Methodology for Indoor Positioning and Landing of an Unmanned Aerial Vehicle in a Smart Manufacturing Plant for Light Part Delivery

 , , and
, , and
Abstract
:1. Introduction and State of the Art
- Provide an affordable indoor localization method for an unmanned aerial vehicle that delivers light parts inside a manufacturing plant.
- Provide an autonomous landing system based on computer vision and affordable equipment that can be onboarded, generalizable for any manufacturing plant.
- Provide an affordable wireless solution within a standard manufacturing plant for UAV messages (location, basic telemetry, and receiving simple commands) to be interchanged with the backend software that manages the delivery flights for these internal operations.
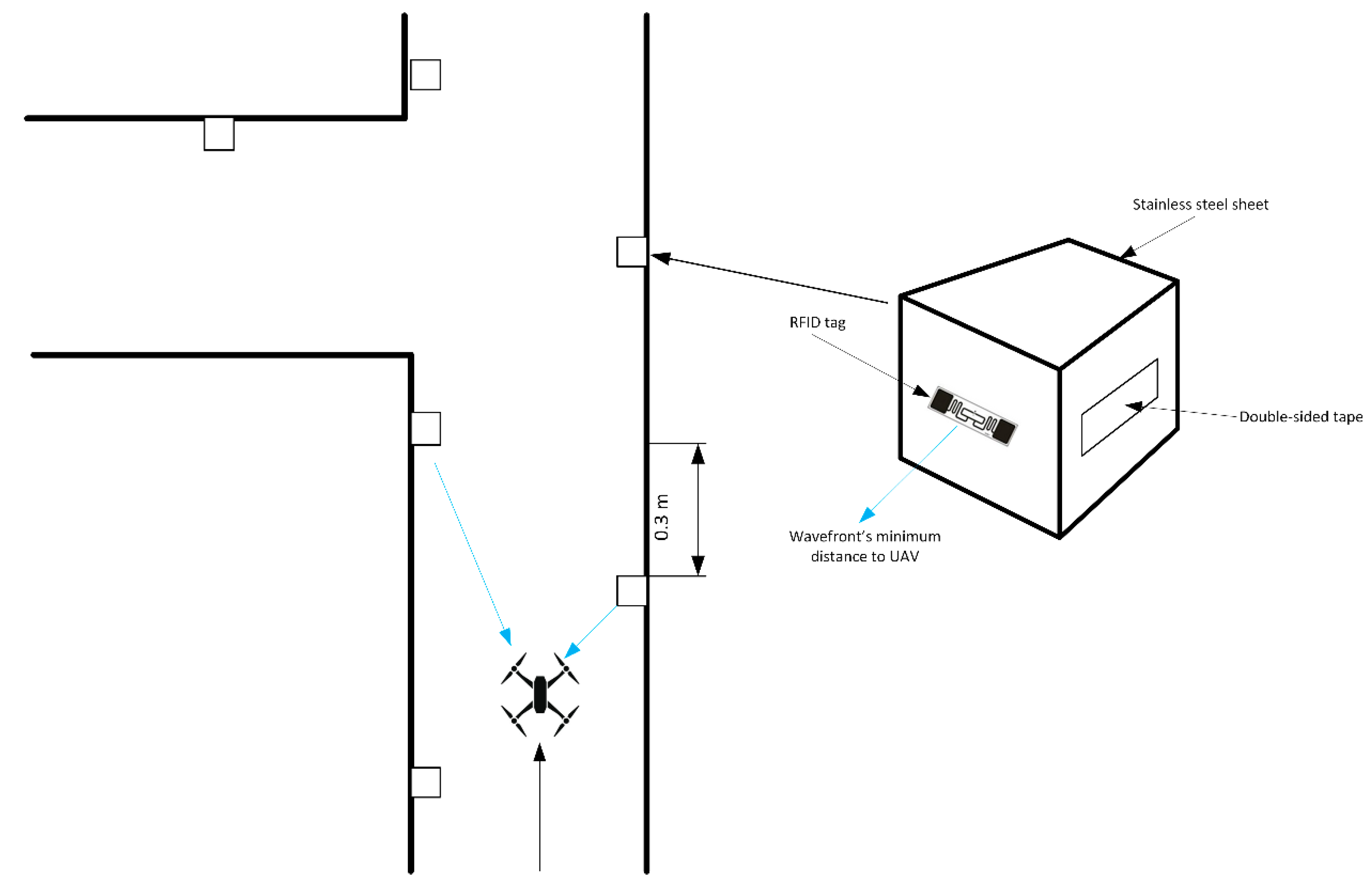
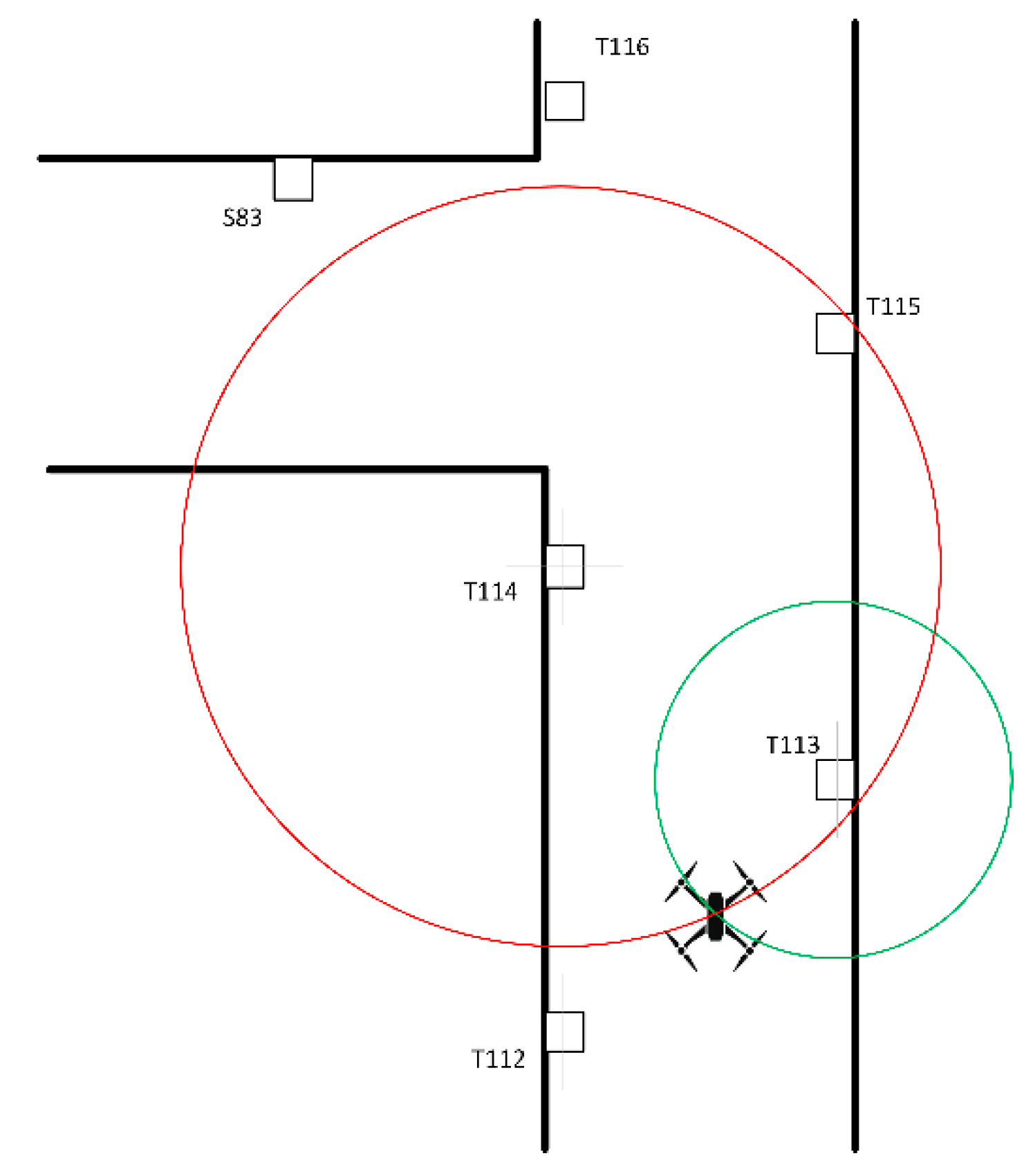
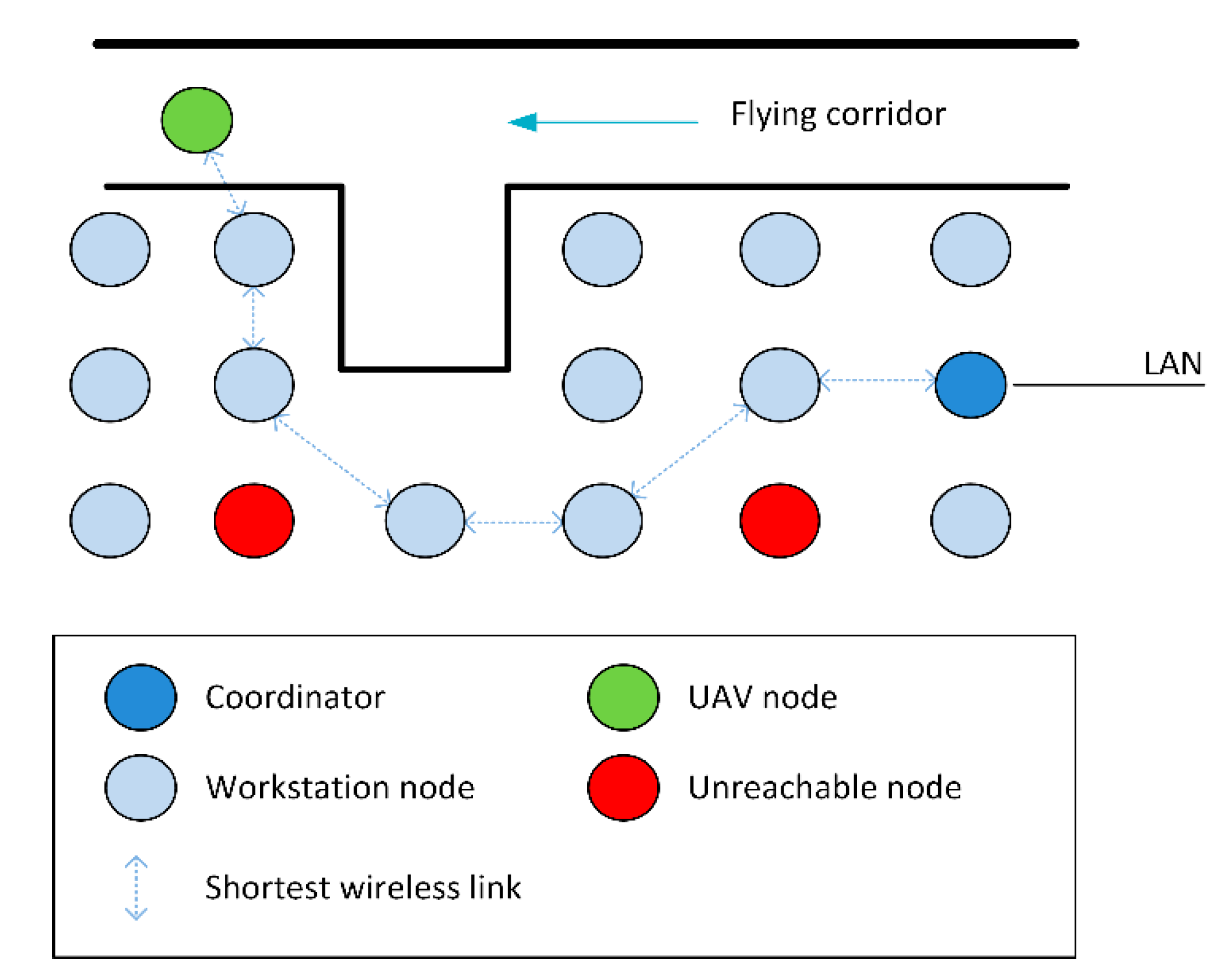
- The positioning system: the utilization of RFID in conjunction with sonar readings from a different point of view (using the RSS values to obtain a coarse location, and the sonar to provide fine trajectory tracking, aided by a specific corridor design).
