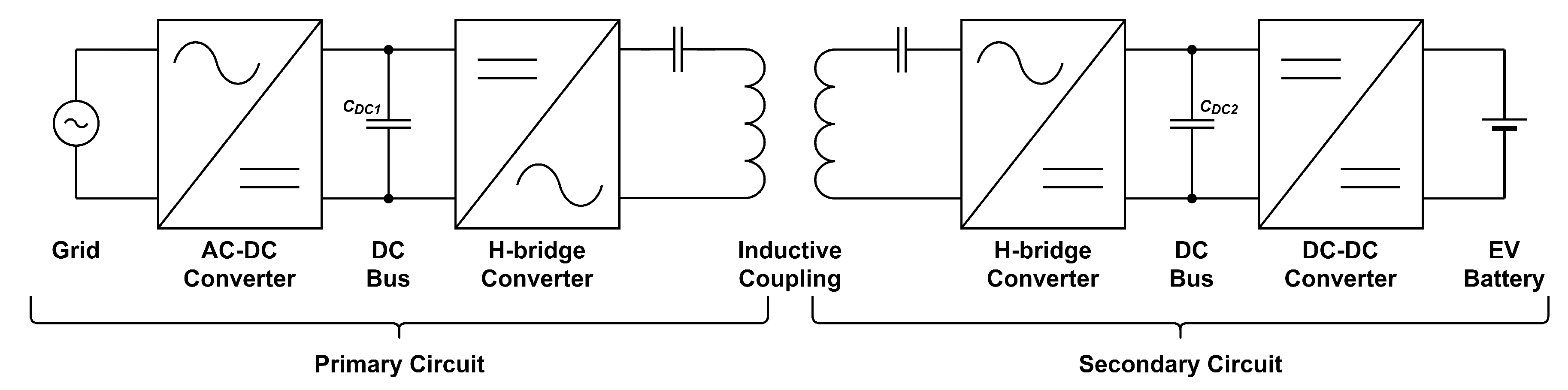
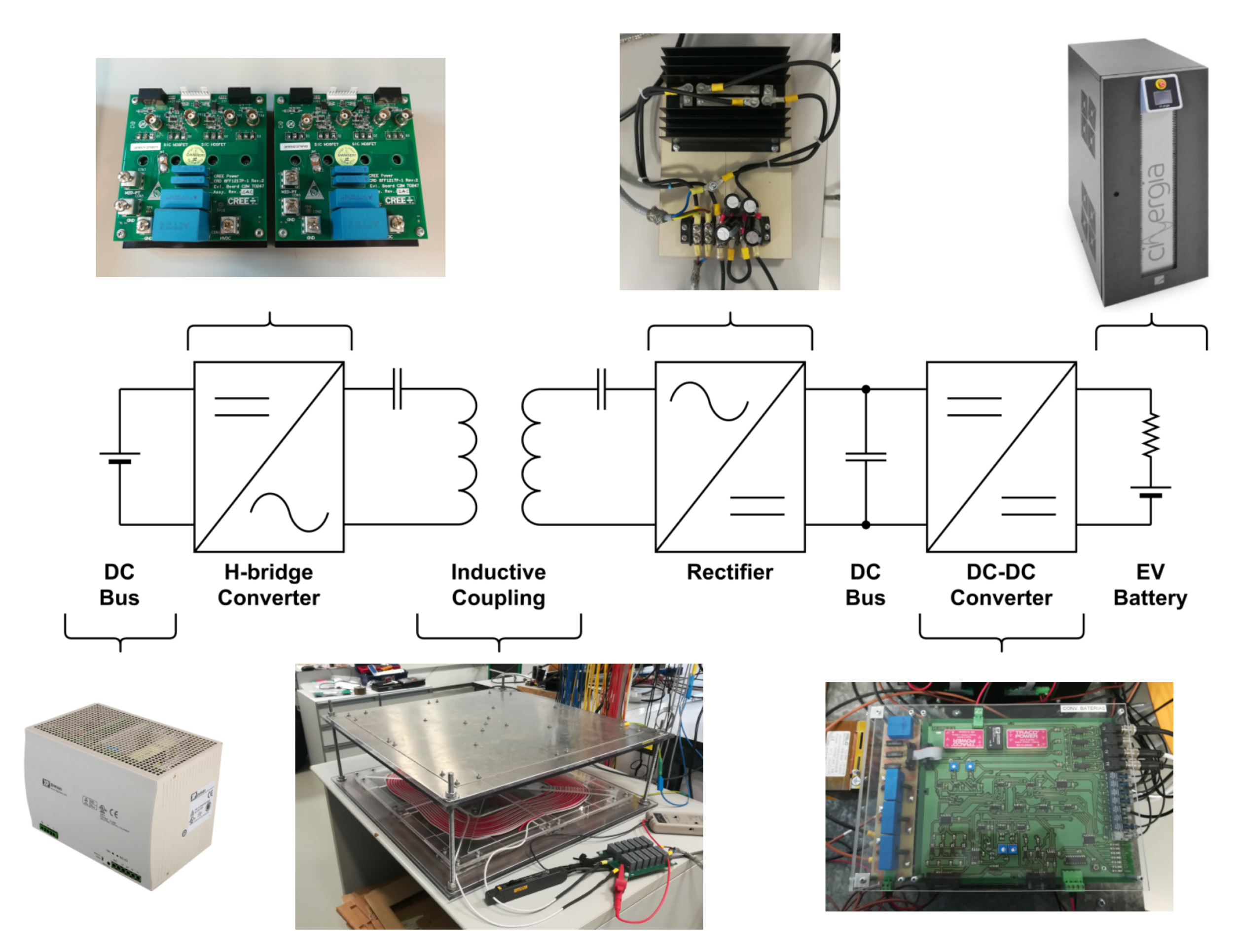
The system of
Figure 1 connected to an electrical grid of 400 V, 50 Hz has been simulated using PSCAD
TM/EMTDC
TM. The control design of the grid-connected AC-DC converter has been carried out in accordance with [
29] and the input DC voltage
of the H-bridge converter associated with the primary side is set to 600 V. The switching frequency of the H-bridge converters associated with the IPT system is set to
kHz, i.e.,
rad/s: This value is in the range established by the SAE J2954 standard [
36]. The main parameters of the SS compensation system are summarized in
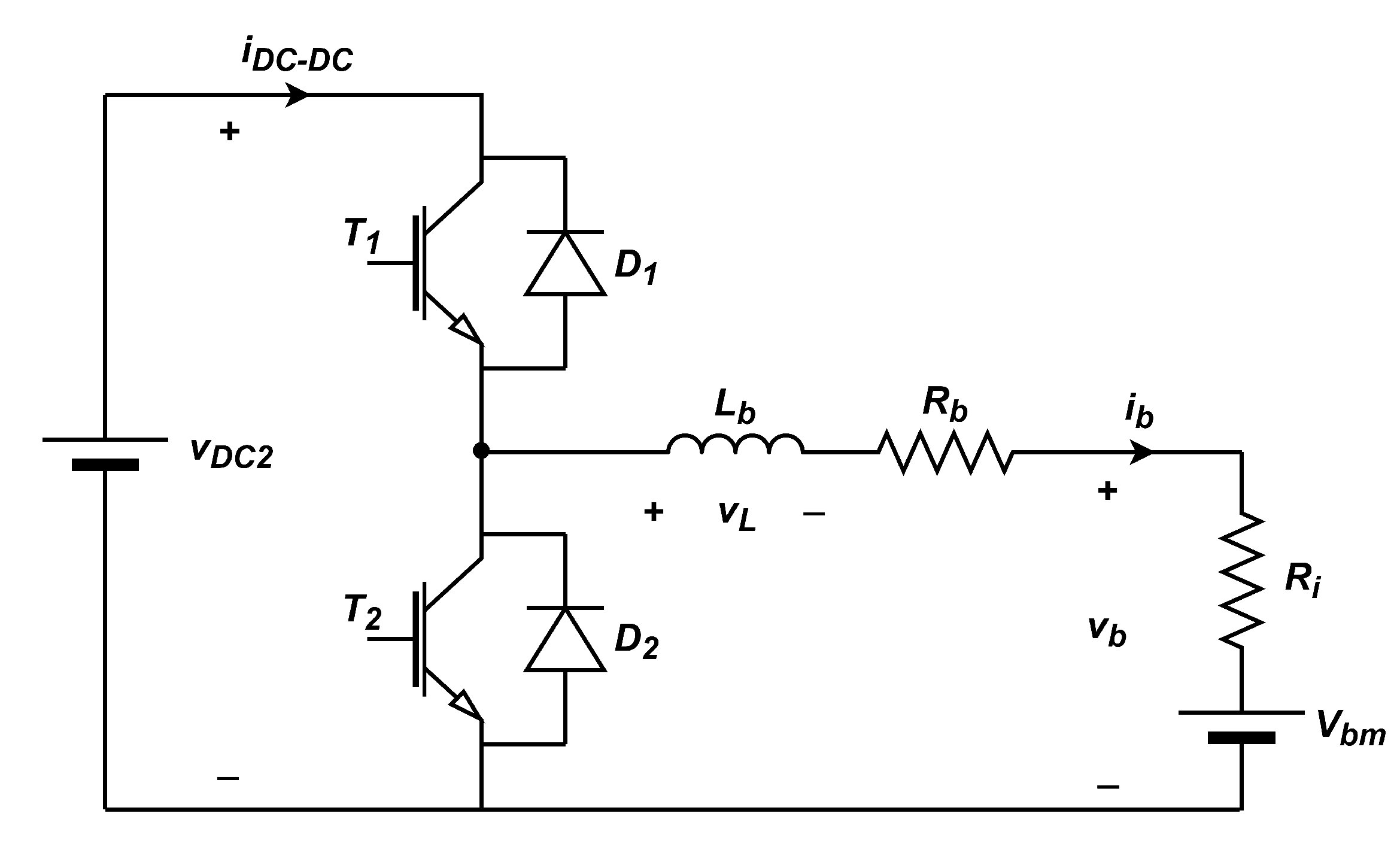
Table 3. The switching frequency of the DC–DC step-down converter is chosen as 15 kHz, while the electromotive force and the internal series resistance of the battery are
