
Abstract
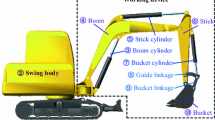
In order to improve the working performance of the mining excavators, a new type of hydraulic excavator working device is proposed. The proposed excavator working device possesses main advantages of the Tri-Power structure, whereas the kinematic and dynamic analysis can be greatly simplified. In this paper, the kinematic model and tool force model of the new working device are established, and the working performance simulation is conducted. Simulation results show that the new device has excellent performance of level crowding, translational lifting and tool force, indicating that the proposed working device is feasible. After that, multi-objective optimization is designed based on intelligent optimization algorithm. Compared with performance before optimization, all the concerned objectives are improved, including the tool force, level crowding and translational lifting performance. The optimization result has the important reference for the design and application of the new type face-shovel excavator.







Similar content being viewed by others
References
Cao, S.: Single Bucket Excavator. China Machine Press, Beijing (1988)
Cao, Y.: Structural Synthesis and Design of New Face-Shovel Excavator Mechanism. Master's Thesis, Yanshan University (2014)
Chen, Y.: Structural Synthesis and Automatic Kinematics Analysis of Face-Shovel Digging Device. Master's Thesis, Yanshan University (2013)
Chen, J.: Research on key Technology of Working Equipment of Single Bucket Hydraulic Excavator. Science Press, Beijing (2014)
Chen, J., Li, Q., Zhang, S., Hou, Y.: Atlas overlay analysis on digging performance for hydraulic face-shovels. Chin. J. Constr Mach 9(1), 32–37 (2011)
Corne, D., Jerram, N., Knowles, J. Oates, M.: PESA-II: Region-based selection in evolutionary multi objective optimization. In: Proceedings of the 3rd Annual Conference on Genetic and Evolutionary Computation, San Francisco, USA, 283–290 (2001)
Deb, K., Pratap, A., Agarwal, S.: A fast and elitist multi-objective genetic algorithms: NSGA-2. IEEE Trans. Evol. Comput. 8(2), 182–197 (2002)
Ge, L., Dong, Z., Li, Y., Quan, L., Zhang, X., Zhao, B.: Research on digital prototypes of serial hydraulic excavators. J. Mech. Eng. 55(14), 186–196 (2019)
Huang, P.: Research on the Structure Synthesis Theory and Technology of the Planer Multi-Loop Coupled Mechanisms. Doctor's Thesis, Yanshan University (2016)
ISO6015:2006.: Earth-moving machinery—hydraulic excavators and backhoe loaders—methods of determining tool forces. Journal (2006).
Li, H., Li, D., Li, Y.: A multi-index assessment method for evaluating coverage effectiveness of remote sensing satellite. Chin. J. Aeronaut. 31(10), 2023–2033 (2018)
Mitrev, R., Pobegailo, R.G.: CAD/CAE Investigation of a large hydraulic mining excavator. Mach. Des. 3(1), 17–22 (2011)
Pan, Y.: Study on the Design Theories and Methodologies of a Multi-Dof Controllable Mechanism Type Novel Engineering Machinery. Doctor's Thesis, Guangxi University (2013)
Sheng, W., Liu, K., Meng, X., Li, Y.: Optimal placement and sizing of distributed generation via an improved nondominated sorting genetic algorithm II. IEEE Trans. Power Deliv. 30(2), 569–578 (2015)
Shi, Q.: Hydraulic Excavator. China Machine Press, Beijing (2018)
Tang, J.: Design and Transient Dynamic Research of a Novel Excavating Mechanism With Metamorphic Functions. Master's Thesis, Guangxi University (2017)
Wang, J.: The Innovative Design of the New Three Degrees of Freedom Controllable Mechanism. Master's Thesis, Guangxi University (2013)
