Independent Map Enhancement for a Spatial Road Network: Fundamental Applications and Opportunities


College of Computing and Informatics, Saudi Electronic University, Riyadh 13316, Saudi Arabia
ISPRS Int. J. Geo-Inf. 2021, 10(1), 8; https://doi.org/10.3390/ijgi10010008
Submission received: 1 November 2020
/
Revised: 9 December 2020
/
Accepted: 21 December 2020
/
Published: 27 December 2020
(This article belongs to the Special Issue Geo-Information Science in Planning and Development of Smart Cities)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:In many developing cities, the improvement of transport infrastructure is usually accompanied by major road construction and maintenance. This paper presents approaches and opportunities using peer-to-peer updating to improve spatial road networks undergoing construction and maintenance, which in turn will improve traffic flow and benefit cities overall. In many cities, the spatial road network requires maintenance, and these works often require traffic detours. With the current GPS (Global Positioning System) services, there is a noticeable delay in the updating of many spatial road networks. Thus, when a driver plans a trip to a certain location (such as Starbucks), his/her usual route may have changed, but the spatial road network in the GPS has not been updated. This can affect the user in many ways. For example, a trip that usually takes five minutes might now take half an hour, taking into account the additional time required to find alternative roads and possibly encountering more unexpected road closures, until the driver reaches his/her destination. This paper addresses this issue by proposing solutions that offer several advantages including a new peer-to-peer updating mechanism that helps to direct the driver to another route when road changes occur. Moreover, the peer-to-peer updating mechanism can enable the independent monitoring of road conditions and the updating of maps for newly-constructed roads, as well as the analysis of road congestions, traffic density, and people movements at certain times. Note that this work focuses on the conceptual ideas and approaches intended to improve independent maps, and the detailed algorithms have been left for future work.
1. Introduction
Mobile GPS is becoming widely available and is connected to publicly accessible maps (e.g., Here Maps and Google Maps) [1,2]. Moreover, the direction and route planning feature that shows the route from the start point to the destination point is now one of the most popular navigation applications [3,4]. These systems allow one to search for a certain object of interest such as a supermarket or gas station. Figure 1 shows an example of spatial objects (gas stations) in Google Maps.
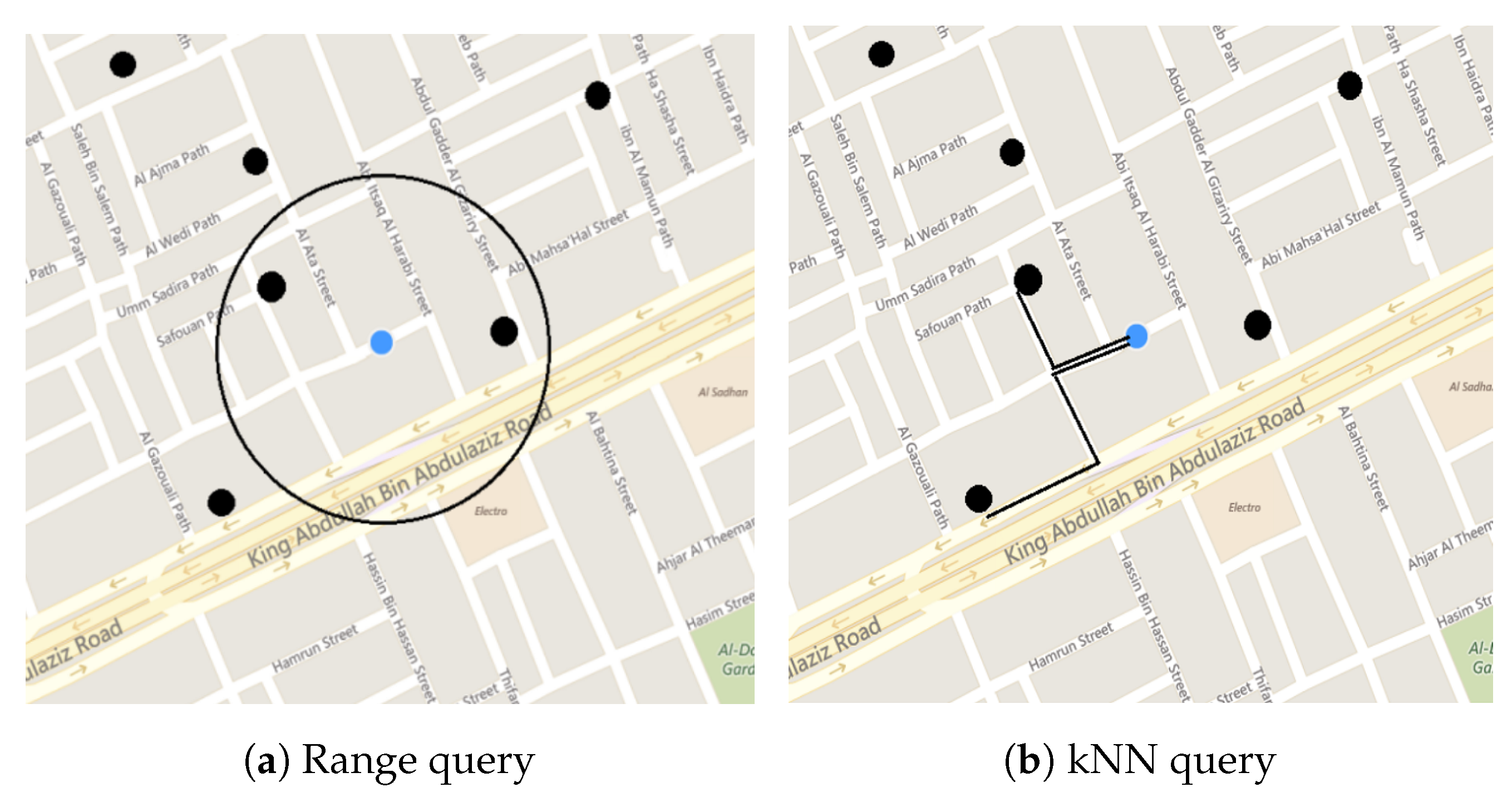
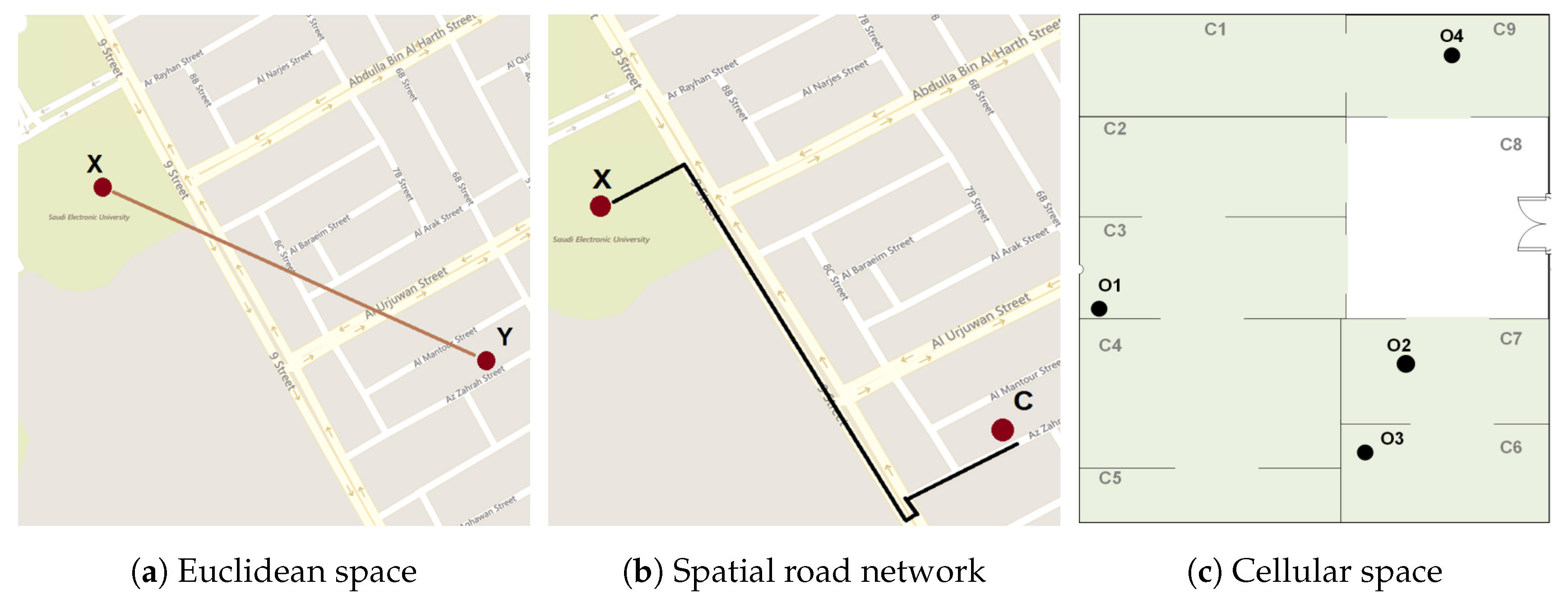
With the development of new spatial databases, a large number of spatial queries, which are significantly important in many industrial areas, have been proposed and studied comprehensively over the last few years [5,6]. These queries have a variety of purposes and concepts. Examples include join, K Nearest Neighbor (kNN), point, range, spatiotemporal range, Reverse Nearest Neighbor (RNN), and within-distance queries [7,8]. Examples are shown in Figure 2. These queries can be performed in different space structures. The most common structures of spatial data are: Euclidean space, spatial road network, and cellular space [2]. In Euclidean space, the distance between objects and is the direct (straight line) distance between them. In Euclidean space, all the queries use Euclidean space measurement. For example, a range query performed in Euclidean space could retrieve spatial objects within a 5 km radius. In this example, Euclidean space measurement is used to determine the distance from the query point to the points of interest for a radius of up to 5 km. Figure 3a shows a Euclidean space measurement query where X wants to retrieve the Euclidean distance between its location and the object Y. Cellular space is a representation of locations by sets of cells that include spatial objects (see Figure 3c). The main difference between cellular space and Euclidean space or spatial road networks is the geometric representation of the spatial property [9,10].
The spatial road network is the other space structure that can be considered for spatial objects that are either static or moving [11]. In a spatial road network, the distance between and is the network distance (or shortest road) between them where and are the moving objects located on a road. In this space, the queries will be considered from the perspective of the road network measurement [1,11]. For example, a 3NN query is performed on a spatial road network to retrieve the two spatial objects nearest to . In this example, the shortest distance measurement is used to return the results. Figure 3b shows a spatial road network, where X wants to retrieve the shortest path between its position and the moving object C. This space structure is the main focus of this research.
This paper discusses the advantages and opportunities of a peer-to-peer updating mechanism for a spatial road network. In many cities, the spatial road network has not undergone regular maintenance; hence, drivers may be forced to take different routes because of current maintenance works. Thus, when a driver plans a trip to a certain location, his/her usual route may be disrupted, requiring him/her to take a detour, since the spatial road network on the GPS has not been updated. This will require the user to look for other roads that will lead to his/her destination. However, this might mean that a trip that usually takes a few minutes might now take half an hour. For instance, in Riyadh, Saudi Arabia, these issues arise frequently due to the construction of railway lines. For example, when a user wants to reach a certain location, he/she may be surprised to find that the usual road he/she takes is closed and he/she must take another road in order to reach his/her destination. Therefore, this work examines the advantages of having a peer-to-peer updating mechanism that can help a driver to take the best route when faced with altered road conditions. A system that can independently monitor the road conditions, update maps for newly-constructed roads, and analyze road congestions, traffic density, and people movements during a certain time will help to ensure a better traffic network and improve road traffic management. Moreover, the system can be enhanced with applications that can monitor driver behavior and reactions when using a specific section of road in a particular area.
Note that this paper focuses on the conceptual ideas and the opportunities of using a peer-to-peer updating mechanism with IoT technologies that enable the independent monitoring of spatial roads. The detailed algorithms and results will be included in future works.
2. Literature Review
2.1. Traffic Monitoring
With the development of urbanization, the level of construction in cities has been enhanced. Simultaneously, developing cities’ traffic congestion and traffic noise affect the quality of life of urban residents in a negative way. Thus, it is essential from both the social and economic perspectives to take the corresponding procedures to improve traffic congestion and guarantee smooth urban traffic [12].
Many researchers have focused on understanding traffic jam monitoring and traffic congestion [12,13]. In [13], an intelligent urban traffic monitoring system was proposed, which was responsible for tracking the condition of traffic congestion and taking active measures to deal with this condition. The system focused on Spark technology, supporting distributed computing. Another research work focused on estimating the local congestion state, by using real values to denote the congestion level and continuous updating over time [14]. It is clear that traffic congestion research has focused on the issues of traffic congestion and its monitoring for drivers, without focusing on the impact of the road updating and road maintenance, which is the main aim in this research. Next, a variety of approaches for routing in a spatial road network will be explained.
