The performance of the proposed deep LSTM network-based decision support system was evaluated on the available sensors dataset [
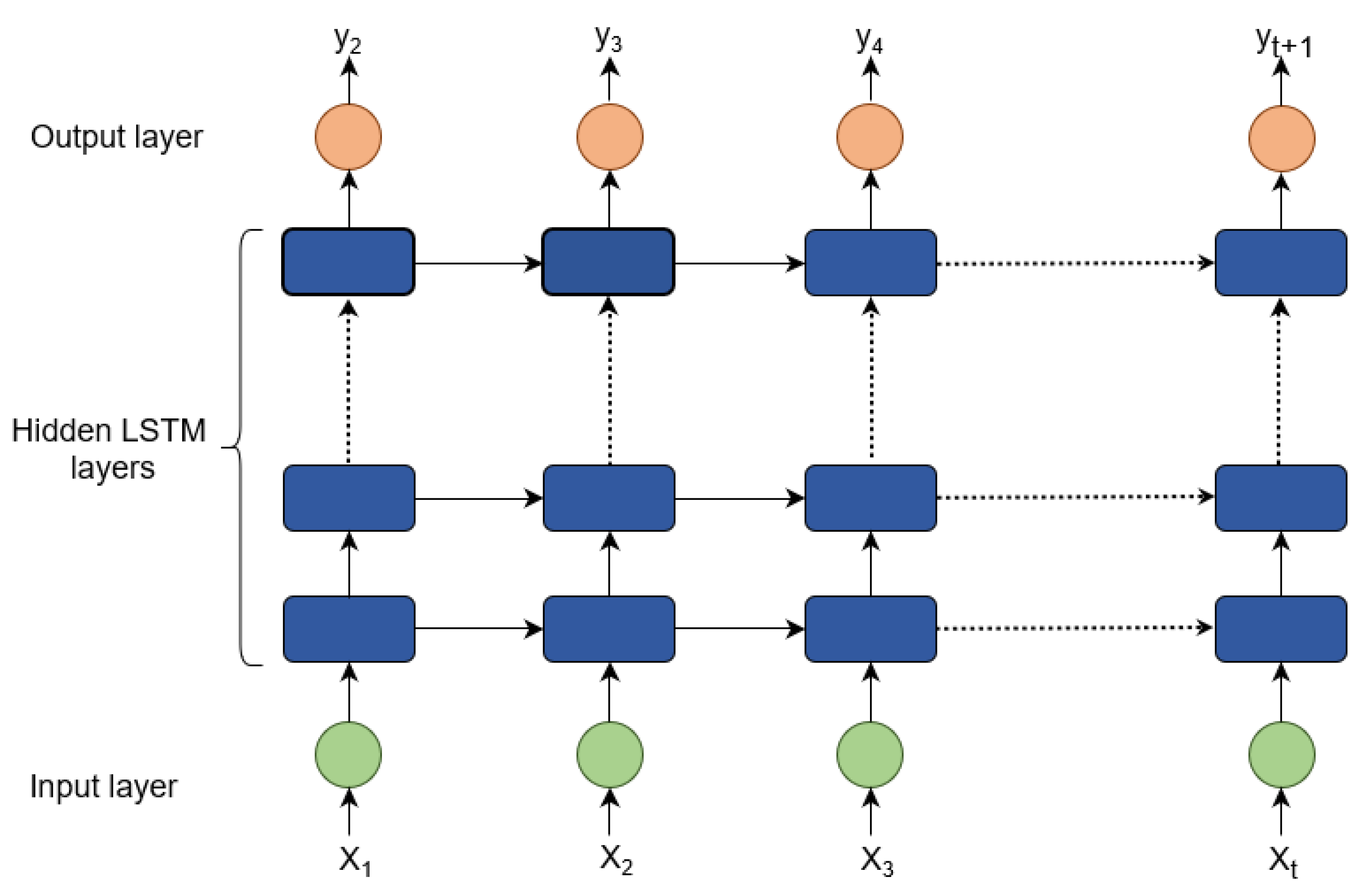
29]. Three different experiments have been performed which are parking location wise, day wise and hour wise. In the parking location wise experiments, the system predicts the availability of free parking space at different parking lots in a given time. In the day wise experiments, the system predicts the parking lots occupancy on seven days from Friday to Thursday. Finally, it predicts the hourly parking lots occupancy from 08:00 a.m. to 05:00 p.m. We have used 70% data for deep LSTM network training and the remaining 30% for testing purposes. Then 20% out of the training set is used for validation and the remaining used for the training purpose. The experiments are performed on the whole dataset as well as on each parking lot individually. The results achieved using all samples demonstrate the overall availability of parking space in the whole city. Whereas, the experiments performed using samples of individual parking locations demonstrate the availability of parking space at a specific parking lot at a given time. In other words, the overall results provide a general overview of parking space availability, and the parking location-wise results provide information about the availability of parking space at a specific parking lot. For the experimental purpose, we implemented the algorithms using the most famous deep learning framework Keras. We applied a deep LSTM network to predict the availability of car parking slots at a specific location, at a given time and on a specific day.
