A Fast Non-Linear Symmetry Approach for Guaranteed Consensus in Network of Multi-Agent Systems


1
Department of Computer Science, Faculty of Information and Communication Technology, International Islamic University Malaysia, Kuala Lumpur 53100, Malaysia
2
Department of Natural and Applied Sciences, Faculty of Community College, Majmaah University, Majmaah 11952, Saudi Arabia
*
Authors to whom correspondence should be addressed.
Symmetry 2020, 12(10), 1692; https://doi.org/10.3390/sym12101692
Submission received: 1 September 2020
/
Revised: 4 October 2020
/
Accepted: 5 October 2020
/
Published: 15 October 2020
(This article belongs to the Special Issue Symmetry in Optimization and Control with Real World Applications)
Abstract
:There has been tremendous work on multi-agent systems (MAS) in recent years. MAS consist of multiple autonomous agents that interact with each order to solve a complex problem. Several applications of MAS can be found in computer networks, smart grids, and the modeling of complex systems. Despite numerous benefits, a significant challenge for MAS is achieving a consensus among agents in a shared target task, which is difficult without applying certain mathematical equations. Non-linear models offer better possibility of resolving consensus for MAS; however, existing non-linear models are considerably complicated and present no guarantees for achieving consensus. This paper proposes a non-linear mathematical model of semi symmetry quadratic operator (SSQO) in order to resolve the issue of consensus in networks of MAS. The model is based on stochastic quadratic operator theory, with added new notations. An important feature for the proposed model is low complexity, fast consensus, and a guaranteed capability to reach a consensus. We present an evaluation of the proposed SSQO model and comparison with other existing models. We demonstrate that an average consensus can be achieved with our model in addition to the emulation effects for the MAS consensus.
1. Introduction
In the last decade, increased attention was directed towards the coordination and control of MAS, which appeared in various situations, such as wireless sensor networks and team cooperation. New studies have recently emerged that focus on the problems related to consensus in MAS [1]. The issue of consensus is considered to be a central problem in multi-output multi-input systems (MIMOs) that have many applications in technology [2]. In this context, the consensus is defined as the way in which individual group members agree to cooperate and generate consensus among themselves in order to achieve one objective at the same time [3].
MAS are defined as a dynamic network topology consisting of several smart agents that communicate with each other to locally exchange information in order to implement a task. Consensus or agreement is one of the most important behaviors required for every group in our natural lives. In recent decades, artificial intelligence has been introduced in various fields that benefit the world in many complex and welfare services. MAS have a great role in applying these services, including applications of physics, engineering, biology, mathematics, and social sciences [4]. The consensus in MAS is the most important factor that focuses on the performance of the functions that are assigned to it. These agents communicate with each other wirelessly (local) to exchange information dynamically, where consensus is achieved through a specific protocol. However, achieving consensus in a dynamic network topology is extremely complex. There are several types of research that have developed mathematical protocols in which agents rely on consensus to form a network. These mathematical protocols are either linear or non-linear. Non-linear protocols has been proved to be more effective than linear protocols to achieve consensus in the wireless communication topology of the dynamic agent system network. However, researchers are faced with the challenge of creating a non-linear protocol to a dynamic nodes network consensus that is easy to calculate and achieve consensus in a short period of time. This paper aims to build a new non-linear protocol for a wireless network topology of dynamic multi-agent for the purpose of achieving consensus with a less complicated and less computational time.
The issue of consensus has been first discussed in relation to DeGroot’s model [5], whereby each group member interacts with its neighboring states using a linear stochastic matrix until all of them reach the same limit. Thereupon, Berger [6] has proved that the consensus of DeGroot’s model depends on the transition matrix as well as the vector column of initial states. Other researchers have reported in [7,8] offered an agreement that has been based on a network of graphs. In [9], a distributed algorithm has been generalized for the consensus in fixed topology. In [10], an arranged motion of particulars in a group has been controlled by a specific model in order to update the information from the closest neighbor. A convergence test has been done for acceleration and flocking behavior cases in [11]. Both approaches of linear and non-linear consensus protocols have been tested for distributed systems in [12] based on undirected graph theory. A comprehensive survey of several consensus models is found in [1,13].
The work has been presented by [14] discusses the approach to solve the averaging problem through the application of suitable assumptions that are based on linear iterative form. A similar study has been reported in [15] explores the cases of time to reach the consensus in time-varying networks. Meanwhile, a sensor model estimator has been developed in [16] in order to solve the problem of estimating the state of the system by exchanging information between them, where it has been discovered that in time-invariant, the cases will converge. In [17], a consensus model of a leader-follow has been designed in an event-trigger technique in consideration of a completely dynamic leader to control the tracking problem for second-order MAS.
A considerable challenge for this research involves investigating non-linear dynamic models for team agents [18]. New different approaches of non-linear models and algorithms have already been offered to resolve the issue of consensus in many types of node networks [19,20,21,22,23,24]. A proposed stochastic matrix in a non-linear model has been generated in order to control the consensus for MAS by [25,26]. An optimistic optimization approach with simple black box has been devised in a form of a non-linear structure for controlling the agents’ behavior in [27]. A non-linear class of fuzzy logic systems [28] has been discussed for the adaptive problem, where it has been concluded that the uncertain statuses can be approximated using the fuzzy logic method. A good result has been produced in a proposed quantization system in [29] for the feedback of the problem in the control systems network. Furthermore, a basic theory that is based on random consensus dynamics has been established for certain application areas [30], while a distributed dual averaging algorithm is proposed in [31] for optimizing the cooperative consensus in delay cooperation in the computational multi-agent network. The balanced statuses of the individual members have been tested in [32] under local communications networks. Additionally, a consensus in a strongly connected graph has been applied while using a novel distributed model in discrete-time situation in [33]. The work detailed in [34] involves a proposed stochastic matrix with a positive diagonal for the interactions among the network agents. In addition, symmetric communications have been studied in [35] for the consensus of multi-agents networks, while [36] has been used a strategic method for infracted networks using malignant agents to reach a consensus. The attributes of the linear consensus model have been projected to resolve the problem of consensus in slight communication networks that are based on the Markov process [37].
The study and analysis of the behaviors of a network of agents is a complex process and a source of interest that has attracted many researchers in recent years, especially with the increase in the use of artificial intelligence technology in our lives. There are many problems that have risen in this area, and the problem of consensus is one of the most important of these problems. This problem occurs when the agents’ group wants to perform a task; it requires dialogues among them and coordination to approve the ideas and agreement to carry out this task with one consensus. This consensus requires elaborate rules that can bring dispersal ideas closer together among agents and make them agree over the course of the task without interruption or delay. These rules have been studied in many previous pieces of research through which the proxies reach a consensus by adopting protocols and algorithms for mathematical equations. In this case, two types of mathematical protocols have been adopted in order to achieve consensus, the consensus in discrete-time, and consensus in continuous-time. Many researches presented in [38,39,40,41] are concerned with consensus in discrete-time, while there are also researches, such as presented in [42,43,44,45,46], which are concerned with consensus in continuous-time. However, most researches focused on the former (consensus in discrete-time), because it is considered the most challenging, as there are unstable subjective values in the matrix for each agent, which indicates that the problem of consensus for MAS in the discrete-time is more complicated compared to the case of continuous-time [47,48]. Therefore, attention is given to consensus in discrete-time for MAS in this work.
It has been shown that cubic stochastic matrices constitute powerful tools for consensus model that can significantly simplify the analysis for convergence. Quadratic stochastic consensus for MAS has been investigated in [49,50,51,52,53,54,55]. From this point, it is worth investigating a novel, less complicated consensus of non-linear control independently. This work aims to study the properties of semi symmetry quadratic operator (SSQO) convergence. We have obtained an essential condition for ensuring that the underlying cubic stochastic matrix has simple yet specified values. It has been shown that the notion of structural balance for the cubic stochastic matrix plays a crucial role in investigating the respective condition. We apply the condition to the consensus problems on MAS in order to demonstrate the importance of the obtained condition. A general notion of consensus, called ‘non-linear consensus’, is introduced, which means that the initial values of all individual members are limited equally. This has allowed us to obtain certain necessary and sufficient conditions for SSQO. These SSQO results extend and complement some existing results on the convergence of classes of quadratic stochastic operators (QSO) [56,57,58,59,60,61].
A major research contribution of this paper is the establishment of new conditions of the non-linear protocol of SSQO for consensus results, which are useful in the study of distributed coordination of MAS. In previous works dealing with the agreement coordination problems (or problems of consensus), is to identify decentralized strategies in order to ensure convergence to a common value.
2. Background and Methods
In this section, preliminary notions and notations for SSQO and based theories will be provided. The proposed model of SSQO is based on QSO [62]. New rules for the transition matrix of QSO are to be included in order to produce a less complicated model to achieve the consensus for MAS. In this case, the statuses of individual members will be duplicated as row and column and produced with the transition matrix that is based to the following protocol:
which means
where refers to agent, the total number of agents, and the indexed number for each agent in row and column forms, and is the transition matrix of the communicated agents.
is the general operator for QSO to determine the limit behavior for each member of , where is in row form and in column form; however, signifies the distributed matrices as each matrix, consists of the communications of each agent with the other agents.
Subsequently, the process will be updated using the new outputs as new inputs for the next iteration . The iterations are continued until the fixed values are reached (consensus), in the form of .
The transition matrix in QSO is distributed to matrices containing random values, where their sum is a matrix consisting of elements equal to one, as following:
However, the values of the initial statuses are random and the sum of them equals one. Because the evolutionary matrices are split into matrices and have random elements, the structure of the equations system of QSO will consist of long polynomials equations. Hence, it is necessary to establish a new class from QSO that has low computations, such as DeGroot’s linear model, as detailed in [63]. Furthermore, some studies on some classes of QSO such as doubly stochastic quadratic operators DSQO [2], modified doubly stochastic quadratic operators MDSQO [51], extreme doubly stochastic quadratic operators EDSQO [54,64] and cubic quadratic stochastic operators CQSO [18] already have a consensus MAS with some restricted conditions and drawbacks in the consensus.