V and
, respectively. The parameters of the control systems that regulate the DC voltage
and the current of the battery
are those obtained in the example explained in
Section 4.3.
In order to test the performance of the designed control system, both the G2V mode and the V2G mode are simulated.
5.1. Simulation Results Obtained in the G2V Mode
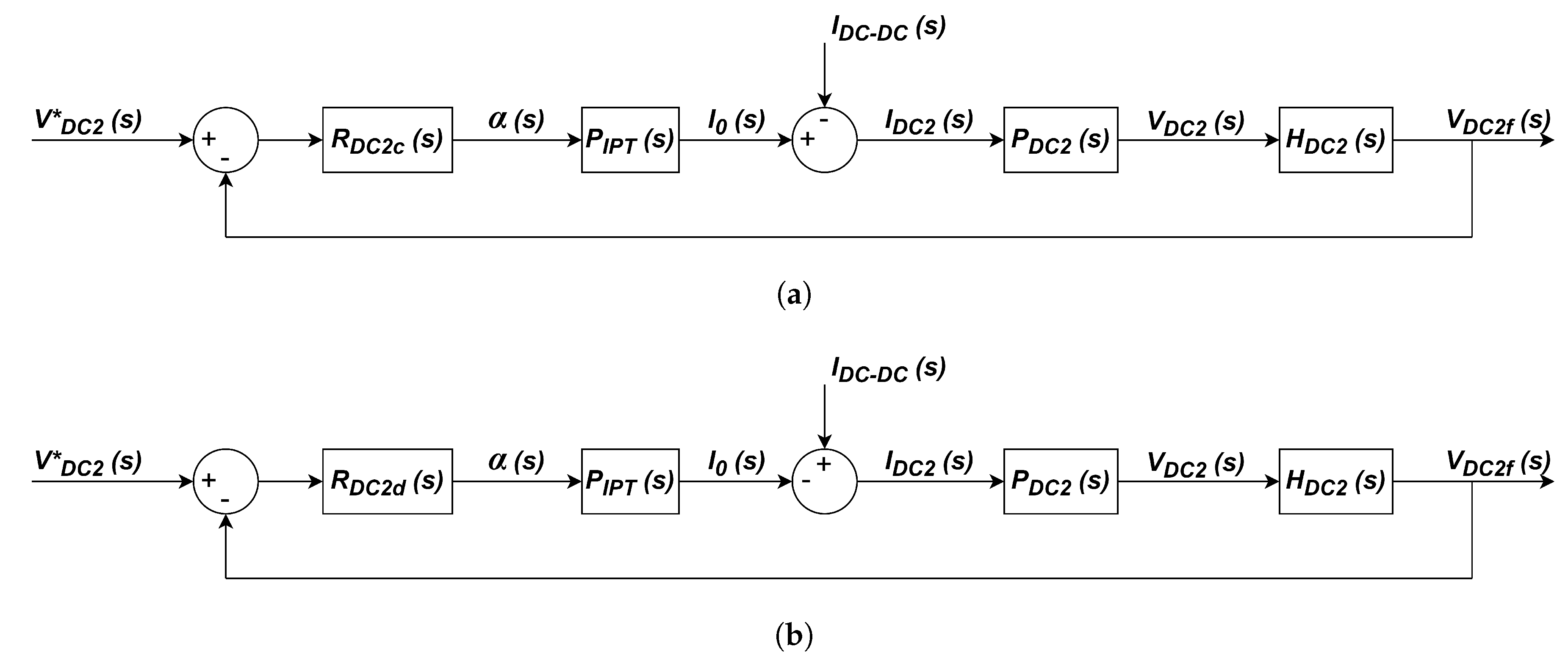
When the simulation test starts, both the control scheme of the DC voltage
and the control system of the battery current
are connected: The reference input for the voltage
is set to 350 V, which is kept constant during the complete simulation time, and only the control scheme plotted in
Figure 8a with the regulator
is working. The value of the reference input for the battery current is changed as shown in
Table 4. The total simulation time is 2.4 s.
