The custom-made analysis tool that briefly described above is utilized for the simulation of various installation scenarios during a submarine cable deployment process. Effect of variations in water depth and bottom tension values in the most crucial installation parameters (minimum actual bending radius, cable exit angle, layback distance and catenary length) during cable deployment are examined. Special attention has been given on the influence of the “out of water” cable segment and the friction exerted by the contact between cable and overboard chute on the critical responses of the cable laying process.
3.1. Water Depth and Bottom Tension Combined Effects
Multiple case studies of a submarine cable deployment process have been modelled and analyzed considering varying water depth values (between 2 m and 200 m) and varying bottom tension values (between 500 kgf and 8000 kgf). Specific bottom tension H values were chosen for the parametric studies because the relevant force that needs to be applied by the onboard tensioning machine (T_tensioner) that all the cable vessels are equipped with is in the capacity range of the available machines in the cable industry for a submarine cable installation up to 200 m water depth. The friction force between cable and overboard chute is calculated using the capstan equation [
25] and the friction coefficient is assumed equal to μ = 0.5. The original capstan equation has been used and modified to fit for the purpose of our problem and presented later on in equation package (8a)–(8d). Relevant results calculated by the custom-made analysis tool are indicatively presented for the lowest value of bottom tension 500 kgf in
Table 2 and for the highest value of bottom tension 8000 kgf in
Table 3.
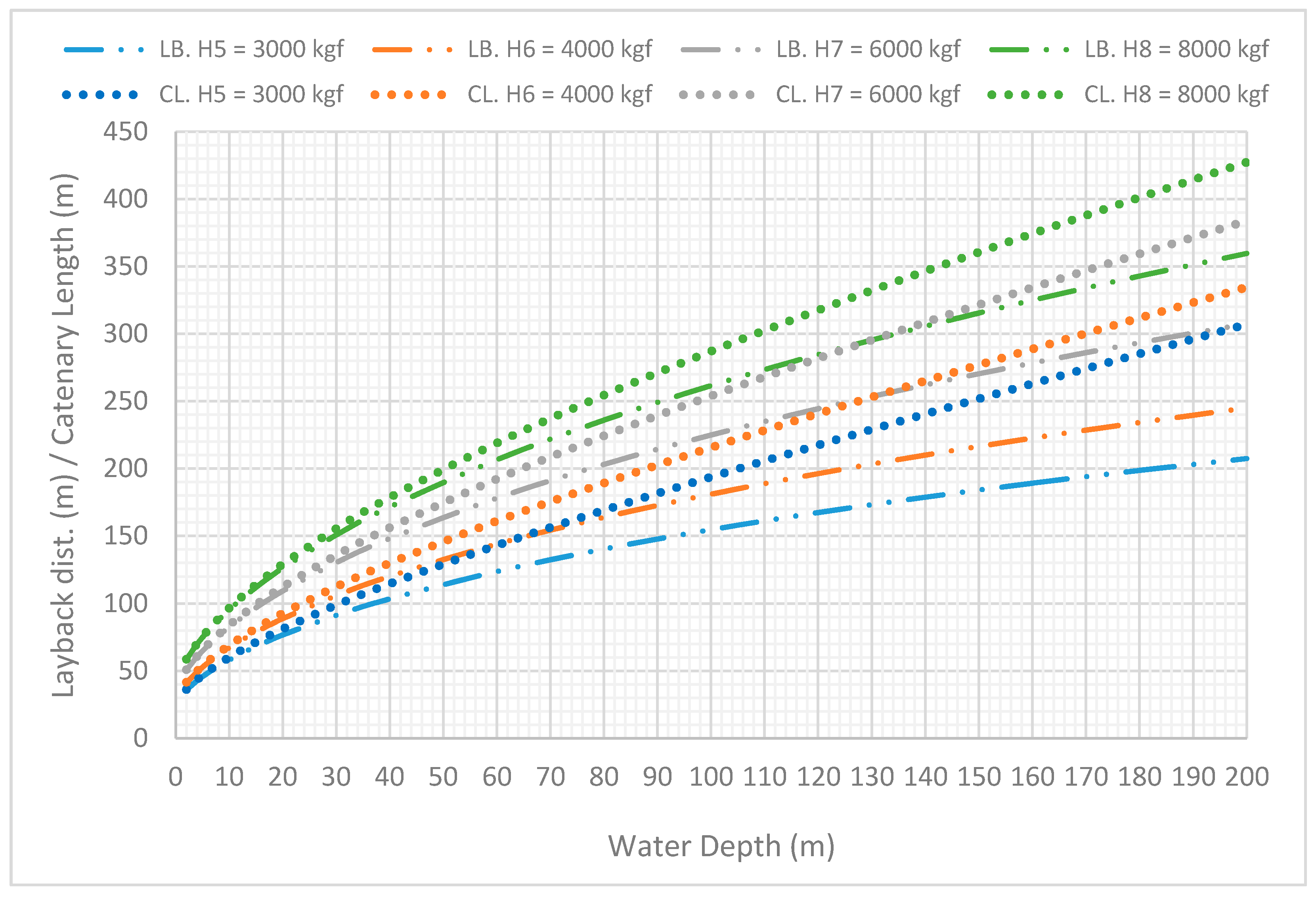
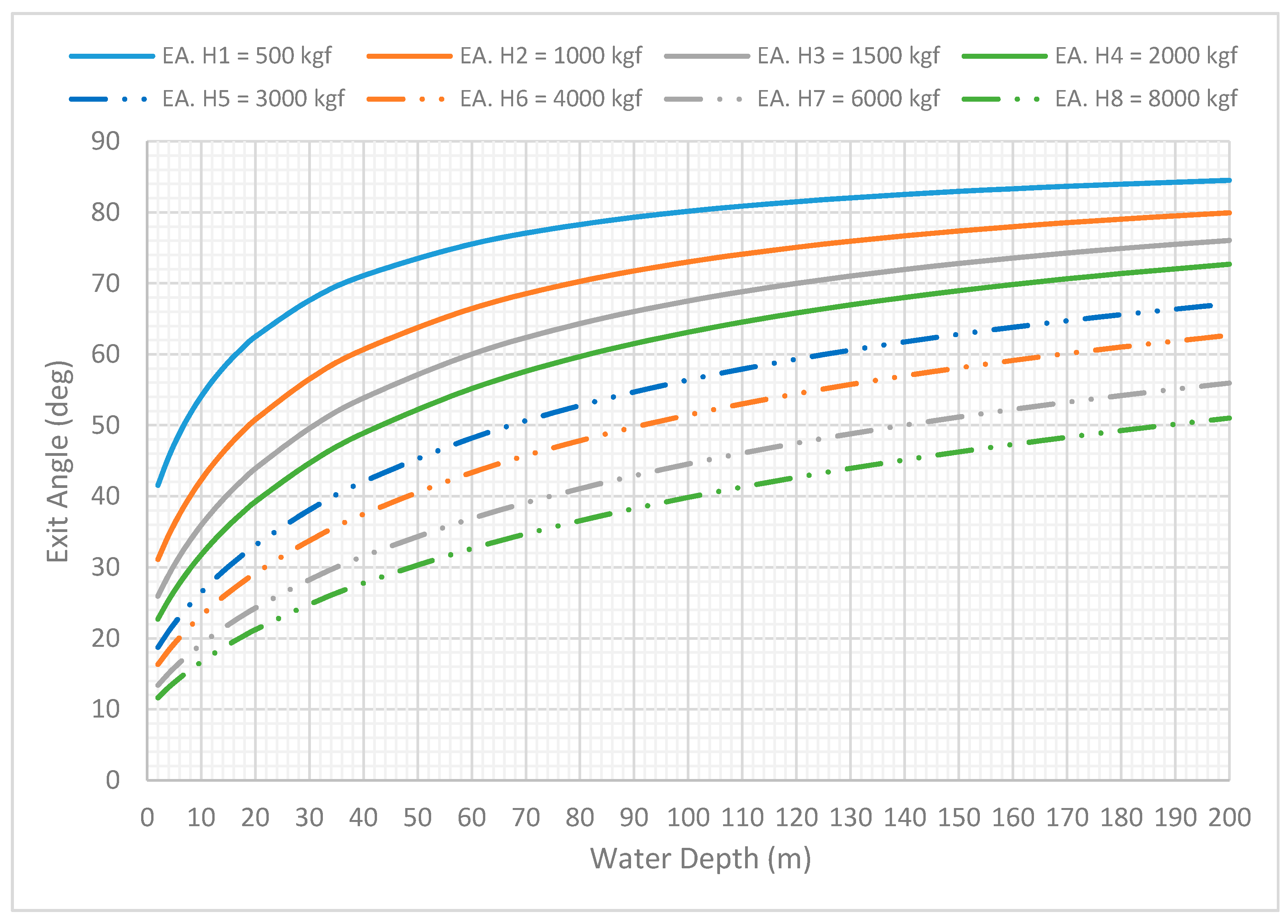
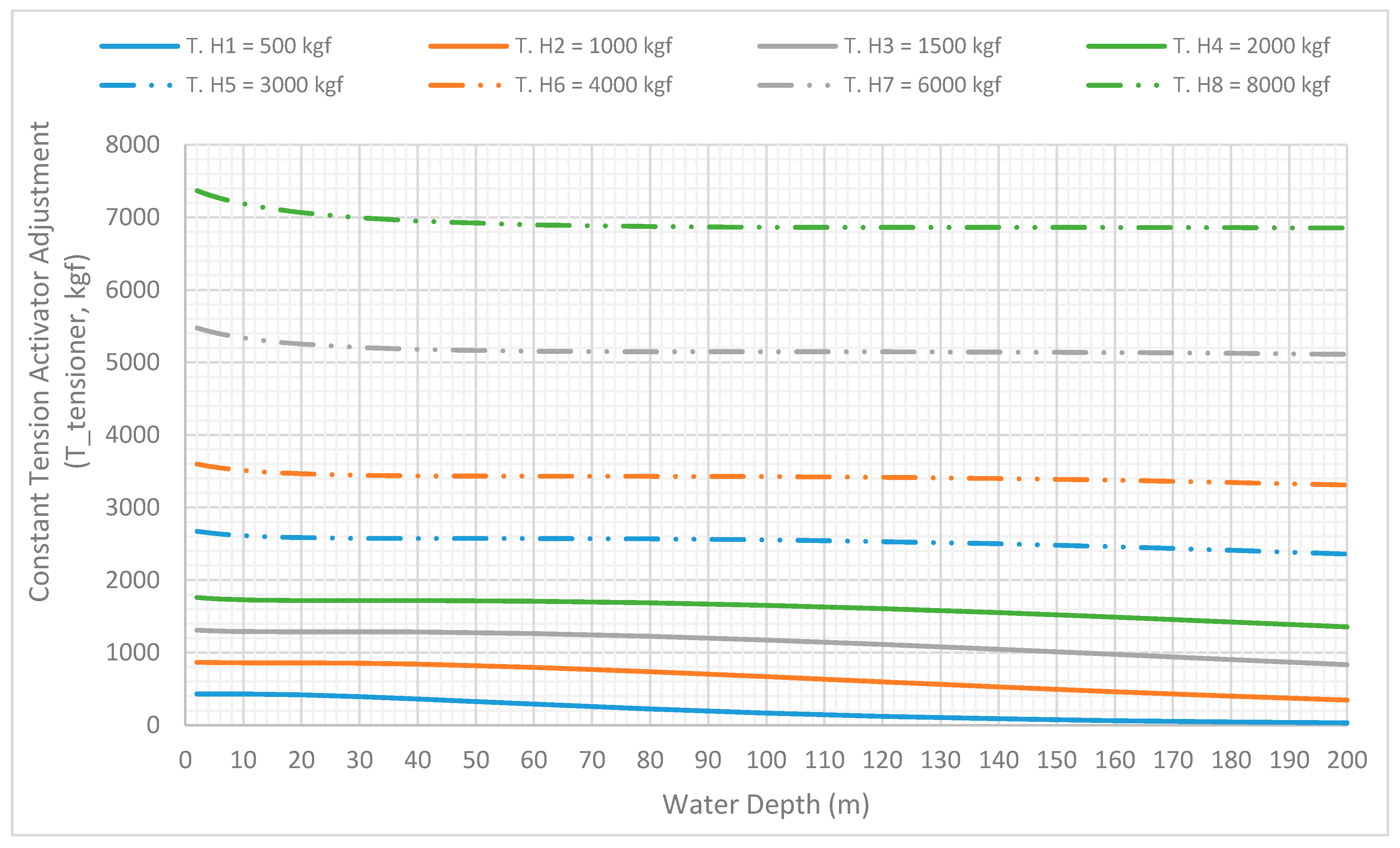
Analyzing different cable lay installation scenarios using a constant bottom tension varying between 500 kgf and 8000 kgf at different water depths, the main findings can be briefly concluded as follows. Layback distance (LB) and catenary length (CL) are increased as the water depth is increased. As the bottom tension is increased, the difference between the layback and catenary length for a specific water depth is decreased because the sag curve of the catenary configuration is becoming smoother. Exit angle (θ) is increased as the water depth is increased, meaning that the exit of the cable from the overboard chute is becoming steeper as the water depth is increased. Constant tension adjustment (T_tensioner) is decreased slightly as the water depth is increased. The reason is that due to the increased exit angle, the friction forces [
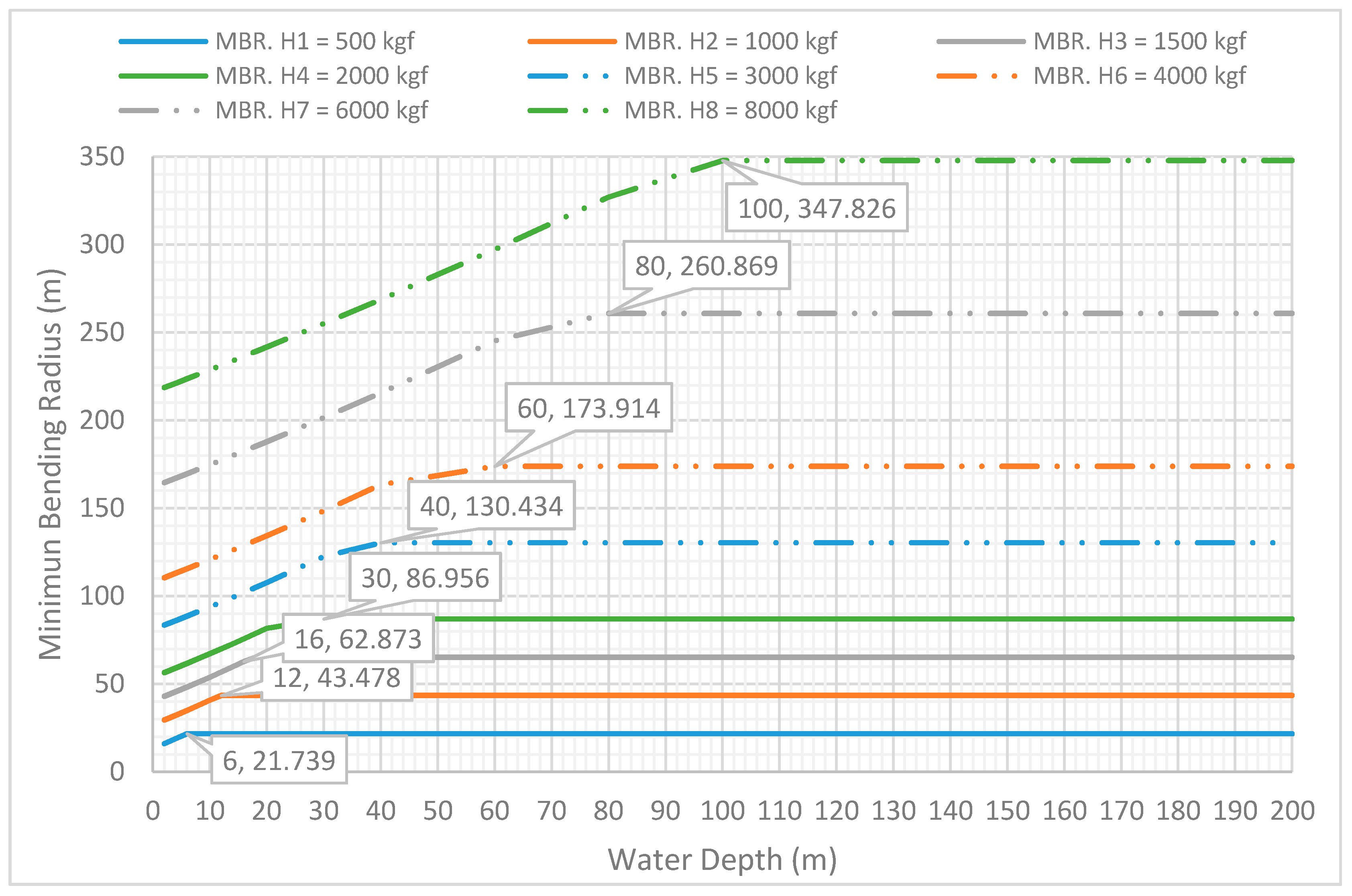