Now, let us present the proposed model of SSQO for the consensus in MAS. The SSQO has the new notations in the transition matrix in Equation (1). The transition matrix of stochastic matrix (SM) has entries elements (), which are either or , where the value means that the individual member interacts with itself and 0 means idle state. Furthermore, the sum of each distributed matrices should have the same condition focusing on the matrix in QSO, which stipulates that the sum of its elements equals to , as follows
where and signify the number of rows and columns, while is the number of matrices.
3. Theoretical Result
Theorem 1.
Suppose that a team of individual agents in MAS receive information and should perform analysis. The node members will communicate with each other locally via SSQO to exchange the information for analysis and produce a decision. The team will reach to an average agreement to send the decision if at least one node has a positive initial status.
Proof.
Consider a group of agents that have at least one positive initial state where , while the others could be nonnegative. These states are or . □
Allow for the idea to participate amongst agents themselves via rules of the transition matrix of SSQO.
The represents sharing ideas in a stochastic matrix for the status of agents and . Consequently, each agent in the group shares and updates its status idea via protocol SSQO (refer to Equations (1) and (2)), as follows
Here, the process for each agent starts by multiplying the transition matrix by the current statuses of all agents in row form , then this product is multiplied again by the current statuses of agents, but, this time, in column form to produce a new status for the agent. In other words, to produce a new status for the agent, the transition matrix is multiplied by the current statuses of all agents in both row and column forms.
We want to show that, by protocol SSQO, each agent of MAS has communications of two agents with a coefficient equal to one or of with coefficient equal to .
It means that each group has the probable communications of
where and are either or .
Because the is and stochastic, as well as the coefficients for the transition matrix in SSQO, then we get that
where increases and decreases.
We obtain
where that means gets much less than , and gets much greater than .
Hence, we get that
Subsequently, we can see that in the middle of the inequality
the approximates to and because is cubic stochastic, the and will be bounded and
In other words, at time , the evolutionary stochastic matrix transfers the statuses of to .
Because increases piecemeal in the Equation (9) and, at the same time, decreases piecemeal in the Equation (10); subsequently, after repetitions, and reach the same value equally without a loss of generality, which means that consensus is achieved and reached to the average .
The implication now is that the has a (common) factor of as
in any , and .
Meanwhile, because = 1, we get
which means is bounded and fixed to .
This also means also that are bounded on
Because the are equal then
Consequently, converges.
Remark 1.
- is a non-linear model as well as DeGroot’s model, which means that it has fast convergence;
- is distinguished by a less complicated computation as well as the non-linear stochastic operators of CQSO, DSQO, and EDSQO; and,
- avoids the problem of periodic and non-changing initial values as in the case of EDSQO.
4. Discussion and Numerical Solution
In this section, we consider several cases of the SSQO protocol with a view to illustrate the related outcomes, where we define the consensus of three agents , four agents , and five agents utilizing the SSQO rules in cases of a) in Equation (1) is SM and (b)) in Equation (1) is doubly stochastic matrix (DSM). The evolutionary matrices are presented as:
Here, the rules of SM are that the elements are nonnegative and
where and are row and column, respectively, and is distributed evaluation matrix for each agent.
Although the rules of DSM are that elements are nonnegative and
Now, it is possible to present examples for all cases.
4.1. Three Agents
In the case of SM:
Using Equation (1), we obtain
In the case of DSM:
Using Equation (1), we obtain
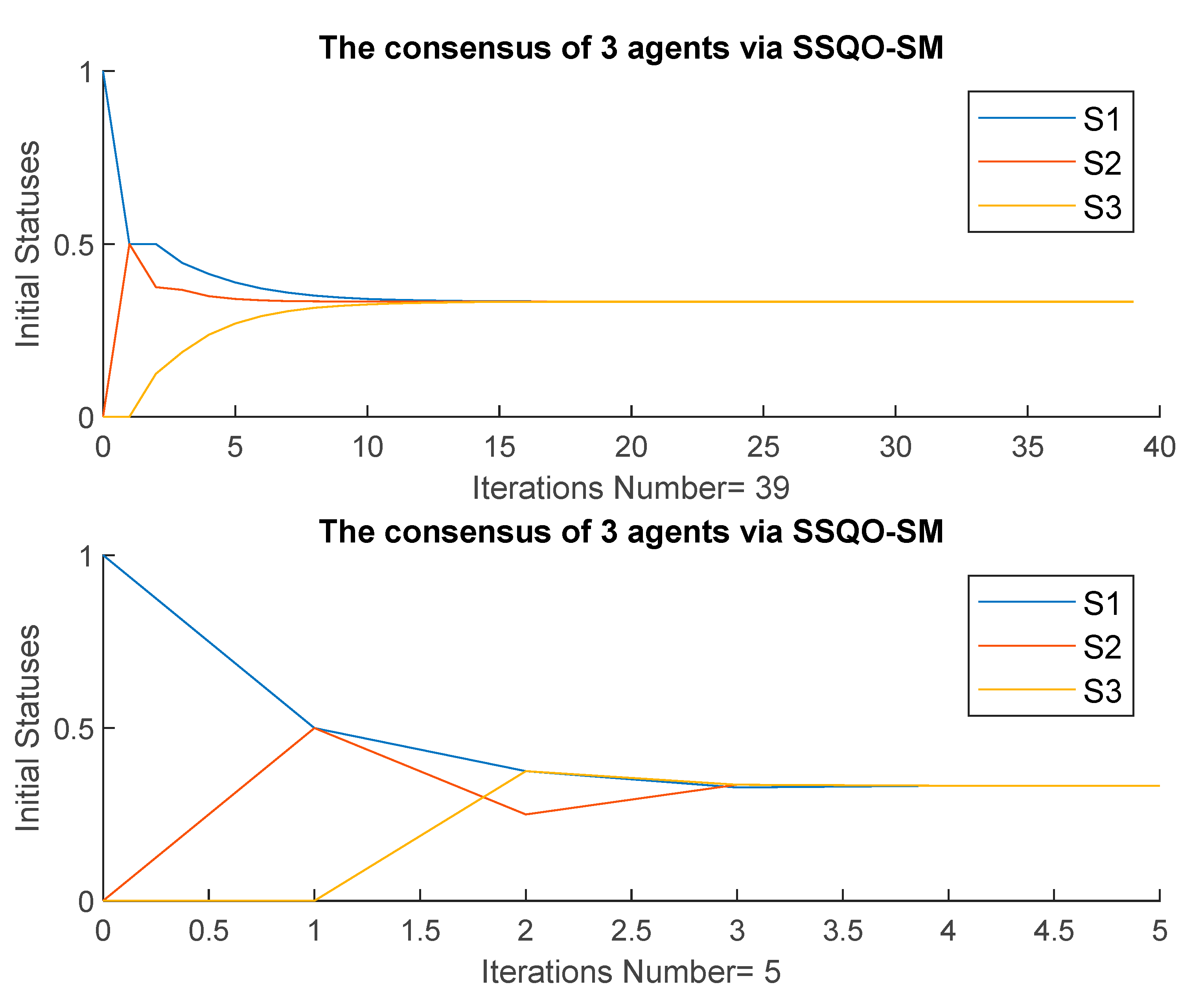
Figure 1 shows the consensus for extreme values of the initial statuses for three agents .
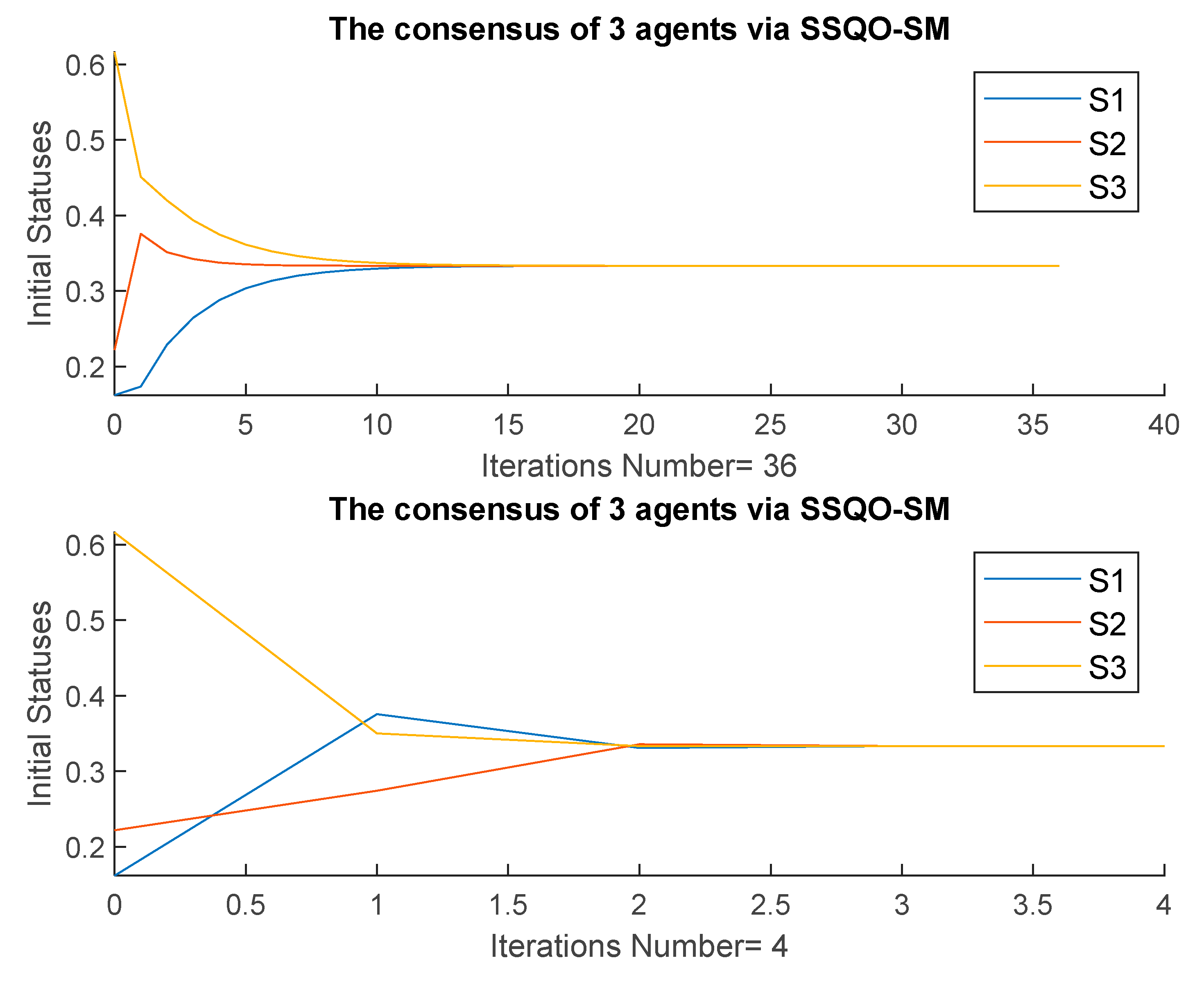
Figure 2 shows the consensus for random values of the initial statuses for three agents ().