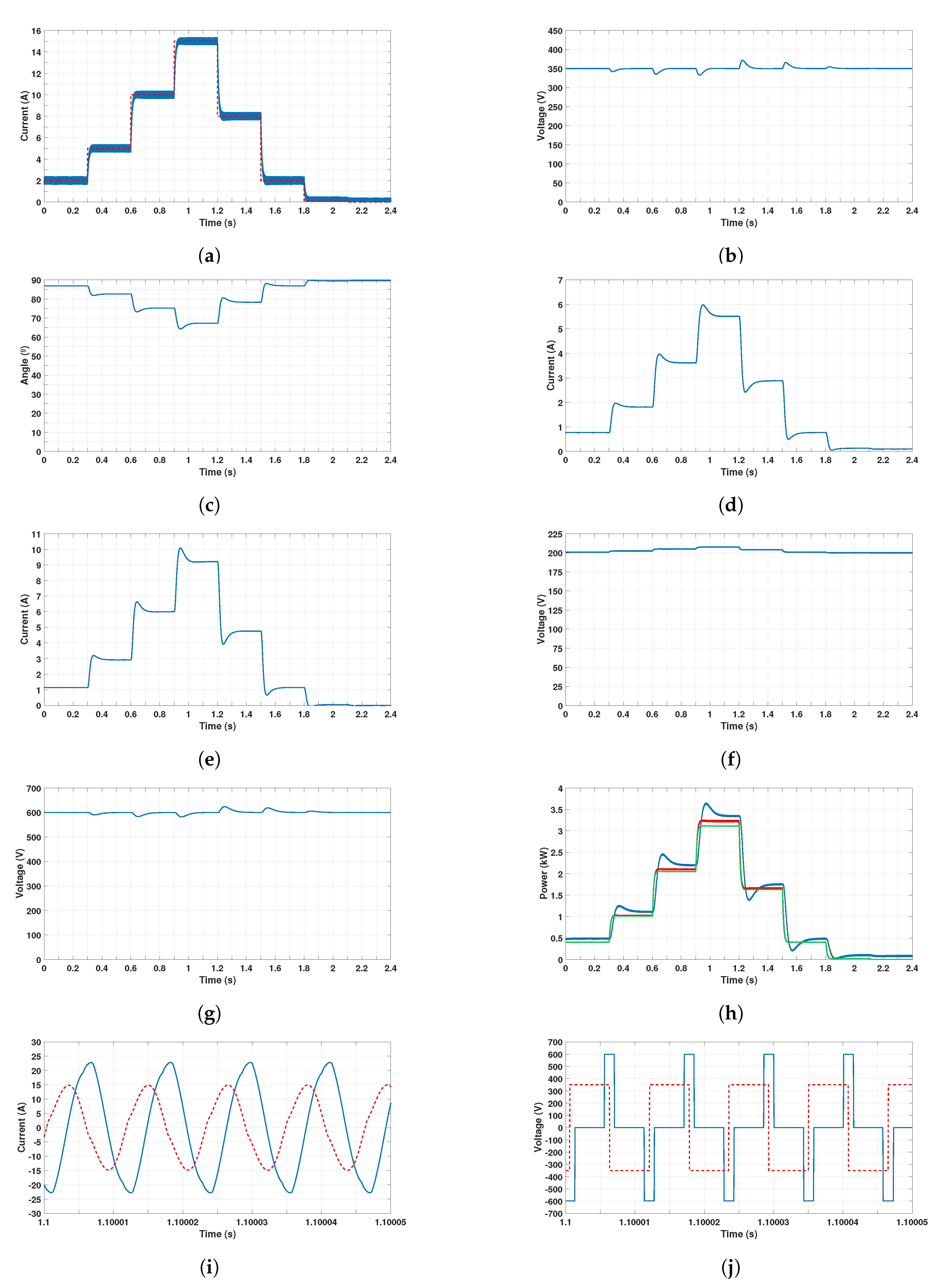
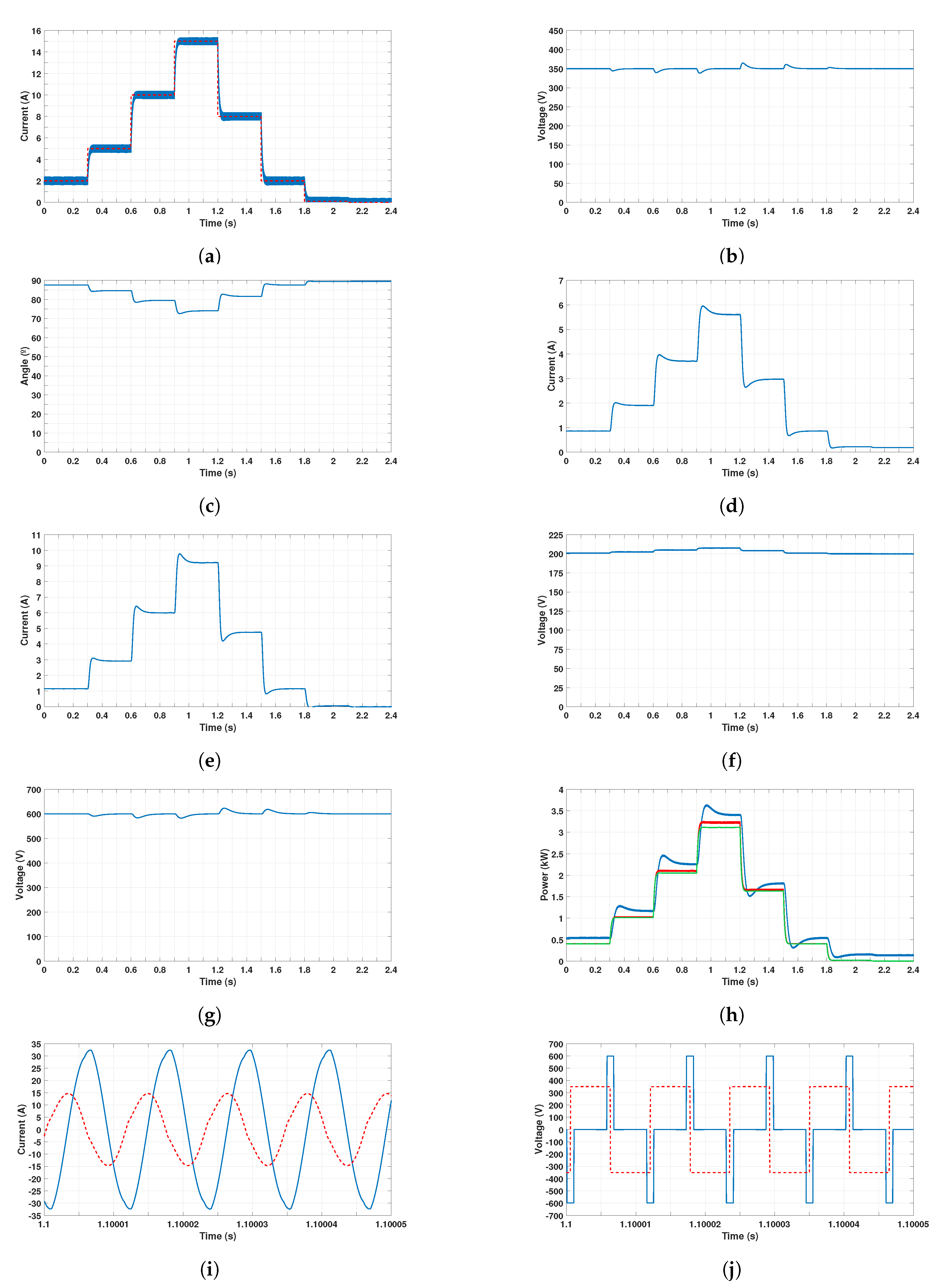
The obtained results are plotted in
Figure 12.