25] created by the contact between cable and overboard chute are increased and this results to less tension requirement by the tension machine to achieve the desired bottom tension. Minimum bending radius (= safety factor during installation) is increased as the water depth is increased up to the depth of 6 m (for 500 kgf) and 100 m (for 8000 kgf). After this depth, the minimum bending radius remains constant. The reason of this observation can be explained by analysing the actual bending radius Equation (1).
For the submerged catenary curve, the minimum bending radius is located at the touch down point where x = 0 and the relevant Equation (1) can be expressed as (2). Therefore, for a specific bottom tension value, the minimum bending radius is constant if the minimum bending radius is located at the submerged part of the combined catenary curve.
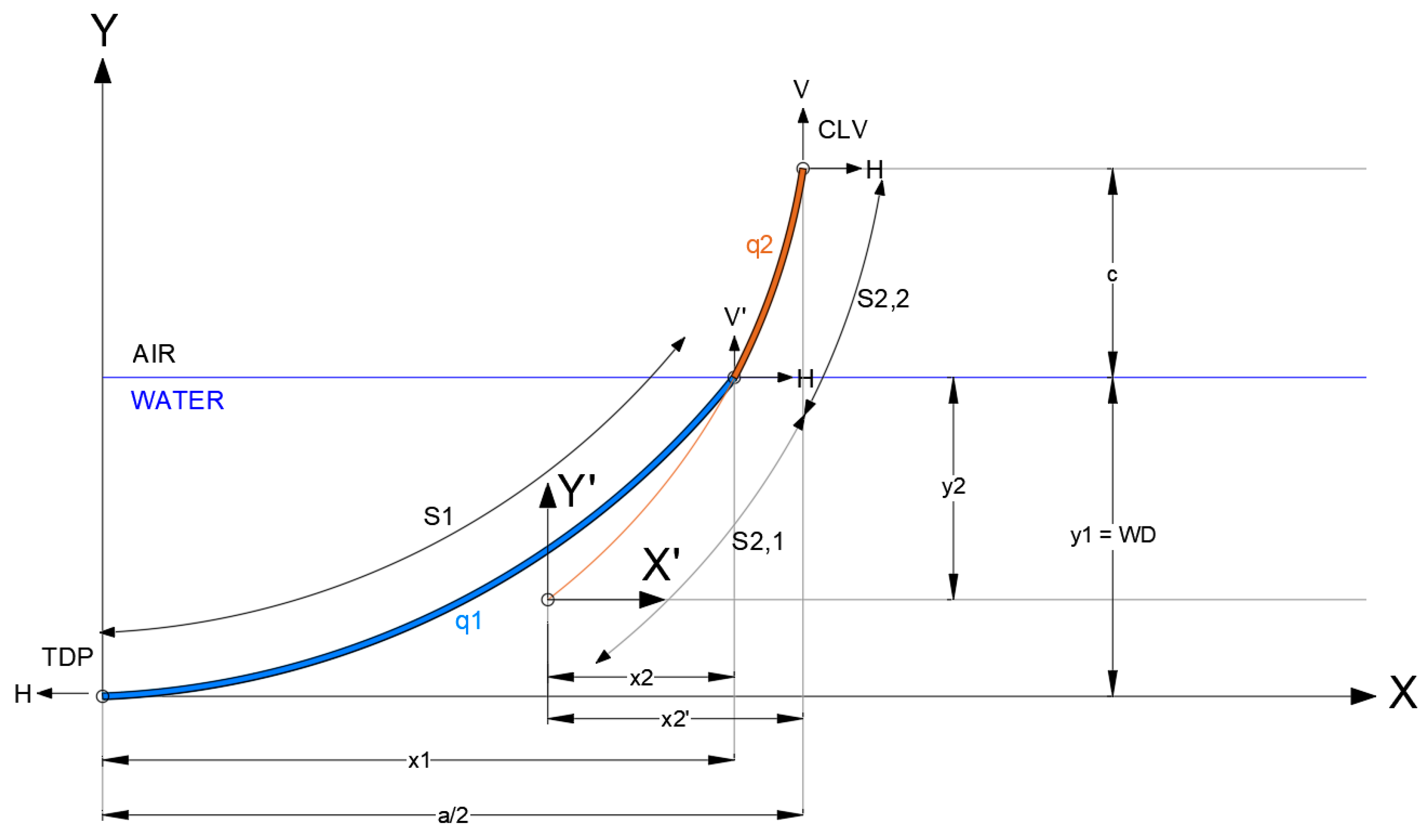
For the catenary curve in air, the minimum bending radius is located at the sea surface (air/water interface) where x = x2 (
Figure 2). This location is varying depending on the specific (a) water depth and (b) bottom tension value. In order to determine how the actual bending radius for the catenary curve in air is varying, the Equation (1) will be expressed in a simpler way as (3).
The value of x2 is increased as the water depth is increased. The quotient (TERM 1/TERM 2) is increased as the water depth is increased for a specific bottom tension value. Therefore, for a specific bottom tension value, the minimum bending radius is variable and increased as the water depth is increased if the minimum bending radius is located at the part in air of the combined catenary curve. In conclusion, the minimum bending radius is variable with the water depth in case it is located at the catenary curve in air (minimum value at the air/water interface) and in contrast the minimum bending radius is constant in case it is located at the submerged part (minimum value at the TDP). Thus, as per
Table 2 and
Table 3 results, the water depth of 6 m and 100 m is the critical water depth for the bottom tension of 500 kgf and 8000 kgf respectively where the minimum bending radius is defined by the submerged part (located at the TDP) and becomes constant for deeper areas assuming the specific bottom tension.
Different installation parameters during a cable deployment process using various bottom tension values and water depths are illustrated in
Figure 4,
Figure 5,
Figure 6,
Figure 7 and
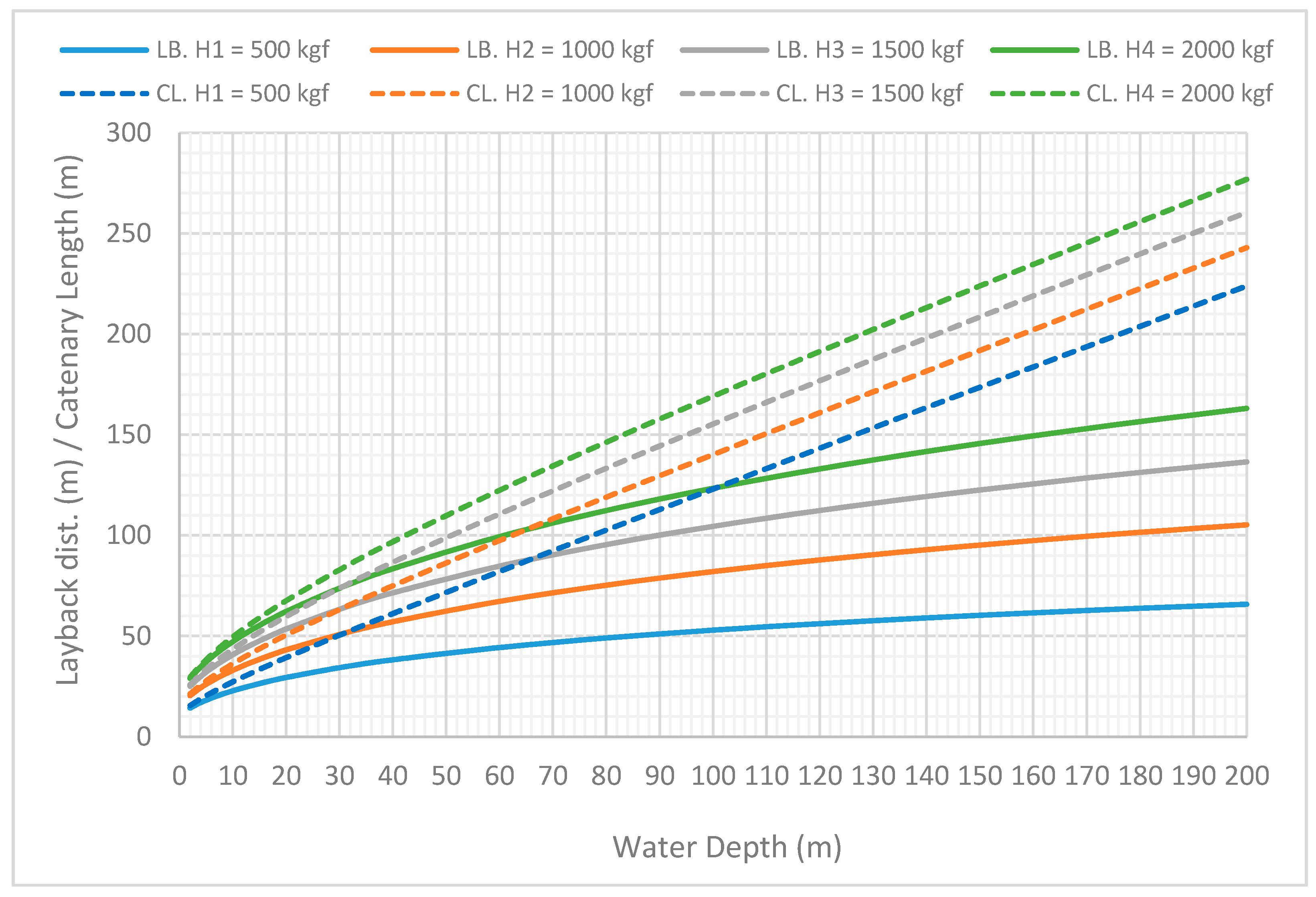
Figure 8. The layback distance (LB) and catenary length (CL) are presented in
Figure 4 and
Figure 5 for bottom tensions 500 kgf–2000 kgf and 3000 kgf–8000 kgf, respectively. The exit angle (θ), minimum bending radius (MBR) and the constant tension activator adjustment (T_tensioner) are presented in
Figure 6,
Figure 7 and
Figure 8, respectively.