From the simulation results presented in Figure 1 and Figure 2, we can see that SSQO achieves the consensus for three agents with initial values, with one agent having a full value while the others have zero value, as shown in Figure 1, and with positive random initial values, as shown in Figure 2. Moreover, the consensus is reached faster using DSM is than using SM. The second figure of Figure 1 and Figure 2 shows this.
4.2. Four Agents
In the case of SM:
Using Equation (1), we obtain
In the case of DSM:
Using Equation (1), we obtain
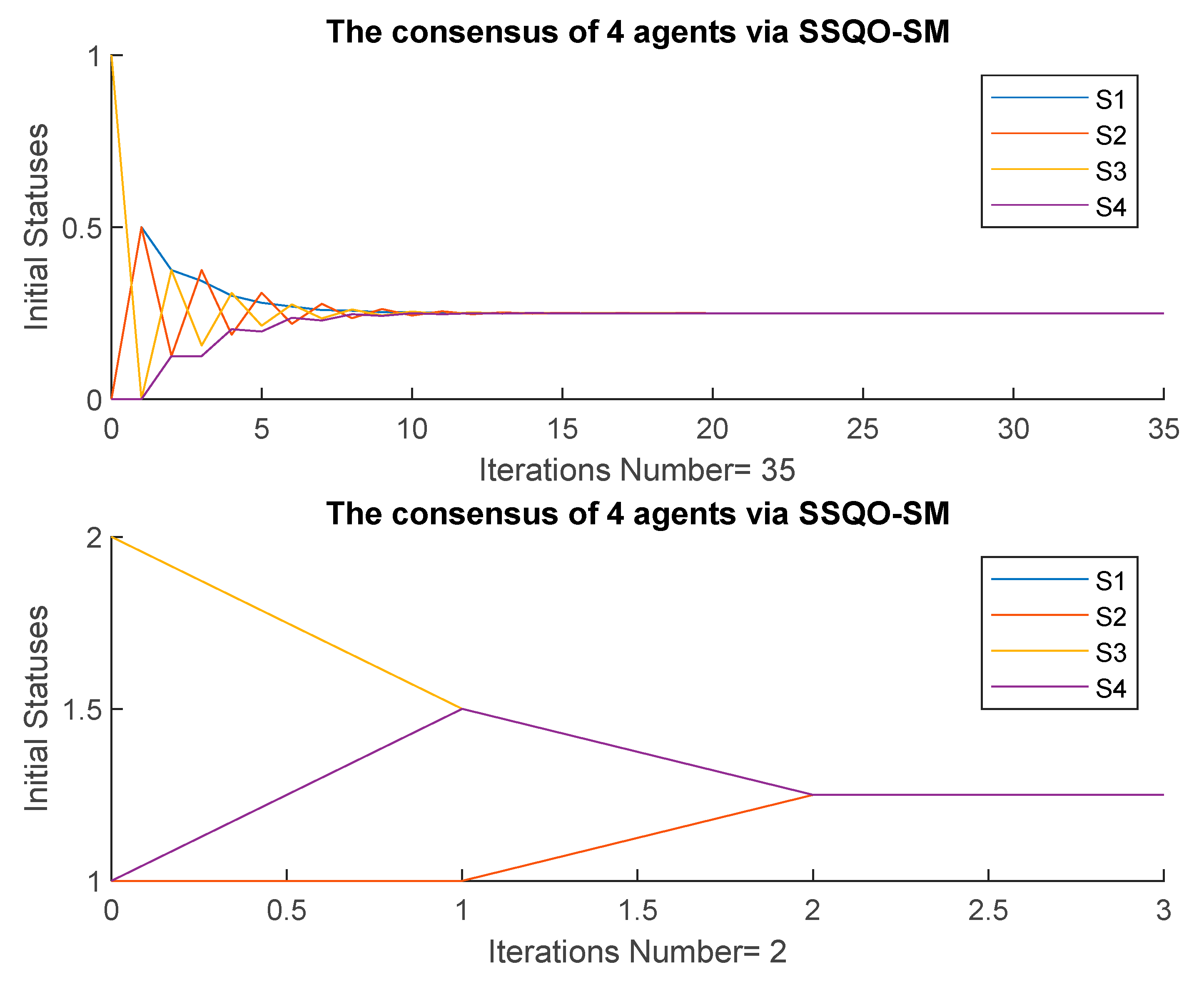
Figure 3 shows the consensus for extreme values of the initial statuses for 4 agents .
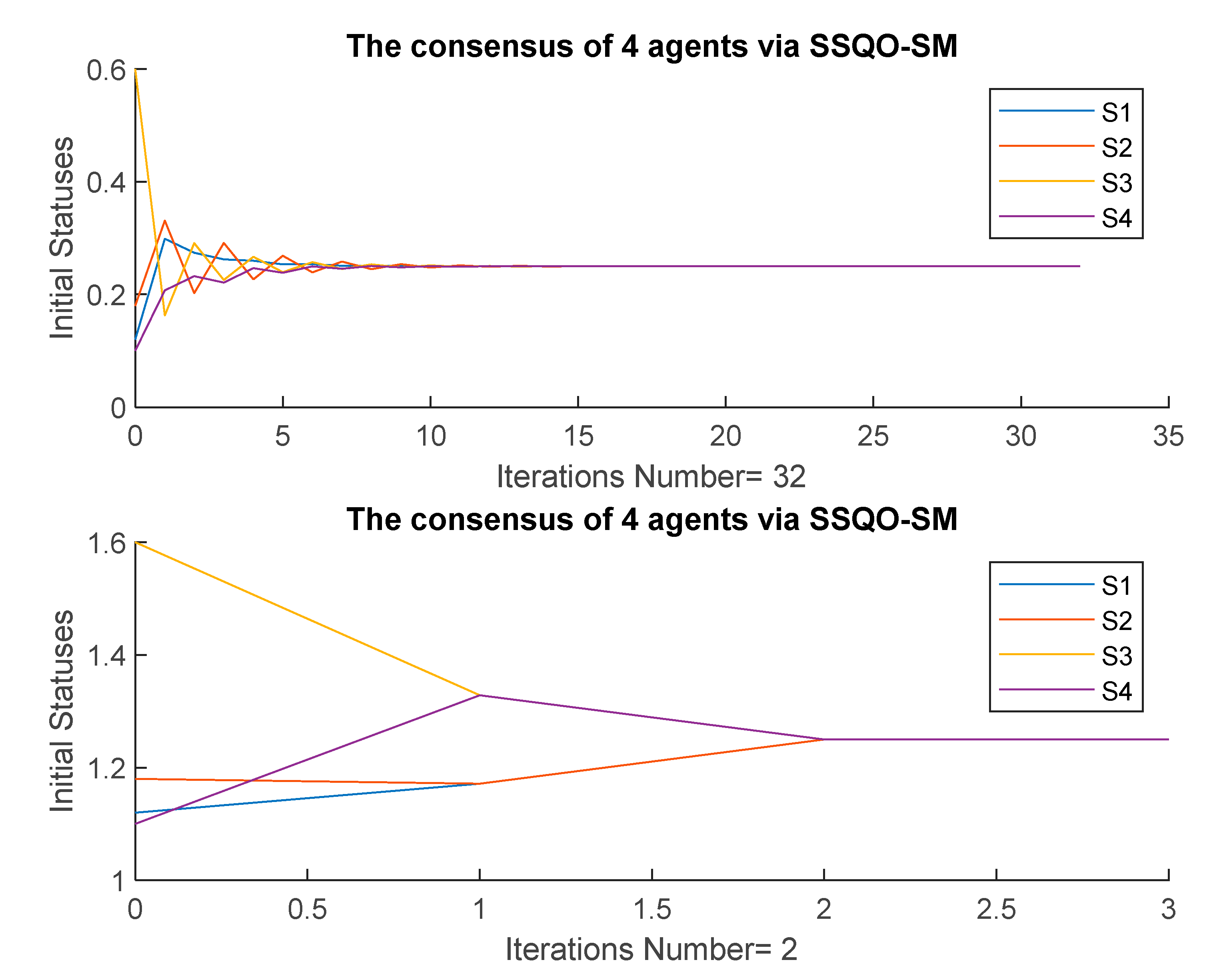
Figure 4 shows the consensus for random values of the initial statuses for four agents .
The simulation result, as shown in in Figure 3 and Figure 4, highlights that SSQO achieves the consensus for four agents with initial values. One agent has full value, while the others have zero value, as shown in Figure 3, while, in another case, the initial values are positive random values, as shown in Figure 4. Moreover, the consensus is reached faster using DSM than using SM. We can see this in Figure 3 and Figure 4.