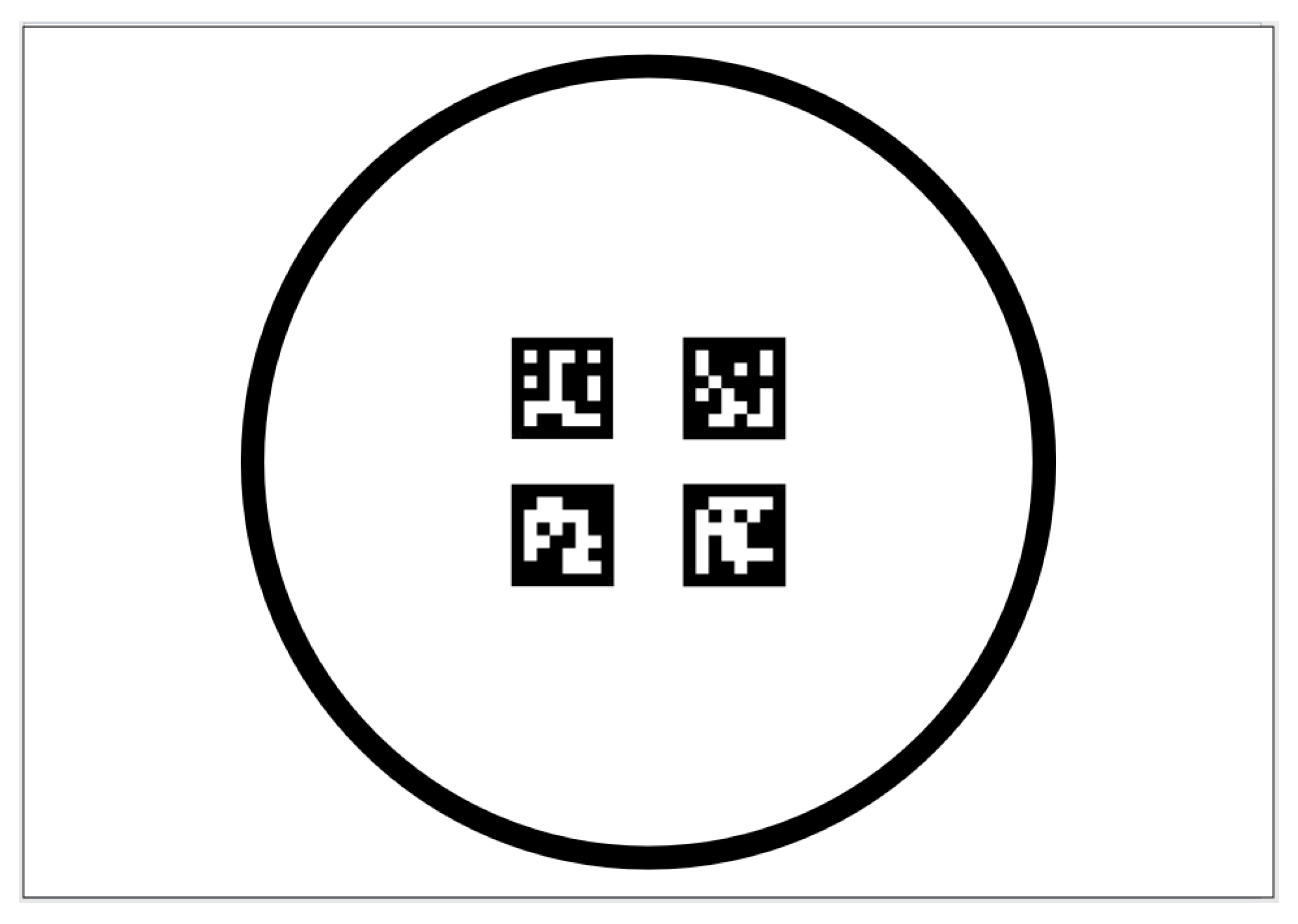
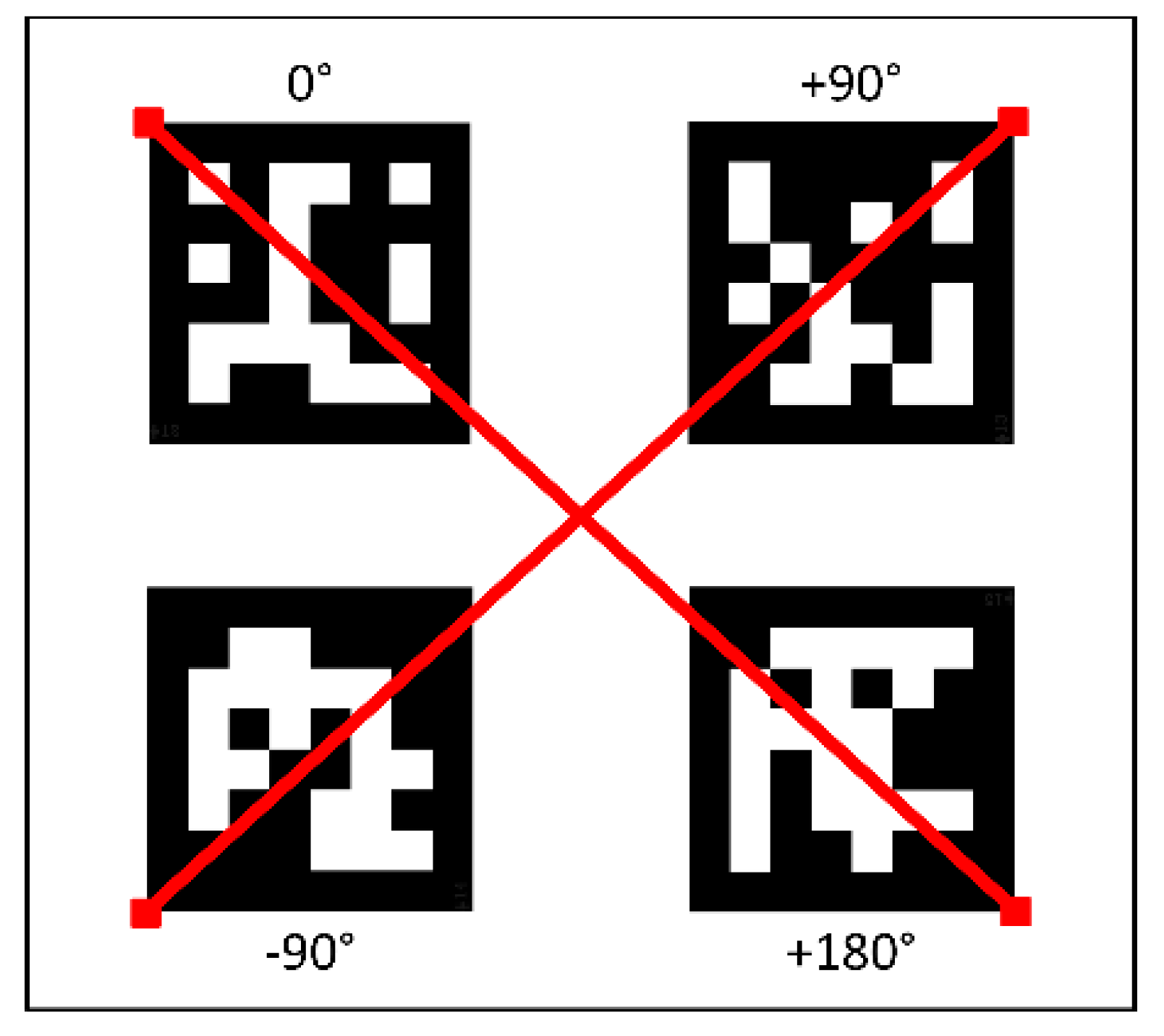
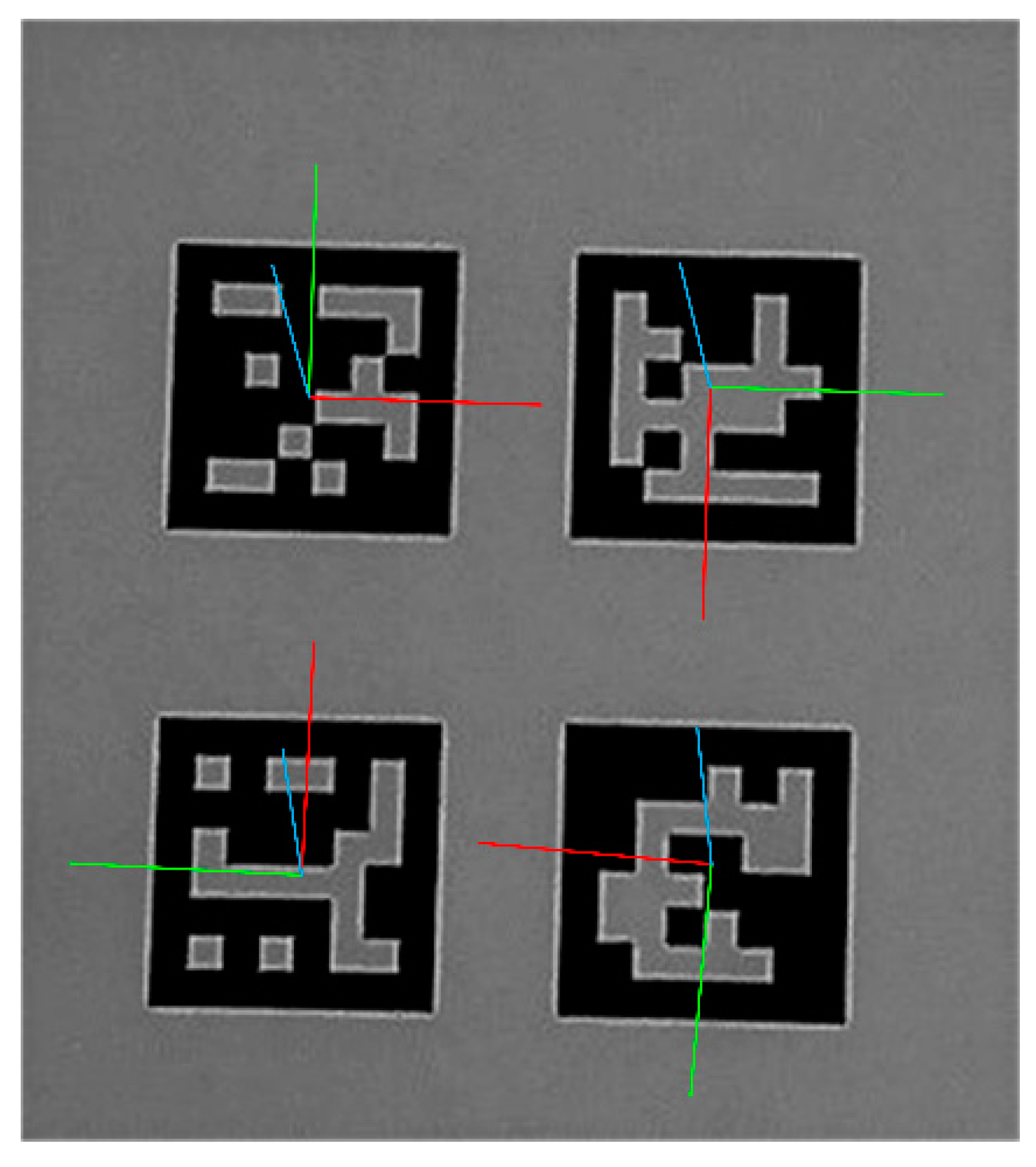
- The landing system: the use of an onboarded camera that locates the right point to begin descent within the flying corridor, and that controls how the UAV descends (the combination of the circle shape for long-range and a special arrangement of four ArUco markers that provide accurate short-range control).