The parametric study presented above can be summarized by pointing out the following key rules. Layback distance (LB) and catenary length (CL) are increased as the water depth is increased (assuming constant bottom tension). Layback distance (LB) and catenary length (CL) are increased as the bottom tension is increased (assuming constant water depth). Difference between layback distance (LB) and catenary length (CL) at the same water depth is decreasing progressively as the bottom tension value is increasing, since the catenary curve due to the increased axial tension tends to become a straight line minimizing the sag of the curve. Exit angle (θ) is increased as the water depth is increased (assuming constant bottom tension). Exit angle (θ) is decreased as the bottom tension is increased (assuming constant water depth). It should be noted that as the exit angle is increased, the length of the cable in contact with the overboard chute is increased and therefore the friction created is increased as well. Constant tension adjustment on the tension machine (T_tensioner) is decreased slightly as the water depth is increased. This is quite strange since the weight of the suspended cable during laying is increased as the water depth is increased and therefore the force required to be provided by the tensioner should have been increased as well to compensate the extra weight of the cable. However, the reason explaining this phenomenon is that due to the increased exit angle, the friction forces created by the contact between cable and overboard chute are increased and this results to less tension requirement by the tension machine to achieve the desired bottom tension. For the sake of installation easiness, the adjustment on the tension machine can be ignored if the water depth variation along the cable route is not so much, since the friction between cable and overboard chute is acting as a natural compensation of the cable suspended weight as the water depth is increased. Minimum bending radius (safety factor during laying) is increased as the bottom tension is increased and there is no upper limit (assuming constant water depth), as described by Equations (2) and (3). It must be reminded here that high bottom tension values increase the safety factor, however, special attention should be paid because this creates cable suspensions along uneven sea floors as a result of the restrained tension created by the friction between seabed and cable. Minimum bending radius (safety factor during laying) is increased as the water depth is increased and remains constant after a specific depth value according to the bottom tension (assuming constant bottom tension). As explained above, for each specific bottom tension value, a critical water depth can be numerically defined for which the minimum bending radius is derived by the submerged part and remains constant for every deeper area than the critical depth.
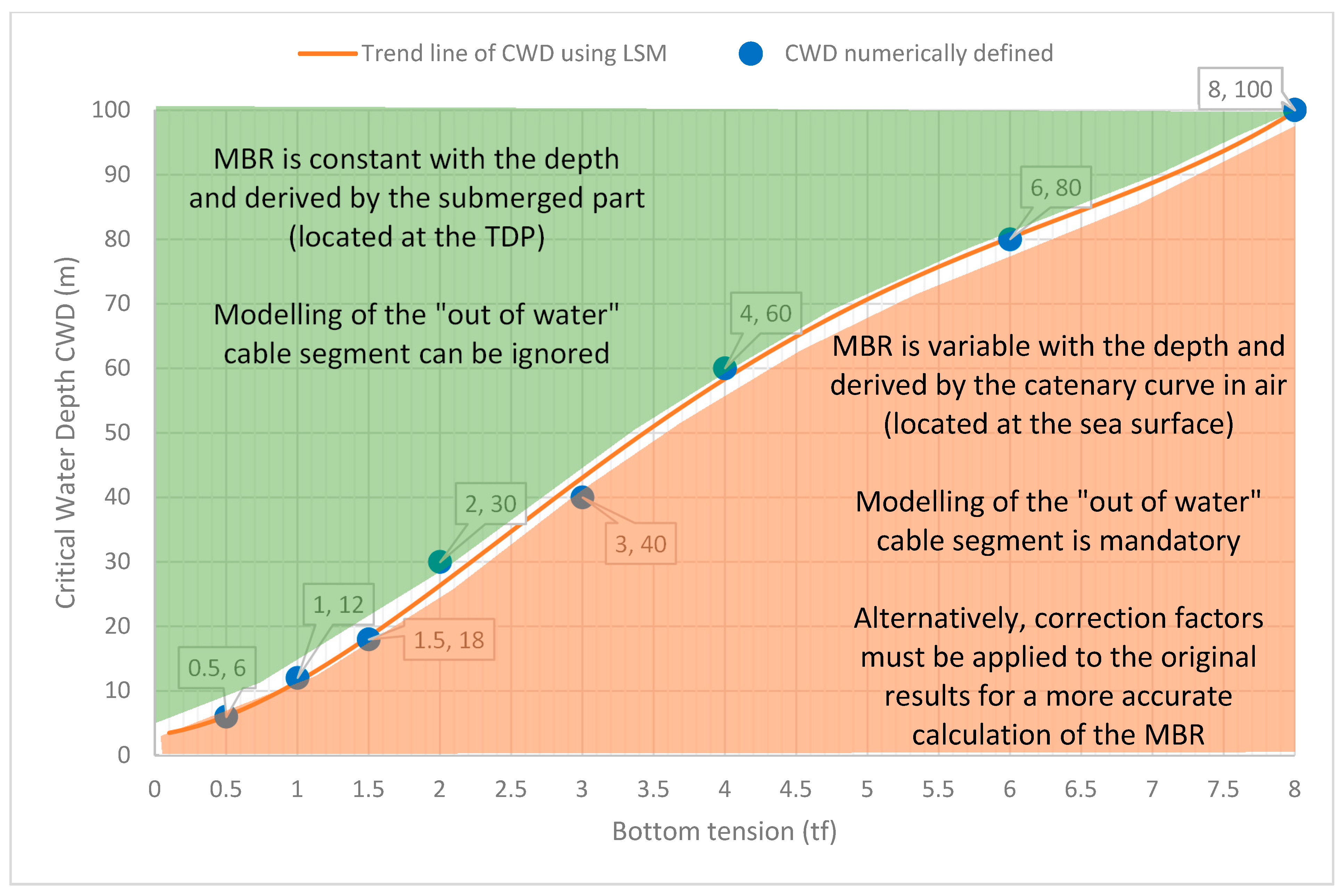
The critical water depth (CWD), numerically defined at the points where the combination of bottom tension and water depth is marked, is presented in
Figure 9 using the blue scatters. The trend line of the CWD is numerically approximated using the least square method (LSM) and presented using the orange line. A fourth-degree polynomial equation is utilized in order to minimize the error of approximation for the numerical expression of the CWD and provided here below.
The