4.3. Five Agents
In the case of SM:
Using Equation (1), we obtain
In the case of DSM:
Using Equation (1), we obtain
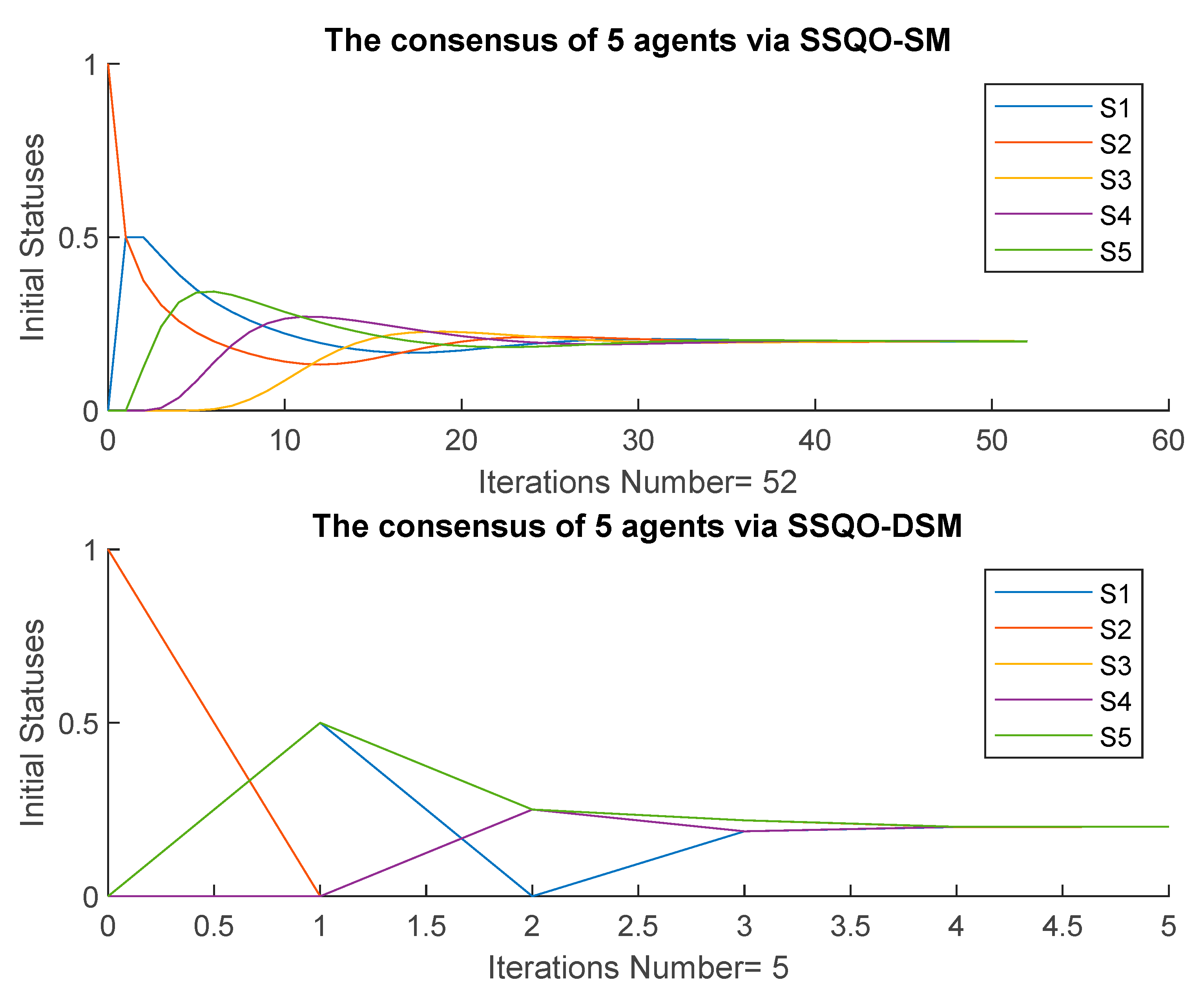
Figure 5 shows the consensus for extreme values of the initial statuses for five agents .
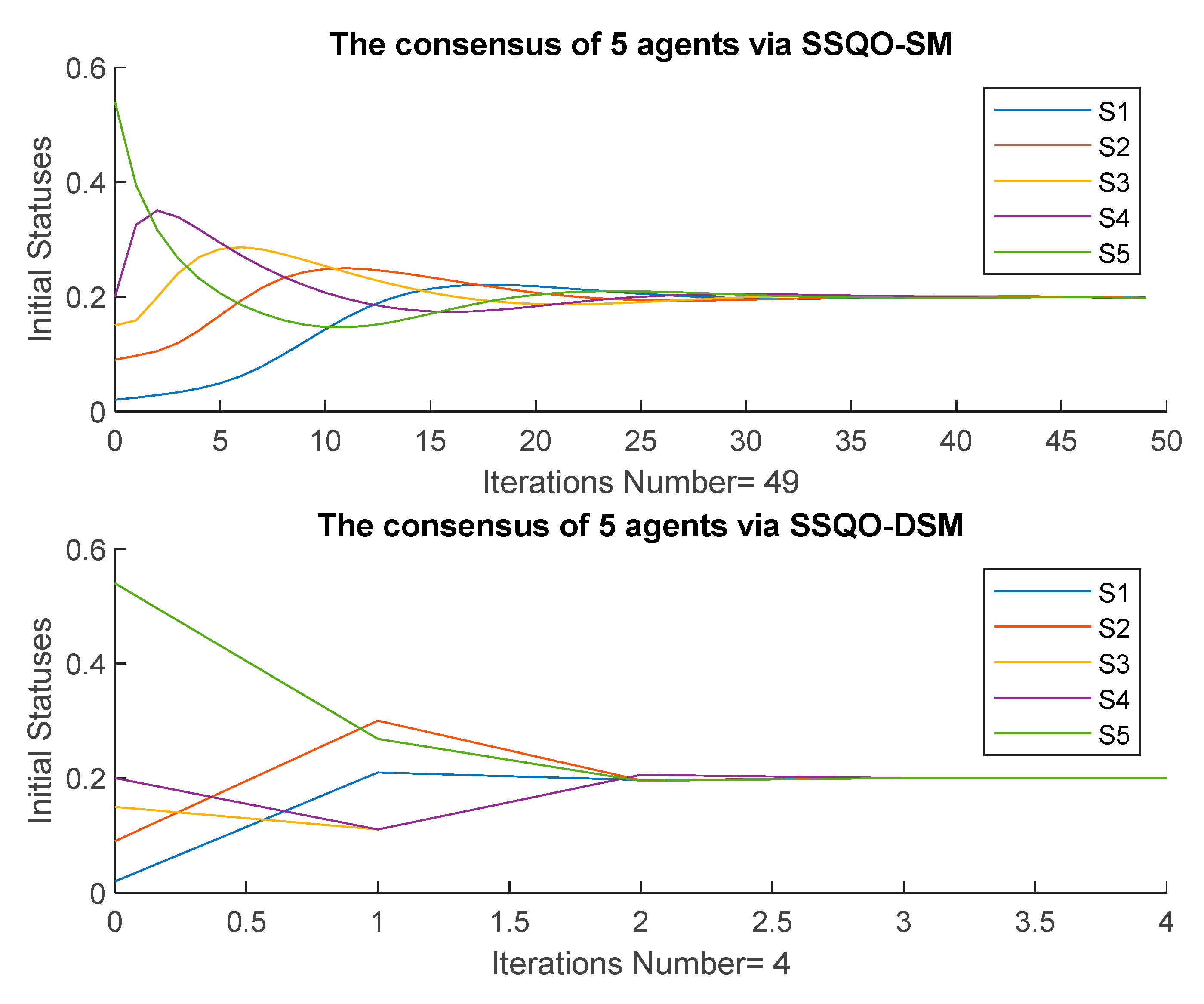
Figure 6 shows the consensus for random values of the initial statuses for five agents .
Figure 5 and Figure 6 present the consensus for five agents, where one agent has full value while the others have zero value, as shown in Figure 5, while, in another case, the initial values are positive and random, as shown in Figure 6. Additionally, the consensus is reached faster using DSM than using SM. We can see this in the second figure of Figure 5 and Figure 6.
The consensus achieved in the initial statuses utilizing SSQO rules with SM and DSM is outlined in Figure 1, Figure 2, Figure 3, Figure 4, Figure 5 and Figure 6. It can be observed that the consensus is reached faster by DSM than by SM. We can see in Figure 1, Figure 2, Figure 3, Figure 4, Figure 5 and Figure 6 that the number of iterations in DSM required to reach a consensus is fewer than by SM, with 2–5 iterations as compared to 35–52 iterations, respectively.