2.2. Routing in a Spatial Road Network
The spatial road network concept has been the focus of many previous studies [6,15,16,17,18]. This section reviews the works that have used the notion of a spatial road network to determine the shortest path between two given locations. This is essential to illustrate the importance of spatial road network updating in routing.
The Dijkstra algorithm was the earliest algorithm used to obtain the shortest path between two points or nodes. This algorithm was proposed by Edsger Dijkstra in 1959 [19]. The basic idea behind this algorithm is to search a graph to find the shortest path between any nodes on the graph, taking into consideration the given weight of each edge. In this algorithm, when the starting node is determined, the algorithm can find the shortest path between the node and every other node in the graph. This algorithm is commonly used in routing and in spatial query processing [19]. To calculate the shortest network distance in spatial query processing, the Dijkstra algorithm is slightly modified to accommodate changes in the processing of spatial queries [20]. In a spatial road network, the basic aspect is the network distance between two spatial objects, where the network distance is the shortest between two points. Thus, the focus here is on identifying the shortest network distance between two given spatial objects [20,21,22].
Because the Dijkstra algorithm can be used to determine the shortest distance between two given nodes, this algorithm is useful for spatial query processing [2,23]. However, here, the object of interest is located within the lines (or road) and not on the node, as in the Dijkstra algorithm. This is the main difference. Hence, the Dijkstra algorithm has been modified to address this situation. Furthermore, since our focus here is only on the shortest distance between two objects on the road (path), the modified Dijkstra algorithm will be the input for the locations of two spatial objects [20]. This is known as the shortest network distance. An example of the shortest network distance is shown in Figure 4a. Suppose there are two spatial objects, and , where is located on the road between nodes and , whereas is located between and . The shortest network distance process, in this instance, will find the shortest distance between and .
On the other hand, the Incremental k Nearest Neighbor (IkNN) approach gives a set of candidate spatial objects in order to obtain the shortest path [24]. The IkNN method starts at the query point and goes through k objects of interest, such as finding the shortest path to two gas stations from . In this case, it is an ordinary kNN since the result is the shortest path to the spatial objects of interest, one after the other. Note that IkNN uses network expansion as an Incremental Network Expansion (INE) [24,25]. In IkNN, the basic idea of the network expansion method is to record all expansion branches until a road is found that is full of the targeted spatial objects. Here, the road is set as the boundary. The expansion continues if there is a road shorter than the boundary; the path can be shrunkuntil all potential branches are expanded beyond the boundary. Note that IkNN focuses only on a single type of spatial point of interest (objects) (see Figure 4b).
In addition, a Route Search over Fixed Locations (known as RFix) can find the most efficient route to fixed locations predetermined by the user [26,27]. Here, the focus is on searching a route over a number of various locations. In this case, the searching is based on locations predetermined by the user, such as the SABB Bank on the Northern Ring Branch Rd and the pharmacy on King Fahd Rd, Al Malqa, Riyadh 13521. Note that in this case, a specific bank (SABB) is named rather than a bank in general. Similarly, the pharmacy is sought, not just any pharmacy. Moreover, the exact location is given: Northern Ring Branch Rd, at Taawun, Riyadh 12477.
2.3. Trajectories in the Updating Road Network
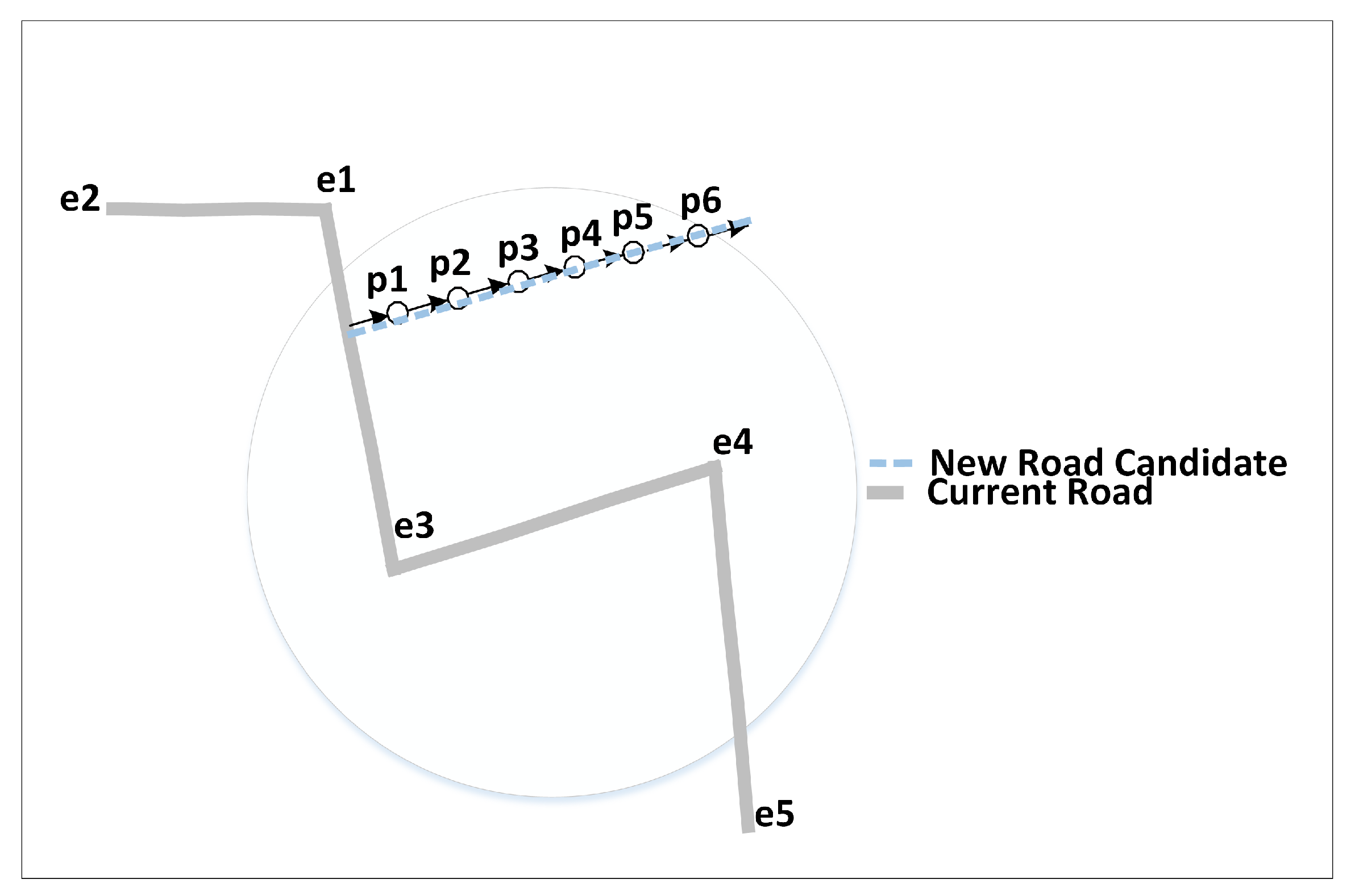
In addition, Reference [28] proposed an automatic approach to detect and update any new roads added to the current road network. However, their focus was only on the low-quality GPS trajectory data, which were compared with remote sensing images and high-quality GPS data collected by professional survey vehicles. GPS trajectory data collected by public vehicles are relatively inexpensive and can be acquired in real-time with comprehensive coverage. Basically, in order to find additional new roads in the road network, they used vehicle trajectories that do not match the original road network [29]. Therefore, based on the point-to-segment matching, any unmatched sampling points will be the new roads that have been added to the original road network. Figure 5 shows how new roads are indicated, which are , , , , , and .
On the other hand, Reference [30] focused on the quality of both maps and trajectories by introducing an iteration-based map-trajectory co-optimization algorithm. Basically, in order to achieve the co-optimization process intended to enhance simultaneously the quality of map updating and map matching, they introduced quality measures to quantify the map matching quality and the map quality. Here, the main goal is to maximize the quality score. Furthermore, they established a confidence score and an influence score in order to measure the accuracy of each new road indicated by any map update. Note that the confidence score assesses the confidence in inferring any new road, and the influence score assesses its contribution to the improvement of map matching results. In [30], a map matching algorithm and the concept of matching certainty were used to better evaluate the road influence. Figure 6 gives an example of unmatched trajectories found using this approach.
Furthermore, common map services such as Google Maps, HERE, and others usually use several diverse sources of data to create initial maps and then base the updates on vehicles (annotators and volunteers) to detect and update the current road imperfections [31,32]. However, this process usually results in a very slow response in correcting the maps when any change in the road network occurs. In many countries around the world, especially the developing nations, major cities are always under construction, which tends to produce significant latency and misleading data in regard to these cities. Some works use OpenStreetMap in order to obtain updates on road-related problems [31,33]. For example, Map Fusion [31] is an application that automatically merges two maps. One of the maps is a slowly-updated map such as OpenStreetMap (OSM), whereas the other map is an automatically inferred map with incomplete coverage and an imperfect topological structure.
3. Gap Analysis
As mentioned, most of the studies conducted on spatial road network query processing assumed that the spatial road network has been updated correctly and promptly. Moreover, most works attempted to improve various aspects of spatial road networks in order to assist road users to reach their destinations. Others focused on updating the maintenance works being carried out on road networks by applying the user trajectories. However, a major issue arises especially when the server is not updated promptly. Furthermore, for reasons such as maintenance works, a spatial road network may require the driver to take one or more detours. Thus, this study presents a peer-to-peer updating mechanisms and ideas to update outdoor road networks by incorporating IoT technologies such as road quality monitoring and automatic emergency beacons.
What might be the consequences of incorrect routing in the road network? Below, we examine these issues, which are common occurrences in Riyadh, Saudi Arabia.
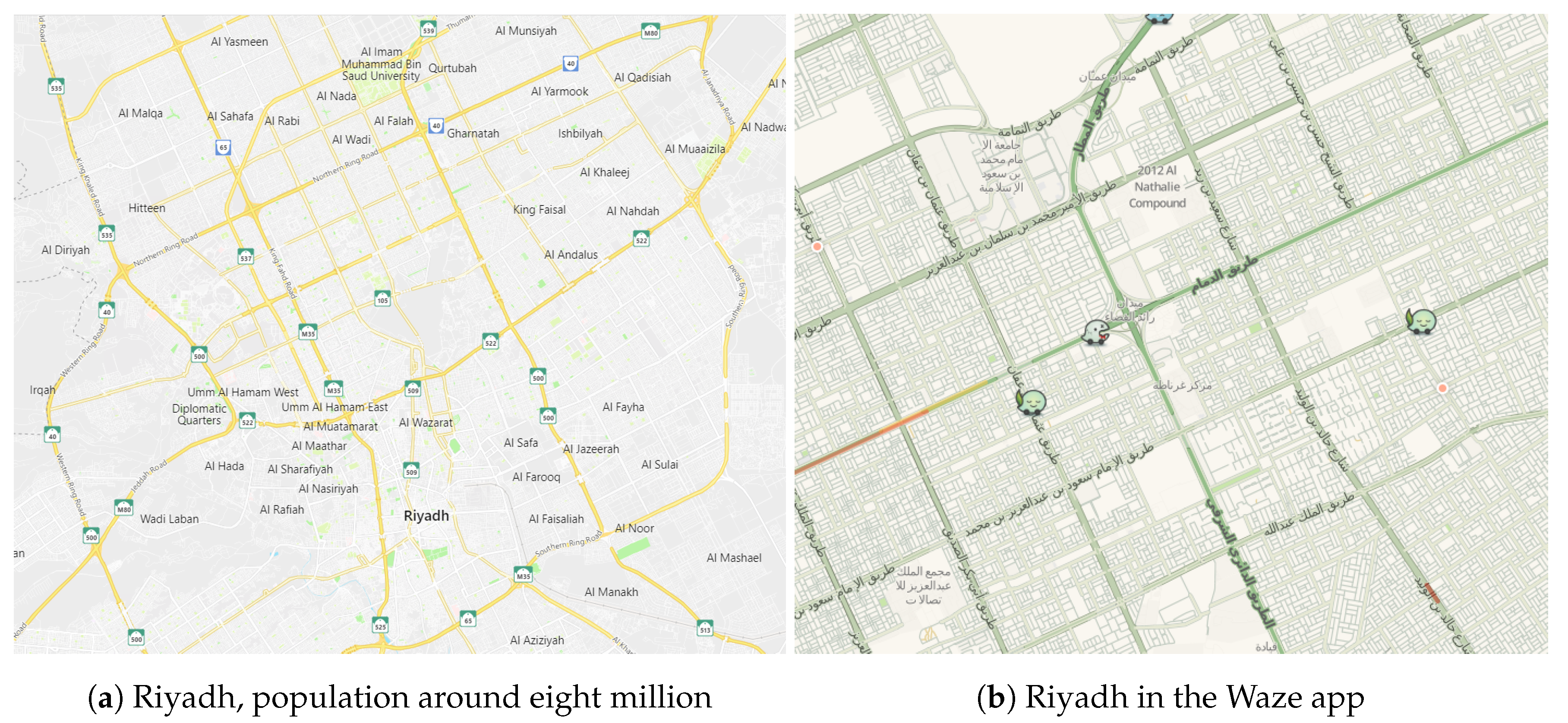