Figure 9 in conjunction with Equation (4) can be used as guidance for all the cable installers in order to determine the cases which are critical for the modelling of the “out of water” cable segment. The combinations of bottom tension (H) and water depth (WD) that are located into the green area at the left-top part of the graph are those in which the MBR is constant as the water depth is further increased and is derived by the submerged part of the catenary curve. For these installation cases, the “out of water” cable segment can be ignored without denoting the accuracy of the MBR calculation. In contrast, the combinations of bottom tension (H) and water depth (WD) that are located into the red area at the right-bottom part of the graph are those in which the MBR is variable as the water depth is further decreased and is derived by the part of catenary curve in air. For these installation cases, the combined catenary curve must be calculated as described in the present paper. Alternatively, the cable installers should apply the correction factors which are proposed in the next section to the original results in order to improve the accuracy of the actual MBR calculation.
3.2. Influence for the Modelling of the “Out of Water” Cable Segment
The effect of the “out of water” cable segment, the part of cable between the sea surface and the cable ship overboard chute, has been investigated especially for shallow water applications. Utilizing the installation curves and the correction factors provided in the present paper, corrections can be conducted when cable responses do not include the “out of water” cable segment.
Evaluation of the influence for the modelling of the cable part in air will be conducted comparing two different case studies (CS). The modelling of the combined catenary curve, assuming “submerged” the part between the touch down point to the sea surface and “in air” the part between the sea surface and the last point touching the overboard chute on the cable lay vessel, is named as CS1. In contrary, the modelling of the submerged catenary curve, assuming “submerged” the whole length of the suspended cable between the touch down point and the last point on the overboard chute, is named as CS2. Both the case studies have been analyzed assuming different water depth values starting from 2 m water depth and ending at 20 m water. Furthermore, as bottom tension input, two different set of 4 runs were conducted assuming as first set the values of 500/1000/1500/2000 kgf and as second set the values of 3000/4000/6000/8000 kgf. The friction force between cable and overboard chute is calculated for both case studies using the capstan equation [
25] and the friction coefficient is assumed equal to μ = 0.5.
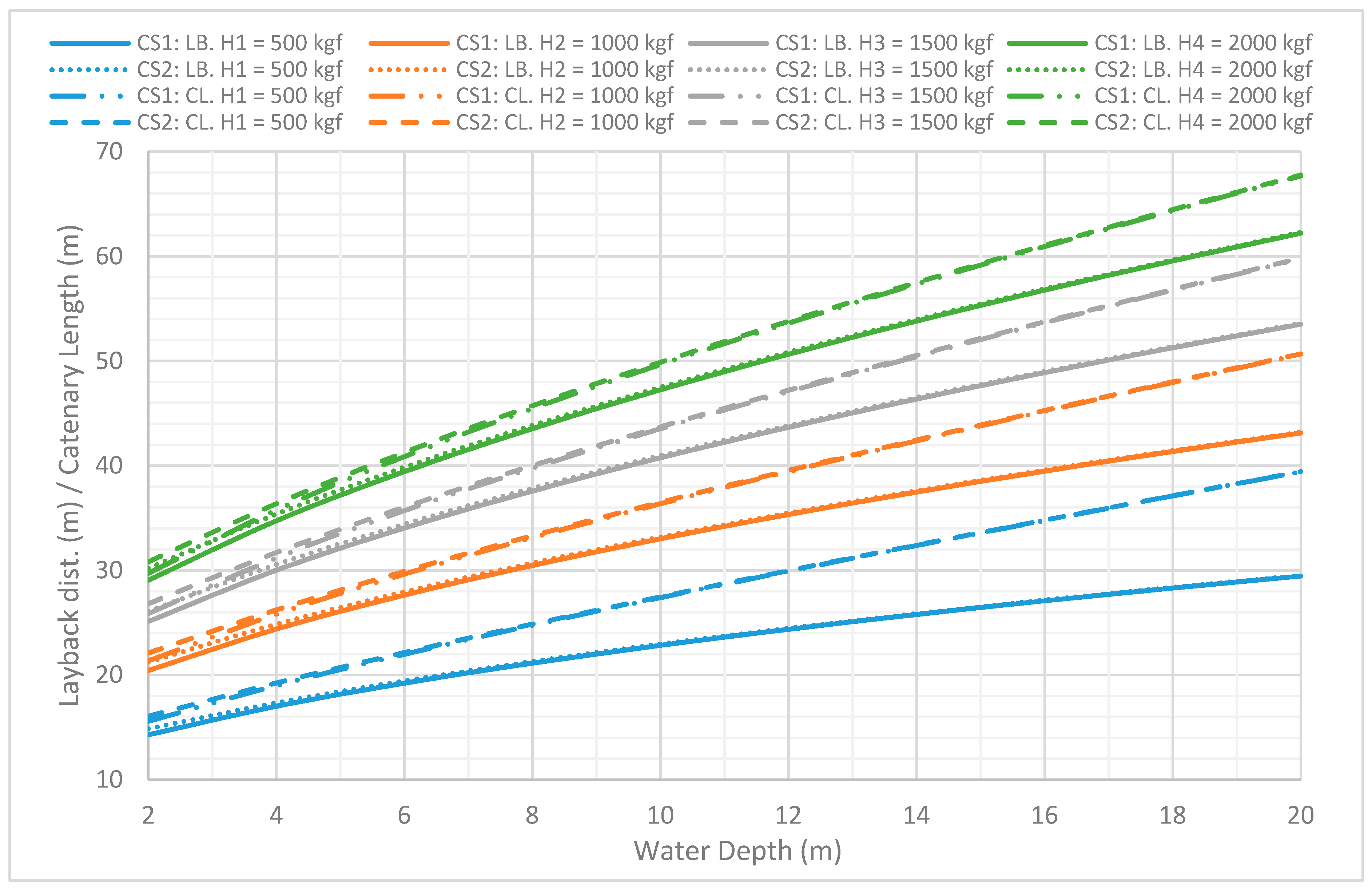
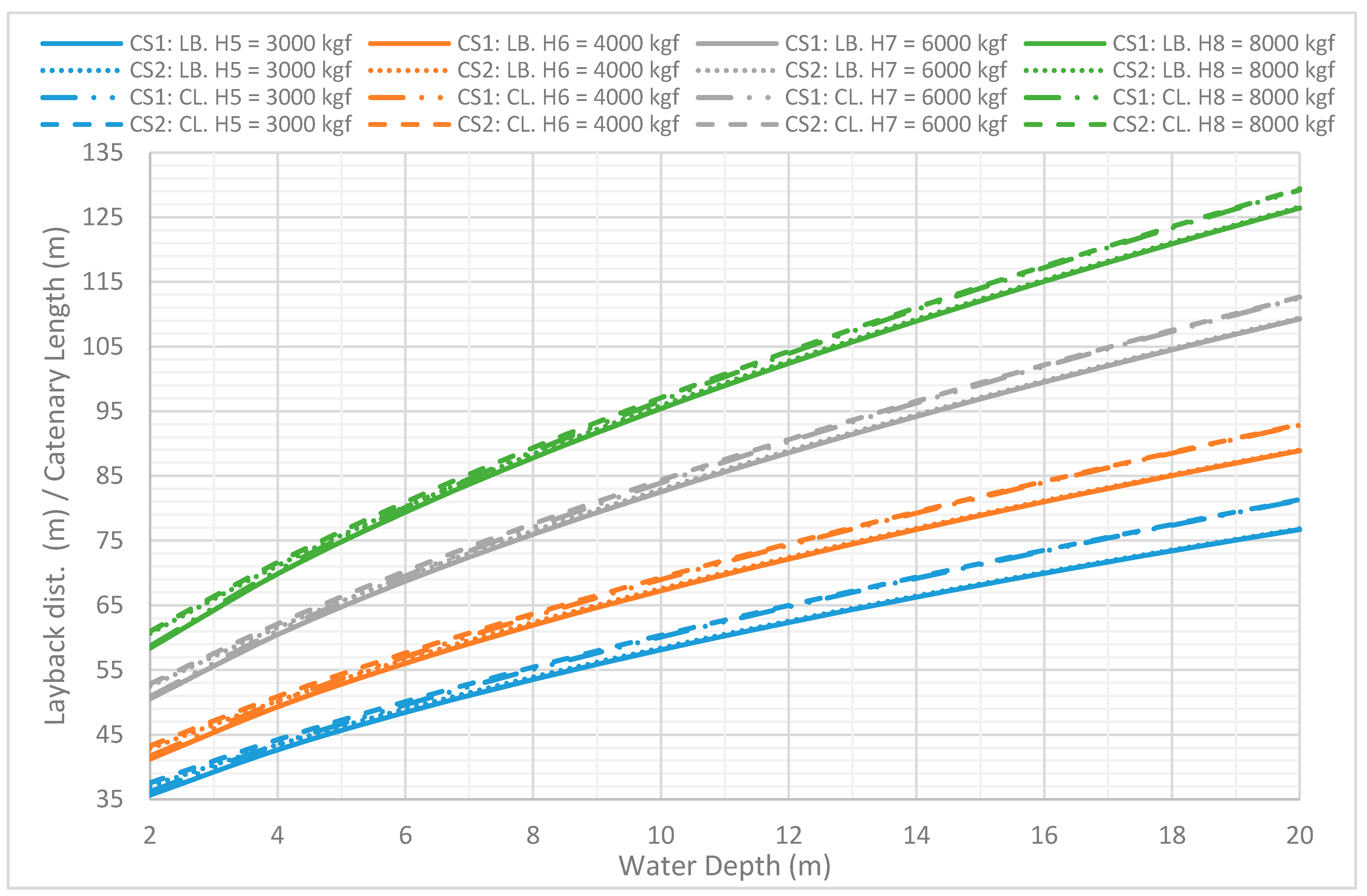
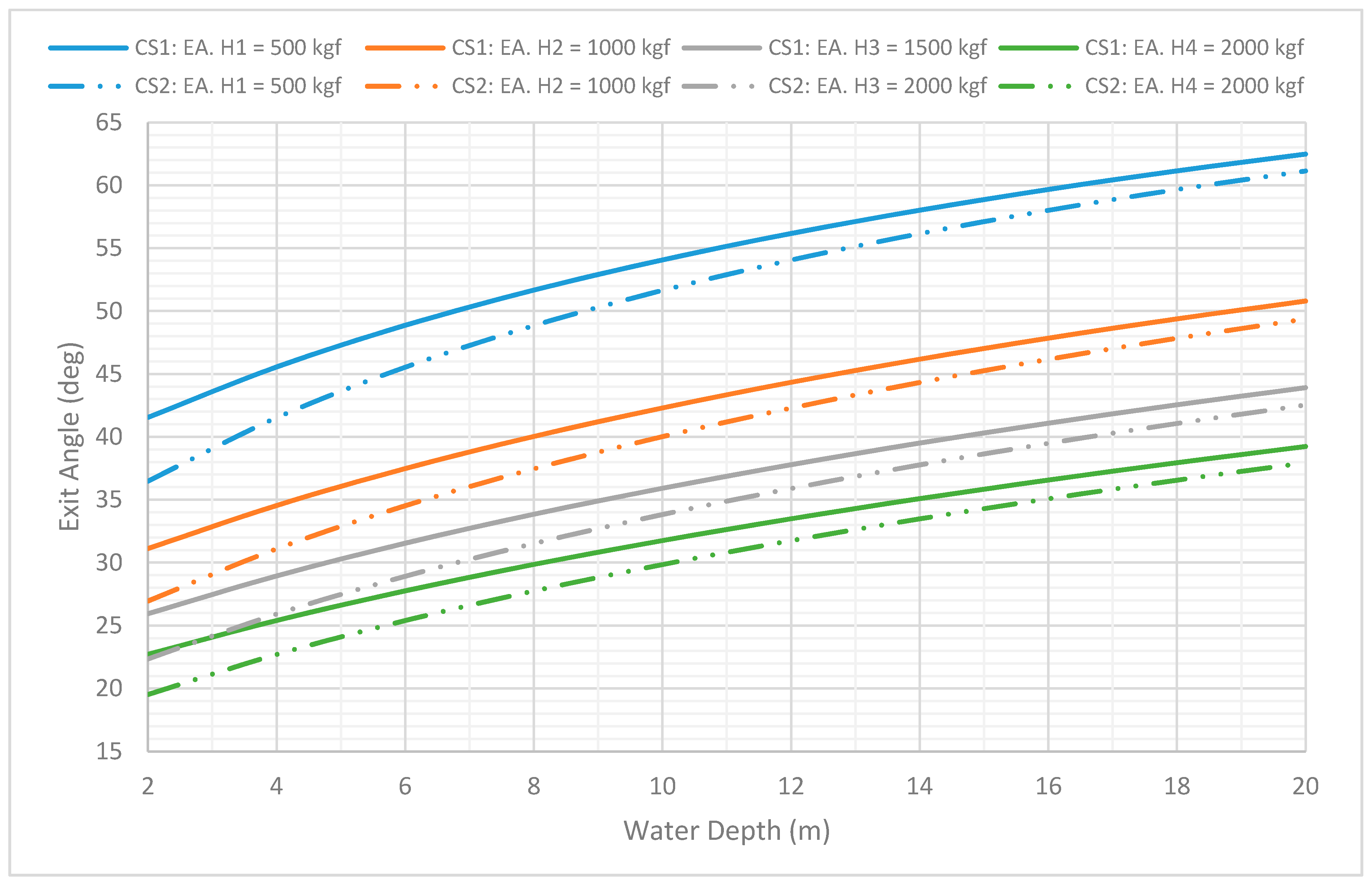
Different cable critical responses during a cable deployment process using various bottom tension values and water depths are illustrated in
Figure 10,
Figure 11,
Figure 12,
Figure 13,
Figure 14 and
Figure 15 for both case studies CS1 and CS2. The layback distance (LB) and catenary length (CL) are presented in
Figure 10 and
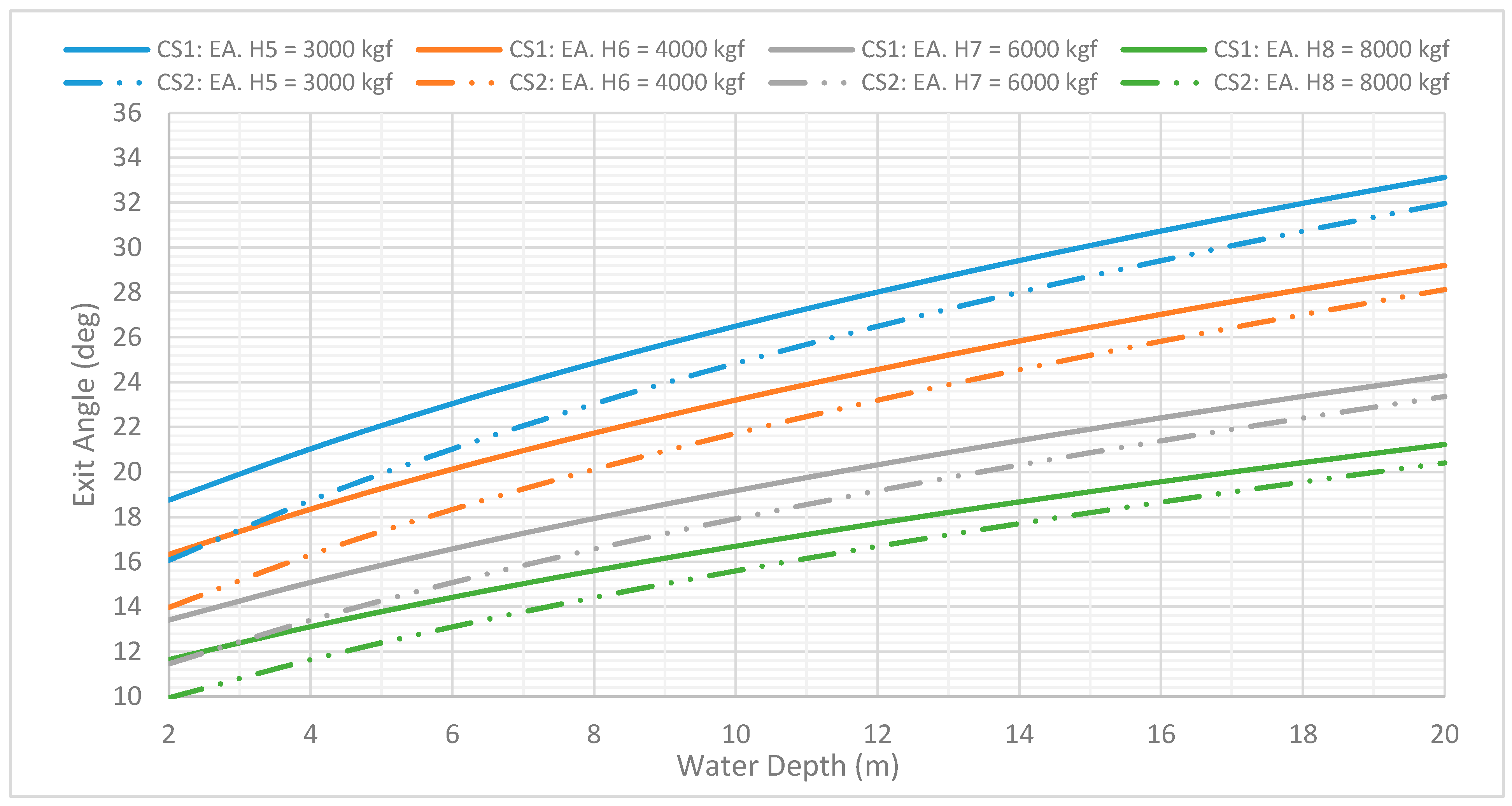
Figure 11 for bottom tensions 500 kgf–2000 kgf and 3000 kgf–8000 kgf, respectively. The exit angle (θ) is presented in
Figure 12 and
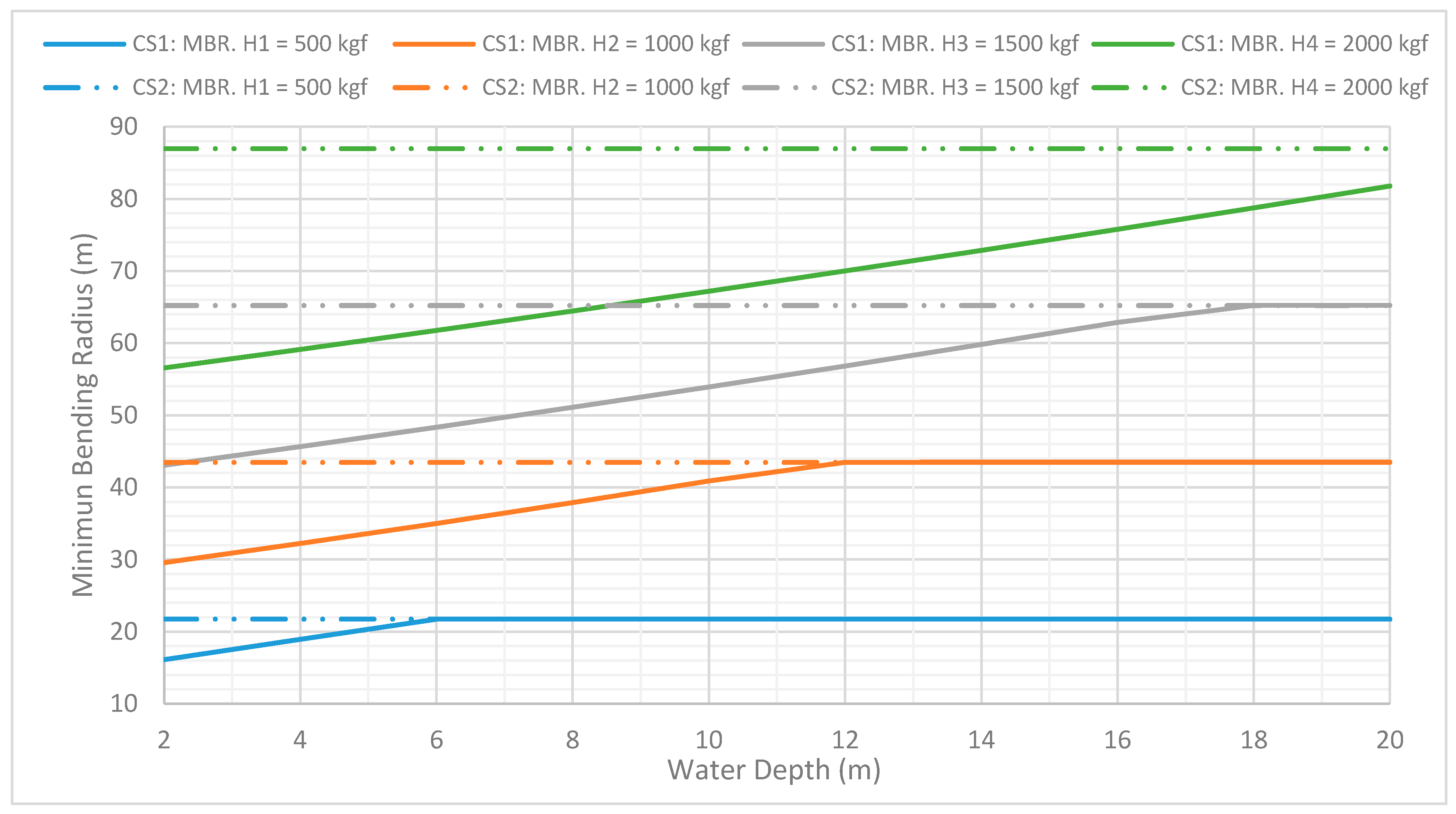
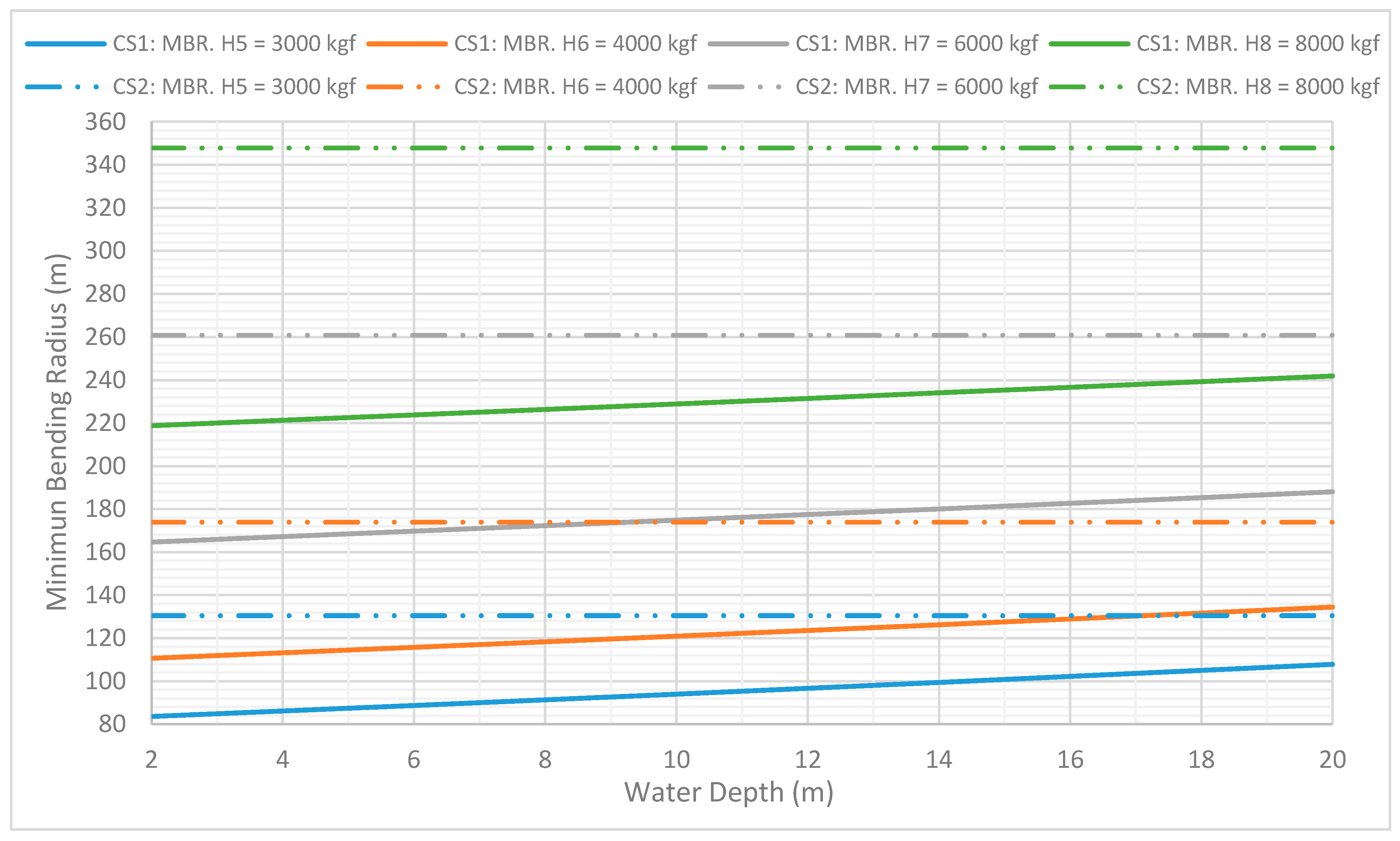
Figure 13 for bottom tensions 500 kgf–2000 kgf and 3000 kgf–8000 kgf, respectively. The minimum bending radius (MBR) is presented in
Figure 14 and
Figure 15 for bottom tensions 500 kgf–2000 kgf and 3000 kgf–8000 kgf, respectively.