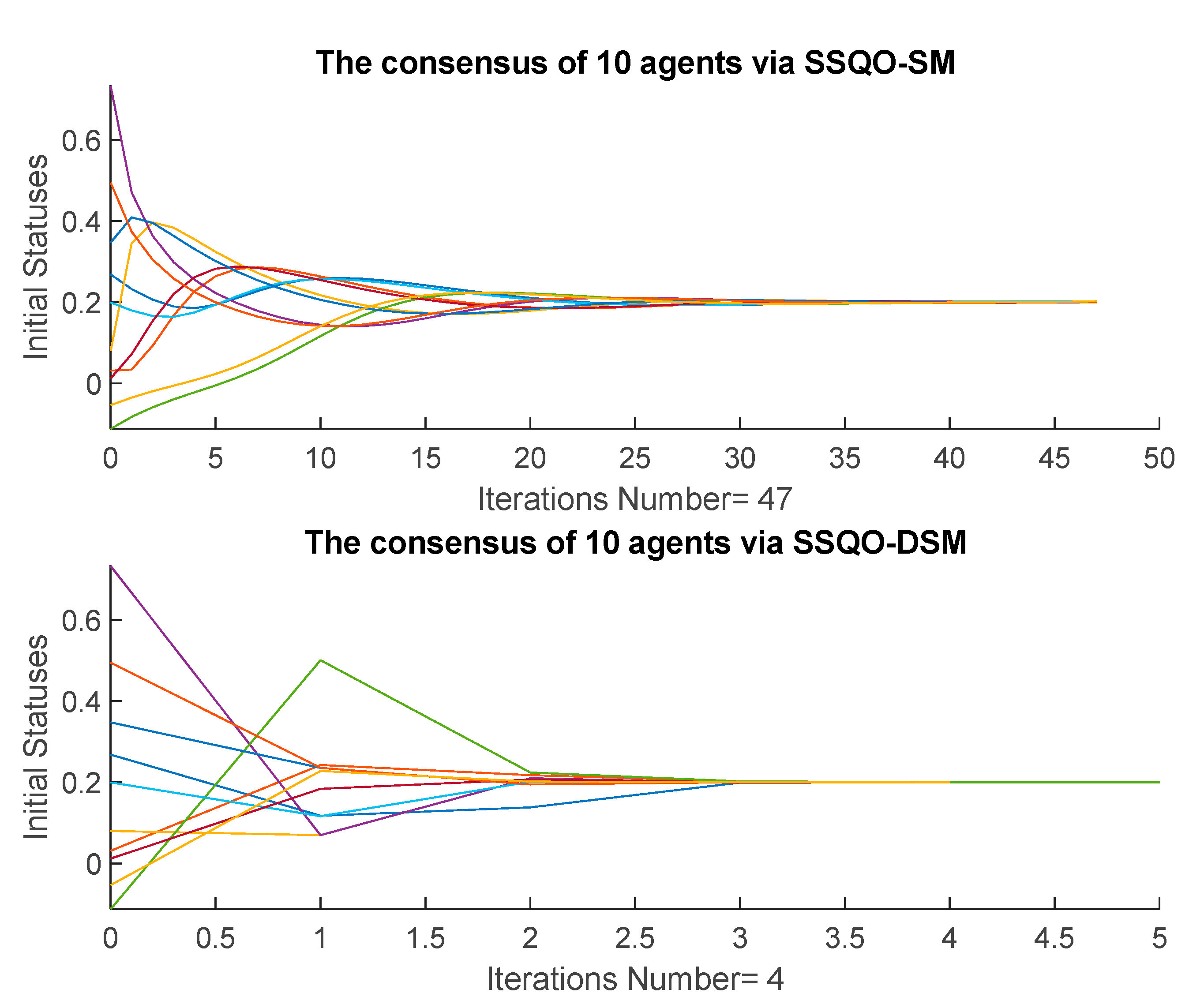
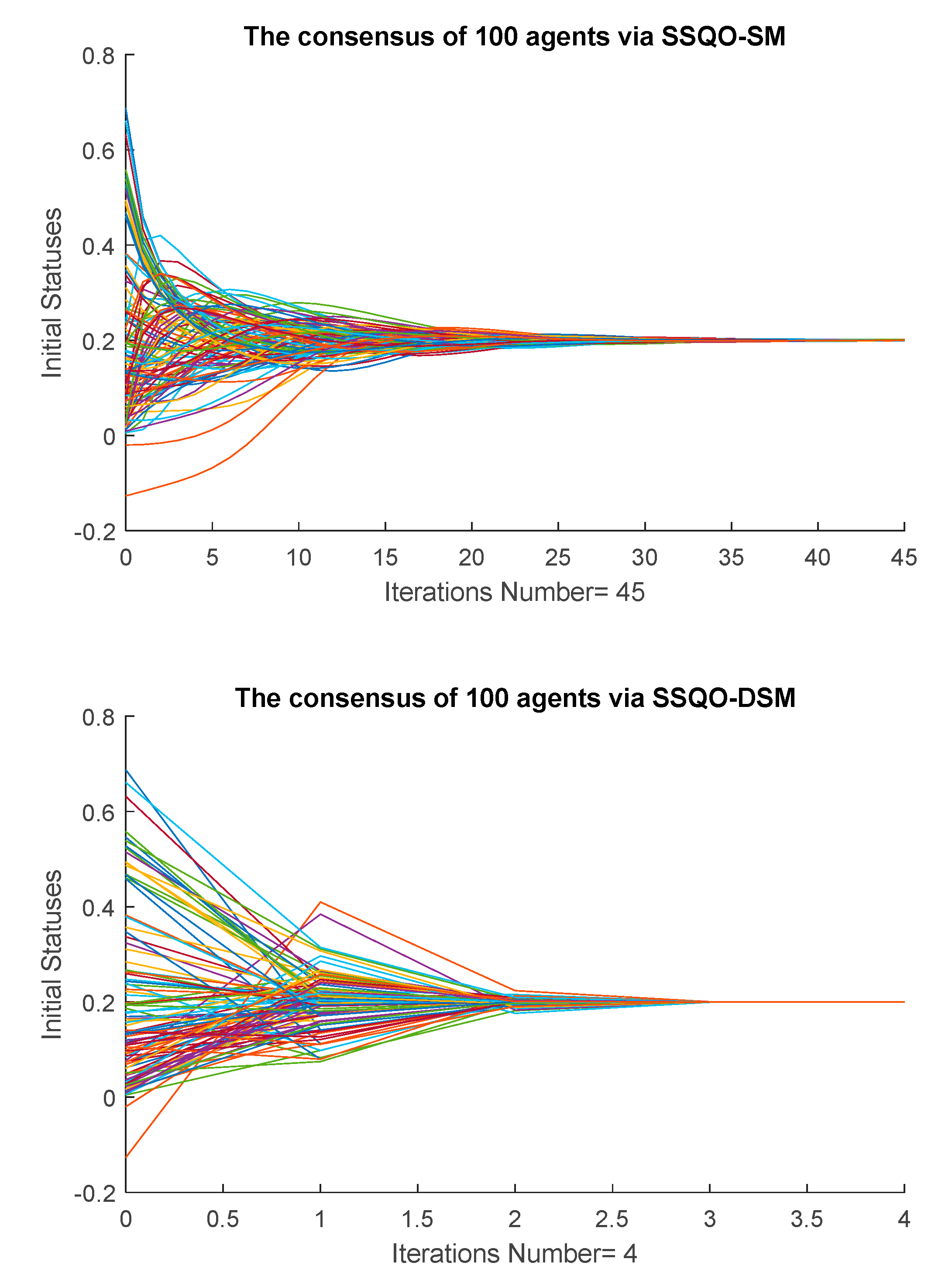
Here, we show some examples of three, four, and five agents (although the simulation can also be applied for consensus of finite agents). Figure 7 shows the consensus of 10 agents and Figure 8 for 1000 agents.
To conclude, in this section, we present some examples for three, four, and five agents using SSQO with the methods of calculation in order to prove that the SSQO reach a consensus. Figure 1, Figure 2, Figure 3, Figure 4, Figure 5 and Figure 6 emphasize the result for Theorem 1, where Figure 1 and Figure 2 for three agents, Figure 3 and Figure 4 for four agents, and Figure 5 and Figure 6 for five agents. Finally, the simulation results presented in Figure 7 and Figure 8 show the results for 10 and 100 agents, respectively.
5. Comparison of the Consensus SSQO Model with Other Consensus Models
It is worthwhile to evaluate the efficiency of the proposed SSQO model in comparison to other models of the same structure such as DeGroot [63], CQSO [18], DSQO [2], and EDSQO [54]. The abstracted Table 1 illustrates the advantages and disadvantages of each model. It also shows the evolutionary operator process and the transition matrix rules for each model; whereas Table 2 indicates the special cases of drawbacks.