In Riyadh, the capital city of Saudi Arabia (see Figure 7a), the metro constructions began officially in April 2014 and were intended to cover all major areas of the capital to provide a variety of transportation modes to the residents. Since the start of the project, many roads and areas have become either temporarily or permanently unavailable. The construction works have affected roads and forced road closures for a certain amount of time, ranging from an hour or less to a couple of days. The main issue is the incorrect or slow updating of the spatial road networks in many areas of the city, which means that trips to certain places might take longer and be more difficult.
These issues cannot be resolved using common GPS services such as Google Maps or even Waze maps [34]. In Google Maps, the Maps Traffic feature basically works by analyzing the GPS-determined positions transmitted to map servers by a large number of smart phone users. By calculating the driver’s speed and the road length, Google Maps is able to produce a live traffic map. Moreover, recently, Google Maps allowed any users to report or give feedback in regard to accidents, or speed cameras, or road constructions. Google provides updates to the server [34,35] by processing the incoming raw data indicating the locations of mobile phone devices and then excludes anomalies such as a postal vehicle that makes frequent stops. When a threshold of users in a particular area is noted, the overlay along roads and highways on the Google map changes color.
Waze differs from traditional GPS navigation software in that it is community-driven, gathering complementary map data and traffic information from its users [31,35] and other GPS software; it obtains information from users’ driving times to provide routing and real-time traffic updates. It is free to download and use. People can report accidents, traffic jams, and speed and police traps and can use the online map editor to update roads, landmarks, house numbers, etc. Waze also identifies the least expensive fuel station closest to drivers or along their route, provided that Waze has enabled fuel prices for that country. The Waze application for Riyadh is shown in Figure 7b.
However, most often, the indicated issues by current map services are related to traffic jams [30]. This is a common reason for complaints and several other issues that could end up causing traffic jams. Here, an important question that arises is: What can cause a traffic jam? In Waze or Google Maps, if the user reports road construction or an accident, the update still relies on the mobile phone devices. Moreover, the road network update cannot occur through these systems immediately, which usually takes days to be updated by the server. However, a new segment can open temporarily because of construction in developing cities [30]. In the same way, the identification of problematic roads without being able to update and identify a section of road or a new road detour does not solve the traffic jams [35]. Using the IoT ( Internet of Things) technologies through a P2P (Peer to Peer) system and OBD2 (On-Board Diagnostics) can solve the origin of the traffic issues and improve the smoothness of the spatial road networks.
However, the main problem is that in Riyadh, neither system is effective mainly because the construction works and changing road conditions are often unexpected (and for a very short time), and therefore, the routes shown by these apps are often inaccurate. Although Waze uses drivers’ feedback, the routing changes cannot be applied. Drivers might indicate that a certain road is very busy, but this condition might not last long. Therefore, a more advanced updating method is required to address the issue of unexpected route changes. Next, several problem scenarios are considered.
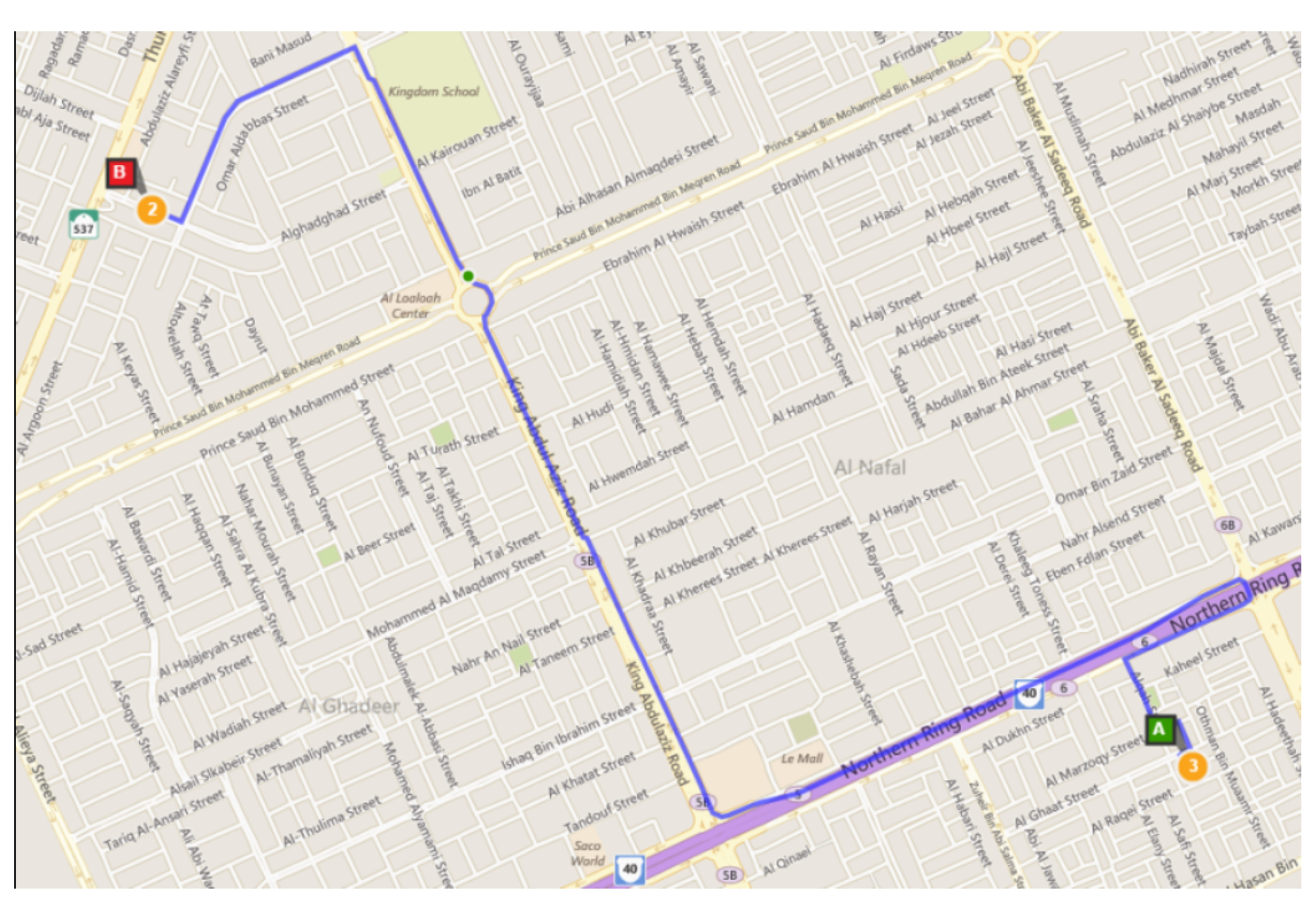
If user A wants to go from his/her current location to location B (coffee shop), the usual routing on the map is as shown in Figure 8, where the user will take the Northern Ring Road toward King Abdulaziz Road and from there turn left to his/her destination. The distance is approximately 7 km, and this trip usually takes A around 11 min. However, because of construction work, King Abdulaziz Road will be closed for a few hours, and this update has not been sent to the server. Therefore, the driver who usually takes this road will be forced to make a U-turn and find an alternative road to B.
This issue is common in the city where drivers are forced to change their direction and find another road to their destination. Note that in GPS services, the original route shown in Figure 8 still applies and does not change since these applications do not use driver feedback to update road information. In the previous scenario, A has to change his/her usual route and adopt either Plan 1 or Plan 2 (as an example). In Plan 1, A has to make a U-turn and go east from the Northern Ring Road toward Abu Baker Alsedeaq Road, then go from Price Saud Bin Mohammed Road to the destination. However, in this case, the distance is 15 km, and the trip takes around 30 min (see Figure 9a). In Plan 2, the user A has to make a U-turn and go east from the Northern Ring Road toward King Fahad Road, then change the direction to the north of King Fahad Road, then take Prince Saud Bin Mohammed Road to the destination. However, in this case, the distance is around 18 km, and the trip would take around 27 min (see Figure 9b). Note that in these scenarios, it is assumed that the user is familiar with the roads.
Clearly, Plan 1 and Plan 2 have a huge impact on routing since the time, distance, and cost have all increased. This paper highlights approaches and opportunities to develop and improve routing in cities such as Riyadh that are affected by the rapid changes in road conditions due to construction, modifications, and maintenance.
Furthermore, traffic disruptions can be caused by either a full or partial road block. A full road block is a condition where the road is totally closed and the user has to find another way to reach his/her destination.
Figure 10 shows a reroute strategy where a car cannot reach point X in a direct way due to a change in traffic conditions; therefore, the driver must take a different route to his/her destination. It is common to have to change the route to a destination, and some navigation systems such as Google Maps and Waze will respond to the change of road conditions and reroute the users accordingly. However, since these maps always rely on users’ reports on the latest road conditions, some changes are not identified until drivers find themselves going the wrong way or are stuck in a heavy traffic jam.
Another traffic disruption can be caused by a partial road block. In this situation, one of the lanes could be closed, causing traffic congestion even though the traffic can still move. Most of the current navigational systems will not recognize the cause of this disruption unless users report the event to the server.
For example, a road accident may be blocking half of the road, but traffic can still flow, albeit at reduced speed, thereby causing heavy traffic congestion. Although the road can still be used, navigational systems such as Google Maps or Waze will try to avoid this road unless it is the only route to the destination. Partial road blocks can also be caused by road construction or maintenance works, broken-down vehicles, public events, rain, utility maintenance, or emergency situations. Some events need to be managed promptly and effectively in order to prevent a heavy traffic jam. Next, the independent map enhancement approach for spatial road networks is explained.
4. Independent Map Enhancement
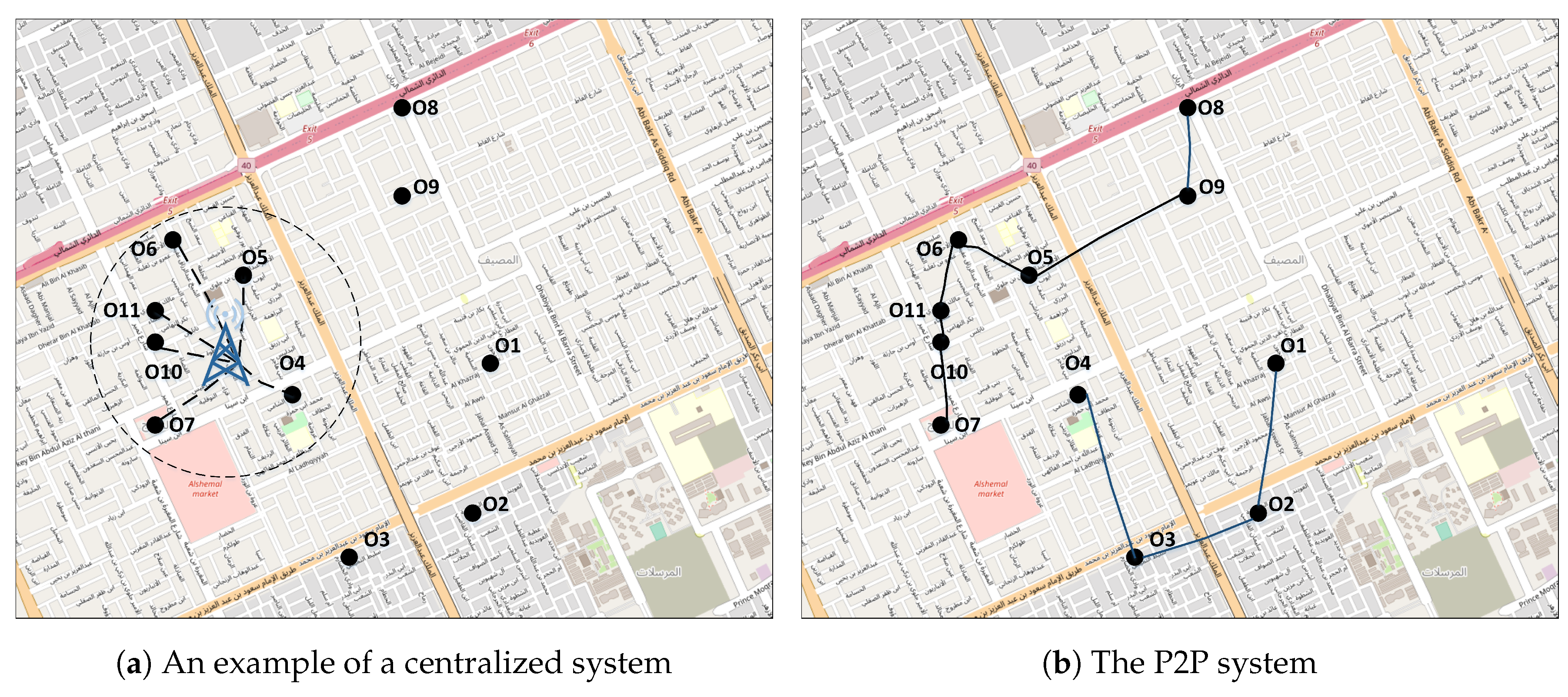
Currently, peer-to-peer networks have become popular because of their scalability [36]. Because of the limitations of centralized systems, the development of mobile Peer-to-Peer (P2P) systems presents favorable solutions. P2P can solve problems caused by central failure (station-based) and isolated points. With P2P, people can contact each other or exchange data with their reachable surrounding objects (e.g., drivers in vehicles) through range wireless communication (e.g., ad hoc WiFi, Bluetooth, cloud infrastructure, etc.) [37]. In a P2P system, the interconnected peers are based on the neighborhood concept [38]. The neighborhood is a concept that can facilitate an understanding of the surrounding environment and enables contact among a cluster of objects [38]. Note that the issue of isolated neighborhoods can be resolved using long-range communication, which enables two neighborhoods to communicate with each other. This can be achieved by using a wireless mesh network system, which can combine two types of communication: short-range and long-range [39].