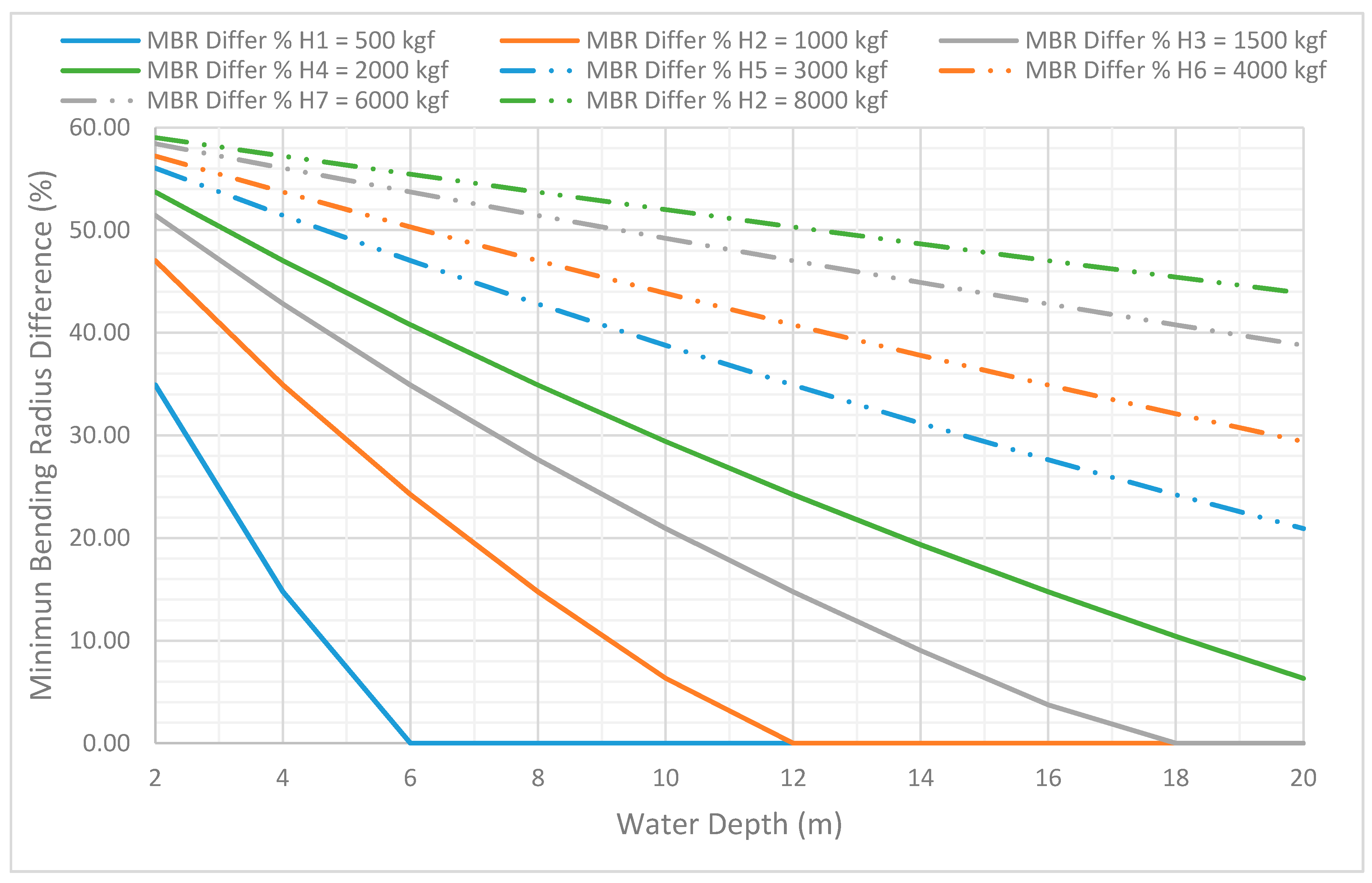
The study presented above for the evaluation of the influence for the modelling of the “out of water” cable segment can be summarized by pointing out the following key rules. Layback distance (LB) is not influenced significantly by the modelling or not of the “out of water” cable segment. The maximum difference between CS1 and CS2 is presented in shallow waters and is equal to 4.15%. The variation of the difference between the two case studies when the bottom tension is varying between 500 kgf–8000 kgf is ignorable and equal to 4.15–3.92% respectively. This difference is decreased as the water depth is increased. Catenary length (CL) is not influenced significantly by the modelling or not of the “out of water” cable segment. The maximum difference is presented in shallow waters and is equal to 3.85%. The variation of the difference between the two case studies when the bottom tension is varying between 500 kgf–8000 kgf is ignorable and equal to 3.16–3.85% respectively. This difference is decreased as the water depth is increased. Cable exit angle (θ) is influenced by the modelling of the “out of water” cable segment. The maximum difference is presented in shallow waters and is equal to 14.63%. The variation of the difference between the two case studies when the bottom tension is varying between 500 kgf–8000 kgf is equal to 12.18–14.63% respectively. This difference is decreased as the water depth is increased. At the maximum water depth (20 m) that the present study was conducted, the difference is almost ignorable and equal to 3.84%. Minimum bending radius (safety factor during cable laying operation) is significantly influenced by the modelling of the “out of water” cable segment as the bottom tension value is increased. As the bottom tension value is increased, the cable exit angle is decreased and the length of the cable segment which is “out of water” is longer, thus the influence of this part is becoming more significant to the system response. The maximum difference is present in shallow water area and is equal to 59.04% at the maximum bottom tension value of 8000 kgf. The variation of the difference between the two case studies when the bottom tension is varying between 500 kgf–8000 kgf is equal to 34.92–59.04% respectively. This difference is decreased as the water depth is increased. At the maximum water depth (20 m) that the present study was conducted, the difference between the two case studies when the bottom tension is varying between 500 kgf–8000 kgf is equal to 0.00–43.85% respectively. It should be noted that for the low values of bottom tension (500 kgf–1500 kgf), there is no difference between the CS1 and CS2 for water depths deeper than the relevant critical water depth. This proves the theory of the critical water depth as presented and described in
Figure 9. Minimum bending radius difference (%) between the two case studies is presented in
Table 4 and illustrated in
Figure 16 because is the most crucial parameter for the cable integrity during the deployment process. It should be noted that the minimum bending radius for the specific subsea cable that is used in this study is much bigger than the minimum allowable recommended by the manufacturer (MBR
actual = 16.11 m >> MBR
min.allowable = 2.2 m) even if the “out of water” cable segment has been taken into consideration. However, the 59% analysis error on the MBR quantification deserves attention to be get for the deployment cases of more sensitive in bending stresses cables and pipelines.