Wang, L.: New Type 3-Dof Controlled Institution Type Synthesis and Analysis of Excavator. Master's Thesis, Guangxi University (2015)
Xia, Y., Qi, Q.: A technique of order preference by similarity to ideal solution for hybrid multiple attribute decision making problems. J. Syst. Eng. 19(6), 630–634 (2004)
Xu, G., Ding, H., Sun, Y.: Optimization of face-shovel excavator’s attachment based on improved NSGA-II. J. Mech. Eng. 52(21), 35–43 (2016)
Zhang, Q., Li, H.: MOEA/D: a multi objective evolutionary algorithm based on decomposition. IEEE Trans. Evol. Comput. 11(6), 712–731 (2007)
Zhu, D., Cao, Y.: Kinematics analysis of triangle structure face-shovel. Coal Mine Mach. 36(11), 126–127 (2015)
Zu, Q., Zhao, Y., Liu, Z., Tu, H., Zhai, D.: Kinematics analysis of a new face-shovel hydraulic excavator in mining. Mach. Tool Hydraul. 48(2), 114–118 (2020)
Acknowledgements
This work is supported by National Natural Science Foundation of China under the Grants no. U1910211 and no. 51475019.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix
Appendix
Meaning of partial variables
\(x_{0} ,y_{0}\): | Coordinates of point P in coordinate system \(\{ xOy\}\) | \(x_{1} ,y_{1}\): | Coordinates of point P in coordinate system \(\{ x_{1} Oy_{1} \}\) |
\(x_{2} ,y_{2}\): | Coordinates of point P in coordinate system \(\{ x_{2} O_{2} y_{2} \}\) | \(x_{3} ,y_{3}\): | Coordinate of point P in coordinate system \(\{ x_{3} O_{3} y_{3} \}\) |
\(d_{1} ,d_{2}\): | Lengths of the boom and arm | \(\delta\): | The bucket attitude angle |
\(\Phi_{1}\): | The angle between the tangent line of bucket teeth and \(x_{3}\) axis | \(F_{{{\text{A}}\tau 1}}\): | The tool force provided by arm cylinders |
\(F_{{{\text{A}}\tau 2}}\): | The tool force limited by locking ability of bucket cylinder | \(F_{{{\text{A}}\tau 3}}\): | The tool force limited by locking ability of boom cylinder |
\(F_{{{\text{A}}\tau 4}}\): | The tool force limited by machine slippage | \(F_{{{\text{A}}\tau 5}}\): | The tool forces limited by tipping forward |
\(F_{{{\text{A}}\tau 6}}\): | The tool forces limited by tipping backward | \(x_{D}\): | The horizontal axis value of point D, others are the same |
\(l_{{O_{2} P}}\): | The distance between \(O_{2}\) and P, others are the same | \(e_{22}\): | Arm of arm cylinder force toward \(O_{2}\) |
\(e_{32}\): | Arm of bucket cylinder force toward \(O_{2}\) | \(G_{22}\): | The weight of arm cylinders |
\(G_{33}\): | The weight of bucket cylinders | \(F_{{{\text{A}}\tau }}\): | The theoretical arm cylinder tool force |
\(\overline{\delta }\): | The average value of \(\delta\) | \(F_{{{\text{B}}\tau }}\): | The theoretical bucket cylinder tool force |
\(R_{\max }\): | The maximum digging radius | \(H_{\max }\): | The maximum digging height |
\(\eta_{1} ,\eta_{2}\): | Ratios of the arm cylinder or bucket cylinder giving full play | \(C^{^{\prime}}\): | The vertical foot of C on the axis of the arm |
\(D_{\max }\): | The maximum digging depth | S: | The maximum crowding length on the level ground |
\(c_{3}\): | Design requirement of digging height | \(c_{4}\): | Design requirement of digging radius |
\(c_{5}\): | Design requirement of digging depth | \(c_{6}\): | Design requirement of crowding length |
\(c_{7}\): | Design requirement of arm tool force | \(c_{8}\): | Design requirement of bucket tool force |
Rights and permissions
About this article

Cite this article
Li, Y., Mu, X. & Fan, R. Multi-objective optimization and simulation of novel working mechanism for face-shovel excavator. Int J Intell Robot Appl 5, 1–9 (2021). https://doi.org/10.1007/s41315-020-00160-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s41315-020-00160-1