4.1. Parking Location Wise Parking Space Occupancy
Table 1 demonstrates the experimental results on the overall dataset and 30 parking lots individually. It illustrates the performance of proposed deep LSTM with performance evaluation measures: RMSE, MAE, MSE, MdAE, and MSLE. The overall performance of deep LSTM is 0.068, 0.0411, 0.0046, 0.028, and 0.002 with RMSE, MAE, MSE, MdAE, and MSLE, respectively. From these results we can analyze that prediction accuracy of the proposed decision support system is 93.2%, 95.9%, 99.6%, 97.2%, and 99.8% respectively with five measures. The values presented in
Table 3 demonstrate the reliability of the proposed decision support system. In general, from all performance measurement parameters, the minimum prediction accuracy is 93.2% (RMSE) and the maximum prediction accuracy is 99.8% (MSLE).
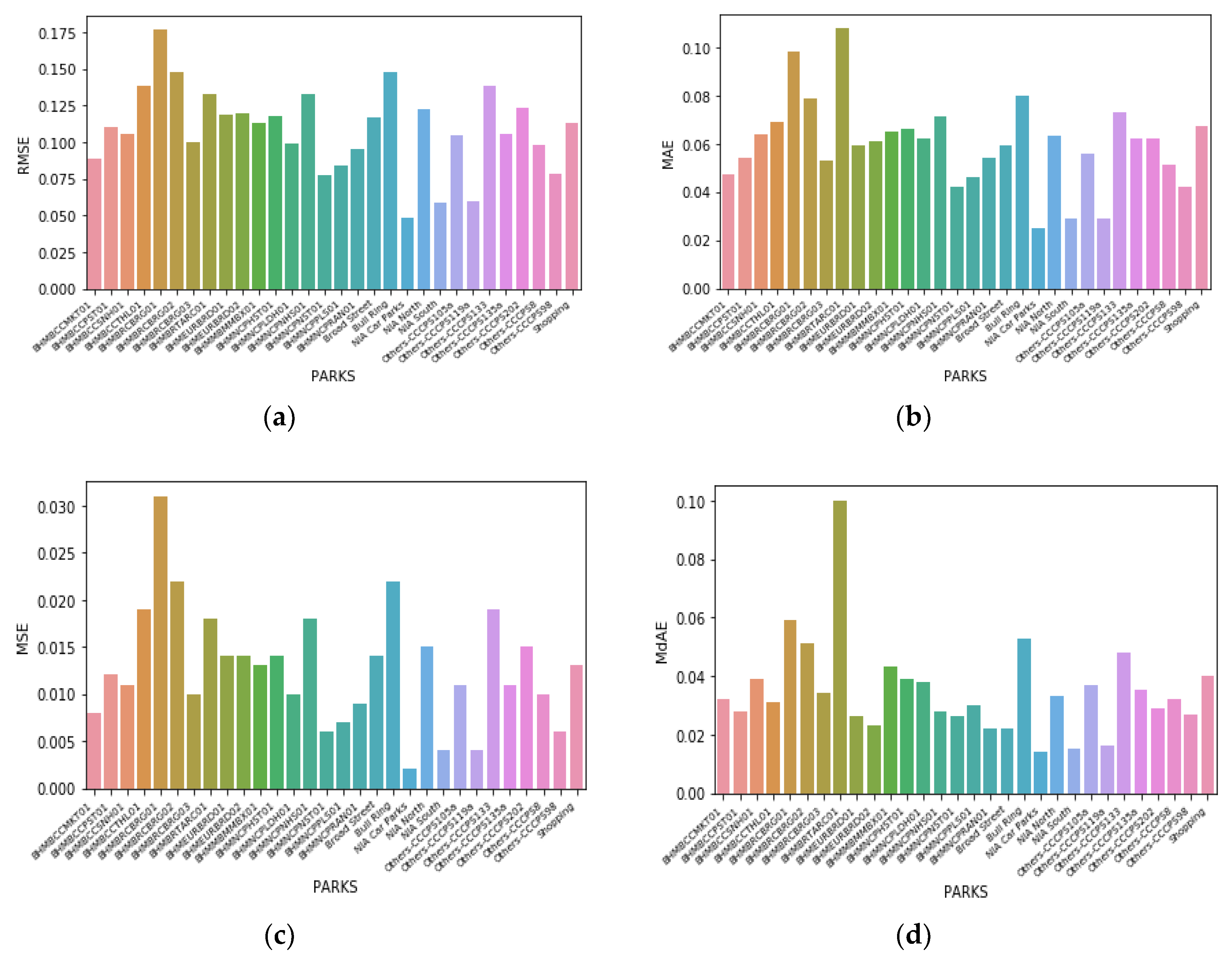
By analyzing the performance of the proposed decision support system on individual parking slots we can notice that the average, maximum, minimum, and standard deviation with RMSE is 0.109, 