2. Materials and Methods
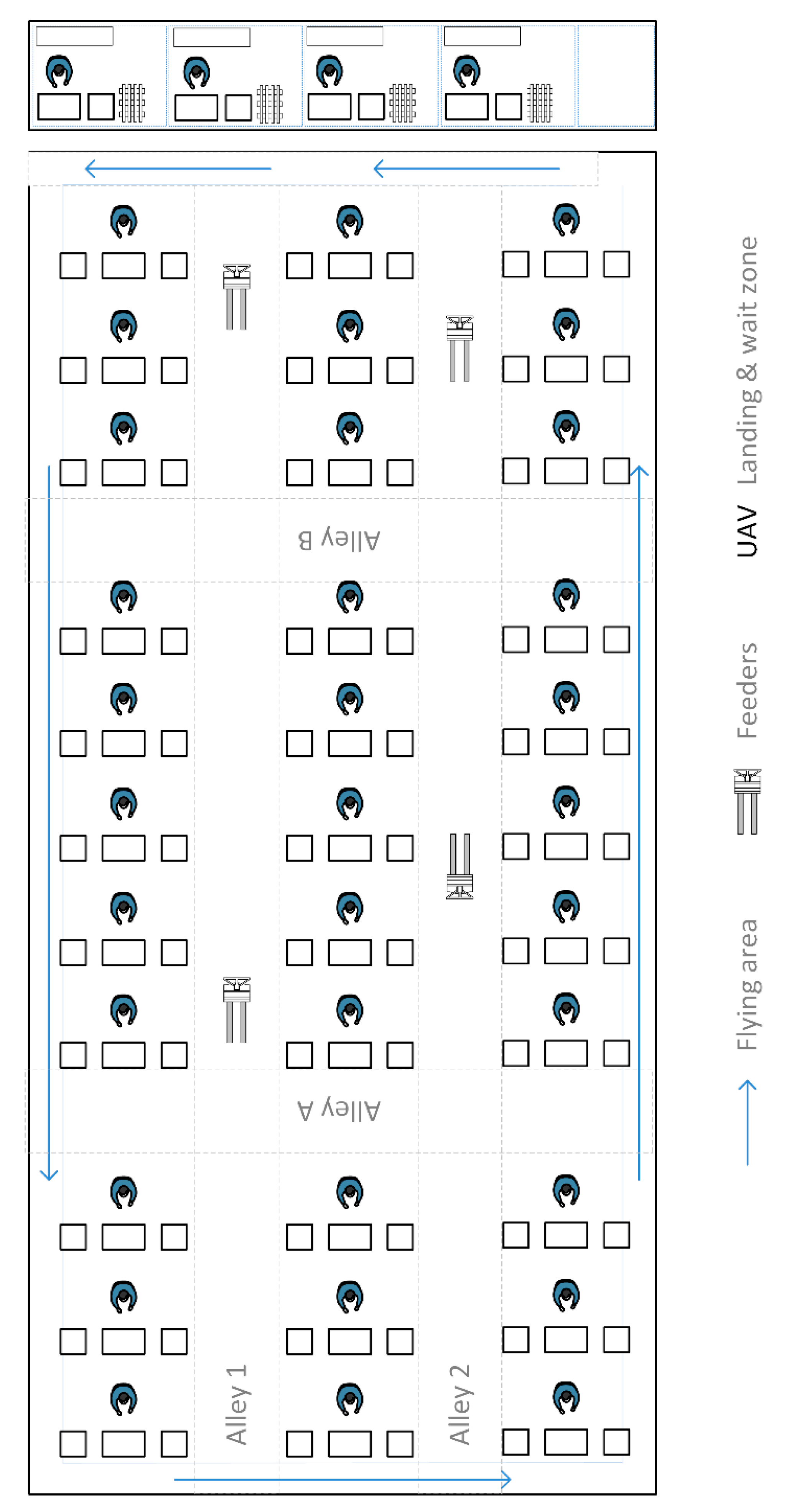
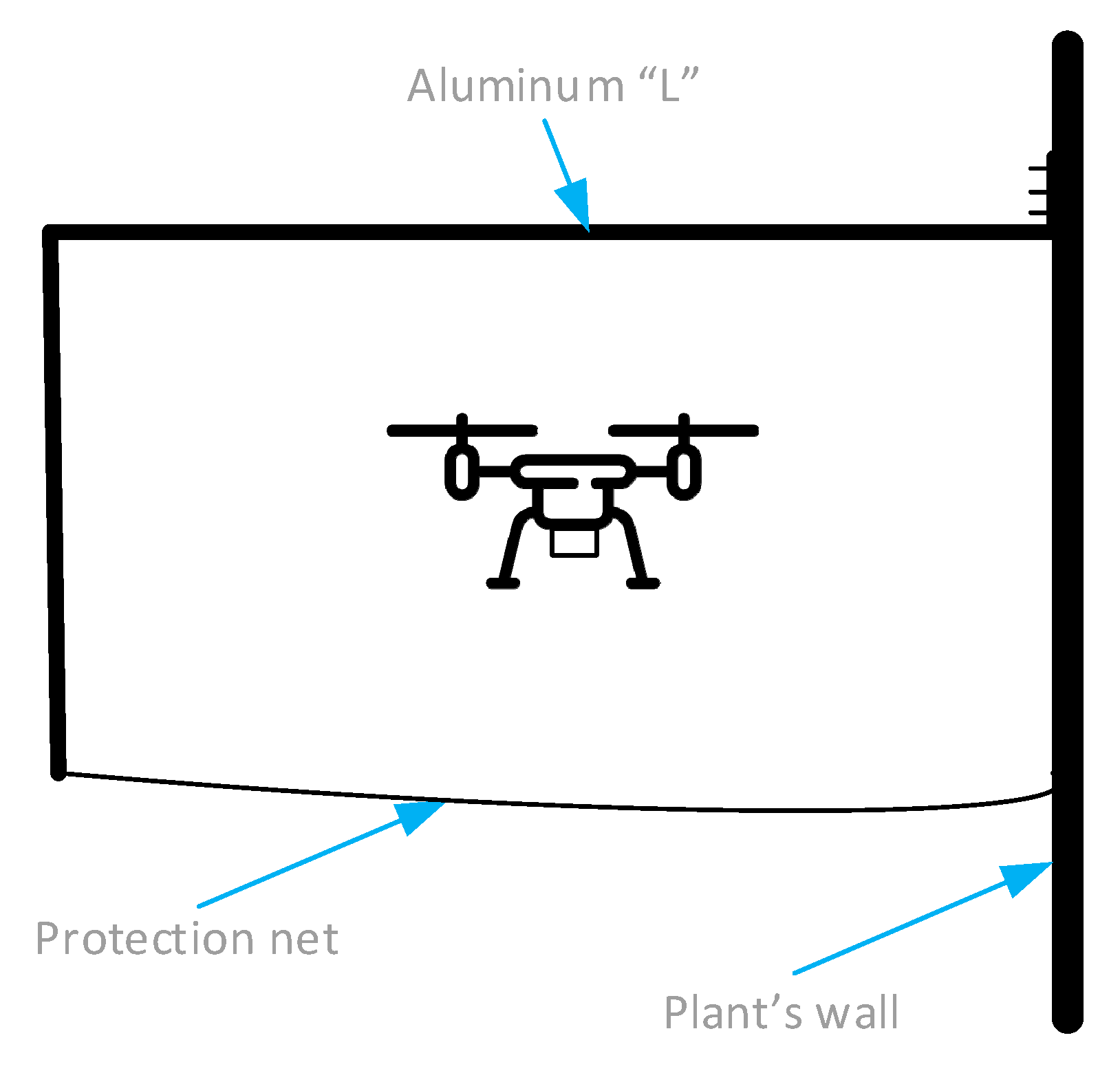
2.1. Environment
2.2. Distance Calculation
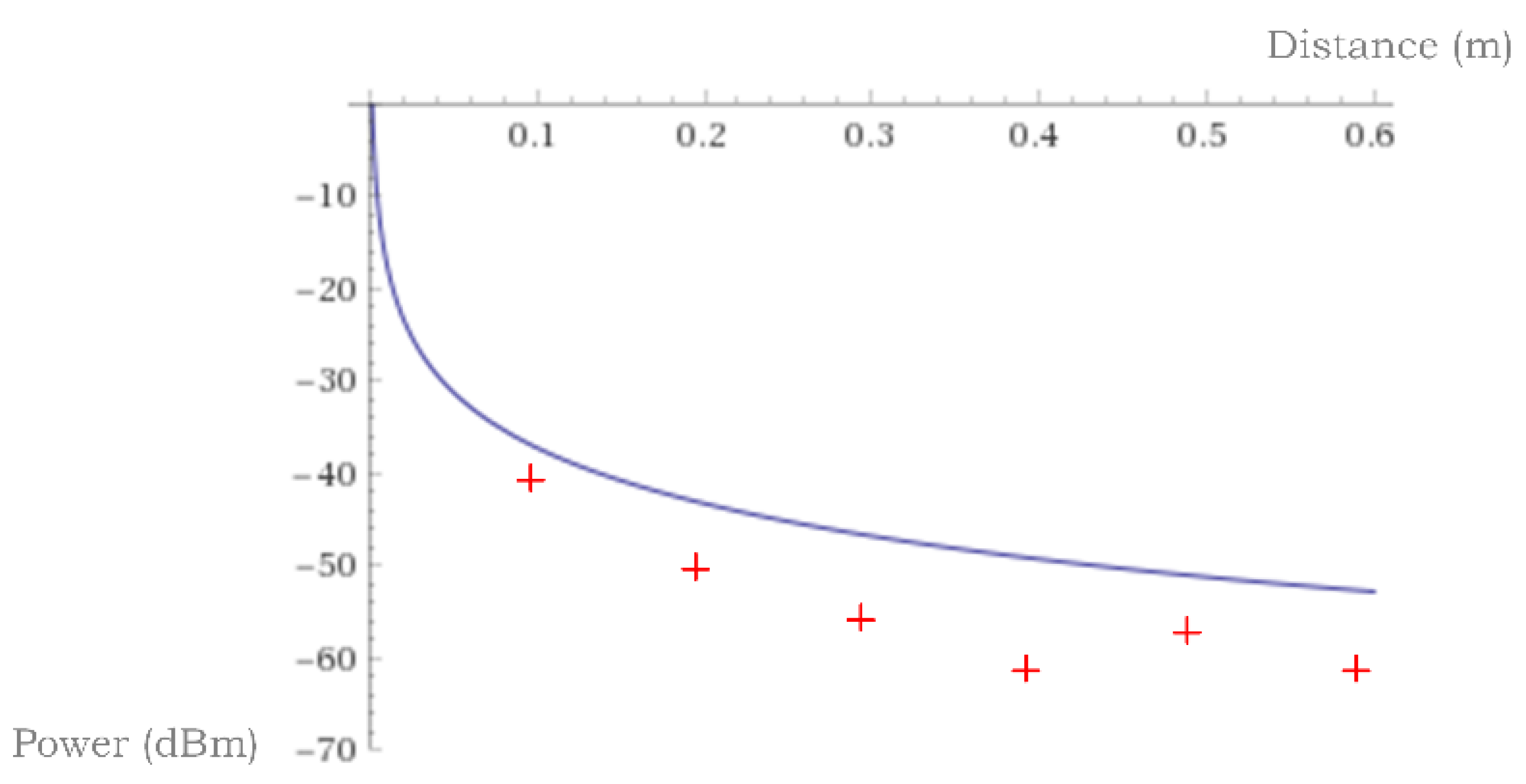
2.2.1. RSS Measurement
2.2.2. Bilateration
2.2.3. Second Measurement
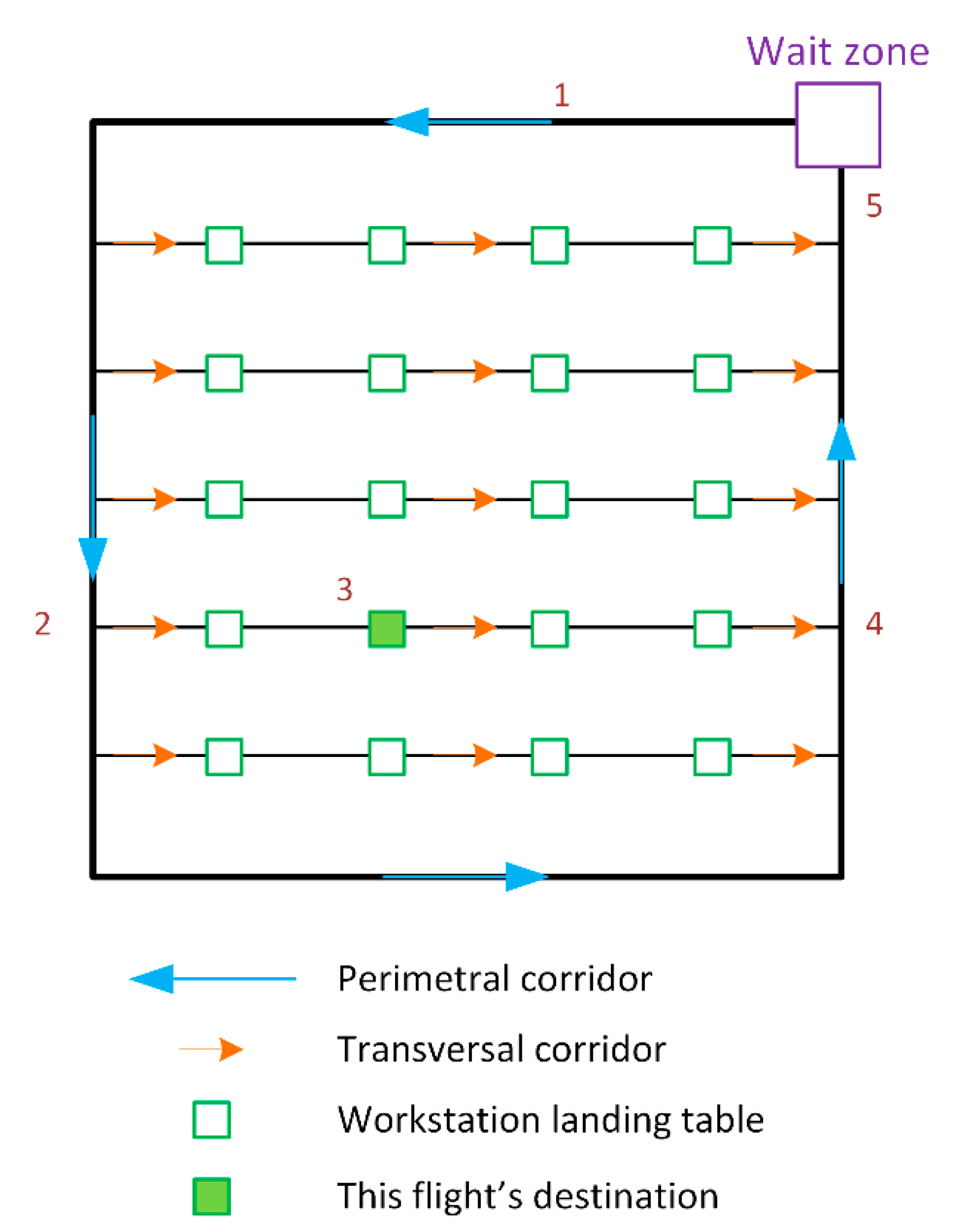
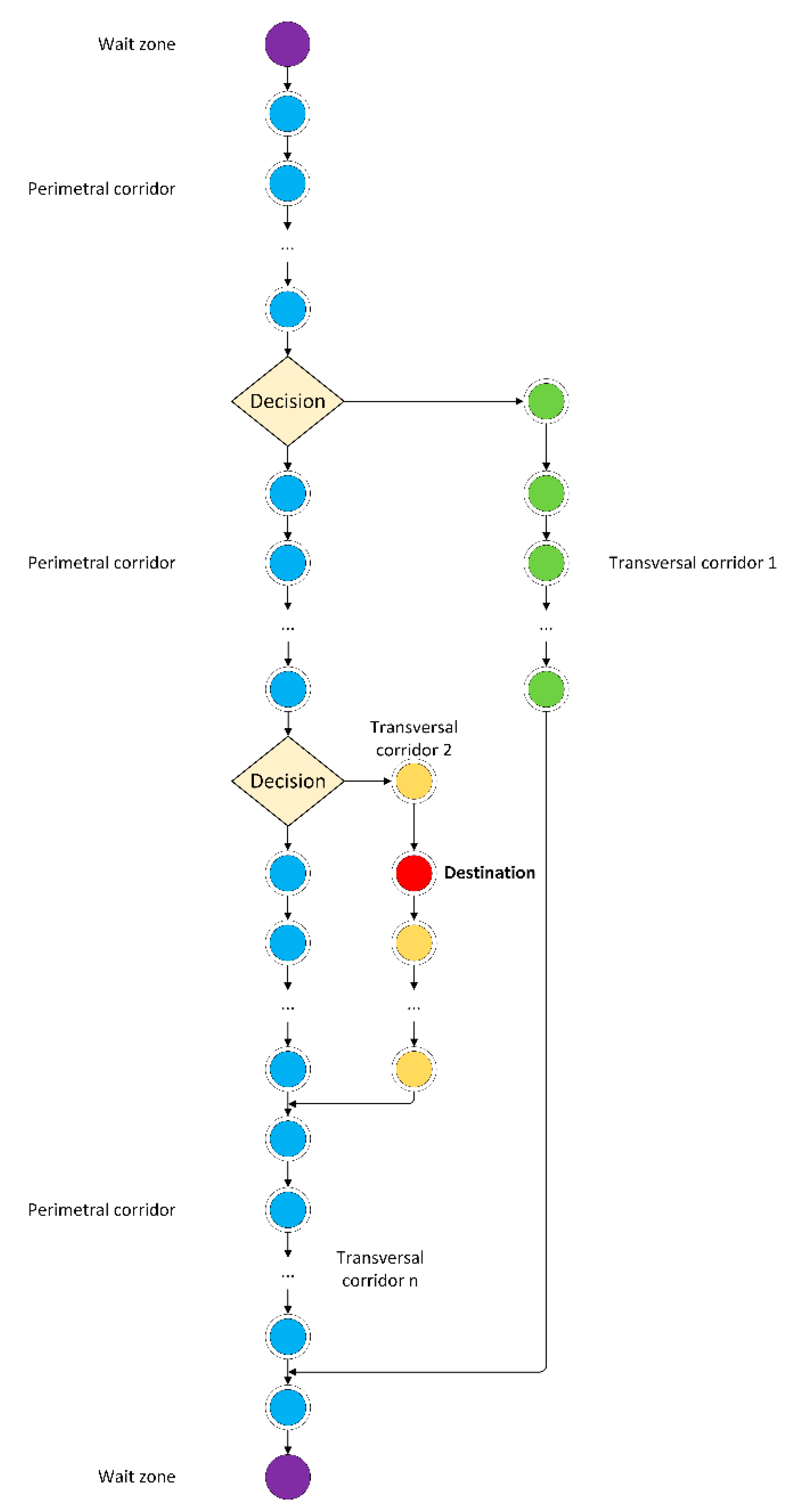
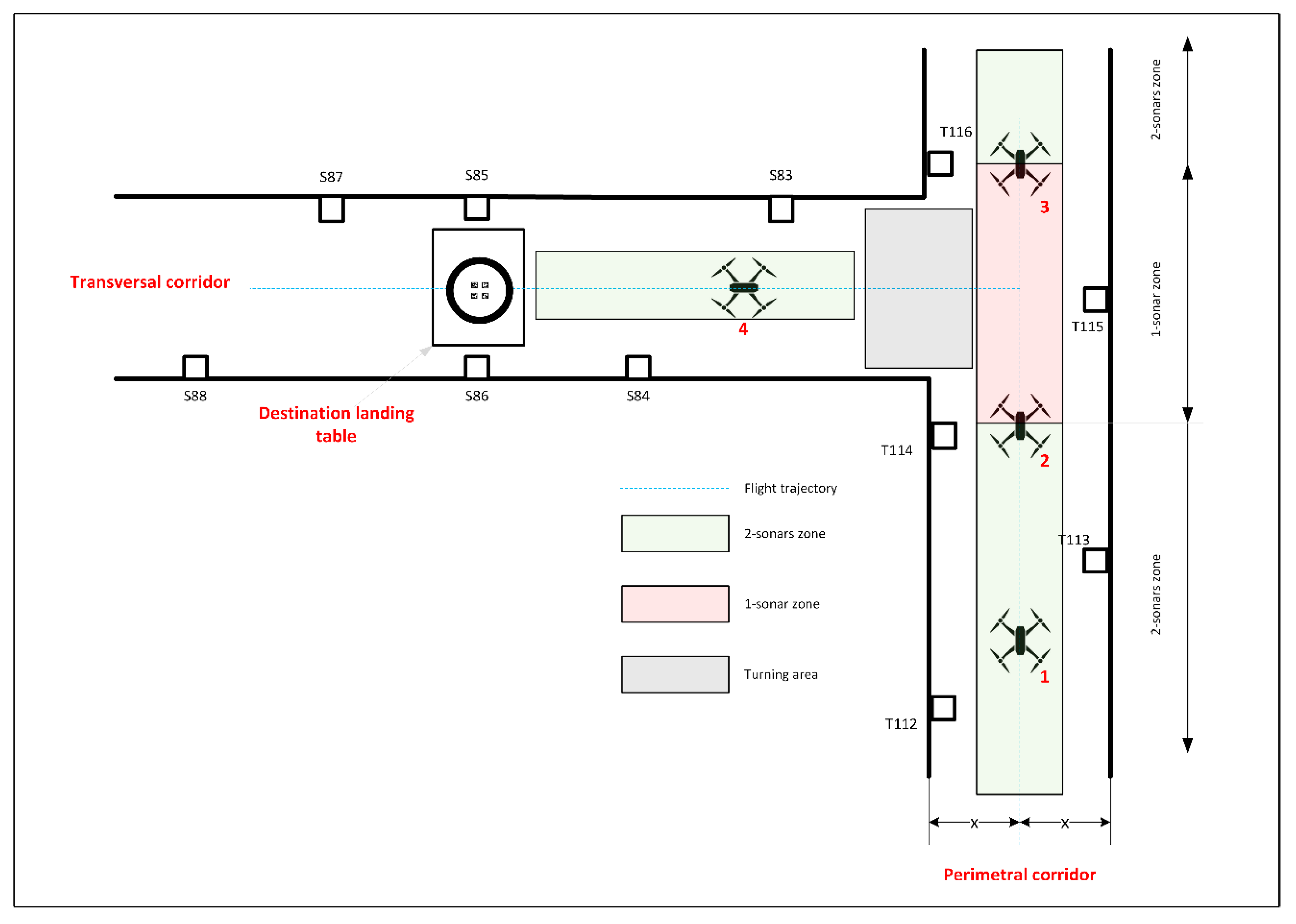
2.2.4. Navigation Algorithm
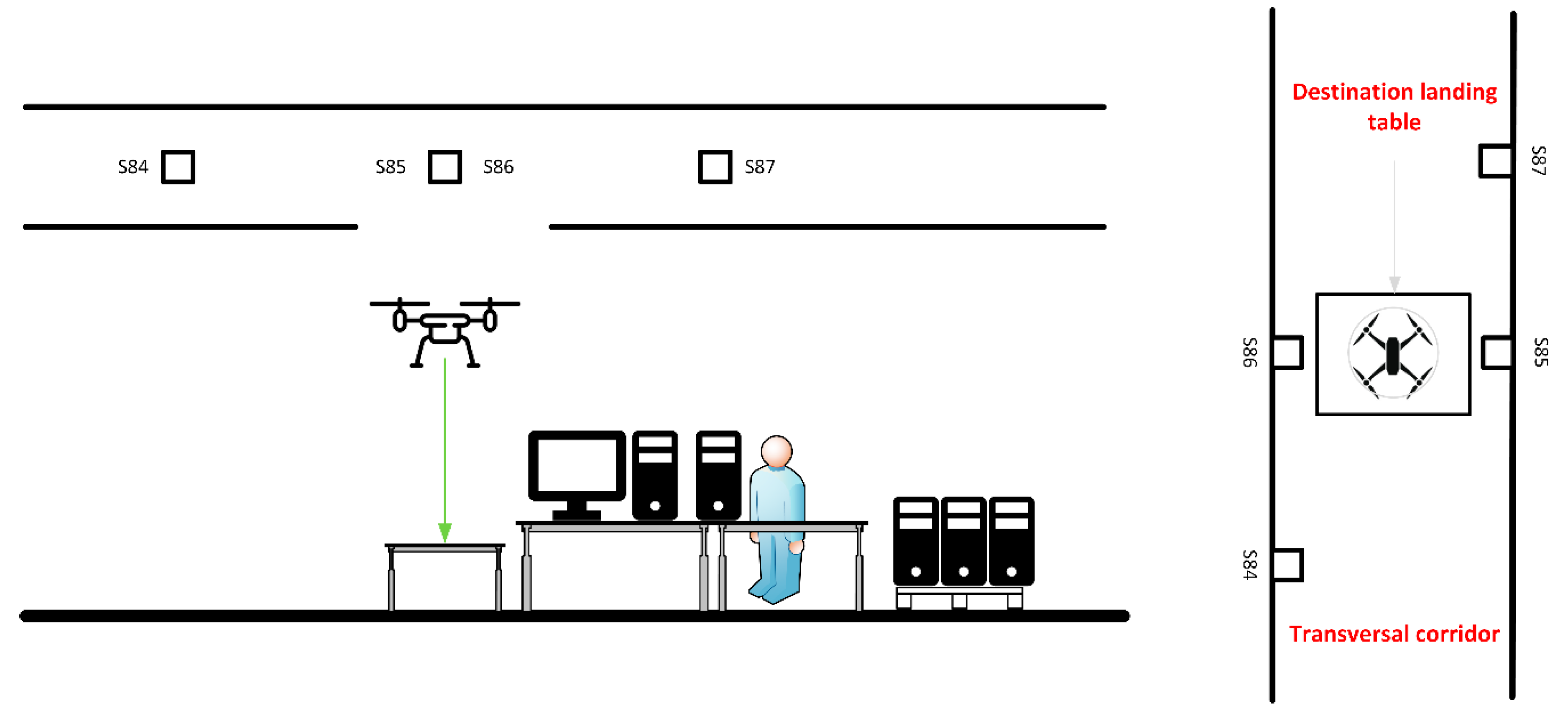
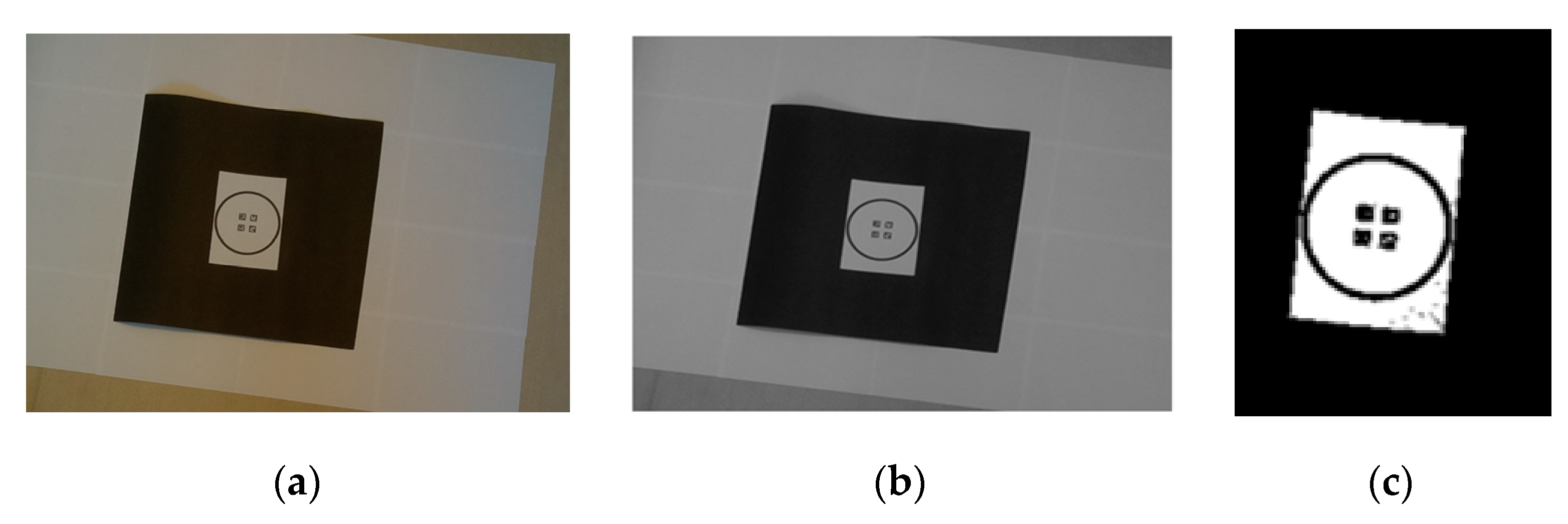
2.2.5. Computer Vision Landing Operation
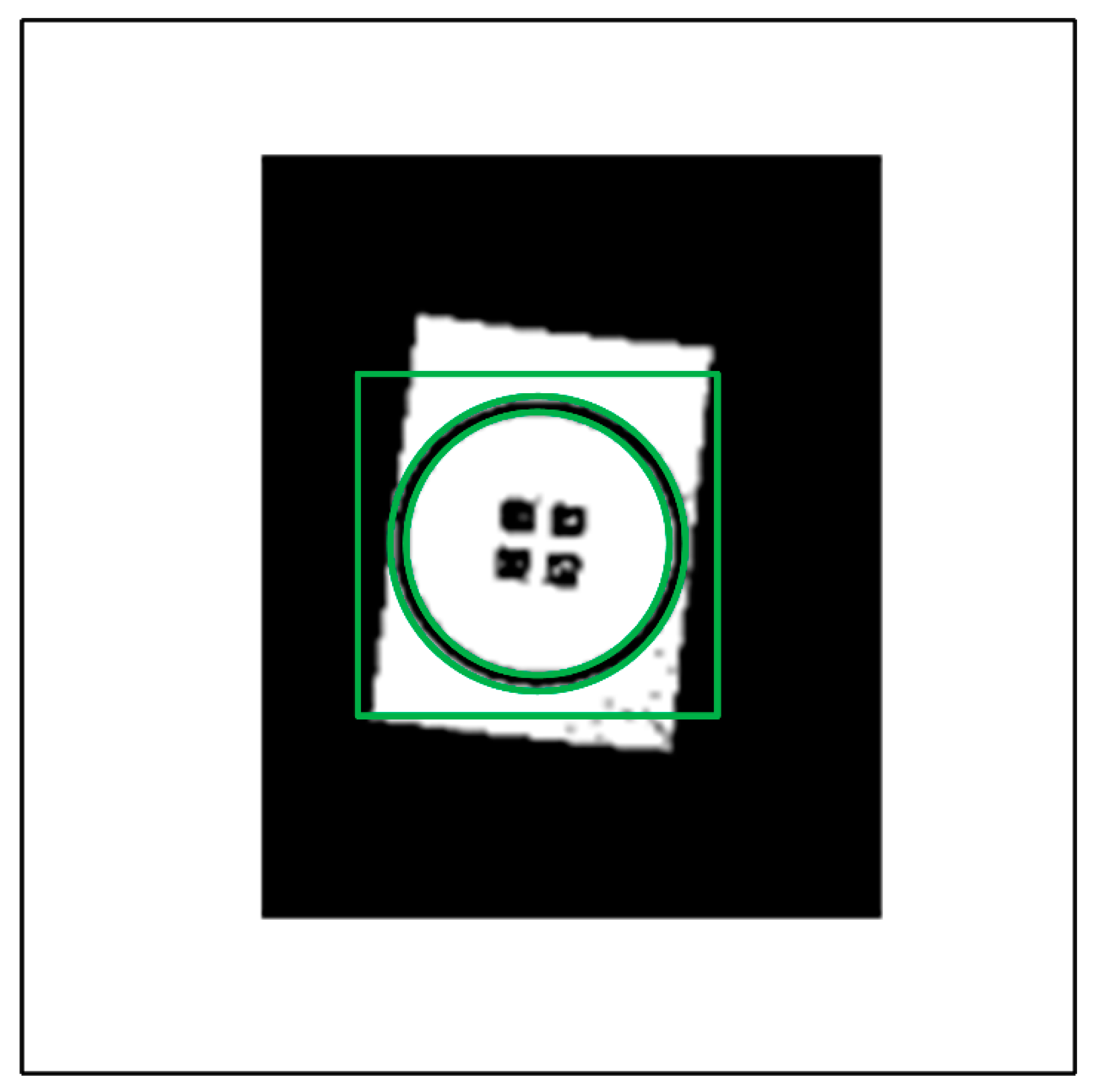
Finding the Opening at the Corridor to Begin Descent
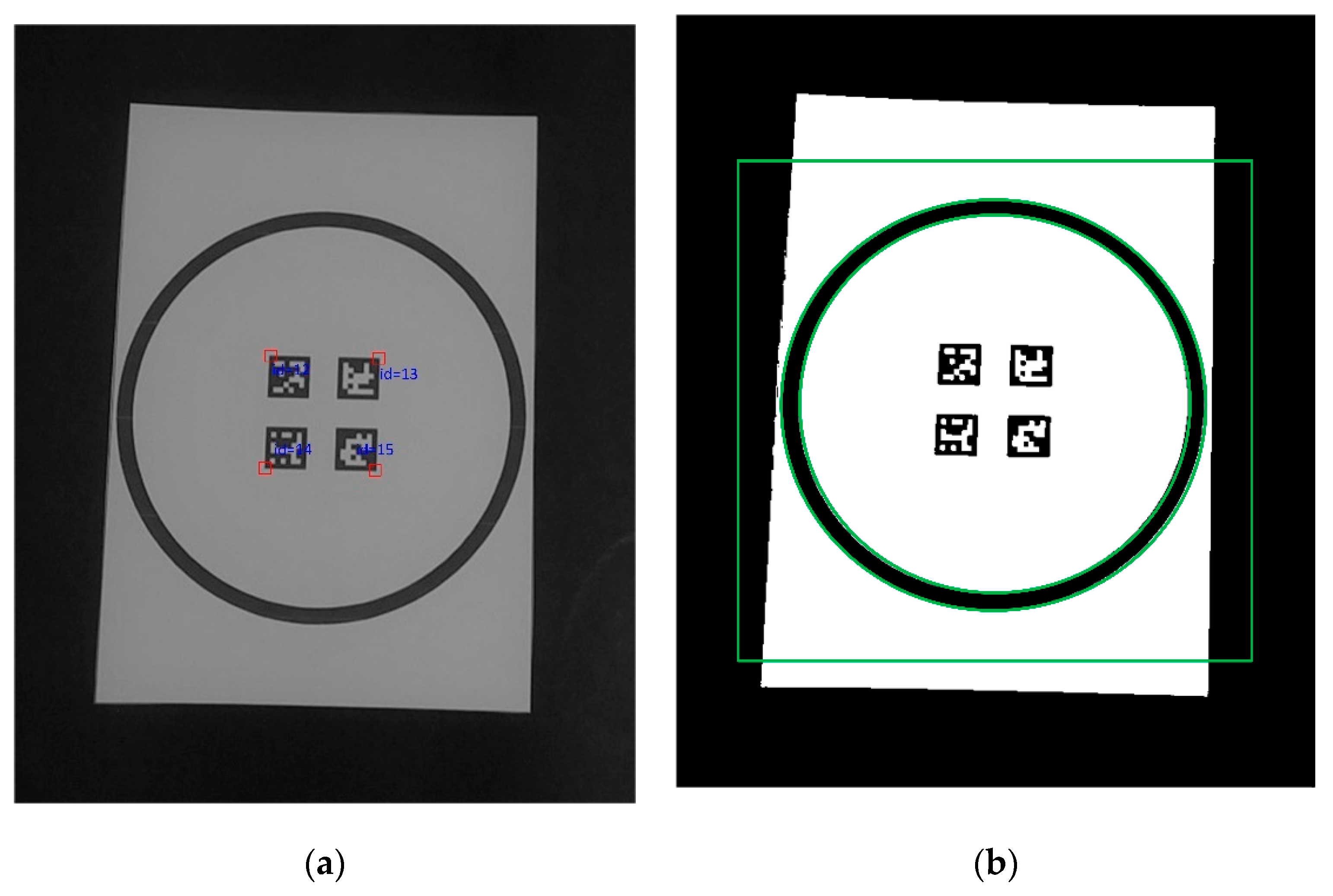
Finding the Short-Range Markers
2.2.6. Communication
2.3. Setup
3. Results and Discussion
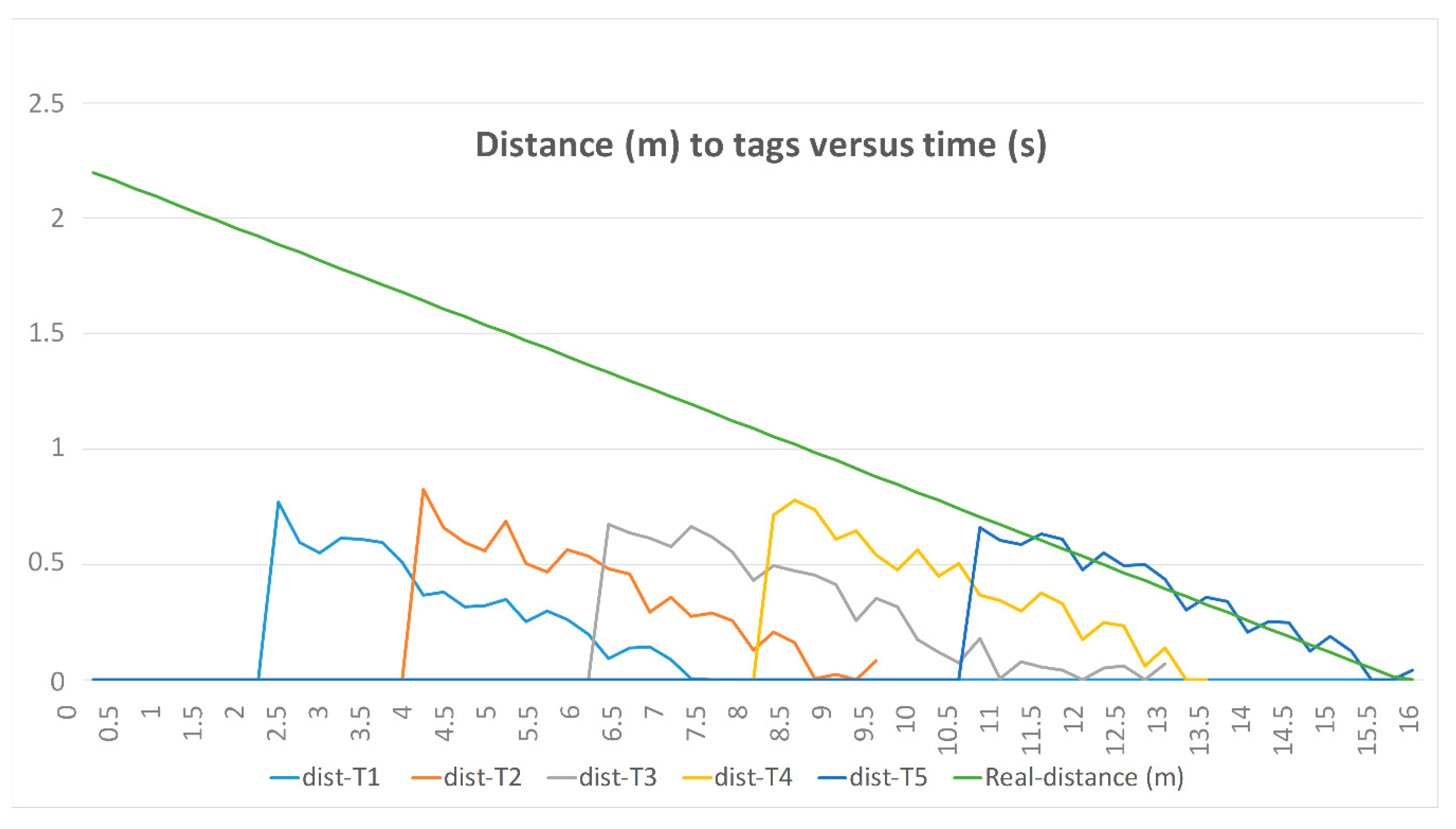
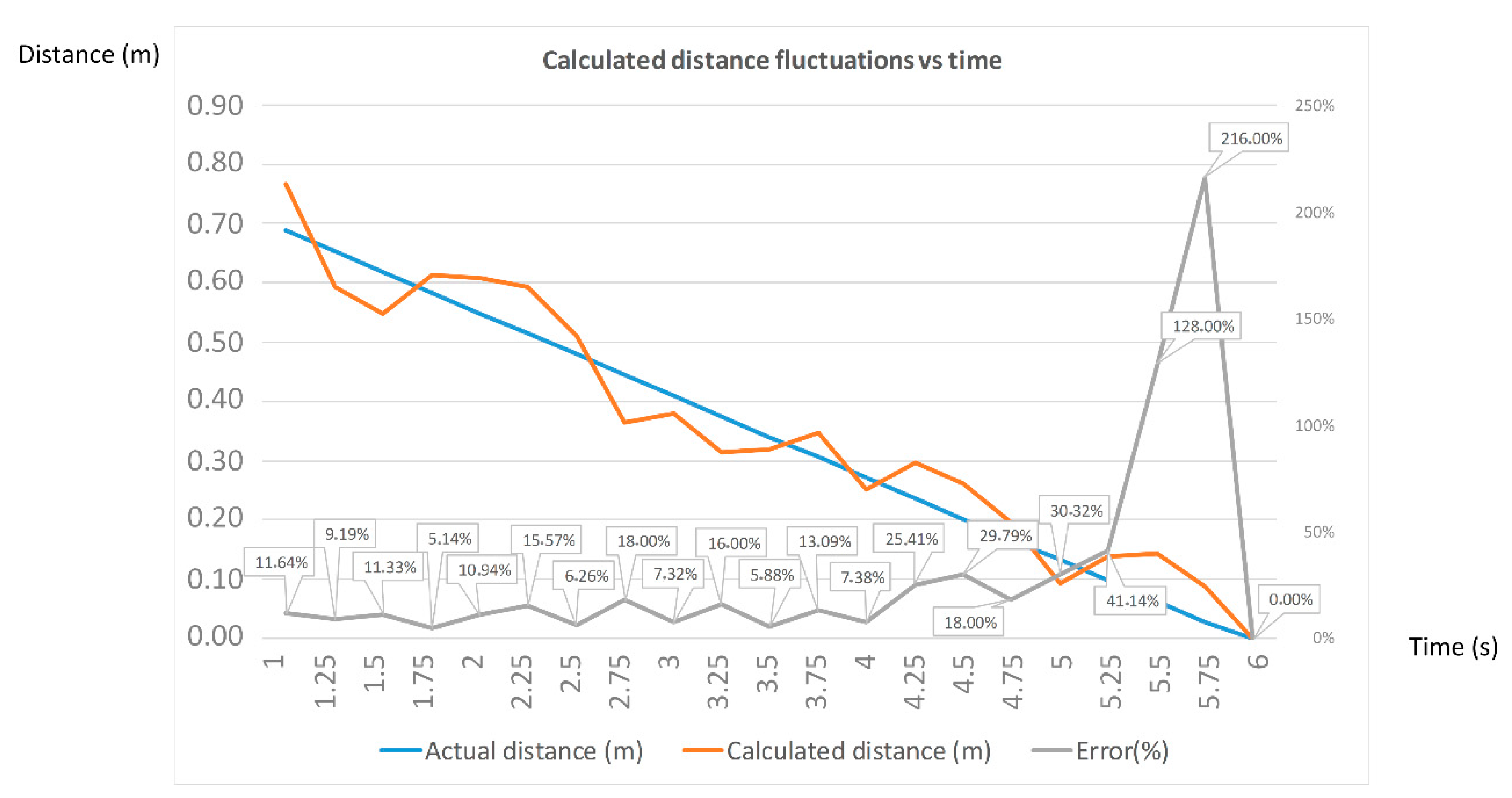
3.1. Positioning System
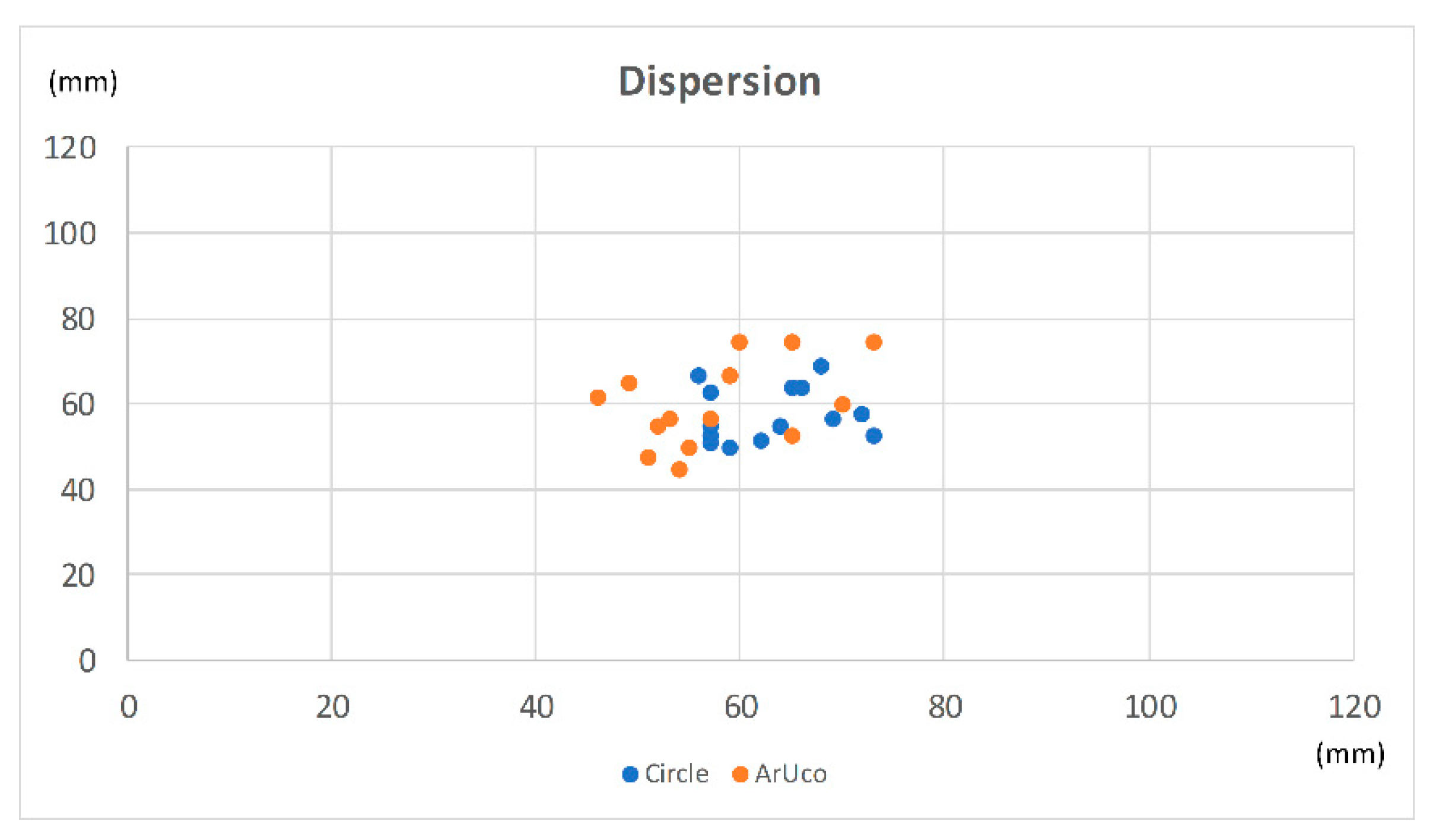
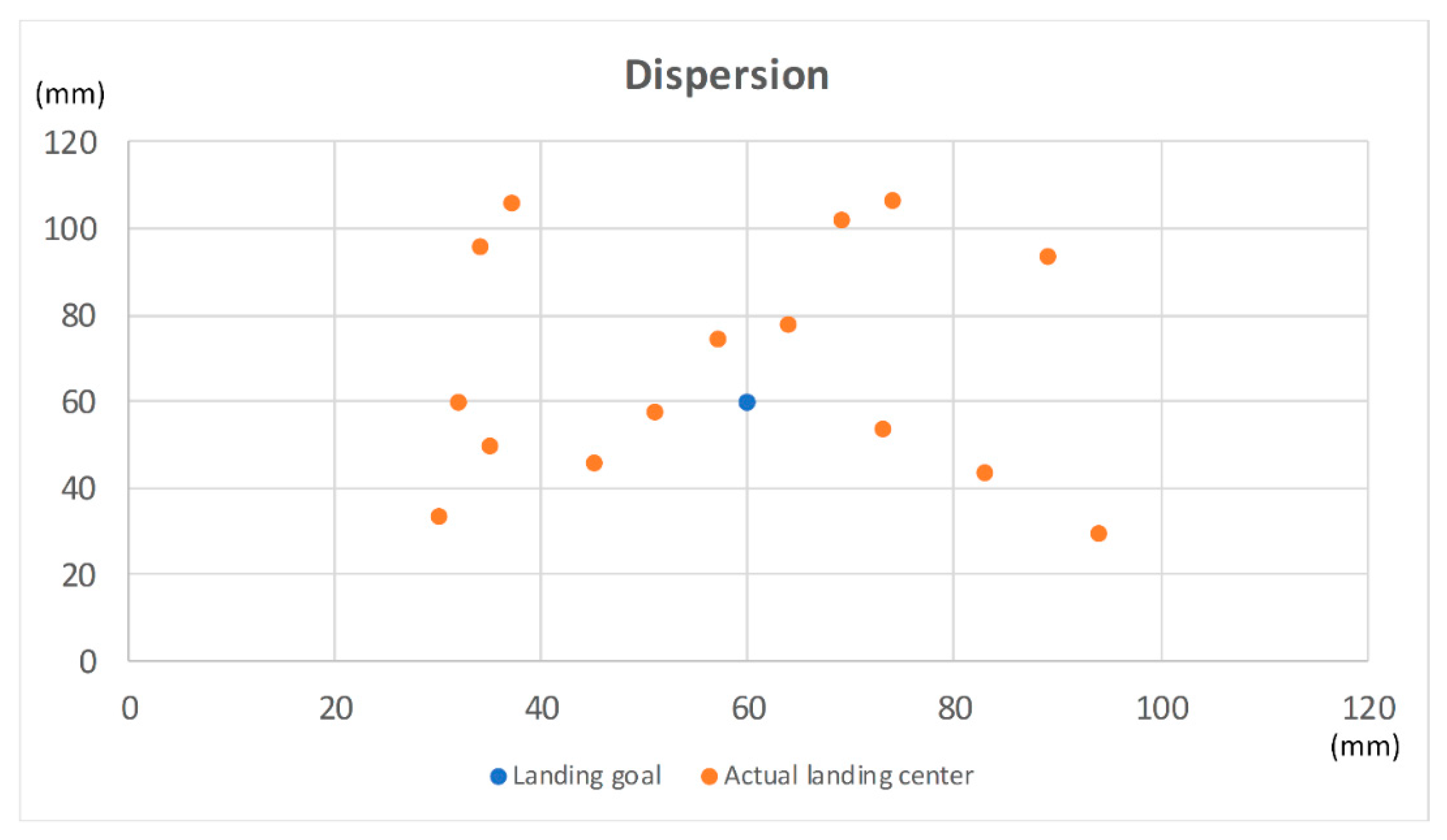
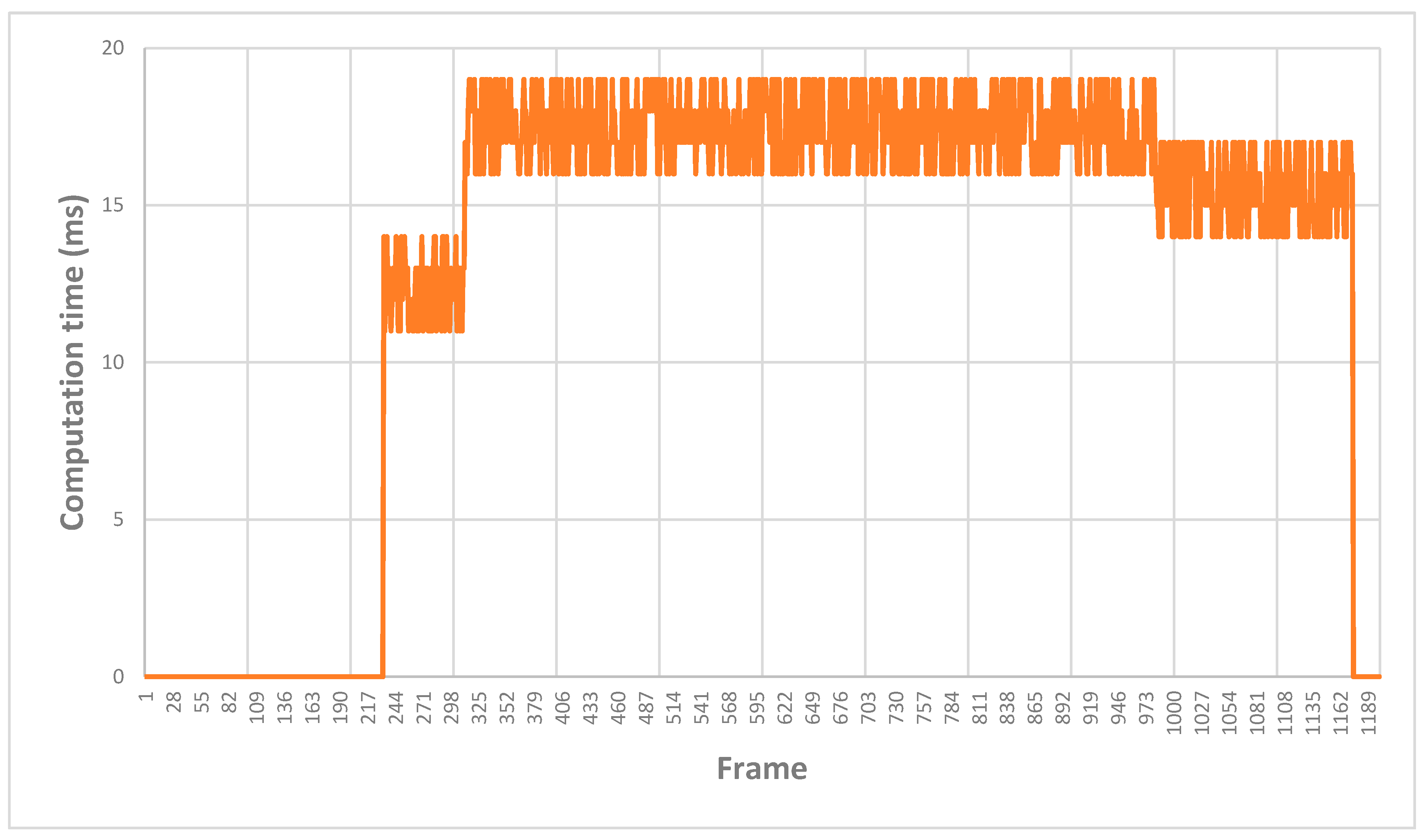
3.2. Landing System
4. Conclusions and Future Work
Author Contributions
Funding
Conflicts of Interest
References
- Yang, Z.-X.; Zhang, P.; Chen, L. RFID-enabled indoor positioning method for a real-time manufacturing execution system using OS-ELM. Neurocomputing 2016, 174, 121–133. [Google Scholar] [CrossRef]
- Ito, Y. An indoor hybrid blimp logistics drone provided with crash-free ability at full power-loss condition. In Proceedings of the 11th International Airship Convention and Regatta, Bedford, UK, 19–21 October 2017. [Google Scholar]
- Otto, A.; Agatz, N.; Campbell, J.; Golden, B.; Pesch, E. Optimization approaches for civil applications of unmanned aerial vehicles (UAVs) or aerial drones: A survey. Networks 2018, 72, 411–458. [Google Scholar] [CrossRef]
- Yoo, W.; Yu, E.; Jung, J. Drone delivery: Factors affecting the public’s attitude and intention to adopt. Telemat. Inform. 2018, 35, 1687–1700. [Google Scholar] [CrossRef]
- Chipade, V.S.; Abhishek; Kothari, M.; Chaudhari, R.R. Systematic design methodology for development and flight testing of a variable pitch quadrotor biplane VTOL UAV for payload delivery. Mechatronics 2018, 55, 94–114. [Google Scholar] [CrossRef] [Green Version]
- Liu, M.; Li, H.; Zhai, H.; Mingzheng, L.; Hongjian, L.; Hualei, Z. Unmanned aerial vehicles for logistics applications. In Proceedings of the 33rd Chinese Control Conference, Nanjing, China, 28–30 July 2014; pp. 8299–8303. [Google Scholar]
- Grippa, P.; Behrens, D.A.; Wall, F.; Bettstetter, C. Drone delivery systems: Job assignment and dimensioning. Auton. Robot. 2018, 43, 261–274. [Google Scholar] [CrossRef] [Green Version]
- Kuru, K.; Ansell, D.; Khan, W.; Yetgin, H. Analysis and optimisation of unmanned aerial vehicle swarms in logistics: An intelligent delivery platform. IEEE Access 2019, 7, 15804–15831. [Google Scholar] [CrossRef]
- Yadav, V.; Narasimhamurthy, A. A heuristics based approach for optimizing delivery schedule of an Unmanned Aerial Vehicle (Drone) based delivery system. In Proceedings of the 9th International Conference on Advances in Pattern Recognition (ICAPR), Bangalore, India, 27–30 December 2017; pp. 1–6. [Google Scholar]