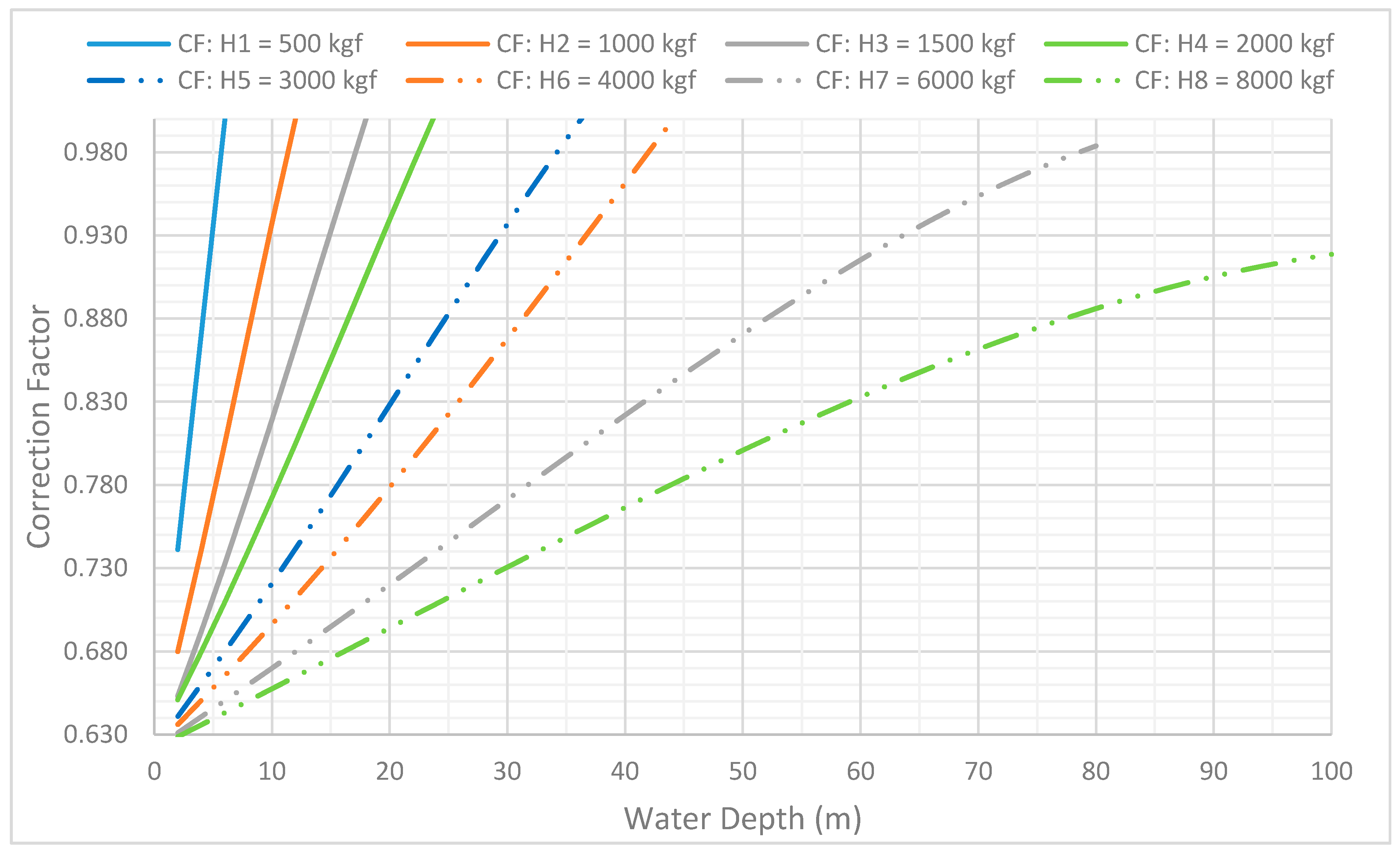
Processing the results of the above presented study, multiplying correction factors (CF) are proposed for various bottom tension (H) and water depth (WD) combinations in order to allow the cable installers to improve the calculation accuracy of the minimum bending radius in case of not modelling the “out of water” cable segment. Analytical expressions of correction factors for different values of bottom tensions (H) are presented here after. Correction factors are valid only for combinations of bottom tension and water depth which are laid into the red area of
Figure 9.
As illustrated in
Figure 17, multiplying correction factors are varying between 0.629 and 1.0. For intermediate values of bottom tension (H), linear interpolation can be applied to estimate the correction factor. For example, a cable laying operation is taken place at a water depth of 10 m with a bottom tension of 2000 kgf. The minimum bending radius calculated by the analysis tool ignoring the “out of water” cable segment is 86.96 m. As per
Figure 17, the corrective factor corresponds to this combination is 0.772. Thus, multiplying the original value of 86.96 m with the corrective factor of 0.772, the corrected value of the MBR is 67.13 m. It should be noted that the relevant value of the MBR analysing the combined catenary curve is 67.19 m. Therefore, even if the cable installers are not able to analyse a combined catenary curve, now they are able to use the proposed correction factors in order to improve the accuracy of the MBR calculation.
3.3. Overboard Cable Chute Friction Modelling Effects
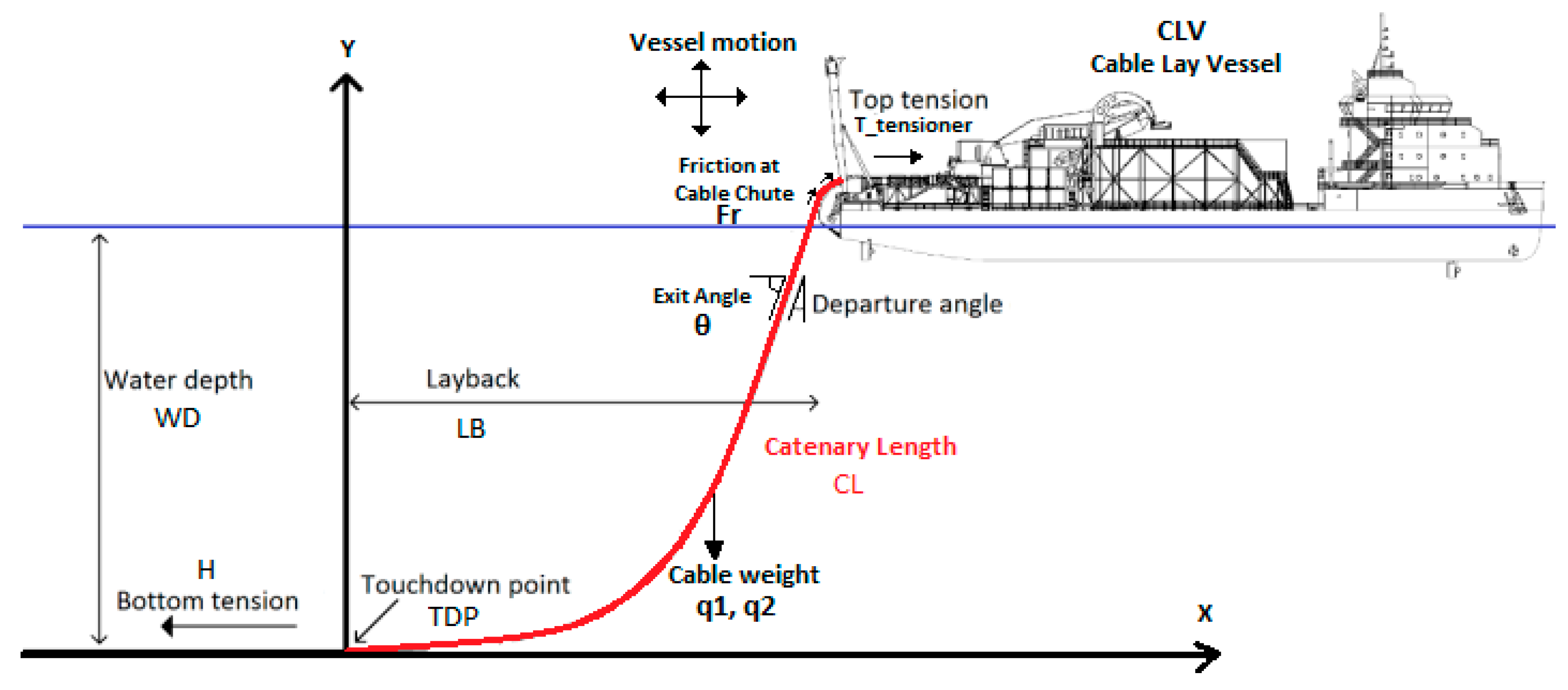
When the submarine cables are laid from the overboard chute of a cable laying vessel, there are the following components that contribute to the axial forces along the submarine cable. Gravity forces by the submarine cable self-weight, buoyancy forces, residual desired bottom tension on the seabed, drag and inertia forces due to the hydrodynamic loads created by currents, waves, and cable ship motions. Thus, as already presented in [
4,
6,
8,
9,
10,
11,
14,
15,
16,
17,
18], practical cable tension at ship “T_tensioner” can be written, after a slight modification to include the “out of water” cable segment, as:
“T_tensioner” is the tension machine adjustment in terms of force units onboard the cable laying vessel. This is the only parameter that can be monitored real time by the cable installers with the common available equipment nowadays in the cable industry. The cable self-weight is expressed as “q1” for the submerged part and as “q2” for the “out of water” cable segment. “WD” is the water depth at the touch down point and “c” is the vertical distance between the sea surface and the last touching point of the cable on the overboard chute. “H” is the desired residual bottom tension of the cable on the seabed. “T_dyn” is the effect of the hydrodynamic loads due to currents, wave, cable ship motions and asynchronization between cable ship velocity and cable pay-out rate on the axial force along the cable. However, there is one more component that is hidden in this equation and can play a major role in the cable laying analysis. This component is the friction force created by the contact between the cable and the overboard chute and can change dramatically the equilibrium of the forces acting on the cable having positive or negative consequences in case of inaccurate modelling. The in-house cable analysis model is further developed using analytical equations for the calculation of the friction force introduced by the contact between cable and chute. Therefore, the equation that is used by the proposed analysis tool and describes the practical cable tension at ship “T_tensioner” has been extended to account for the friction forces on the cable chute as follows:
The “Fr” is the friction forces created by the contact between cable and overboard chute of the cable ship. Sign “+” is valid for the cable recovery operations and sign “−“ is valid for the laying operations. Cable recovery is a critical operation in that tension requirements by the onboard tensioners can be significantly higher than those encountered during installation.