Figure 12a plots the time response of the current
together with its reference: The steady state is reached within a maximum of 28 ms, without overshoot, and the tracking error is zero. For time instants,
s and
s the reference values are set to 0.1 A and 0 A, respectively. This scenario of small charging currents is normally present when the battery is charged at constant voltage. Once again, the control system maintains the battery current at the reference value in steady state.
The evolution of the voltage
is shown in
Figure 12b. Although the assumption that the various control systems are considered decoupled was made for the purpose of control design, they are slightly coupled, and changes in the battery current modify; therefore, the voltage
and vice versa. This coupling effect is quantified by measuring the overshoot and the undershoot of the time response. The results show that the deviations of the voltage with regard to the reference value of 350 V are effectively corrected. As the control system of the voltage
is nonlinear, different values for the overshoot and the 2%-settling time are obtained depending on the value of the battery current, yielding a maximum overshoot equal to
, a minimum undershoot equal to
, while the maximum 2%-settling time is 65.9 ms. This information is summarized in
Table 5, showing that all the features of the voltage
meet the design specifications. Furthermore, the tracking error in steady state is zero owing to the integral action for all the time intervals. The regulation of the voltage
is achieved owing to the control of the phase-shift angle
in the output voltage of the H-bridge converter associated with the primary side, as shown in
Figure 12c.
The input current through the H-bridge converter on the primary side
is plotted in
Figure 12d, while the output current of the H-bridge converter on the secondary side
is shown in
Figure 12e: Both currents experience changes in accordance with the variations of the battery current
. Moreover,
Figure 12f shows the time response of the battery voltage
, which is not constant owing to the voltage changes produced in the internal resistance
.
Although the control of the voltage
is not one of the goals of this paper, the time response of this voltage is shown in
Figure 12g: The control system is able to maintain the DC voltage at 600 V with zero-tracking error regardless of the variations in the battery current. In accordance with
Table 5, the maximum overshoot is
, the minimum undershoot is
, while the maximum 2%-settling time is 96 ms.
Figure 12h shows the evolution with time of the grid power
, the input power of the DC–DC converter
and the battery power
, which are used to compute the efficiency of the IPT system. In accordance with the SAE-J2954 standard [
36], the efficiency is calculated from the grid connection to the input terminals of the vehicle energy storage system, i.e, the input of the DC–DC converter, which means that
, while the efficiency of the complete IPT system should include the power dissipated in the DC–DC converter, yielding
.
Table 6 shows the efficiencies
and
for each time interval of the simulation: the maximum efficiency value
is 96.55% and is achieved for
A, while the efficiency is reduced drastically for
A, i.e., a small value of the charging current. Although the efficiency is obtained in a simulation environment, the maximum achieved value is in accordance with those of some commercial contactless chargers featuring a similar rated power, which exhibit an efficiency in the interval of
, as explained in [
7].
Figure 12i,j show the currents and the voltages, respectively, in steady state at the input and at the output of the compensated magnetic coupler. As the operating frequency of the IPT system is
kHz, the time response is very fast compared with the total time simulation and only a time interval of 50
is shown. The currents plotted in
Figure 12i show that the current through the primary side
contains some harmonic components, while the current through the secondary side
is almost sinusoidal owing the filtering capability of the mutual inductance
M. Furthermore, the phase-shift angle
of the input voltage on the primary side
, i.e., the output voltage of the H-bridge converter on the primary side, can be observed in
Figure 12j. The amplitude of
is 600 V, whereas the output voltage on the secondary side
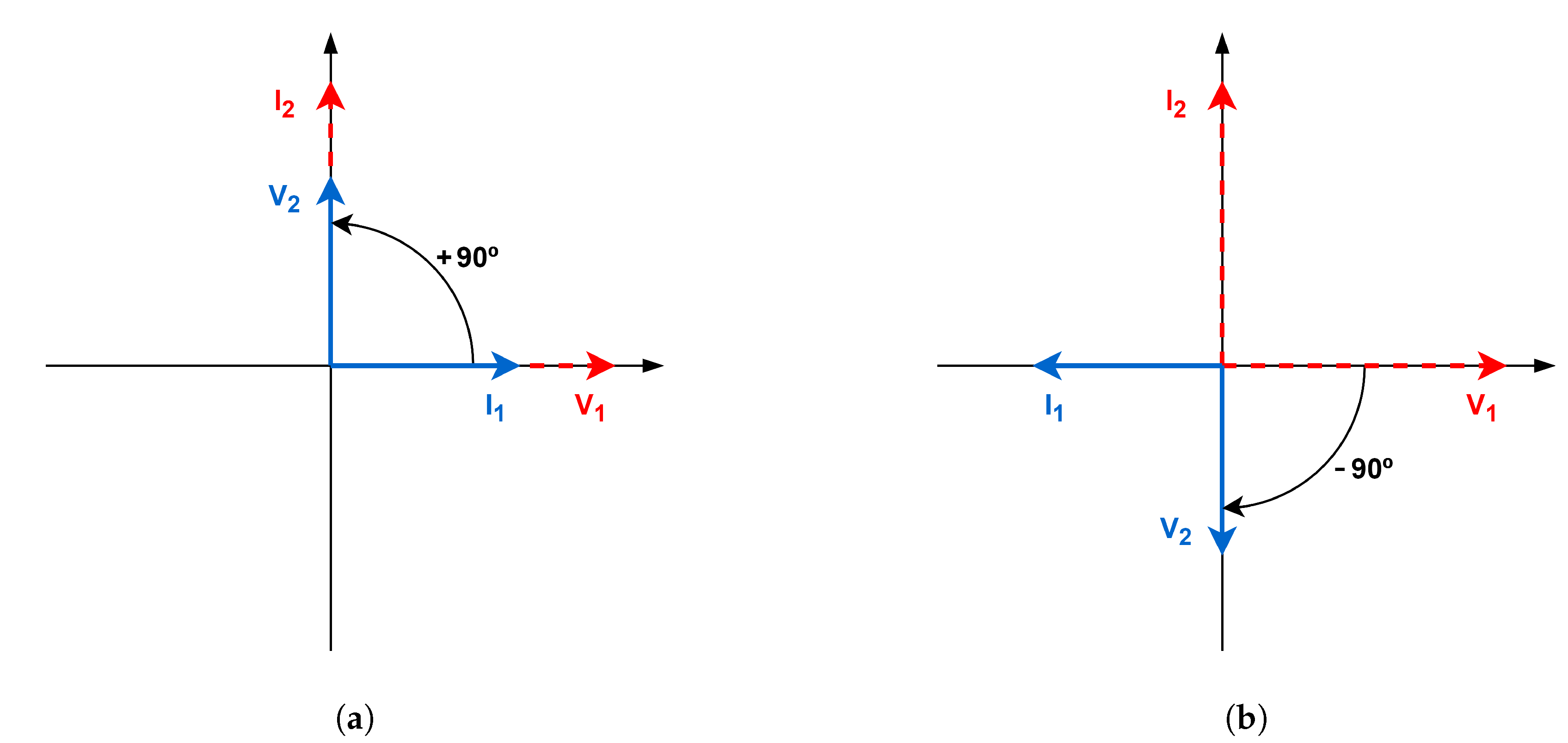
is a square waveform with amplitude 350 V, and is characterized by a phase lead of 90° with regard to
, which implies that the system operates in the G2V mode, as explained in
Section 3. Moreover, the currents and the voltages on both the primary side and the secondary side are in phase.