- Narkus-Kramer, M.P. Future Demand and Benefits for Small Unmanned Aerial Systems (UAS) Package Delivery. In Proceedings of the 17th AIAA Aviation Technology, Integration, and Operations Conference, Denver, CO, USA, 5–9 June 2017; p. 4103. [Google Scholar]
- Park, J.; Kim, S.; Suh, K. A Comparative Analysis of the Environmental Benefits of Drone-Based Delivery Services in Urban and Rural Areas. Sustainability 2018, 10, 888. [Google Scholar] [CrossRef] [Green Version]
- Carlsson, J.G.; Song, S. Coordinated Logistics with a Truck and a Drone. Manag. Sci. 2018, 64, 4052–4069. [Google Scholar] [CrossRef] [Green Version]
- Boysen, N.; Briskorn, D.; Fedtke, S.; Schwerdfeger, S. Drone delivery from trucks: Drone scheduling for given truck routes. Networks 2018, 72, 506–527. [Google Scholar] [CrossRef]
- Figliozzi, M. Drones for Commercial Last-Mile Deliveries: A Discussion of Logistical, Environmental, and Economic Trade-Offs; University of Toronto: Toronto, ON, Canada, 15 September 2017. [Google Scholar]
- Moshref-Javadi, M.; Lee, S. Using drones to minimize latency in distribution systems. In Proceedings of the First Triennial Conference, Chicago, IL, USA, 26–29 July 2017; pp. 235–240. [Google Scholar]
- Ni, H.; Deng, X.; Gong, B.; Wang, P. Design of Regional Logistics System Based on Unmanned Aerial Vehicle. In Proceedings of the IEEE 7th Data Driven Control and Learning Systems Conference (DDCLS), Enshi, China, 25–27 May 2018; pp. 1045–1051. [Google Scholar]
- Pugliese, L.D.P.; Guerriero, F. Last-Mile Deliveries by Using Drones and Classical Vehicles. In International Conference on Optimatization and Decision Science; Springer: Berlin/Heidelberg, Germany, 2017; pp. 557–565. [Google Scholar]
- Krakowczyk, D.; Wolff, J.; Ciobanu, A.; Meyer, D.J.; Hrabia, C.-E. Developing a Distributed Drone Delivery System with a Hybrid Behavior Planning System. In KI 2018: Advances in Artificial Intelligence; Trollmann, F., Turhan, A.Y., Eds.; Springer Science and Business Media LLC: Berlin/Heidelberg, Germany, 2018; pp. 107–114. [Google Scholar]
- Lee, J. Optimization of a modular drone delivery system. In Proceedings of the Annual IEEE International Systems Conference (SysCon), Montreal, QC, Canada, 24–27 April 2017; pp. 1–8. [Google Scholar]
- Wrycza, P.; Rotgeri, M.; Hompel, M. Spielzeitreduktion autonomer Drohnen für den Transport eiliger Güter durch den Einsatz automatisierter Lastaufnahmemittel im Kontext eines ganzheitlich automatisierten Gesamtsystems. Logist. J. Proc. 2017. [Google Scholar] [CrossRef]
- Gatteschi, V.; Lamberti, F.; Paravati, G.; Sanna, A.; DeMartini, C.; Lisanti, A.; Venezia, G. New Frontiers of Delivery Services Using Drones: A Prototype System Exploiting a Quadcopter for Autonomous Drug Shipments. In Proceedings of the 39th Annual Computer Software and Applications Conference, Taichung, Thailand, 1–5 July 2015; pp. 920–927. [Google Scholar]
- Scott, J.E.; Scott, C.H. Models for Drone Delivery of Medications and Other Healthcare Items. Int. J. Health Inf. Syst. Inform. 2018, 13, 20–34. [Google Scholar] [CrossRef]