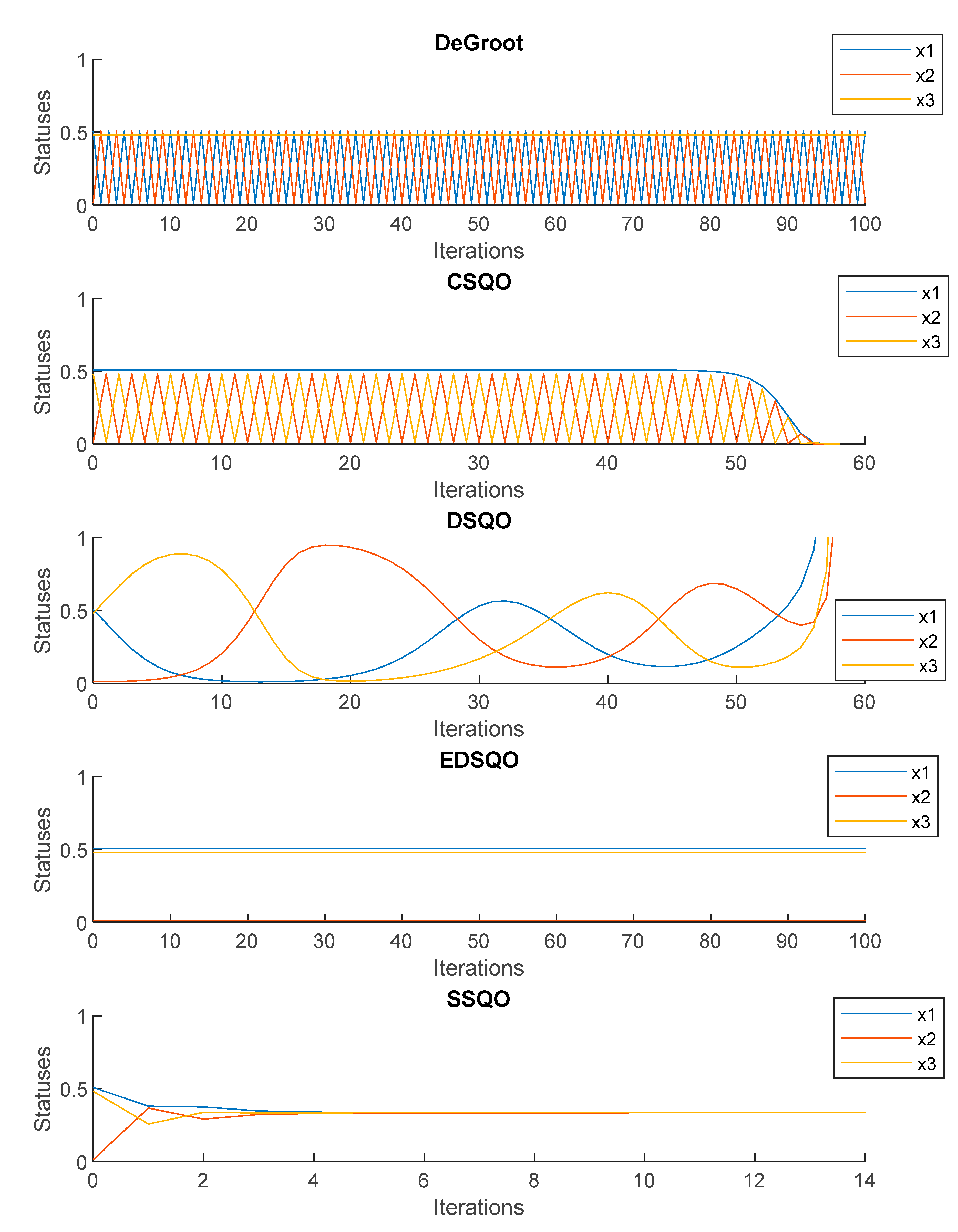
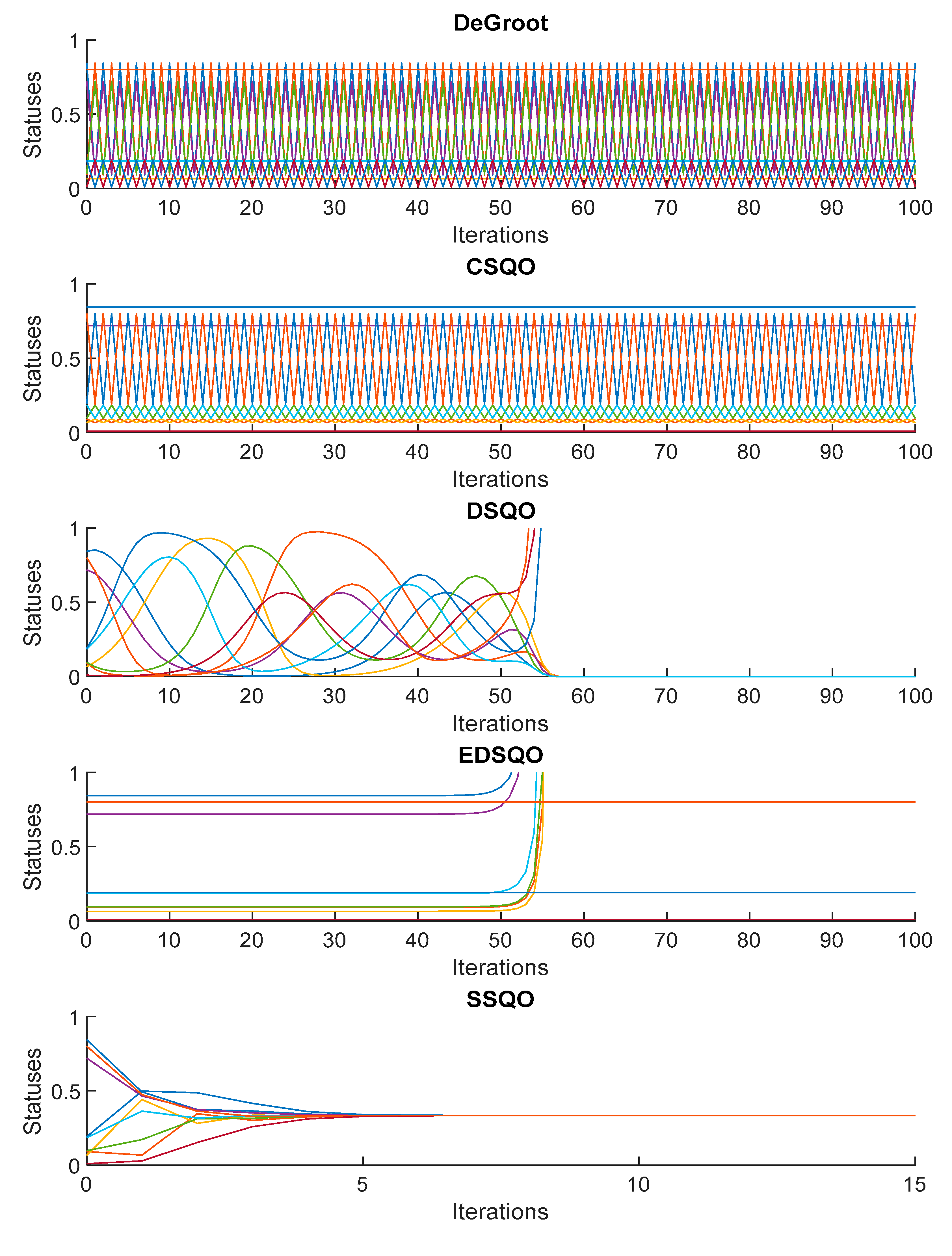
Figure 9 and Figure 10 clearly identify the weaknesses of the existing models: Figure 9 and Figure 10 show that no consensus is reached by three agents for one and 10 times with different initial statuses. No consensus is reached due to the transition matrix being periodic (DeGroot and CSQO), and selfish communication in the transition matrix (DSQO and EDSQO). As mentioned in [63], the DeGroot model reaches a consensus if and only if the transition matrix is not periodic. As mentioned in [18], the CSQO model is based on the DeGroot model and, thus, also cannot reach a consensus in the periodic case of in the transition matrix. As mentioned in [2], the models DSQO and EDSQO cannot reach a consensus in the case of the selfish communication in the transition matrix. Moreover, in terms of the limit behavior of the agent statuses, we can observe that DSQO displays smoother and long-period oscillations, while DeGroot, CSQO, and EDSQO show a period one cycle with iterations, due to the fact that DSQO has no vertices (extreme) values in the transition matrix, while DeGroot, CSQO, and EDSQO have such values in the transition matrix. After 50 iterations in DSQO, the agent statuses may diverge; the elements of each agent obtain a share factor from the product of the statuses in the transition matrix; in other words, the communication among all agents only with one agent.
Thus, in this paper, we propose a new non-linear consensus model that converges to a consensus and involves less computation. In fact, Figure 9 and Figure 10 show the weakness for the existing models of DeGroot, CSQO, DSQO, and EDSQO in one and 10 times for different random initial statuses for three agents , respectively.
In general, we have noted that the transition matrix for SSQO could be any value for nondiagonal elements that have an interaction, because the sum of and under the conditions of SSQO is stochastic and equals one in any way for those agents who interact with others. Because the and are stochastic, it makes the transition matrix fixable. It means that the interactions among agents are not under restricted conditions.
The contribution of this work is the development of a new consensus model that combines four distinct advantages. The first advantage is that the model is non-linear, the second is that the consensus is achieved fast, the third is that it requires less computation, and the fourth is that the consensus is achieved in all cases following the condition rules of the transition matrix.
6. Conclusions
In this paper, we have established a new less complicated non-linear convergence protocol of SSQO to resolve the consensus problem in MAS. This protocol generalizes both the linear model of DeGroot’s and non-linear model of QSO. We have considered several new concepts for the SSQO non-linear model that allows for dynamic agents to agree in the distributed environment through teamwork in networks under local updated interconnections. The work has shown that two important limitations must be considered when addressing the consensus for MAS, which are initial statuses of agents should be at least one positive and the evolutionary matrices should be carried out while using a cubic stochastic non-linear matrix. The investigation into the SSQO protocol has demonstrated its required properties, meaning that the model should be non-linear and enable fast convergence to consensus and less complicated computation.
Author Contributions
Conceptualization, R.A.; methodology, R.A.; software, R.A.; validation, S.A.; formal analysis, R.A.; investigation, S.A.; resources, S.A.; writing—original draft preparation, R.A.; writing—review and editing, S.A., visualization, S.A.; supervision, R.A.; project administration, S.A.; funding acquisition, S.A. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by Majmaah University under grant number [RGP-2019-29].
Acknowledgments
First: the authors would like to thank the Faculty of Information and Communication Technology, International Islamic University Malaysia. Additionally, the authors extend their appreciation to the Deanship of Scientific Research at Majmaah University for funding this work under project number NO (RGP-2019-29).
Conflicts of Interest
The authors declare no conflict of interest.