Figure 11a gives an example of a centralized system. As is clear, the objects , , , , and are out of communication range; whereas, the P2P system can resolve the issue of a centralized station by removing the need for such stations. Figure 11b illustrates how a mobile P2P system can resolve the issue of a centralized station. It is clear from Figure 11b that other objects now allow more objects, such as (similarly , , , and ), to join the communications within the network environment. Moreover, the neighborhoods are able now to communicate with each other because of the combination of two types of communication: short-range and long-range [39].
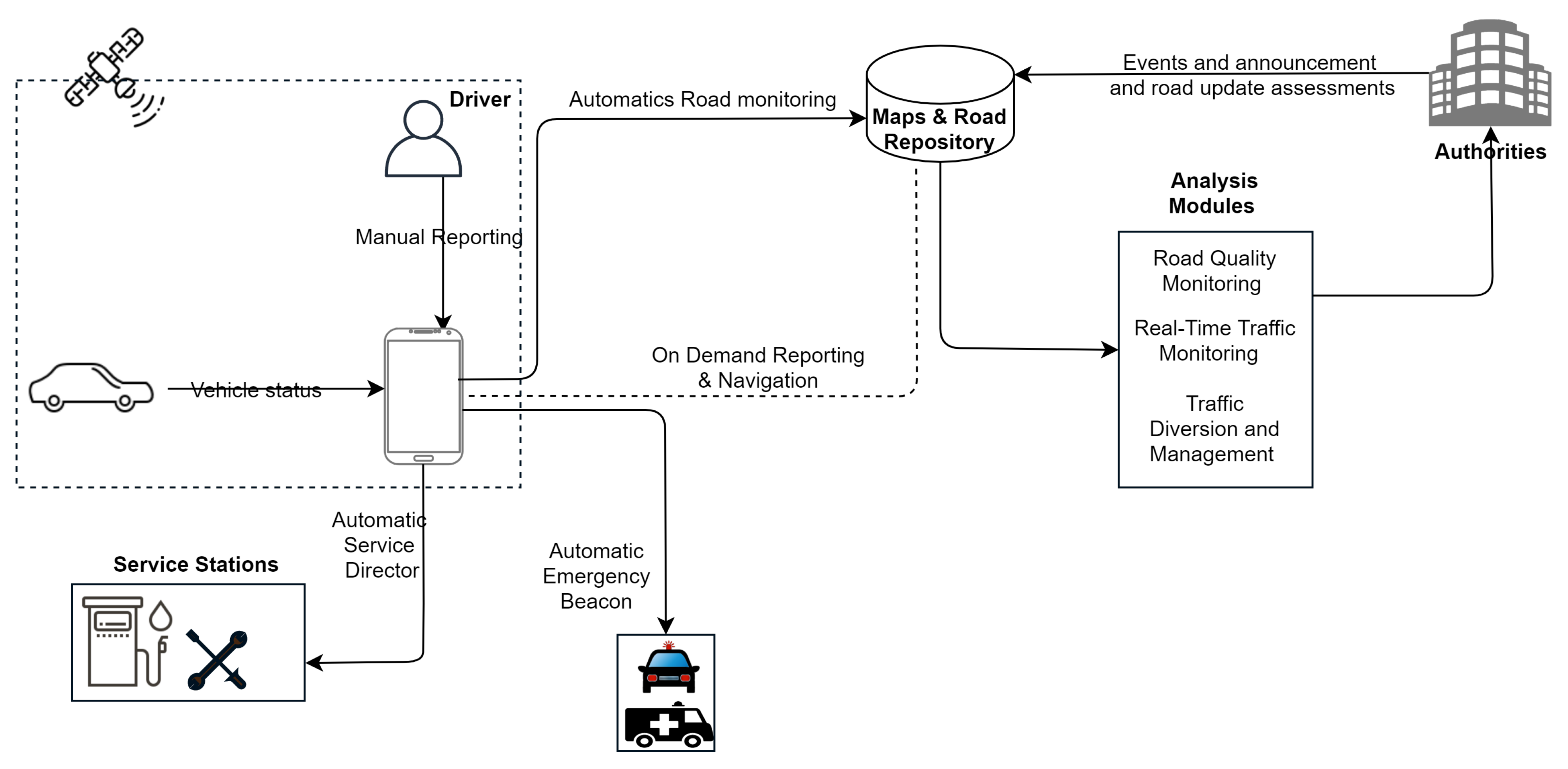
An independent map enhancement approach is a method whereby maps are updated, reviewed, and renewed based on users’ movements. The Independent Map Enhancing (IME) approach is a method used for monitoring the most current road condition and adapting the navigational system to this condition. The IME framework is depicted in Figure 12 below. It shows the proposed IME framework, which has seven modules: input, automatic service director, automatic emergency beacon, analysis, navigation, new road segments identification, and new-road detour system. Each module is described below.
4.1. Input Module
The IME has three input feedback scenarios: automatic road monitoring, users feedback, and authorities’ entries. Each component is explained below.
4.1.1. Automatic Road Monitoring
The Automatic Road Monitoring (ARM) component is central to the approach, as the system will monitor each vehicle’s status (such as speed, revs, fuel, breaking frequencies), which can be obtained from vehicles’ on-board computers and the environment, such as where the vehicle is heading, locations, altitude, inclination, and road conditions that can be determined from the vehicle’s vibration.
In detecting an undefined new road, ARM will record the road condition and send the information via the P2P system, which will determine whether the road is accessible. The problem that is commonly found in Riyadh is that the existence of a new road might not have been reported, so some GPS will assume the users are in the middle of the desert.
To detect the traffic condition, the ARM analyzes the driving pattern of a group of nearby vehicles, and the result can be used as an early warning system for other users nearby or heading to this location.
When detecting a road block, either partial or total, the system will also monitor the driving path. If a vehicle encounters obstacles and the driver leaves predefined paths, the system will perform a cross-check validation of other vehicles taking a similar path to determine whether there is a road block. The result can be used as an early warning system to alert other drivers heading in the same direction so they can avoid the road block and take a different route to the same destination.
For example, for a user A driving to his/her destination H, the system detects a light traffic jam, and the driver leaves predefined paths, therefore by checking the validation of other vehicles taking a similar path to determine that there is a road block (in Figure 13, vehicles , , and ). The system will send an early warning to alert other drivers heading in the same direction, and it will suggest alternative roads (which are open temporarily) based on the others’ feedback information (for example, vehicles and in Figure 13). Because of the construction, a temporary road can be a new segment or a changed road direction (e.g., dashed lines in Figure 13).
The ARM module consists of two parts. The first is the vehicle on-board diagnostic module that enables communication from vehicle computers and mobile devices. This module uses the OBD2 standard to read the vehicle status, and the data are processed on the mobile device. Sensors on the mobile device are utilized to obtain data on environmental conditions. These sensors are:
- Compass/magnetometer: This sensor is used to determine the heading of the vehicle, based on the Earth’s magnetic field [40].
- Accelerometer: This sensor is used to determine rapid movement in the axes. In the other words, this sensor can be used to monitor the vehicle’s vibration, which can indicate the condition of the road [41].
- Gyroscope: This sensor is used to determine the slope in 3D axes [40].
- Altimeter: This sensor is used to determine the elevation of the road in terms of sea level. This sensor is very useful if the road is not located on a flat area, but for example, on a hill [40].
4.1.2. User Feedback
Users’ feedback is used as additional information about an event. For example, when there is an accident, the AMR can only detect a possible traffic jam, but captures no information about the actual event itself. Therefore, it is up to the user to give an additional report to the P2P system, so that other users will know the exact nature of the event; moreover, the traffic density or level of congestion can be determined by the driving pattern of nearby vehicles.
4.1.3. Authorities’ Entries
Road and traffic authorities use data entries to anticipate traffic congestion due to scheduled roadworks and maintenance or events that will block a road partially or fully. Furthermore, authorities will perform an assessment of the new updates which already existed on the map by the approaches. Furthermore, the authorities are responsible for updating information about possible future traffic congestions in order to prevent users or navigational systems from choosing a route to a problematic location.
4.2. Automatic Service Director
The automatic service director acts as a private mechanic that will monitor vehicle performance and status. The module will read the status of the vehicle from its on-board computer through a wireless OBD2 port, where the data will be analyzed [42]. The automatic service director will make suggestions to the driver and guide him/her to, for example, the nearest service station, based on what the driver requires.
During a long drive, some people are usually unaware of their vehicles’ status, such as the remaining fuel or the engine temperature. This could become a problem if they are driving to new, unfamiliar places. With the IME method, the system is integrated with the vehicle’s on-board computer to determine the most suitable and nearest service station. For example, if the on-board computer detects that the remaining fuel will last for a distance of only 100 km, then the system will automatically suggest petrol stations located nearby according to the direction in which the vehicle is heading.
Furthermore, when the on-board computer detects a high increase in engine temperature, the system will automatically find the nearest service station and suggest that the driver take the vehicle to it.
4.3. Automatic Emergency Beacon
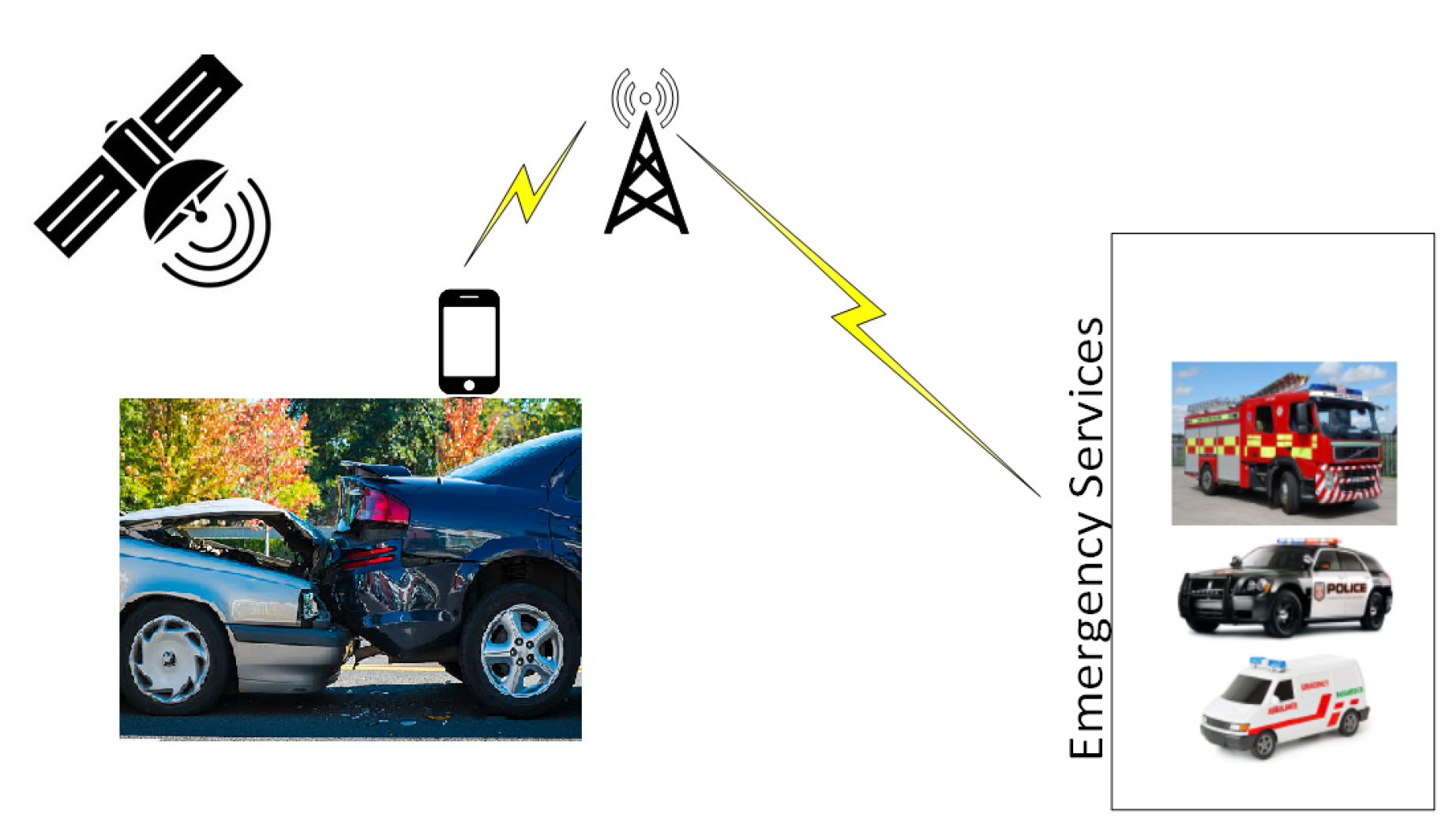
The on will act as a distress signal to all emergency stations if an accident has been detected. Reading the vehicle status, GPS, and environmental status, the system will monitor whether or not an accident has occurred. This will speed up the emergency report and subsequently will ensure a prompt response from emergency units.