- Walia, S.S.; Somarathna, K.U.S.; Hendricks, R.; Jackson, A.; Nagarur, N. Optimizing the Emergency Delivery of Medical Supplies with Unmanned Aircraft Vehicles. In Proceedings of the IISE Annual Conference and Expo, Orlando, FL, USA, 19–22 May 2018. [Google Scholar]
- Xiang, G.; Hardy, A.; Rajeh, M.; Venuthurupalli, L. Design of the life-ring drone delivery system for rip current rescue. In Proceedings of the 2016 IEEE Systems and Information Engineering Design Symposium (SIEDS), Charlottesville, VA, USA, 29 April 2016; IEEE: New York, NY, USA, 2016; pp. 181–186. [Google Scholar] [CrossRef]
- Cordova, F.; Olivares, V. Design of drone fleet management model in a production system of customized products. In Proceedings of the 2016 6th International Conference on Computers Communications and Control (ICCCC), Oradea, Romania, 10–14 May 2016; pp. 165–172. [Google Scholar]
- Olivares, V.; Cordova, F. Evaluation by computer simulation of the operation of a fleet of drones for transporting materials in a manufacturing plant of plastic products. In Proceedings of the 2015 Chilean Conference on Electrical, Electronics Engineering, Information and Communication Technologies (CHILECON), Santiago, Chile, 28–30 October 2015; pp. 847–853. [Google Scholar]
- Olivares, V.; Córdova, F.; Sepúlveda, J.M.; Derpich, I. Modeling Internal Logistics by Using Drones on the Stage of Assembly of Products. Procedia Comput. Sci. 2015, 55, 1240–1249. [Google Scholar] [CrossRef] [Green Version]
- Olivares, V.; Cordova, F.; Durán, C. Transport logistics and simulation model for fleet of drones in a Mass Customization System. In Proceedings of the 2017 Chilean Conference on Electrical, Electronics Engineering, Information and Communication Technologies (CHILECON), Pucon, Chile, 28–30 October 2017; pp. 1–6. [Google Scholar]
- Wubben, J.; Fabra, F.; Calafate, C.; Krzeszowski, T.; Marquez-Barja, J.M.; Cano, J.-C.; Manzoni, P. Accurate Landing of Unmanned Aerial Vehicles Using Ground Pattern Recognition. Electronics 2019, 8, 1532. [Google Scholar] [CrossRef] [Green Version]
- Yang, T.; Li, P.; Zhang, H.; Li, J.; Li, Z. Monocular Vision SLAM-Based UAV Autonomous Landing in Emergencies and Unknown Environments. Electronics 2018, 7, 73. [Google Scholar] [CrossRef] [Green Version]
- Lin, S.; Garratt, M.; Lambert, A.J.; Shanggang, L. Real-time 6DoF deck pose estimation and target tracking for landing an UAV in a cluttered shipboard environment using on-board vision. In Proceedings of the 2015 IEEE International Conference on Mechatronics and Automation (ICMA), Beijing, China, 2–5 August 2015; pp. 474–481. [Google Scholar]
- Chaves, S.M.; Wolcott, R.W.; Eustice, R.M. NEEC research: Toward GPS-denied landing of unmanned aerial vehicles on ships at sea. Nav. Eng. J. 2015, 127, 23–35. [Google Scholar]
- Fiala, M. ARTag, a Fiducial Marker System Using Digital Techniques. In Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’05)—Workshops, San Diego, CA, USA, 20–25 June 2005; pp. 590–596. [Google Scholar]