5.2. Simulation Results Obtained in the V2G Mode
In this case, the control scheme of the DC voltage
plotted in
Figure 8b, with the regulator
, is connected. The reference input for the voltage
is again set to 350 V and maintained constant. The control system of the current of the battery is also connected, but, in this case, the reference value is changed according to
Table 7. The total time of the simulation is 1.8 s.
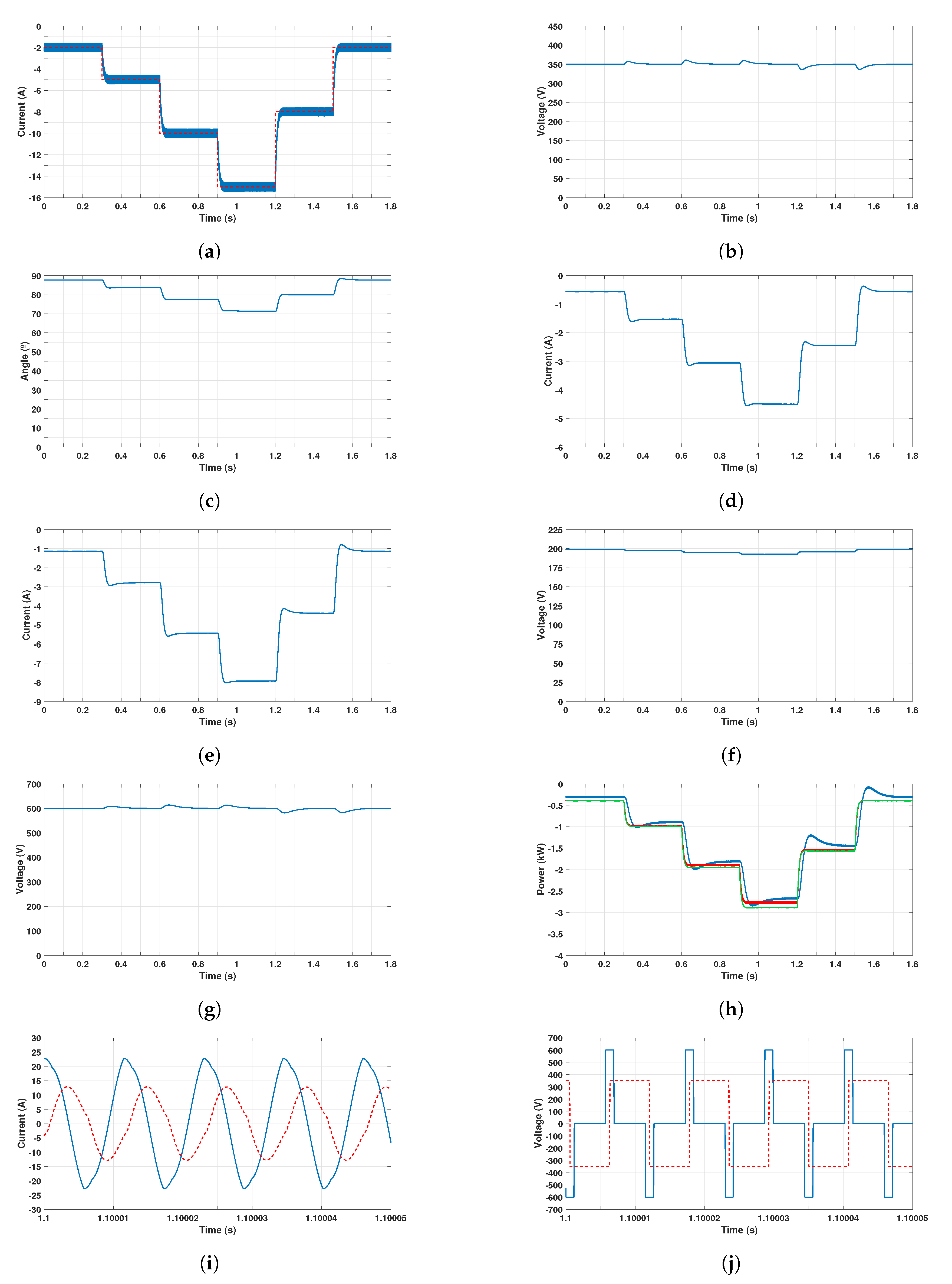
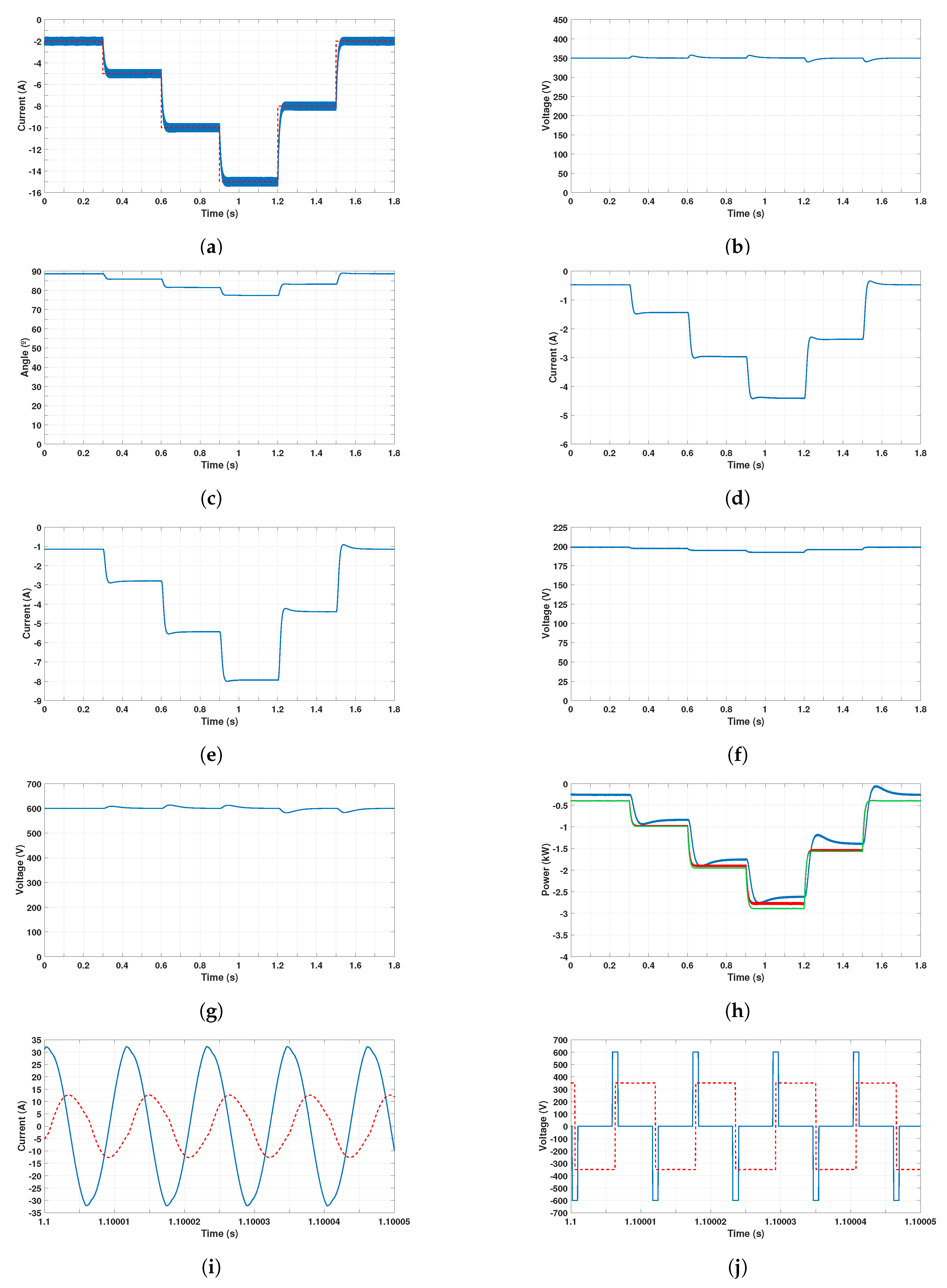
Figure 13 plots the results obtained in the V2G mode, while
Table 8 contains the main parameters of the time responses of the variables
,
, and
. The time response of the battery current
is plotted in
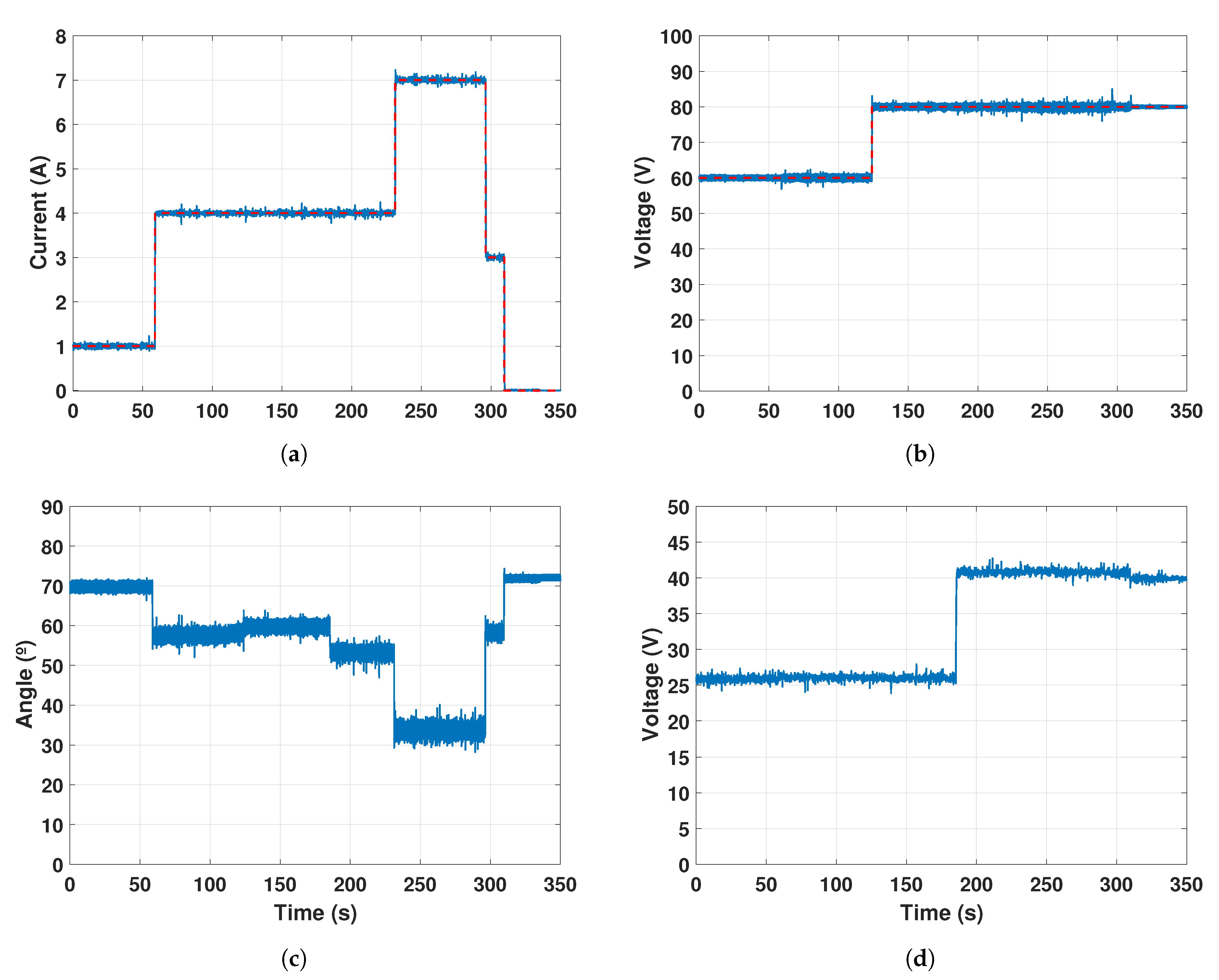
Figure 13a, in which the error in steady state is zero and the maximum 2%-settling time is 26.7 ms. Moreover, the time response does not exhibit overshoot.
Figure 13b shows the DC voltage
of the secondary circuit: the maximum overshoot caused by changes in the battery current is 3.04%, while the minimum undershoot is −4.14%, and the maximum 2%-settling time is 57.7 ms. These figures provide evidence that the coupling between both control systems is within the range of the design requirements.
Figure 13c plots the phase-shift angle
of the output voltage on the primary-side H-bridge converter. The angle
is varied by the controller
to maintain the voltage
around 350 V regardless of the variations caused by the changes in the battery current
.