0.177, 0.048, and 0.028, respectively. Similarly, the average, maximum, minimum, and standard deviation with MSLE are 0.006, 0.016, 0.002, and 0.003, respectively. In the computation of average, maximum, minimum, and standard deviation the overall results are not considered.
While comparing the five loss functions RMSE, MAE, MSE, MdAE, and MSLE, the experimental results demonstrate that MSLE gives the lowest mean value as compare to other four-loss functions. Next to MSLE, MSE gives the minimum mean value as compare to the other three-loss functions. On the other hand, RSME gives the highest mean value. We can say that among the five loss functions, MSLE and MSE are the best performance evaluation techniques.
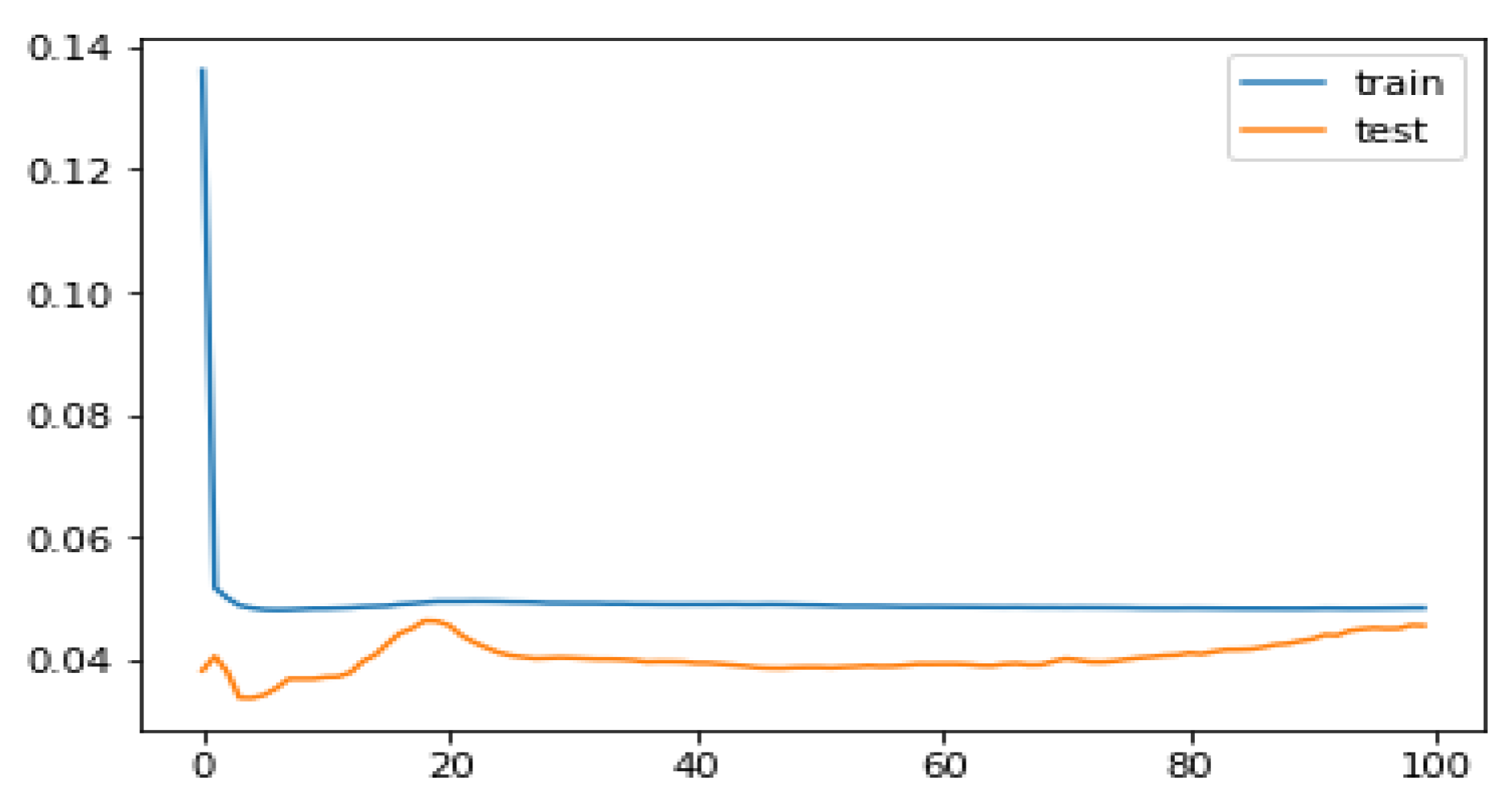
When we applied our models on the whole dataset, we obtained the loss curve presented in
Figure 6. The deep LSTM network achieved a minimum error rate with 100 epochs. In
Figure 6 error rate is represented on the y-axis and epochs are presented on the x-axis. Similarly,