Vehicle accidents are a common occurrence on roads and can be fatal. A single road accident can involve one or more vehicles and can be caused by factors such as a vehicle fault or driver error. In some road accidents, especially on a single road, the driver and passengers might be unconscious or require emergency assistance. Their only chance of survival may depend on other drivers seeing them and contacting emergency services. However, in rural or remote areas, the accident site might not be seen by others, or seen when it is too late. The automatic emergency beacon in the IME works similarly to the location-based emergency system. However, in addition, it will detect the impact received by the car and calculate the damage done to it. Since this system runs independently of the car, it will continue to operate even though the car has been damaged by the impact of the crash.
Figure 14 shows how an automatic emergency beacon works. The system relies on a cellular network when contacting the nearest emergency service, based on the location of the accident.
If an accident involves several vehicles, the number of emergency beacons transmitted to the emergency services will indicate the number of vehicles involved in the accident. The location sent to the emergency services will be the location where the impact occurred and the final location after impact, since, in some cases, the vehicle’s final location may be different from the site of the initial impact, as shown in Figure 15 below.
Figure 15 shows a Tesla Model S in Northern Florida on July 2016 that crashed into a truck that was turning left in front of it [43]. The Tesla then ran off the road, hitting a fence and a power pole before coming to a stop. As can be seen from this figure, it is clear that the site of the impact and final location of the vehicle were different. In some cases, the final location can be very difficult to find. Therefore, in this approach, the emergency beacon will be sent upon impact and after the vehicle has come to a standstill.
4.4. Analysis Modules
This module provides a comprehensive amount of traffic data and people movement patterns that can be used by the authorities to manage the road and traffic conditions, or to plan city development. There are three analysis modules: road quality monitoring, real-time traffic monitoring, and traffic diversion and management. These parts are explained below.
4.4.1. Road Quality Monitoring
The mobile sensors used for independent road enhancement can be programmed to sense vehicle vibration during movement. The vibration readings can be logged and used to determine the condition of the road in a certain area. By using the road data collected directly and anonymously from the users, the authorities can monitor the condition of a road in real time, enabling them to schedule the road maintenance at the right place where needed.
4.4.2. Citizen Movement Monitoring
Independent road enhancement is meant to track vehicle movements anonymously. For the city’s long-term development, the regular tracking data log can be used to obtain the citizens’ movement patterns. These patterns are very useful as they enable authorities to manage traffic efficiently in a certain location and obtain relevant traffic-related data such as: (a) an area’s rush-hour periods; (b) the busiest intersections; (c) the roads with the heaviest traffic; and (d) the amount of time people spend on the road.
4.4.3. Real-Time Traffic Jam Monitoring
The traffic density can be determined by analyzing the number of vehicles on a certain section of road, their speed, direction, and braking pattern, and the vehicle status. High traffic density is one of the main causes of traffic jams. Therefore, in a real-time navigational system, the early detection of a possible traffic jam is very important. By detecting the traffic density, a navigational system can warn drivers to avoid the road segment, even before the traffic jam occurs, and traffic authorities can start to organize contingency plans to prevent the traffic jam.
4.5. Navigating System
The navigation system is one of the main modules in our approach, where the driver can navigate using existing maps and real-time road conditions, traffic, disruptions, and new or possible routes. The independent map enhancement method consists of a set of approaches that work together to respond to an unexpected change in road conditions. The aim is to provide a means by which users can utilize a map system that can adapt to recent, unexpected changes.
4.6. New Road Segment Identification
Most cities have ongoing development plans, particularly in terms of roads, that facilitate people movements. However, the updating of roads in navigational systems does not always occur in real time, especially for the roads that are closed for a few hours for maintenance purposes. These roads are more likely to not be updated in the GPS services since reporting will take a long time to consider. In fact, in most cases, these roads will go back to their original situations before uploading is approved by the GPS service. However, in the meantime, thousands of travelers have been affected by these un-updated road maps, especially in large cities.
With the proposed independent road enhancement method, every time a user travels along an unidentified section of road, this path will be considered as a candidate for a new road section. Based on the number of users of this new section of road, the vehicle speed, the road quality reading, and vehicle directions, the IME method can automatically determine whether or not the new path is a new section of road. Note that the vehicles communicate with each other through a range ad hoc network (or cloud infrastructure). Thus, the navigational system can be updated (in a very short time) to use the new road section to improve the user’s experiences with a navigational system. Note that since the target is a temporary new segment, when the original section is reopened and the temporary segment is no longer required (because maintenance construction work is finished), the update will be applied promptly to the original section using the same method.
4.7. New-Road Detour System
In some cities, the traffic authorities might need to change a particular route temporarily for the purpose of traffic control. As mentioned previously, the current navigational system might be able to adapt promptly to the changes. By analyzing the movement pattern of the users, IME can be used to determine whether or not there are any changes to the route (detecting road detour). The prompt detection of a traffic route change is crucial in a navigational system since not all users may be aware of changes and may find themselves in a tight spot on the road. Note that the new-road detour system will focus on detecting the road detour that is created by authorities to control road managements.
5. Discussion and Potential Applications
As mentioned previously, current GPS services do not conduct prompt updates of altered conditions in a spatial road network. This issue is common in some cities where drivers will be forced to suddenly start looking for alternative roads to their destination due to road maintenance works. Therefore, independent map enhancement approaches have attempted to improve various aspects of spatial road networks in order to assist road users in reaching their destinations. By using the P2P system, where peers are interconnected based on the neighborhood concept, the Automatic Road Monitoring (ARM) component will record the road condition and send the report to the system, which will determine whether the road is accessible.
There are some works focused on controlling traffic conjunctions based on swarm intelligence, which is inspired by particle swarm optimization [44]. Furthermore, some works focused on swarm intelligence approaches to find successful cycle programs of traffic lights [45]. Most works used swarm intelligence for road traffic in order to find light traffic or control traffic conjunctions based on the objects’ interactions. In this paper, the swarm intelligence approach was not adapted in the approaches. The paper’s main direction is to update the actual spatial road network that has been blocked (or closed or a new segment created) through P2P communications, because of the maintenance in developing cities, which is the basic issue that might cause the traffic congestion in the first place.