The friction between cable and sliding surface of the overboard chute is mainly due to the tension exerted on both ends of cable, just before the chute by the tensioner and after the chute by the suspended part of cable. The force analysis of cable infinitesimal is about to be described [
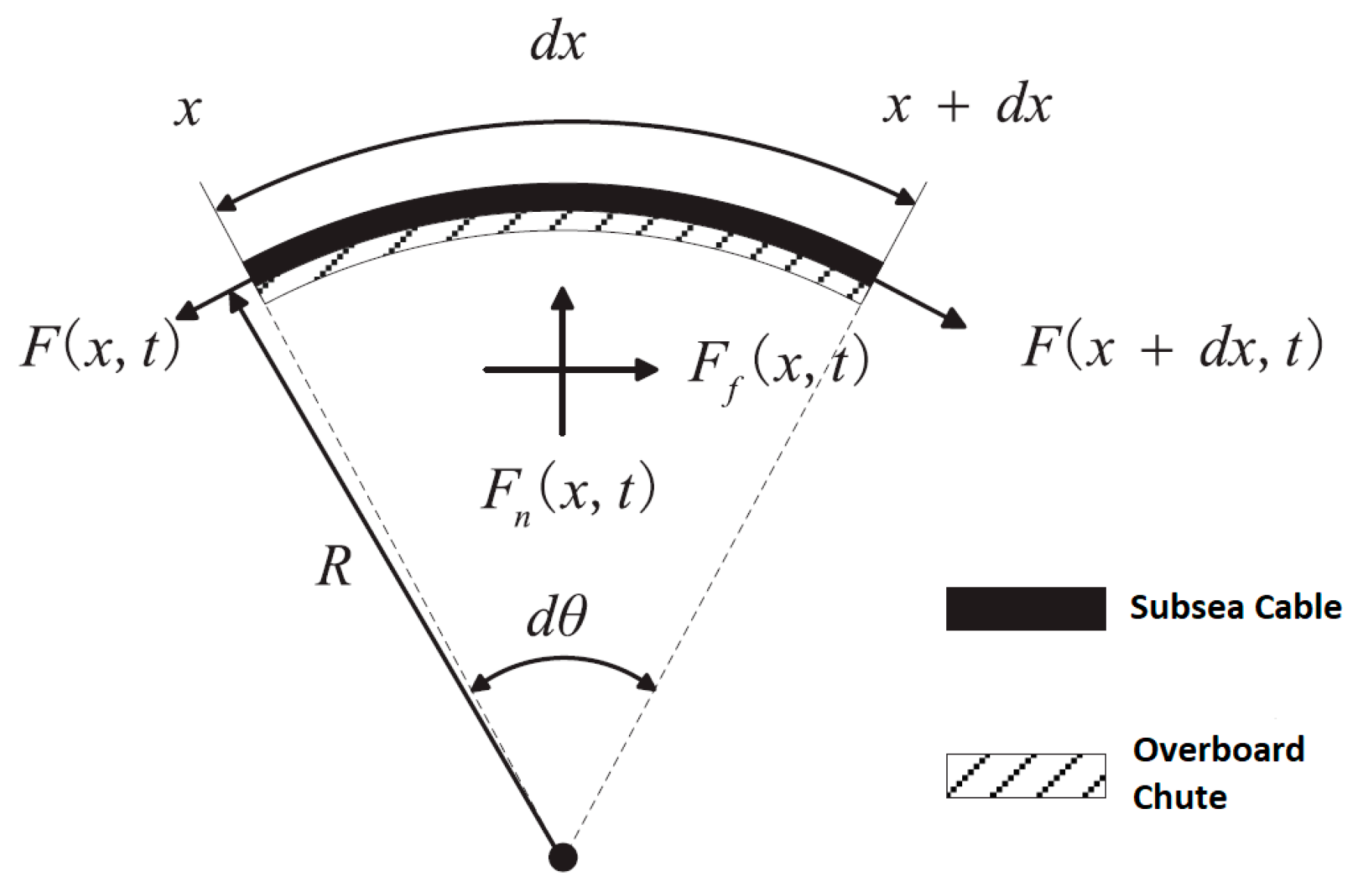
27]. As shown in
Figure 18, the direction of force transferring is left-to-right along the overboard chute sliding surface of the radius R. The relative sliding happens between cable and sliding surface, and the stress analysis of the cable infinitesimal is carried out as follows:
where “dθ” is the wrap angle between the cable infinitesimal element and the sliding surface of the overboard chute, “dx” is the arc length of the cable infinitesimal element, “F(x, t)”, “F(x + dx, t)” are the tension of the cable infinitesimal element initiator and terminal at time t. For typical cable laying activities, initiator is the tensioner side and terminal is the suspended cable side (out of the vessel) and vice versa for a cable recovery operation. “dF(x, t)” is the tension difference between the initiator and the terminal of the cable infinitesimal element at time t, “v” is the cable velocity along the overboard chute, “F
n(x, t)” is the normal support force of the cable from the overboard chute at the time t, and “F
f(x, t)” is the Coulomb friction resulting from the relative motion between the cable and the sliding chute at the time t. Therefore, the friction model for the calculation of the friction force created by the contact between cable and overboard chute can be expressed as:
where “θ” is the wrap angle between the cable and the sliding surface of the overboard chute, “μ” is the friction coefficient, “F(0, t)” is the tension of cable initiator at time t, “F(x, t)” is the cable tension at the x away from the initiator at time t, sign(v) is the sign of the cable velocity for which the sign “−“ is assumed for typical cable laying activities and sign “+” for cable recovery activities and “Fr” is the tension difference between initiator and terminal which is inserted as the friction component in Equation (7). From Equation (9a) is proven that the friction between cable and the overboard chute just depends on the friction coefficient “μ” and the wrap angle “θ” and is irrelevant to the routing radius “R” of the cable along the sliding surface of the cable chute or the area of contact.
The friction model presented above has been incorporated in the custom-made cable analysis tool [
24] and the extended Equation (7), proposed in the present paper, is adopted for the calculation of the cable tension at ship (T_tensioner). A brief presentation of the core equations is provided to explain how the proposed friction model has been accounted for in the in-house analysis tool. Further details about the full numerical model can been found in the reference paper [
24].
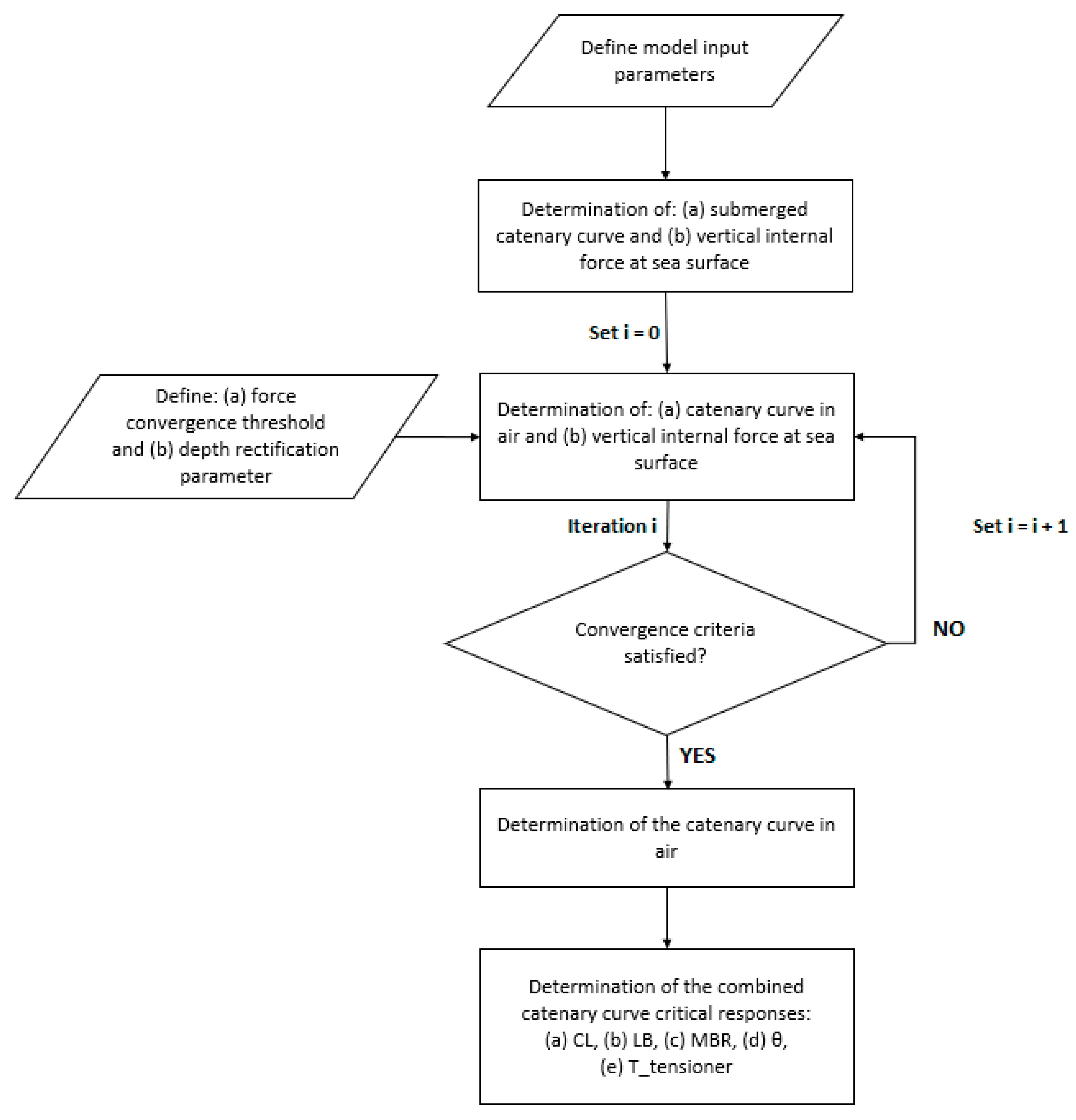
Initially, the submerged catenary curve will be determined using Equation (10). For y = y1 =WD and q = q1, x1 can be calculated assuming a desired bottom tension H.
For x = x1, the vertical component of the internal force V′ at the dummy node located at the sea surface can be determined using Equation (11).
The iterative procedure to define the catenary curve in air, will follow. For the first iteration, we set y = y2 = WD and q = q2, and then x2 is determined using Equation (10) and V″ using Equation (11). The iterative procedure will continue until V″ is almost equal to V′, assuming a difference less than the force convergence threshold as defined by the user. At each iteration, the y is rectified by the depth rectification factor until the convergence has been achieved. At the end of the iterative procedure, the x2 and y2 parameters of the catenary curve in air have been determined.
For y = y2 + c and q = q2, x2′ can be defined using Equation (10). For x = x2′, q = q2 and H
out = H, the vertical force component V
out at the exit point of the overboard chute can be calculated using Equation (12).
The tangential cable internal force at the overboard chute exit point can be calculated using Equation (13) and the exit angle θ using Equation (14).
Therefore, Equation (9b) can be transformed into Equation (15) in order to be integrated into the in-house analysis tool’s numerical formulation.
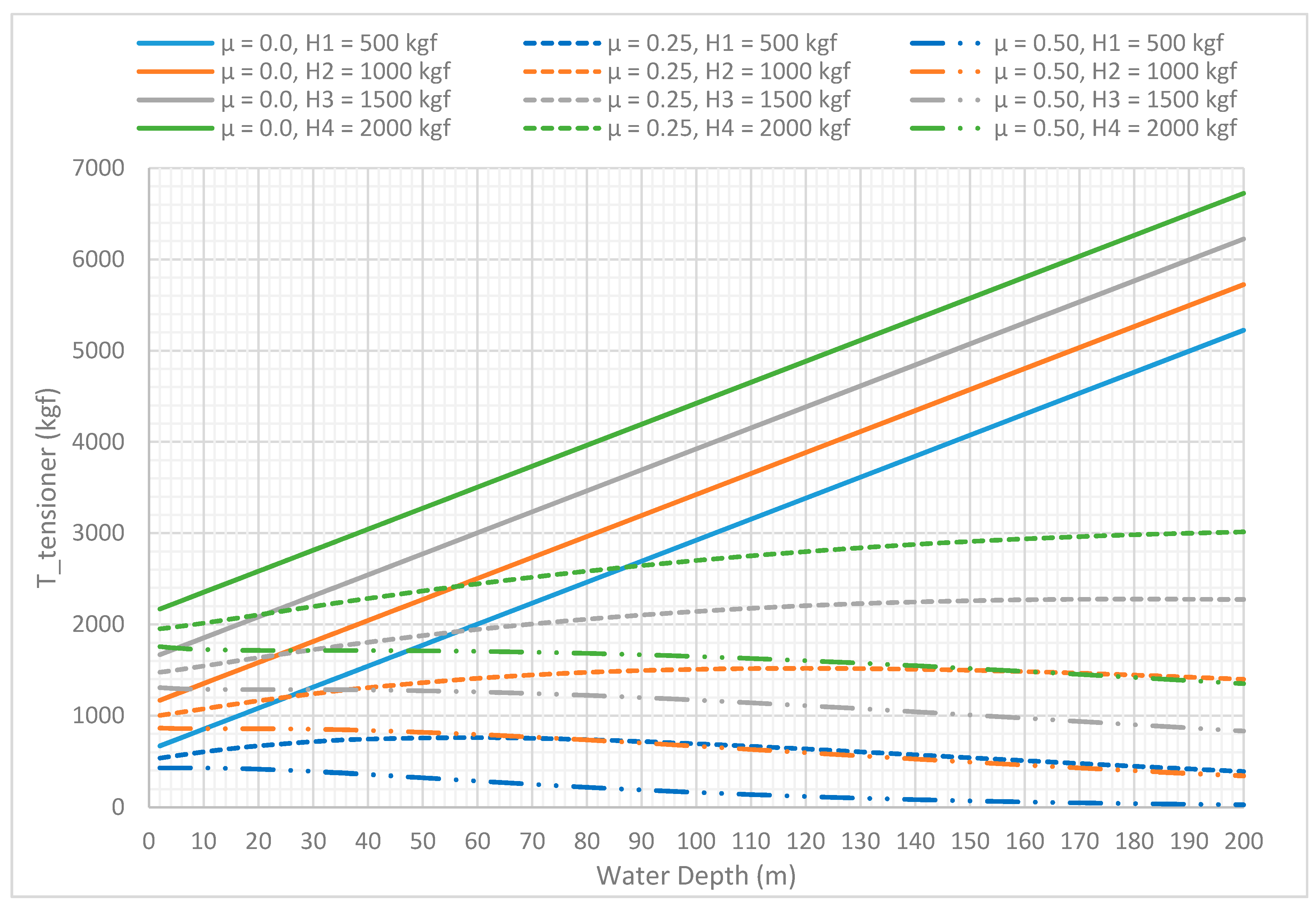
Evaluation of the cable chute friction modelling effects will be conducted analysing cable deployment cases using different friction coefficient values. Initially, three different values of the friction coefficient will be considered (μ = 0.0—μ = 0.25—μ = 0.50) analysing cases at various water depths (between 2 m and 200 m) and different desired bottom tensions (between 500 kgf and 8000 kgf).