Figure 13d,e plot the time responses of the input current through the H-bridge converter on the primary side
and the output current of the H-bridge converter on the secondary side
, respectively. As in the case of the G2V mode, the currents change their values in accordance with the changes in the battery current. Nonetheless, unlike the G2V mode, both currents are now negative as in the V2G mode the energy is extracted from the battery and injected into the grid. With regard to the evolution of the battery voltage
, its time response is shown in
Figure 13f: In this case, the voltage
is lower below 200 V as the drop voltage in the internal resistance
is negative owing to the negative sign of the battery current.
Figure 13g shows the time response of the DC voltage of the primary circuit
. Once again, the voltage remains around 600 V despite the overshoots and undershoots caused by the changes in the current
: The maximum overshoot is 2.26%, the minimum undershoot is −3.08% and the maximum 2%-settling time is 83.6 ms (see
Table 8 for more details).
Figure 13h shows the grid power, the power at the input of the DC–DC converter and the power of the battery. As the power flow is now opposite to that of the G2V mode, i.e., from the battery to the grid, the efficiencies should be redefined in order to avoid values greater than 100%. For that reason,
and
in the V2G mode.
Table 9 summarizes the values of the efficiencies for the different time intervals: the maximum value for the efficiency
is 96.4%, which is achieved when the current of the battery is −15 A.
Finally,
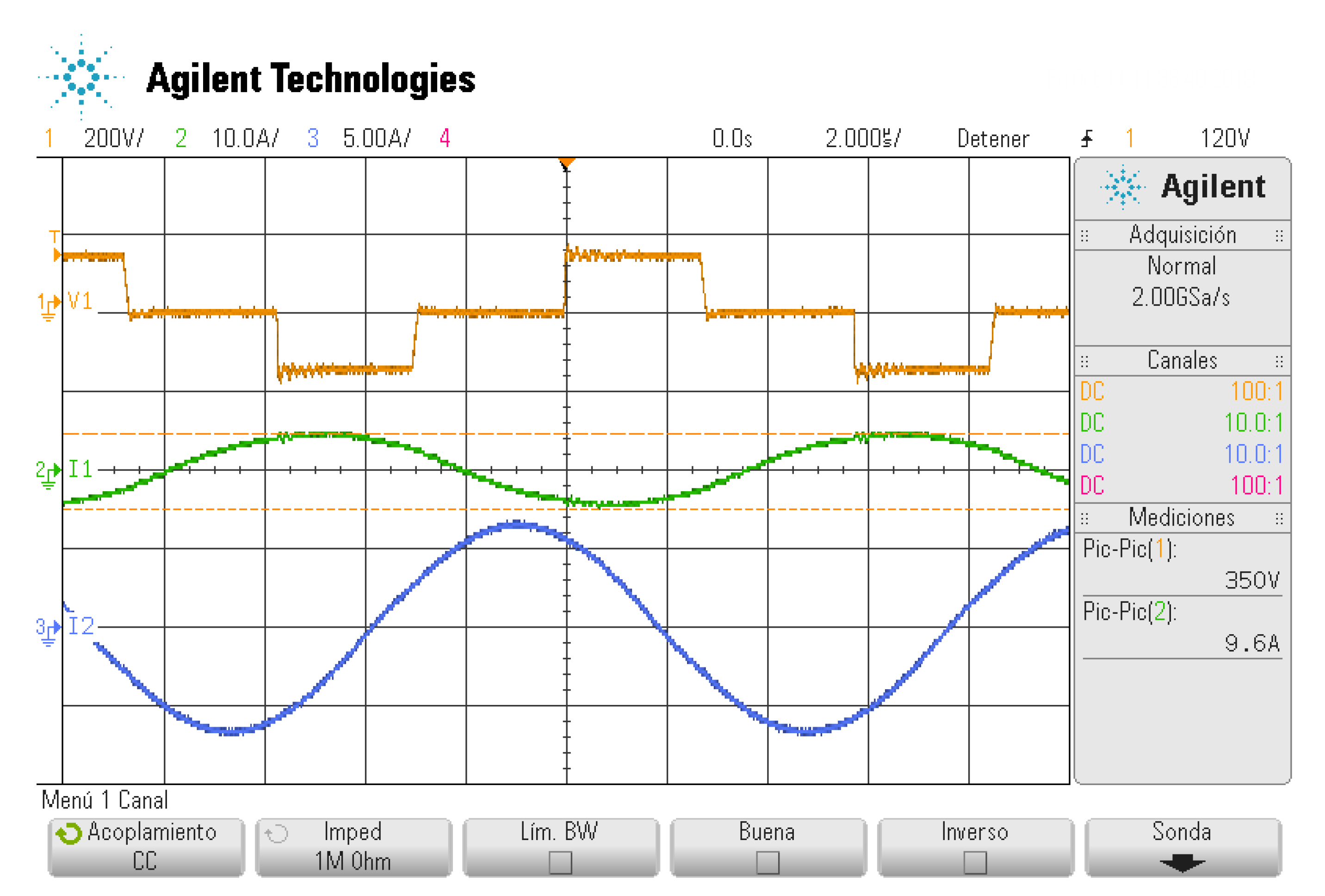
Figure 13i,j plot the currents and the voltages, respectively, in steady state at the input and at the output of the compensated magnetic coupler. Like in the G2V mode, only a time interval of 50
is considered. Both currents contain harmonic components, although they can be considered relatively sinusoidal.
Figure 13j shows that the output voltage of the H-bridge converter on the secondary side,
, is generated with a phase lag of 90° with regard to the voltage
in order to allow the system to be operated in the V2G mode (see
Section 3 for more details). Furthermore, in the V2G case, one can observe that the currents and the voltages on both the primary side and the secondary side have opposite phases, as shown in
Figure 7b.
5.3. Performance with Variations in the Coupling Factor
The design of the proposed control system requires a constant value for the coupling factor
k, and the previous simulation results have been carried out assuming that the value of
k used for the control design is equal to the actual value of the IPT system. Considering, however, that
k is expected to fluctuate around an optimal value every time the EV batteries are charged (owing to misalignment issues); this requirement may seem difficult to achieve in a real-life wireless charging scenario. Fortunately, it is feasible to get around this limitation and still assume a constant
k value in practice, recalling that previous works have recently demonstrated IPT systems especially designed to optimize the alignment of the coil coupling, either by using auxiliary sensing coils to detect the position of the EV [
37] or by designing low-frequency ferrite rod antennas integrated into the primary and the secondary device [
38]. Nevertheless, the performance of the control system should be investigated when the coupling factor undergoes deviations from its rated valued. In accordance with [
39], where the influence of the misalignment on the coupling factor is analyzed, the previous simulation cases are repeated considering a decrease in the actual value of
k of a 30% with regard to the rated value
, i.e.,
, while maintaining the same control parameters.