- Wang, J.; Olson, E. AprilTag 2: Efficient and robust fiducial detection. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016; pp. 4193–4198. [Google Scholar]
- Muñoz-Salinas, R.; Marín-Jimenez, M.J.; Yeguas-Bolivar, E.; Medina-Carnicer, R. Mapping and localization from planar markers. Pattern Recognit. 2018, 73, 158–171. [Google Scholar] [CrossRef] [Green Version]
- Romero-Ramirez, F.J.; Muñoz-Salinas, R.; Medina-Carnicer, R. Speeded up detection of squared fiducial markers. Image Vis. Comput. 2018, 76, 38–47. [Google Scholar] [CrossRef]
- Garrido-Jurado, S.; Muñoz-Salinas, R.; Madrid-Cuevas, F.; Medina-Carnicer, R. Generation of fiducial marker dictionaries using Mixed Integer Linear Programming. Pattern Recognit. 2016, 51, 481–491. [Google Scholar] [CrossRef]
- Jiménez Bravo, R. Sistema de Seguimiento de Objetos Usando OpenCv, ArUco y Filtro de Kalman Extendido; Final Degree Work; Departamento de Ingeniería de Sistemas y Automática, Universidad de Sevilla: Sevilla, Spain, 2018. [Google Scholar]
- Sani, M.F.; Karimian, G. Automatic navigation and landing of an indoor AR. drone quadrotor using ArUco marker and inertial sensors. In Proceedings of the 2017 International Conference on Computer and Drone Applications (IConDA), Kuching, Malaysia, 9–11 November 2017; pp. 102–107. [Google Scholar]
- Premachandra, C.; Thanh, D.N.H.; Kimura, T.; Kawanaka, H. A study on hovering control of small aerial robot by sensing existing floor features. IEEE/CAA J. Autom. Sin. 2020, 7, 1016–1025. [Google Scholar] [CrossRef]
- Anand, A.; Barman, S.; Prakash, N.S.; Peyada, N.K.; Sinha, J.D. Vision Based Automatic Landing of Unmanned Aerial Vehicle. Intelligent Tools for Building a Scientific Information Platform; Springer Science and Business Media LLC: Berlin/Heidelberg, Germany, 2020; pp. 102–113. [Google Scholar]
- Dergachov, K.; Bahinskii, S.; Piavka, I. The Algorithm of UAV Automatic Landing System Using Computer Vision. In Proceedings of the 2020 IEEE 11th International Conference on Dependable Systems, Services and Technologies (DESSERT), Kyiv, Ukraine, 14–18 May 2020; pp. 247–252. [Google Scholar]
- Bal, M.; Liu, M.; Shen, W.; Ghenniwa, H. Localization in cooperative Wireless Sensor Networks: A review. In Proceedings of the 2009 13th International Conference on Computer Supported Cooperative Work in Design, Santiago, Chile, 22–24 April 2009; pp. 438–443. [Google Scholar]
- Brena, R.F.; García-Vázquez, J.P.; Galván-Tejada, C.E.; Muñoz-Rodriguez, D.; Vargas-Rosales, C.; Fangmeyer, J. Evolution of Indoor Positioning Technologies: A Survey. J. Sens. 2017, 2017, 2630413. [Google Scholar] [CrossRef]
- Ijaz, F.; Yang, H.K.; Ahmad, A.W.; Lee, C. Indoor positioning: A review of indoor ultrasonic positioning systems. In Proceedings of the 2013 15th International Conference on Advanced Communications Technology (ICACT), PyeongChang, Korea, 27–30 January 2013; pp. 1146–1150. [Google Scholar]
- Kivimäki, T.; Vuorela, T.; Peltola, P.; Vanhala, J. A Review on Device-Free Passive Indoor Positioning Methods. Int. J. Smart Home 2014, 8, 71–94. [Google Scholar] [CrossRef]