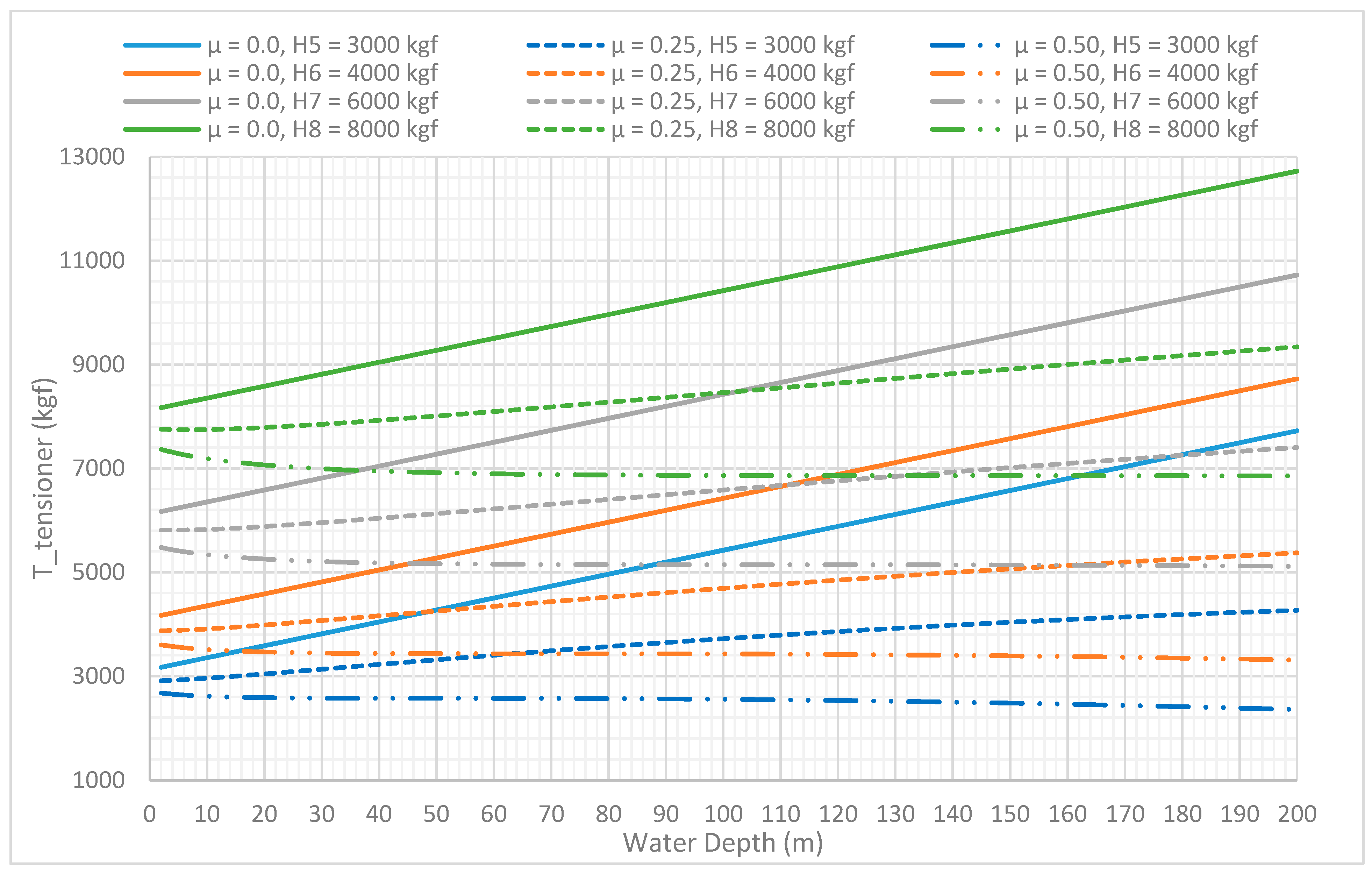
Figure 19 presents the variance of the cable tension at ship (T_tensioner) assuming various water depths for the bottom tension values of 500/1000/1500/2000 kgf. Similarly,
Figure 20 presents the relevant variance of the cable tension ship for the bottom tension values of 3000/4000/6000/8000 kgf.
As illustrated in the above figures, the cable tension at ship (T_tensioner) is dramatically affected by the friction force created between cable and the sliding surface of the overboard chute. It should be noted that in case of no present friction on the overboard chute (cable chute with low friction rollers), the tension machine should be adjusted continuously as the water depth is varying in order to achieve an almost constant bottom tension along the cable route. In case that the friction is present (cable chute with sliding surface), the tension machine adjustment depends on the friction coefficient that has been assumed. It is observed that if the friction coefficient is equal to 0.50, as the water depth is increased and the exit angle (equal to wrap angle) is increased as well, the tension machine adjustment has a gently descending trend. In contradiction, if the friction coefficient is equal to 0.25, the tension machine adjustment has a gently ascending trend as the water depth is increased. Therefore, there is a friction coefficient between the value 0.25 and 0.50 where the friction can be used as a natural tension compensator for a cable laying process without adjusting the tension machine during laying as the water depth is increased or decreased. This observation can be further developed proposing cable chutes with specific friction in order to minimize the tensioner capacities for a cable laying operation. Special attention should be paid that the friction can be used advantageously during a typical laying process, however during a cable recovery operation the friction requires extra force to be exerted by the tensioner in order to retrieve the cable from the seabed.
Figure 21 presents typical cable chutes from the cable industry, left side with rollers to eliminate the friction and right side with a steel sliding surface where the scratches created by the friction are easily visible.
Nowadays, the cable installers during a cable deployment process use the real time force monitoring capability provided by the load cells of the typical caterpillar or wheel tension machines onboard in order to estimate the cable configuration and the bottom tension on the sea floor. As presented above, the cable tension at ship which is the force value recorded by the tension machine is affected by the actual friction force created by the contact between cable and the overboard chute. Therefore, an error of the friction coefficient estimation by the cable installer can cause to serious misleading results exported by the cable analysis tools that can put in danger the cable integrity. Two case studies will be conducted in order to present the possible analysis error that can be created by assuming a wrong friction coefficient. In the first study, CS1, the cable installer assumes that the friction coefficient at the overboard chute is equal to 0.50 and in order to achieve a desired bottom tension of 3000 kgf at four different water depths 10/50/100/200 m, the tension machine must be adjusted as per the values provided by the analysis tool.
Table 5 presents the critical cable responses for a friction coefficient 0.50.
Table 6 and
Table 7 present how the critical responses can be affected in case of having a different friction coefficient (μ = 0.0 and μ = 0.25 respectively) from what initially assumed while maintaining the original tension machine adjustment. As it can be observed, the results prove that the friction can affect drastically the cable configuration and can lead even to a possible cable damage due to buckling or loop formation.
It is obvious that the critical responses of the cable during laying are completely different of what is the cable installer’s understanding due to the wrong estimation of the friction between cable and overboard chute. Special attention should be paid because the cable tension at ship (T_tensioner) is the same for all cases and the cable installer assumes that the cable configuration below the sea surface is exactly what the analysis tool exported. Furthermore, it is observed that the error has an ascending trend as the water depth is increased. Generally, assuming a higher friction coefficient than it is in practice has a result of a lower bottom tension on the seabed and a steeper cable configuration. The wrong estimation of the friction coefficient can lead from an inability to follow a prescribed trajectory on seabed especially along curved routes due to the major error of the layback distance up to a cable failure/damage during the deployment process as presented in
Table 6.
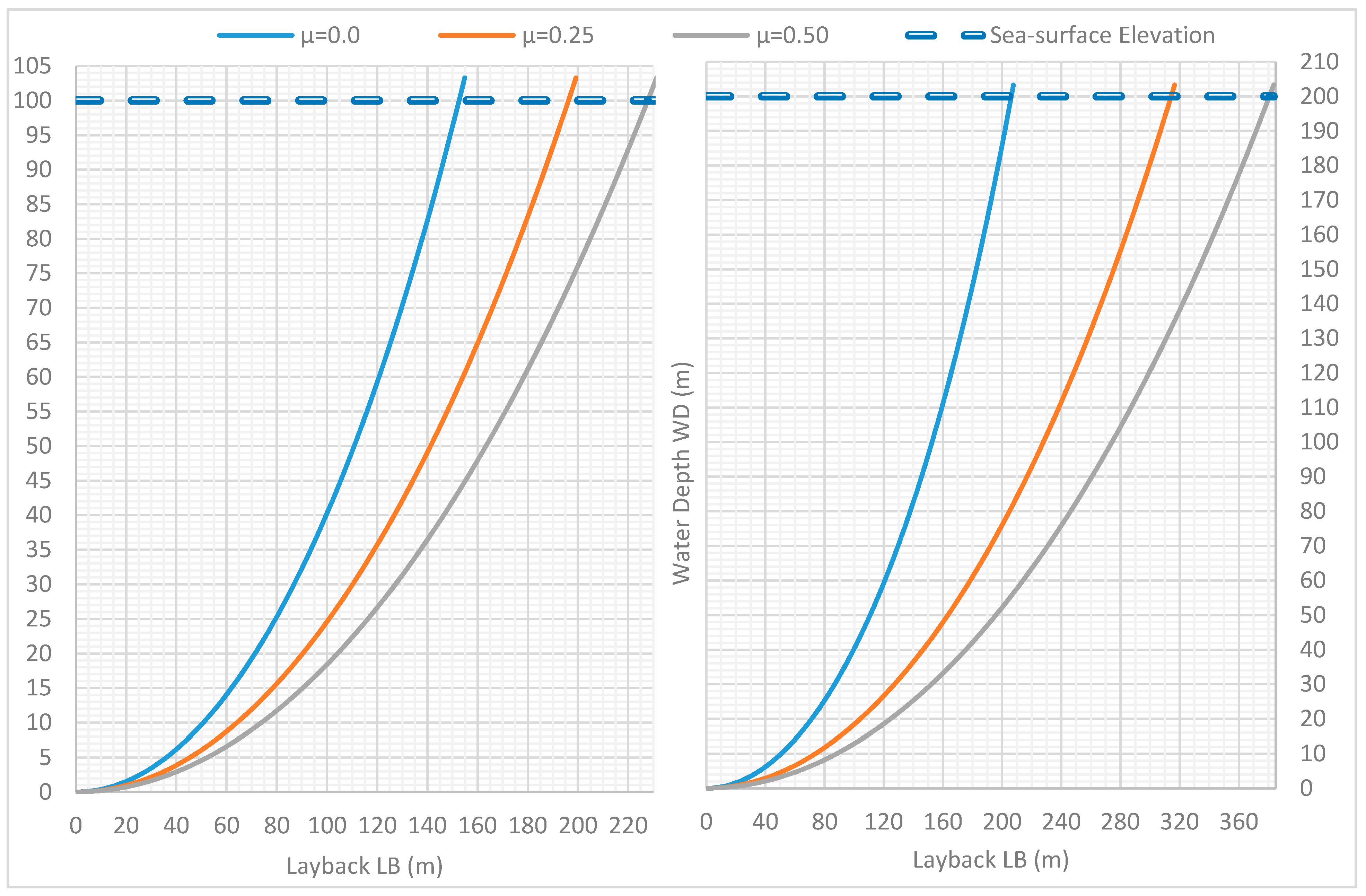
Figure 22 and
Figure 23 present how the cable configuration can be affected due to the different value of the friction coefficient at various water depths 10/50 m and 100/200 m, respectively. At each figure, the blue line is the cable configuration as per the cable installer’s understanding assuming that the friction coefficient is 0.50. However, grey and orange lines are the real practice due to the actual friction coefficient. It should be noted that in
Figure 23, at 200 m water depth, the orange line that represents the case with no friction between cable and overboard chute is not illustrated due to the cable damage caused by the compression force at the TDP.
In the second study, CS2, the cable installer assumes that there is no friction between cable and overboard chute and in order to achieve a desired bottom tension of 3000 kgf at four different water depths 10/50/100/200 m, the tension machine must be adjusted as per the values provided by the analysis tool.
Table 8 presents the critical cable responses for a friction coefficient 0.0.
Table 9 and
Table 10 present how the critical responses can be affected in case of having a different friction coefficient (μ = 0.25 and μ = 0.50 respectively) from what initially assumed while maintaining the original tension machine adjustment. As it can be observed, the results prove again that the friction can affect drastically the cable configuration and can lead even to a possible cable damage due to high tensile forces.
It is clear that the critical responses of the cable during laying are completely different of what is the cable installer’s understanding due to the wrong estimation of the friction between cable and overboard chute. Similar to the CS1, it is observed that the error has an ascending trend as the water depth is increased. Generally, assuming a lower friction coefficient than it is in practice has a result of a higher bottom tension on the seabed and a smoother cable configuration. This may increase the minimum bending radius; however, the high tensile forces can damage the more sensitive fiber optic cables. The wrong estimation of the friction coefficient can lead from an inability to follow a prescribed trajectory on seabed especially along curved routes due to the major error of the layback distance up to a cable failure/damage during the deployment process due to the high tensile forces.
Figure 24 and
Figure 25 present how the cable configuration can be affected due to the different value of the friction coefficient at various water depths 10/50 m and 100/200 m, respectively. At each figure, the blue line is the cable configuration as per the cable installer’s understanding assuming that there is no friction between cable and overboard chute. However, grey and orange lines are the real practice due to the actual friction which is present.
Both of the examined cases that presented above highlight the importance for the correct estimation of the friction coefficient (μ) required for the accurate calculation of the friction force created by the contact between cable and the overboard chute since this force does affect significantly the critical cable responses. An experimental configuration is proposed for the cable installers in order to verify the actual friction force component which is created on the overboard chute assuming various cable exit angles. Once the friction coefficient has been experimentally defined, the proposed custom-made analysis tool can be utilized in order to predict accurately the cable configuration.

 ,
, 

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}