Figure 7 gives a clear idea about the predication variation on each parking location using five loss functions. In the representation of each loss function, the y-axis represents the error rate and the x-axis represents the parking locations. The RMSE, MAE, MSE, MdAE, and MSLE for each park lots are shown as (a) to (e), respectively.
4.2. Day-Wise Parking Space Occupancy
The day-wise prediction was made to facilitate the drivers to check the availability of parking on specific day. First, we divide our dataset intoday-wise and then perform prediction day-wise through proposed model. The results produced by Deep LSTM on day-wise dataset are presented in
Table 4.
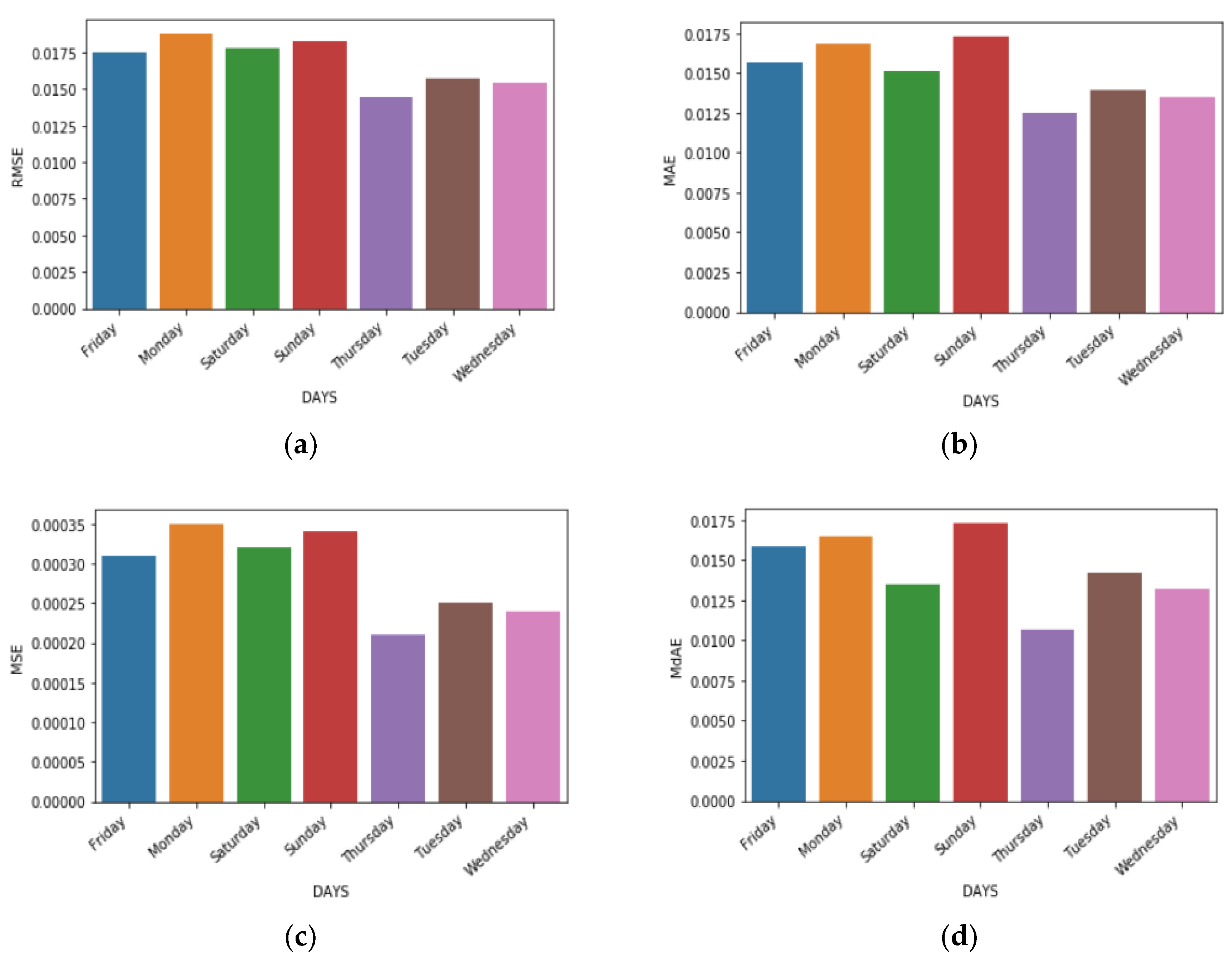
Table 4 demonstrates the experimental results on the day-wise parking space availability. It illustrates the performance of proposed deep LSTM with performance evaluation measures: RMSE, MAE, MSE, MdAE, and MSLE. The day wise MSE of deep LSTM is 0.0168, 0.0139, 0.0135, 0.0125, 0.0157, 0.0151, and 0.0173 for Monday, Tuesday, Wednesday, Thursday, Friday, Saturday, and Sunday, respectively. These values demonstrate the reliability of the proposed decision support system with respect to day-wise parking space availability. It will help the drives to schedule their drive on a specific day of a week. By analyzing the performance of the proposed decision support system on day-wise parking space availability we can notice that prediction variation is very low on the seven days of week as shown in
Figure 8. It clearly shows that result for Saturday and Sunday is not very accurate due to unpredictable situation on these days but on the other days result are more accurate as compare to Saturday and Sunday. In
Figure 8, x-axis represents days and y-axis represents error rate.
4.3. Hour-Wise Parking Space Occupancy
In hour-wise prediction, the dataset is divided into the hours of days whose data is available in Birmingham car park dataset. The data is available from 8:00 a.m. to 4:30 p.m., so dataset is divided into 9 different hours as presented in
Table 5. In
Table 5 demonstrates the results of each hour as shown with respect to performance evaluation techniques.