- Mainetti, L.; Patrono, L.; Sergi, I. A survey on indoor positioning systems. In Proceedings of the 2014 22nd International Conference on Software, Telecommunications and Computer Networks (SoftCOM), Split, Croatia, 17–19 September 2014; pp. 111–120. [Google Scholar]
- Mrindoko, N.R.; Minga, L.M. A comparison review of indoor positioning techniques. Int. J. Comput. 2016, 21, 42–49. [Google Scholar]
- Yan, J.; Tiberius, C.C.J.M.; Janssen, G.J.M.; Teunissen, P.J.G.; Bellusci, G. Review of range-based positioning algorithms. IEEE Aerosp. Electron. Syst. Mag. 2013, 28, 2–27. [Google Scholar] [CrossRef] [Green Version]
- Zafari, F.; Gkelias, A.; Leung, K.K. A Survey of Indoor Localization Systems and Technologies. IEEE Commun. Surv. Tutorials 2019, 21, 2568–2599. [Google Scholar] [CrossRef] [Green Version]
- Oliveira, T.D.A.; Godoy, E.P. ZigBee Wireless Dynamic Sensor Networks: Feasibility Analysis and Implementation Guide. IEEE Sens. J. 2016, 16, 4614–4621. [Google Scholar] [CrossRef] [Green Version]
- Klauer, B.; Haase, J.; Meyer, D.; Eckert, M. Wireless sensor/actuator device configuration by NFC with secure key exchange. In Proceedings of the 2017 IEEE AFRICON, Cape Town, South Africa, 18–20 September 2017; pp. 473–478. [Google Scholar]
- Mejjaouli, S.; Babiceanu, R.F. RFID-wireless sensor networks integration: Decision models and optimization of logistics systems operations. J. Manuf. Syst. 2015, 35, 234–245. [Google Scholar] [CrossRef]
- Pavan, A. A Survey of Z-wave Wireless Sensor Network Technology. IJSRCSEIT 2018, 3, 556–560. [Google Scholar]
- Schmidt, J.F.; Neuhold, D.; Klaue, J.; Schupke, D.; Bettstetter, C. Experimental study of UWB connectivity in industrial environments. In Proceedings of the 24th European Wireless Conference, Catania, Italy, 2–4 May 2018; pp. 1–4. [Google Scholar]
- Yang, J.; Zhou, J.; Lv, Z.; Wei, W.; Song, H. A Real-Time Monitoring System of Industry Carbon Monoxide Based on Wireless Sensor Networks. Sensors 2015, 15, 29535–29546. [Google Scholar] [CrossRef] [Green Version]
- Sarma, S.E.; Weis, S.A.; Engels, D.W. RFID Systems and Security and Privacy Implications. In CHES: International Workshop on Cryptographic Hardware and Embedded Systems; Lecture Notes in Computer Science; Springer Science and Business Media LLC: Berlin/Heidelberg, Germany, 2003; pp. 454–469. [Google Scholar]
- Shukla, S. Access Management and Control using NFC. Int. J. Sci. Res. 2016, 5, 564–566. [Google Scholar]
- Ruan, Q.; Xu, W.; Wang, G. RFID and ZigBee based manufacturing monitoring system. In Proceedings of the 2011 International Conference on Electric Information and Control Engineering, Shanghai, China, 10–12 June 2011; pp. 1672–1675. [Google Scholar]
- Cruz, O.; Ramos, E.; Ramírez, M. 3D indoor location and navigation system based on Bluetooth. In Proceedings of the CONIELECOMP 2011, 21st International Conference on Electrical Communications and Computers, Puebla, Mexico, 28 February–2 March 2011; pp. 271–277. [Google Scholar]
- Rida, M.E.; Liu, F.; Jadi, Y.; Algawhari, A.A.A.; Askourih, A. Indoor Location Position Based on Bluetooth Signal Strength. In Proceedings of the 2015 2nd International Conference on Information Science and Control Engineering, Shanghai, China, 24–26 April 2015; pp. 769–773. [Google Scholar]