References
- Abdulghafor, R.; Abdullah, S.S.; Turaev, S.; Othman, M. An overview of the consensus problem in the control of multi-agent systems. Automatika 2018, 59, 143–157. [Google Scholar] [CrossRef]
- Abdulghafor, R.; Turaev, S.; Zeki, A.; Al-Shaikhli, I. Reach a non-linear consensus for MAS via doubly stochastic quadratic operators. Int. J. Control. 2018, 91, 1431–1459. [Google Scholar] [CrossRef]
- Van der Hoek, W.; Wooldridge, M. Multi-agent systems. Found. Artif. Intell. 2008, 3, 887–928. [Google Scholar]
- Chen, Y.; Lu, J.; Yu, X.; Hill, D.J. Multi-Agent Systems with Dynamical Topologies: Consensus and Applications. IEEE Circuits Syst. Mag. 2013, 13, 21–34. [Google Scholar] [CrossRef] [Green Version]
- Bradley, R. Reaching a consensus. Soc. Choice Welf. 2007, 29, 609–632. [Google Scholar] [CrossRef]
- Berger, R.L. A Necessary and Sufficient Condition for Reaching a Consensus Using DeGroot’s Method. J. Am. Stat. Assoc. 1981, 76, 415–418. [Google Scholar] [CrossRef]
- Tsitsiklis, J.N.; Bertsekas, D.; Athans, M. Distributed asynchronous deterministic and stochastic gradient optimization algorithms. IEEE Trans. Autom. Control 1986, 31, 803–812. [Google Scholar] [CrossRef] [Green Version]
- Tsitsiklis, J.N. Problems in Decentralized Decision Making and Computation; MIT Press: Cambridge, MA, USA, 1984. [Google Scholar]
- Lynch, N.A. Distributed Algorithms; Morgan Kaufmann: Burlington, MA, USA, 1996. [Google Scholar]
- Vicsek, T.; Czirok, A.; Ben-Jacob, E.; Cohen, I.; Shochet, O. Novel type of phase transition in a system of self-riven particles. Phys. Rev. Lett. 1995, 75, 1226–1229. [Google Scholar] [CrossRef] [Green Version]
- Bertsekas, D.P.; Tsitsiklis, J.N. Comments on “Coordination of Groups of Mobile Autonomous Agents Using Nearest Neighbor Rules. IEEE Trans. Autom. Control 2007, 52, 968–969. [Google Scholar] [CrossRef]
- Saber, R.; Murray, R. Consensus protocols for networks of dynamic agents. In Proceedings of the 2003 American Control Conference, Denver, CO, USA, 4–6 June 2003; IEEE: New York, NY, USA, 2004; Volume 2, pp. 951–956. [Google Scholar]
- Ren, W.; Beard, R.W.; Atkins, E.M. A survey of consensus problems in multi-agent coordination. In Proceedings of the 2005 American Control Conference, Portland, OR, USA, 8–10 June 2005; American Automatic Control Council: Evanston, IL, USA, 2005; pp. 1859–1864. [Google Scholar]
- Alex, O.; Tsitsiklis, J.N. Convergence Speed in Distributed Consensus and Control. SIAM Rev. SIAM 2006, 53, 747–772. [Google Scholar]
- Nedic, A.; Ozdaglar, A. Convergence rate for consensus with delays. J. Glob. Optim. 2008, 47, 437–456. [Google Scholar] [CrossRef]
- Duan, P.; Duan, Z.; Chen, G.; Shi, L. Distributed state estimation for uncertain linear systems: A regularized least-squares approach. Automatica 2020, 117, 109007. [Google Scholar] [CrossRef]
- Duan, P.; Liu, K.; Huang, N.; Duan, Z. Event-Based Distributed Tracking Control for Second-Order Multiagent Systems with Switching Networks. IEEE Trans. Syst. Man. Cybern. Syst. 2020, 50, 3220–3230. [Google Scholar] [CrossRef]
- Abdulghafor, R.; Abdullah, S.S.; Turaev, S.; Zeki, A.; Al-Shaikhli, I. Linear and non-linear stochastic distribution for consensus problem in multi-agent systems. Neural. Comput. Appl. 2020, 32, 261–277. [Google Scholar] [CrossRef]
- Yu, W.; Chen, G.; Cao, M.; Kurths, J. Second-order consensus for multi-agent systems with directed topologies and non-linear dynamics. IEEE Trans. Syst. Man. Cybern. Part B 2020, 40, 881–891. [Google Scholar]
- Bishop, A.N.; Doucet, A. Consensus in the Wasserstein Metric Space of Probability Measures. arXiv 2014, arXiv:1404:0145. [Google Scholar]
- Zhu, M.; Martínez, S. Discrete-time dynamic average consensus. Automatica 2010, 46, 322–329. [Google Scholar] [CrossRef]
- Ajorlou, A.; Momeni, A.; Aghdam, A.G. Sufficient conditions for the convergence of a class of non-linear distributed consensus algorithms. Automatica 2011, 47, 625–629. [Google Scholar] [CrossRef] [Green Version]
- Bolouki, S. Linear Consensus Algorithms: Structural Properties and Connections with Markov Chains; Diss. École Polytechnique de Montréal: Montreal, QC, Canada, 2014. [Google Scholar]
- Schwarz, V.; Matz, G. Non-linear average consensus based on weight morphing. In Proceedings of the Acoustics, Speech and Signal Processing (ICASSP) 2012 IEEE International Conference, Kyoto, Japan, 27–29 March 2012; pp. 3129–3132. [Google Scholar]
- Bajovic, D.; Xavier, A.; Moura, E.F.; Sinopoli, B.; Xavier, J. Consensus and Products of Random Stochastic Matrices: Exact Rate for Convergence in Probability. IEEE Trans. Signal Process. 2013, 61, 2557–2571. [Google Scholar] [CrossRef] [Green Version]
- Meng, D.; Jia, Y.; Du, J.; Zhang, J. On iterative learning algorithms for the formation control of non-linear multi-agent systems. Automatica 2014, 50, 291–295. [Google Scholar] [CrossRef]
- Busoniu, L.; Morarescu, I.C. Consensus for black-box non-linear agents using optimistic optimization. Automatica 2014, 50, 1201–1208. [Google Scholar] [CrossRef] [Green Version]
- Ma, L.; Huo, X.; Zhao, X.; Zong, G. Adaptive fuzzy tracking control for a class of uncertain switched non-linear systems with multiple constraints: A small-gain approach. Int. J. Fuzzy Syst. 2019, 21, 2609–2624. [Google Scholar] [CrossRef]
- Song, J.-S.; Chang, X.-H. H∞ controller design of networked control systems with a new quantization structure. Appl. Math. Comput. 2020, 376, 125070. [Google Scholar] [CrossRef]
- Fagnani, F. Consensus dynamics over networks. Tech. Pap. 2014, 66, 1–25. [Google Scholar]
- Wang, H.; Liao, X.; Huang, T.; Li, C. Cooperative distributed optimization in multi-agent networks with delays. IEEE Trans. Syst. Man. Cybern. Syst. 2015, 45, 363–369. [Google Scholar] [CrossRef]
- Ghaderi, J.; Srikant, R. Opinion dynamics in social networks with stubborn agents: Equilibrium and convergence rate. Automatica 2014, 50, 3209–3215. [Google Scholar] [CrossRef]
- Priolo, A.; Gasparri, A.; Montijano, E.; Sagues, C. A distributed algorithm for average consensus on strongly connected weighted digraphs. Automatica 2014, 50, 946–951. [Google Scholar] [CrossRef]
- Hendrickx, J.M.; Shi, G.; Johansson, K.H. Finite-Time Consensus Using Stochastic Matrices with Positive Diagonals. IEEE Trans. Autom. Control 2014, 60, 1070–1073. [Google Scholar] [CrossRef] [Green Version]
- Lin, P.; Ren, W. Constrained Consensus in Unbalanced Networks with Communication Delays. IEEE Trans. Autom. Control 2013, 59, 775–781. [Google Scholar] [CrossRef]
- LeBlanc, H.J.; Zhang, H.; Sundaram, S.; Koutsoukos, X. Consensus of multi-agent networks in the presence of adversaries using only local information. In Proceedings of the 1st international conference on High Confidence Networked Systems, Beijing, China, 17–19 April 2012; Association for Computing Machinery: New York, NY, USA, 2012; pp. 1–10. [Google Scholar]
- Matei, I.; Baras, J.S.; Somarakis, C. Convergence Results for the Linear Consensus Problem under Markovian Random Graphs. SIAM J. Control Optim. 2013, 51, 1574–1591. [Google Scholar] [CrossRef]
- Moreau, L. Stability of multi-agent systems with time-dependent communication links. IEEE Trans. Automat. Contr. 2015, 50, 169–182. [Google Scholar] [CrossRef]
- Blondel, V.D.; Hendrickx, J.M.; Olshevsky, A.; Tsitsiklis, J.N. Convergence in multi-agent coordination, consensus, and flocking. In Proceedings of the 44th IEEE Conference, Seville, Spain, 12–15 December 2005; pp. 2996–3000. [Google Scholar]
- Fang, L.; Antsaklis, P. On Communication Requirements for Multi-agent Consensus Seeking. In Lecture Notes in Control and Information Science; Springer: Berlin/Heidelberg, Germany, 2006; pp. 53–67. [Google Scholar]
- Xiao, F.; Wang, L. Consensus protocols for discrete-time multi-agent systems with time-varying delays. Automatica 2008, 44, 2577–2582. [Google Scholar] [CrossRef]
- Jadbabaie, A.; Lin, J.; Morse, A.S. Coordination of groups of mobile autonomous agents using nearest neighbor rules. IEEE Trans. Autom. Control 2003, 48, 988–1001. [Google Scholar] [CrossRef] [Green Version]
- Moreau, L. Stability of continuous-time distributed consensus algorithms. In Proceedings of the 2004 43rd IEEE Conference on Decision and Control (CDC) (IEEE Cat. No.04CH37601), Nassau, Bahamas, 14–17 December 2004; Volume 4, pp. 3998–4003. [Google Scholar] [CrossRef] [Green Version]
- Ren, W.; Beard, R.W. Consensus seeking in multi-agent systems under dynamically changing interaction topologies. IEEE Trans. Automat. Contr. 2005, 50, 655–661. [Google Scholar] [CrossRef]
- Ghabcheloo, R.; Aguiar, A.P.; Pascoal, A.M.; Silvestre, C.J. Synchronization in multi-agent systems with switching topologies and non-homogeneous communication delays. In Proceedings of the 46th IEEE Conference on Decision and Control, New Orleans, LA, USA, 12–14 December 2007; pp. 2327–2332. [Google Scholar]
