a Shallow Draft Cylindrical Barge Type Floater for a FOWT in Waves. Journal of Marine Science and Engineering. 2021; 9(1):56. https://doi.org/10.3390/jmse9010056
Chicago/Turabian StyleSuzuki, Hideyuki, Yuta Sakai, Yasuo Yoshimura, Hidetaka Houtani, Lucas H. S. Carmo, Haruki Yoshimoto, Ken Kamizawa, and Rodolfo T. Gonçalves. 2021. "Non-Linear Motion Characteristics of a Shallow Draft Cylindrical Barge Type Floater for a FOWT in Waves" Journal of Marine Science and Engineering 9, no. 1: 56. https://doi.org/10.3390/jmse9010056