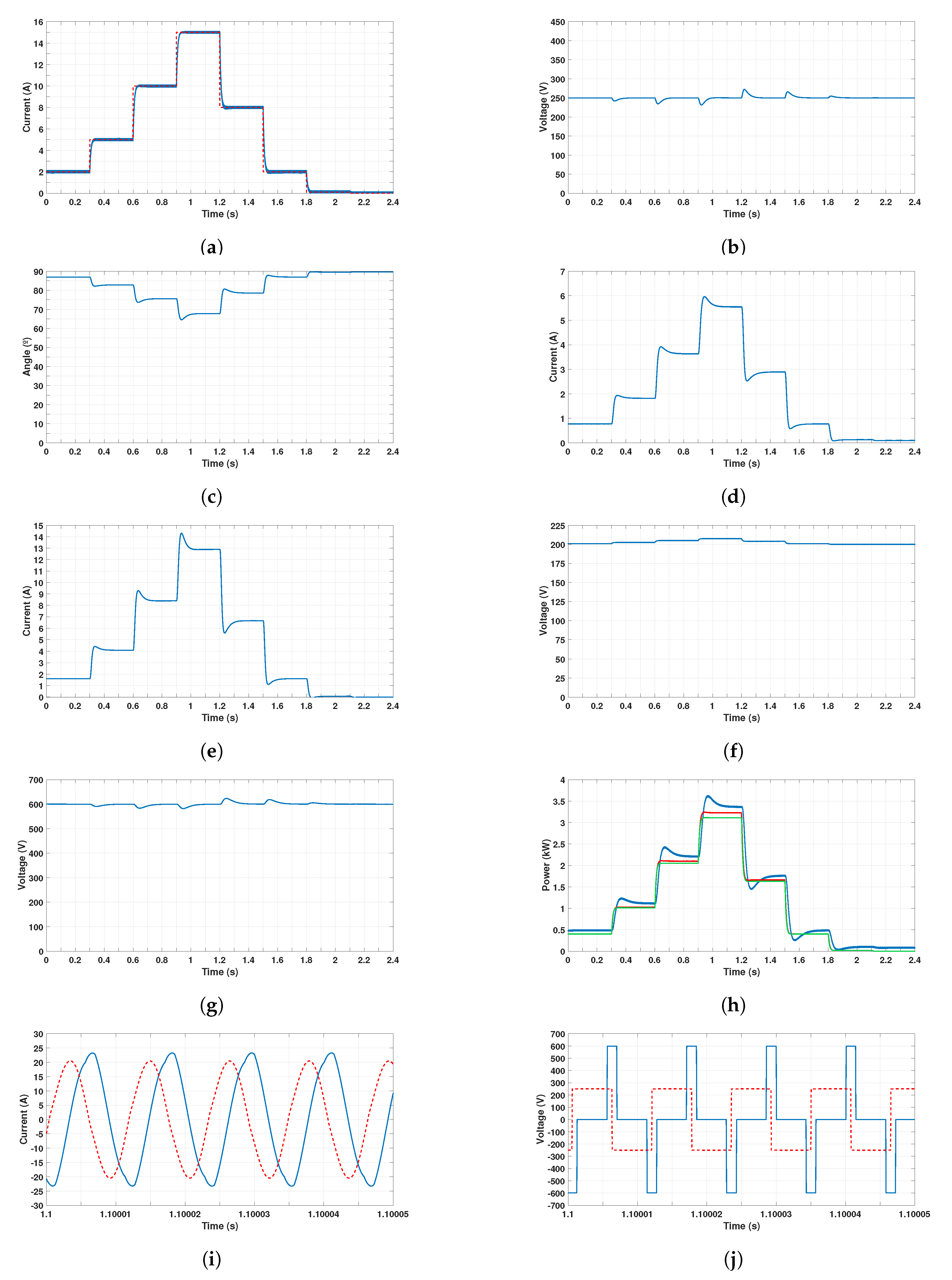
Figure 14 plots the results obtained working in the G2V mode with the same current profile and conditions as those specified in
Section 5.1. The results reveal that the control performs effectively even for low values of the current
, and the overall system is still stable even in the case of deviations from the rated
k value as large as −30%. Nevertheless, a thorough analysis shows that the time response of the battery current
(see
Figure 14a) is slower than that plotted in
Figure 12a, particularly for low values of
where the settling time is 32.6 ms for
A and 81.2 ms for
A. The main features of the time responses of
,
and
are summarized in
Table 10. With regard to the time responses of
and
, after a comparison of the information contained in
Table 5 and
Table 10; the results obtained are very similar to those obtained using the rated valued of
k, showing that the coupling between both control systems is similar, despite the decrease in
k.
Efficiencies decrease, however, when
, yielding an increase in the power absorbed from the grid in order to maintain the power injected into the battery, as shown in
Figure 14h.
Table 11 contains the efficiency values and shows a maximum value for
equal to 94.9%, i.e., a reduction of 1.6% with regard to the case of
.
Besides a lower efficiency,
Figure 14i reveals the main drawback of working with a lower coupling factor than that used in the control design in SS-compensated IPT systems [
13]: the current through the primary side of the magnetic coupler
increases from a peak value of 22.5 A (see
Figure 12i) to a peak value equal to 33.1 A. This increase reduces the efficiency and may even damage the power electronic converters if the current exceeds their rated values.
In order to avoid this drawback when
k is lower than
while operating safely the SS-compensated IPT systems, the voltage
can be reduced, which implies a reduction in the current
without the need of recalculating the control parameters. A new case study is carried out with the same conditions as the case study plotted in
Figure 14, except for the reference
being reduced from 350 V to 250 V.
The results obtained are plotted in
Figure 15 and the main features of the variables
,
and
are also summarized in
Table 10. The control system performs again effectively with
and
V, although the time response of
is slower than that obtained for the case study with rated coupling factor, with a 2%-settling time of 38.3 ms in the worst case. The time response of the voltage
yields a maximum overshoot of 8.96%, a minimum undershoot of −7.41%, and a maximum 2%-settling time of 71.2 ms. These features are worse than those obtained with
, yielding a higher coupling between both control systems. Nevertheless, the maximum overshoot is still within the range of the design specification, showing that the design of the control system is robust. The time response of the voltage
exhibits similar features to those obtained with
.
Efficiencies improve their values with regard to the case of
and
V, as shown in
Table 11, and they are very similar to those obtained with
(see
Table 6). Furthermore, the peak value of current
has been decreased, as shown in
Figure 15i, allowing, thus, a safe operation of the IPT system.
The case study of the V2G mode detailed in
Section 5.2 is also tested when
. The results obtained are plotted in
Figure 16. The global system is also stable in the V2G mode, and the control performs very effectively and yields a good regulation of the current
(see
Figure 16a) and the voltages
and
, as shown in
Figure 16b,g, respectively.
The main drawback is, once again, the increase in the primary side current of the compensated magnetic coupler , owing to the SS compensation employed in the IPT system. In order to avoid this disadvantage, the voltage is reduced, yielding, therefore, a decrease in the current , like in the case of the G2V mode.
Table 12 shows the main parameters of the time responses of the variables
,
and
. The 2%-settling time of the current
is slower than that obtained for the rated value of the coupling factor
, with a maximum value of 32.5 ms. Nevertheless, variables
and
exhibit similar properties to those obtained with
, which implies that a decrease in
k does not have a significant influence on the coupling of the voltages
and
caused by the changes in the battery current. Furthermore, efficiencies are summarized in
Table 13, which shows lower values compared to those achieved when
: The efficiency
is reduced up to 2% from its maximum value.

 ,
, 





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}