- Münz, U.; Papachristodoulou, A.; Allgöwer, F. Consensus reaching in multi-agent packet-switched networks with non-linear coupling. Int. J. Control 2009, 82, 953–969. [Google Scholar] [CrossRef]
- Li, Z.; Duan, Z.; Chen, G.; Huang, L. Consensus of multi-agent systems and synchronization of complex networks: A unified viewpoint. IEEE Trans. Circuits Syst. I Regul. Pap. 2009, 57, 213–224. [Google Scholar]
- Li, Z.; Duan, Z.; Chen, G. Dynamic consensus of linear multi-agent systems. IET Control Theory Appl. 2011, 5, 19–28. [Google Scholar] [CrossRef]
- Abdulghafor, R.; Turaev, S. Consensus of fractional non-linear dynamics stochastic operators for multi-agent systems. Inf. Fusion 2018, 44, 1–21. [Google Scholar] [CrossRef]
- Abdulghafor, R.; Turaev, S.; Izzuddin, M. Non-linear Models for Distributed Consensus Modified from DSQO in Networks of Dynamic Agents. In Proceedings of the 4th International Conference on Mathematical Sciences, Putrajaya, Malaysia, 15–17 November 2016. [Google Scholar]
- Abdulghafor, R.; Almotairi, S.; Almohamedh, H.; Turaev, S.; Almutairi, B. Non-linear Consensus Protocol Modified from Doubly Stochastic Quadratic Operators in Networks of Dynamic Agents. Symmetry 2019, 11, 1519. [Google Scholar] [CrossRef] [Green Version]
- Abdulghafor, R.; Turaev, S.; Tamrin, I. Non-linear consensus for multi-agent systems using positive intractions of doubly stochastic quadratic operators. Int. J. Perceptive Cogn. Comput. 2016, 2, 19–22. [Google Scholar]
- Abdulghafor, R.; Turaev, S.; Zeki, A.; Abubaker, A. Non-linear convergence algorithm: Structural properties with doubly stochastic quadratic operators for multi-agent systems. J. Artif. Intell. Soft Comput. Res. 2018, 8, 49–61. [Google Scholar] [CrossRef] [Green Version]
- Abdulghafor, R.; Almotairi, S.; Almohamedh, H.; Almutairi, B.; Bajahzar, A.; Almutairi, S.S. A Non-linear Convergence Consensus: Extreme Doubly Stochastic Quadratic Operators for Multi-Agent Systems. Symmetry 2020, 12, 1519. [Google Scholar] [CrossRef] [Green Version]
- Abdulghafor, R.; Turaev, S.; Zeki, A.; Shahidi, F. The convergence consensus of multi-agent systems controlled via doubly stochastic quadratic operators. In Proceedings of the 2015 International Symposium on Agents, Multi-Agent Systems and Robotics (ISAMSR), Putrajaya, Malaysia, 18–19 August 2015; Volume 22, pp. 59–64. [Google Scholar] [CrossRef]
- Abdulghafor, R.; Shahidi, F.; Zeki, A.M.; Turaev, S. Dynamics of doubly stochastic quadratic operators on a finite-dimensional simplex. Open Math. 2016, 14, 509–519. [Google Scholar] [CrossRef]
- Abdulghafor, R.; Turaev, S.; Zeki, A. Necessary and Sufficient Conditions for Complementary Stochastic Quadratic Operators of Finite-Dimensional Simplex. Sukkur IBA J. Comput. Math. Sci. 2017, 1, 22–27. [Google Scholar] [CrossRef] [Green Version]
- Abdulghafor, R.; Turaev, S.; Abubakar, A.; Zeki, A. The Extreme Doubly Stochastic Quadratic Operators on Two Dimensional Simplex. In Proceedings of the 4th International Conference on Advanced Computer Science Applications and Technologies (ACSAT), Kuala Lumpur, Malaysia, 8–10 December 2015; pp. 192–197. [Google Scholar]
- Shahidi, F.; Ganikhodzhaev, R.; Abdulghafor, R. The dynamics of some extreme doubly stochastic quadratic operators. Middle East J. Sci. Res. 2013, 13, 59–63. [Google Scholar]
- Abdulghafor, R.; Abdullah, S.S.; Turaev, S.; Hassan, R. The non-linear limit control of EDSQOs on finite dimensional simplex. Automatika 2019, 60, 404–412. [Google Scholar] [CrossRef] [Green Version]
- Abdulghafor, R.; Shahidi, F.; Zeki, A.M.; Turaev, S. Dynamics Classifications of Extreme Doubly Stochastic Quadratic Operators on 2D Simplex. In Lecture Notes in Electrical Engineering; Springer: Berlin/Heidelberg, Germany, 2015; pp. 323–335. [Google Scholar]
- Bernstein, S. Solution of a Mathematical Problem Connected with the Theory of Heredity. Ann. Math. Stat. 1942, 13, 53–61. [Google Scholar] [CrossRef]
- DeGroot, M.H. Reaching a consensus. J. Am. Stat. Assoc. 1974, 69, 118–121. [Google Scholar] [CrossRef]
- Abdulghafor, R.; Almohamedh, H.; Almutairi, B.; Wani, S.; Alharbi, A.; Almutairi, S.S.; Almotairi, S. EDSQ Operator on 2DS and Limit Behavior. Symmetry 2020, 12, 820. [Google Scholar] [CrossRef]
Figure 1.
The consensus of three agents by semi symmetry quadratic operator (SSQO) using stochastic matrix (SM) and doubly stochastic matrix (DSM) with initial statuses of (0, 1, 0).
Figure 1.
The consensus of three agents by semi symmetry quadratic operator (SSQO) using stochastic matrix (SM) and doubly stochastic matrix (DSM) with initial statuses of (0, 1, 0).

Figure 2.
The consensus of three agents by SSQO using SM and DSM with initial statuses of (0.162, 0.222, 0.616) (random).
Figure 2.
The consensus of three agents by SSQO using SM and DSM with initial statuses of (0.162, 0.222, 0.616) (random).

Figure 3.
The consensus of four agents SSQO using SM and DSM with initial statuses of (0, 0, 1, 0).

Figure 4.
The consensus of four agents by SSQO by SM and DSM with initial statuses of (0.12, 0.18, 0.60, 0.10) (random).
Figure 4.
The consensus of four agents by SSQO by SM and DSM with initial statuses of (0.12, 0.18, 0.60, 0.10) (random).

Figure 5.
The consensus of five agents by SSQO using SM and DSM with initial statuses of (0, 1, 0, 0, 0).
Figure 5.
The consensus of five agents by SSQO using SM and DSM with initial statuses of (0, 1, 0, 0, 0).

Figure 6.
The consensus of five agents by SSQO by SM and DSM for initial statuses of (0.02, 0.09, 0.15, 0.20, 0.54) (random).
Figure 6.
The consensus of five agents by SSQO by SM and DSM for initial statuses of (0.02, 0.09, 0.15, 0.20, 0.54) (random).

Figure 7.
The consensus of 10 agents by SSQO by SM and DSM with random initial statuses.

Figure 8.
The consensus of 100 agents by SSQO by SM and DSM with random initial statuses.

Figure 9.
The Disagreement Cases of DeGroot, CSQO, DSQO, and EDSQO as compared to SSQO for three agents in one time for three agents in different random initial statuses.
Figure 9.
The Disagreement Cases of DeGroot, CSQO, DSQO, and EDSQO as compared to SSQO for three agents in one time for three agents in different random initial statuses.

Figure 10.
The Disagreement Cases of DeGroot, CSQO, DSQO, and EDSQO as compared to SSQO for three agents in 10 times for three agents in different random initial statuses.
Figure 10.
The Disagreement Cases of DeGroot, CSQO, DSQO, and EDSQO as compared to SSQO for three agents in 10 times for three agents in different random initial statuses.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Evaluation of SSQO with DeGroot, CSQO, DSQO, and EDSQO consensus.
| Name | Advantages | Disadvantages | Evolutionary Operators | Transition Matrix | |
|---|---|---|---|---|---|
| 1 | DeGroot [63] |
|
| ||
| 2 | CSQO [18] |
|
| ||
| 3 | DSQO [2] |
|
| ||
| 4 | EDSQO [54] |
|
| ||
| 5 | SSQO proposed model |
|
| . |
Table 2.
Description of the cases of the transition matrix for DeGroot, CSQO, DSQO, and EDSQO that cannot reach to consensus with advantaged proposed model SSQO.
Table 2.
Description of the cases of the transition matrix for DeGroot, CSQO, DSQO, and EDSQO that cannot reach to consensus with advantaged proposed model SSQO.
| Name | Advantages | Disadvantages | |
|---|---|---|---|
| 1 | DeGroot [63] | This is a transition matrix under the rules of the DeGroot linear consensus model, which is the drawback that cannot reach to consensus. | |
| 2 | CSQO [18] | , , | This is a transition matrix under the rules of the CSQO non-linear consensus model, which is the drawback that cannot reach to consensus. |
| 3 | DSQO [2] | , , | This is a transition matrix under the rules of the DSQO non-linear consensus model, which is the drawback that cannot reach to consensus. |
| 4 | EDSQO [54] | , , | This is a transition matrix under the rules of the EDSQO non-linear consensus model, which is the drawback that cannot reach to consensus. |
| 5 | SSQO proposed model | , , | This is a transition matrix under the rules of the proposed SSQO non-linear consensus model, which avoids the drawback that cannot reach to consensus. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Abdulghafor, R.; Almotairi, S. A Fast Non-Linear Symmetry Approach for Guaranteed Consensus in Network of Multi-Agent Systems. Symmetry 2020, 12, 1692. https://doi.org/10.3390/sym12101692
AMA Style
Abdulghafor R, Almotairi S. A Fast Non-Linear Symmetry Approach for Guaranteed Consensus in Network of Multi-Agent Systems. Symmetry. 2020; 12(10):1692. https://doi.org/10.3390/sym12101692
Chicago/Turabian StyleAbdulghafor, Rawad, and Sultan Almotairi. 2020. "A Fast Non-Linear Symmetry Approach for Guaranteed Consensus in Network of Multi-Agent Systems" Symmetry 12, no. 10: 1692. https://doi.org/10.3390/sym12101692
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.