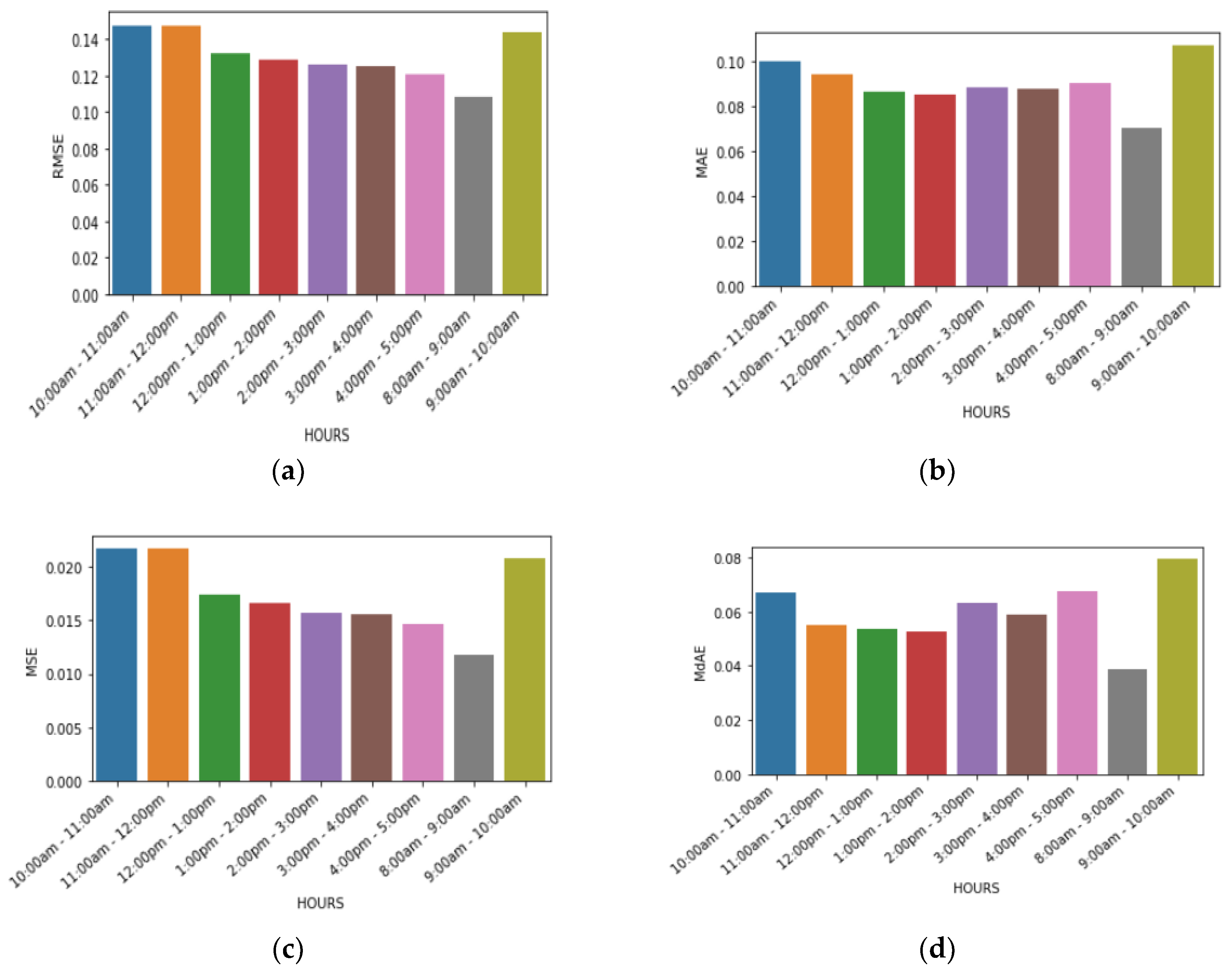
Table 5 demonstrates the experimental results on the hour-wise parking space availability. It illustrates the performance of proposed deep LSTM with performance evaluation measures: RMSE, MAE, MSE, MdAE, and MSLE. The hour-wise MSE of deep LSTM is 0.0698, 0.1071, 0.0999, 0.0937, 0.0861, 0.0848, 0.0881, 0.0875, and 0.0902 for 08:00 a.m. to 05:00 p.m.
These values demonstrate the reliability of the proposed decision support system with respect to hourly parking space availability. It will help the drivers to schedule their drive on a specific hour of a day. By analyzing the performance of the proposed decision support system on hour-wise parking space availability we can notice that there is a little bit of variation in prediction of parking availability accuracy for no hours of a day as shown in
Figure 8. It represents that the performance of proposed decision support system is significant for all hourly slots except three hourly slots from 09:00 a.m.–10:00 a.m., 10:00 a.m.–11:00 a.m., and 11:00 a.m.–12:00 p.m., whereas, x-axis represents hours and y-axis represents error rate.
In
Figure 9, the results of hour-wise predictions are shown. From
Figure 9 we can notice that the proposed model is more inaccurate on 9:00a.m.–10:00a.m., 10:00a.m.–11:00a.m., and 11:00a.m.–12:00p.m. but on other hour results are well and good. In
Figure 9 x-axis represents hours and y-axis represents error rate.

 ,
, 













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}