Cities are generating many types of geospatial data. In recent years, traffic congestion due to the inaccuracy and late update of the current roads has become a severe problem, not only causing economic losses, but also negatively influencing the quality of life of city residents [46]. Therefore, the proposed independent map enhancement can play an important part in the traffic management to increase the competence and safety of city transportation. For example, new road segment identification helps with updating roads in navigational systems rapidly, especially for the roads that are closed for a short time for maintenance purposes, similarly to the new road detour system, which determines whether or not there are any updates to the route (detecting road detour), which assists mainly the traffic management.
In addition, traffic delays do not only waste time, they also waste money, and therefore, smart traffic systems are among the important smart city solutions to the road and traffic issues in developing cities. Through the P2P system update, all the proposed modules are in the interest of smart city traffic solutions. For example, the automatic service director will make suggestions to the driver and direct him/her based on the his/her requirement. This will enhance the traffic management significantly. Moreover, the automatic emergency beacon can also act as a distress signal to all emergency stations in case an accident is identified, also speeding up the emergency report and subsequently ensuring a prompt response from emergency units.
In addition, an automatic service director will monitor vehicle performance and status. Based on the data that are obtained from the automatic service director, the system can make suggestions to the driver based on his/her requirements. With the independent road enhancement approaches, every time a user travels along an unidentified section of road, an unidentified path will be considered as a candidate for a new road section through the P2P system. Then, based on the number of users of this new section of road and some other aspects such as vehicle speed and vehicle directions, the IME method can automatically determine the path as a new section of road.
There are many potential applications that can be derived from this research:
- A system that can run independently to monitor the road conditions, and especially to update maps to include newly-constructed roads.
- A system that can analyze road congestion, traffic density, and people movements during certain times to produce a better traffic network and improve road management.
- Continuous monitoring of driver behavior to determine people’s reactions to a specific section of road or a certain area.
- A better routing navigation system that takes into account the most recent changes to a road network.
- A system where authorities can promptly supply information about potential road disruptions so that users can avoid these locations as early as possible.
- A system that can suggest to the driver the nearest service stations or other facilities that may be required, based on the vehicle’s on-board computer readings.
- A system that can act as an automatic emergency alarm when an accident is encountered so that emergency services can respond promptly.
As mentioned previously, this work focuses only on the conceptual ideas and approaches. Furthermore, the quality assessments (errors of the vehicles) are a very important aspect to be considered in future work. As is clear, this work does not consider the evaluation of the proposed modules. Therefore, future research undertakings could focus on the development of detailed algorithms for Automatic Road Monitoring (ARM), which will be responsible for monitoring each vehicle’s status (such as speed, breaking frequencies), which can be obtained from the vehicle’s on-board computer. Using these data in addition to the locations and altitude of the vehicle, ARM will record the road condition based on the data obtained from the P2P neighborhood system and will report promptly and accurately the condition of a particular road. Moreover, a model could be designed that incorporates the users’ feedback on the actual event that is causing the traffic jam. Therefore, the P2P neighborhood system relies on users to provide additional reports so that other users will know the nature of the event, and the density or traffic congestion level can be determined by the driving behaviors of users in nearby vehicles. An automatic service director could provide suggestions to the driver and guide him/her to the nearest required facility such as a service station. This module could also provide a comprehensive range of traffic data and people movement patterns. The overall aim is to provide a system whereby users can utilize a recent map system that adapts to and provides details about sudden changes to road conditions.
6. Conclusions
This paper discusses the advantages of having a peer-to-peer updating mechanism for spatial road networks. In many cities, the spatial road network is not adequately or promptly updated if there are many changes to road conditions because of maintenance works. Therefore, when a user plans a trip to a certain location, it may be that he/she cannot take his/her usual route because of changed road conditions, but the spatial road network data in the GPS are not updated. This can affect the user in many ways. For example, a trip that usually takes five minutes might now take half an hour. The city of Riyadh in Saudi Arabia is chosen as the case study since the construction of the metro is causing these types of problems. Therefore, the aim of this work is to examine the advantages of using a peer-to-peer updating mechanism to help the user find an alternative route when the road usually taken is no longer assessable due to a change in road conditions. Note that this work focuses only on the conceptual ideas and approaches in order to obtain the independent map enhancement.
Furthermore, there are many advantages and possible applications of this approach that can run independently for monitoring the road conditions. For example, it can be used for updating maps for newly-constructed roads, providing a system that can analyze road congestions, providing a system that analyzes traffic density and people movements during a certain time. Furthermore, applications can be developed that monitor drivers’ behaviors and reactions on sections of roads or in a certain area.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare that they have no conflicts of interest to report regarding the work.
References
- Li, Z.; Chen, L.; Wang, Y. G*-tree: An efficient spatial index on road networks. In Proceedings of the 2019 IEEE 35th International Conference on Data Engineering (ICDE), Macao, China, 8–11 April 2019; pp. 268–279. [Google Scholar]
- Alamri, S.; Taniar, D.; Safar, M. A taxonomy for moving object queries in spatial databases. Future Gener. Comput. Syst. 2014, 37, 232–242. [Google Scholar] [CrossRef]
- Yao, X.; Jiang, X.; Wang, D.; Yang, L.; Peng, L.; Chi, T. Efficiently mining maximal co-locations in a spatial continuous field under directed road networks. Inf. Sci. 2020, 542, 357–379. [Google Scholar] [CrossRef]
- Alamri, S.; Taniar, D.; Safar, M. Indexing moving objects for directions and velocities queries. Inf. Syst. Front. 2013, 15, 235–248. [Google Scholar] [CrossRef]
- Alamri, S.; Taniar, D.; Safar, M.; Al-Khalidi, H. Tracking moving objects using topographical indexing. Concurr. Comput. Pract. Exp. 2013, 27, 1951–1965. [Google Scholar] [CrossRef]
- Kim, K.-S.; Kim, S.-W.; Kim, T.-W.; Li, K.-J. Fast indexing and updating method for moving objects on road networks. In Proceedings of the Fourth International Conference on Web Information Systems Engineering Workshops, WISEW’03, Rome, Italy, 13 December 2003; pp. 34–42. [Google Scholar]
- Alamri, S.; Taniar, D.; Nguyen, K.; Alamri, A. C-tree: Efficient cell-based indexing of indoor mobile objects. J. Ambient. Intell. Humaniz. Comput. 2020, 11, 2841–2857. [Google Scholar] [CrossRef]
- Islam, M.S.; Shen, B.; Wang, C.; Taniar, D.; Wang, J. Efficient processing of reverse nearest neighborhood queries in spatial databases. Inf. Syst. 2020, 92, 101530. [Google Scholar] [CrossRef]
- Lin, H.; Peng, L.; Chen, S.; Liu, T.; Chi, T. Indexing for Moving Objects in Multi-Floor Indoor Spaces That Supports Complex Semantic Queries. ISPRS Int. J. Geo Inf 2020, 5, 176. [Google Scholar] [CrossRef] [Green Version]
- Shao, Z.; Cheema, M.A.; Taniar, D. Trip Planning Queries in Indoor Venues. Comput. J. 2018, 61, 409–426. [Google Scholar] [CrossRef]
- Park, S.; Park, S. Reverse collective spatial keyword query processing on road networks with g-tree index structure. Inf. Syst. 2019, 84, 49–62. [Google Scholar] [CrossRef]
- Harrou, F.; Zeroual, A.; Sun, Y. Traffic congestion monitoring using an improved kNN strategy. Measurement 2020, 156, 107534. [Google Scholar] [CrossRef]
- Zhang, D.; Jiang, Y. Design of Urban Intelligent Traffic Congestion Situation Monitoring System Based on Big Data. In Proceedings of the 2020 International Conference on Intelligent Transportation, Big Data & Smart City (ICITBS), Vientiane, Laos, 11–12 January 2020; pp. 2–15. [Google Scholar]
- Jain, N.K.; Saini, R.K.; Mittal, P. A Review on Traffic Monitoring System Techniques. Soft Comput. Theor. Appl. 2019, 742, 569–577. [Google Scholar]
- Chang, J.-W.; Um, J.-H.; LeeP, W.-C. A new trajectory indexing scheme for moving objects on road networks. In Lecture Notes in Computer Science, Proceedings of the Flexible and Efficient Information Handling, Belfast, UK, 18–20 July 2006; Springer: Berlin/Heidelberg, Germany, 2006; Volume 4042, pp. 291–294. [Google Scholar]
- Haryanto, A.A.; Islam, M.S.; Taniar, D.; Aamir Cheema, M. Ig-tree: An efficient spatial keyword index for planning best path queries on road networks. World Wide Web 2019, 22, 1359–1399. [Google Scholar] [CrossRef] [Green Version]
- Hu, H.; Lee, D.L.; Lee, V.C.S. Distance indexing on road networks. In Proceedings of the 32nd International Conference on Very Large Data Bases, VLDB ’06, Seoul, Korea, 12–15 September 2006; pp. 894–905. [Google Scholar]
- Wu, L.; Xiao, X.; Deng, D.; Cong, G.; Zhu, A.D.; Zhou, S. Shortest path and distance queries on road networks: An experimental evaluation. Proc. VLDB Endow 2012, 5, 406–417. [Google Scholar] [CrossRef]
- Dijkstra, E.W. A note on two problems in connexion with graphs. Numer. Math. 1959, 1, 269–271. [Google Scholar] [CrossRef] [Green Version]
- Taniar, D.; Rahayu, J.W. A taxonomy for nearest neighbour queries in spatial databases. J. Comput. Syst. Sci. 2013, 79, 1017–1039. [Google Scholar] [CrossRef]
- Wang, Y.; Chen, Y.; Ye, F.; Liu, H.; Yang, J. Implications of smartphone user privacy leakage from the advertiser’s perspective. Pervasive Mob. Comput. 2019, 53, 13–32. [Google Scholar] [CrossRef] [Green Version]
- Xuan, K.; Zhao, G.; Taniar, D.; Safar, M.; Srinivasan, B. Constrained range search query processing on road networks. Concurr. Comput. Pract. Exp. 2011, 23, 491–504. [Google Scholar] [CrossRef]
- Taniar, D.; Rahayu, J.W. A taxonomy for region queries in spatial databases. J. Comput. Syst. Sci. 2015, 81, 1508–1531. [Google Scholar] [CrossRef]
- Zhao, G.; Xuan, K.; Taniar, D.; Srinivasan, B. Incremental k-nearest-neighbor search on road networks. J. Interconnect. Netw. 2008, 9, 455–470. [Google Scholar] [CrossRef]
- Luo, X.; Xia, Y.; Zhu, Q.; Li, Y. Boosting the k-nearest-neighborhood based incremental collaborative filtering. Knowl.-Based Syst. 2013, 53, 90–99. [Google Scholar] [CrossRef]
- Zhao, G.; Xuan, K.; Taniar, D.; Safar, M.; Srinivasan, B. Time constraint route search over multi-locations. Knowl. Eng. Rev. 2014, 29, 217–233. [Google Scholar] [CrossRef]
- Haidar, A.-K.; Taniar, D.; Betts, J.; Alamri, S. On finding safe regions for moving range queries. Math. Comput. Model. 2013, 58, 1449–1458. [Google Scholar]
- Tang, J.; Deng, M.; Huang, J.; Liu, H.; Chen, X. An Automatic Method for Detection and Update of Additive Changes in Road Network with GPS Trajectory Data. ISPRS Int. J. Geo-Inf. 2019, 8, 411. [Google Scholar] [CrossRef] [Green Version]
- Wu, T.; Xiang, L.; Gong, J. Updating Road Networks by Local Renewal from GPS Trajectories. ISPRS Int. J. Geo-Inf. 2016, 5, 163. [Google Scholar] [CrossRef] [Green Version]
- Chao, P.; Hua, W.; Zhou, X. Trajectories know where map is wrong: An iterative framework for map-trajectory co-optimization. World Wide Web 2020, 23, 47–73. [Google Scholar] [CrossRef]
- Stanojevic, R.; Abbar, S.; Thirumuruganathan, S.; Morales, G.D.F.; Chawla, S.; Filali, F.; Aleimat, A. Road Network Fusion for Incremental Map Updates. In Progress in Location Based Services; Springer: Cham, Switzerland, 2018; pp. 91–109. [Google Scholar]
- Shi, W.; Shen, S.; Liu, Y. Automatic generation of road network map from massive GPS, vehicle trajectories. In Proceedings of the 12th International IEEE Conference on Intelligent Transportation Systems, St. Louis, MO, USA, 4–7 October 2009; pp. 1–6. [Google Scholar]
- Liu, C.; Xiong, L.; Hu, X.; Shan, J. A Progressive Buffering Method for Road Map Update Using OpenStreetMap Data. ISPRS Int. J. Geo-Inf. 2019, 4, 1246. [Google Scholar] [CrossRef] [Green Version]
- Turiceanu, V. Waze not updating maps and driving info. Windows Report. 2019. Available online: https://windowsreport.com/waze-not-updating/ (accessed on 27 December 2020).
- Silva, T.H.; de Melo, P.O.S.V.; Viana, A.C.; Almeida, J.M.; Salles, J.; Loureiro, A.A.F. Traffic condition is more than colored lines on a map: Characterization of waze alerts. In Lecture Notes in Computer Science, Proceedings of the Social Informatics, Kyoto, Japan, 25–27 November 2013; Springer International Publishing: Cham, Switzerland, 2013; pp. 309–318. [Google Scholar]
- Nghiem, T.P.; Maulana, K.; Nguyen, K.; Green, D.; Waluyo, A.B.; Taniar, D. Peer-to-peer bichromatic reverse nearest neighbours in mobile ad-hoc networks. J. Parallel Distrib. Comput. 2014, 74, 3128–3140. [Google Scholar] [CrossRef]
- Kumar, N.; Lee, J.-H. Peer-to-Peer Cooperative Caching for Data Dissemination in Urban Vehicular Communications. IEEE Syst. J. 2014, 8, 1136–1144. [Google Scholar] [CrossRef]
- Allheeib, N.; Islam, M.S.; Taniar, D.; Shao, Z.; Cheema, M.A. Density-based reverse nearest neighborhood search in spatial databases. J. Ambient. Intell. Humaniz. Comput. 2018, 1–12. [Google Scholar] [CrossRef]
- Allheeib, N.; Taniar, D.; Al-Khalidi, H.; Islam, M.S.; Adhinugraha, K.M. Safe Regions for Moving Reverse Neighborhood Queries in a Peer-to-Peer Environment. IEEE Access 2020, 8, 50285–50298. [Google Scholar] [CrossRef]
- Amouri, A.; Alaparthy, V.T.; Morgera, S.D. A machine learning based intrusion detection system for mobile internet of things. Sensors 2020, 20, 461. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Shoaib, M.; Bosch, S.; Incel, Ö.D.; Scholten, H.; Havinga, P.J.M. A survey of online activity recognition using mobile phones. Sensors 2015, 15, 2059–2085. [Google Scholar] [CrossRef] [PubMed]
- Ghasemi, N.; Acerra, E.; Vignalia, V.; Lantieri, C.; Simone, A.; Imine, H. Road Safety Review update by using innovative technologies to investigate driver behavior. Transp. Res. Procedia 2020, 45, 368–375. [Google Scholar] [CrossRef]
- Russell, K.; Singhvi, A. Inside the self-driving tesla fatal accident. The New York Times, 2016. [Google Scholar]
- Tian, D.; Wei, Y.; Zhou, J.; Zheng, K.; Duan, X.; Wang, Y.; Wang, W.; Hui, R.; Guo, P. Swarm Intelligence Inspired Adaptive Traffic Control for Traffic Networks. In Lecture Notes of the Institute for Computer Sciences, Social Informatics and Telecommunications Engineering, Proceedings of the International Conference on Industrial Networks and Intelligent Systems, Ho Chi Minh City, Vietnam, 4 September 2017; Springer: Cham, Switzerland, 2018. [Google Scholar]
- García-Nieto, J.; Alba, E.; Olivera, A.C. Swarm intelligence for traffic light scheduling: Application to real urban areas. Eng. Appl. Artif. Intell. 2012, 25, 274–283. [Google Scholar] [CrossRef]
- Shirowzhan, S.; Tan, W.; Sepasgozar, S.M.E. Digital Twin and CyberGIS for Improving Connectivity and Measuring the Impact of Infrastructure Construction Planning in Smart Cities. ISPRS Int. J. Geo-Inf. 2020, 9, 240. [Google Scholar] [CrossRef]
Figure 1.
Spatial objects in Google Maps.

Figure 2.
kNN and range queries.

Figure 3.
Cellular space, Euclidean space, and spatial road network.

Figure 4.
Shortest network distance and Incremental kNN (IkNN).

Figure 5.
Indicating the newly added roads, point-to-segment matching.

Figure 6.
An example of unmatched trajectories.

Figure 7.
Riyadh.

Figure 8.
The usual routing between A and B.

Figure 9.
Plan 1 or Plan 2 is an alternative route from A to B.

Figure 10.
Rerouting due to a full road block.

Figure 11.
The centralized system and the P2P system.

Figure 12.
Independent map framework architecture.

Figure 13.
An example of the automatic road monitoring scenario.

Figure 14.
Automatic Emergency Beacon.

Figure 15.
Impact and final location of the accident.

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Alamri, S. Independent Map Enhancement for a Spatial Road Network: Fundamental Applications and Opportunities. ISPRS Int. J. Geo-Inf. 2021, 10, 8. https://doi.org/10.3390/ijgi10010008
AMA Style
Alamri S. Independent Map Enhancement for a Spatial Road Network: Fundamental Applications and Opportunities. ISPRS International Journal of Geo-Information. 2021; 10(1):8. https://doi.org/10.3390/ijgi10010008
Chicago/Turabian StyleAlamri, Sultan. 2021. "Independent Map Enhancement for a Spatial Road Network: Fundamental Applications and Opportunities" ISPRS International Journal of Geo-Information 10, no. 1: 8. https://doi.org/10.3390/ijgi10010008
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.