- Sharifi, H.; Kumar, A.; Alam, F.; Arif, K.M. Indoor localization of mobile robot with visible light communication. In Proceedings of the 2016 12th IEEE/ASME International Conference on Mechatronic and Embedded Systems and Applications (MESA), Auckland, New Zealand, 29–31 August 2016; pp. 1–6. [Google Scholar]
- Kumar, G.A.; Patil, A.K.; Patil, R.; Park, S.S.; Chai, Y.H. A LiDAR and IMU Integrated Indoor Navigation System for UAVs and Its Application in Real-Time Pipeline Classification. Sensors 2017, 17, 1268. [Google Scholar] [CrossRef] [Green Version]
- Xu, H.; Ding, Y.; Li, P.; Wang, R.; Li, Y. An RFID Indoor Positioning Algorithm Based on Bayesian Probability and K-Nearest Neighbor. Sensors 2017, 17, 1806. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Choi, J.S.; Lee, H.; Engels, D.W.; Elmasri, R. Passive UHF RFID-Based Localization Using Detection of Tag Interference on Smart Shelf. IEEE Trans. Syst. Man Cybern. Part C Appl. Rev. 2011, 42, 268–275. [Google Scholar] [CrossRef]
- Wu, X.; Deng, F.; Chen, Z. RFID 3D-LANDMARC Localization Algorithm Based on Quantum Particle Swarm Optimization. Electronics 2018, 7, 19. [Google Scholar] [CrossRef] [Green Version]
- Rehman, S.U.; Liu, R.; Zhang, H.; Liang, G.; Fu, Y.; Qayoom, A. Localization of Moving Objects Based on RFID Tag Array and Laser Ranging Information. Electronics 2019, 8, 887. [Google Scholar] [CrossRef] [Green Version]
- Dixon, J. Suspension Analysis and Computational Geometry; Wiley: Hoboken, NJ, USA, 2009. [Google Scholar]
- Foumani, M.; Gunawan, I.; Smith, K. Resolution of deadlocks in a robotic cell scheduling problem with post-process inspection system: Avoidance and recovery scenarios. In Proceedings of the 2015 IEEE International Conference on Industrial Engineering and Engineering Management (IEEM), Singapore, 6–9 December 2015; pp. 1107–1111. [Google Scholar]
- Foumani, M.; Moeini, A.; Haythorpe, M.; Smith-Miles, K. A cross-entropy method for optimising robotic automated storage and retrieval systems. Int. J. Prod. Res. 2018, 56, 6450–6472. [Google Scholar] [CrossRef]
- Patton, R. Fault detection and diagnosis in aerospace systems using analytical redundancy. Comput. Control. Eng. J. 1991, 2, 127–136. [Google Scholar] [CrossRef]
- Ma, H.; Wang, Y.; Wang, K. Automatic detection of false positive RFID readings using machine learning algorithms. Expert Syst. Appl. 2018, 91, 442–451. [Google Scholar] [CrossRef]
- Pierre, R.S.; Bergbreiter, S. Toward Autonomy in Sub-Gram Terrestrial Robots. Annu. Rev. Control. Robot. Auton. Syst. 2019, 2, 231–252. [Google Scholar] [CrossRef]
- Peng, W.; Hu, X.; Zhao, F.; Su, J. A Fast Algorithm to Find All-Pairs Shortest Paths in Complex Networks. Procedia Comput. Sci. 2012, 9, 557–566. [Google Scholar] [CrossRef] [Green Version]
- Rosebrock, A. Deep Learning for Computer Vision with Python: Starter Bundle. PyImageSearch. Available online: https://www.pyimagesearch.com/deep-learning-computer-vision-python-book/ (accessed on 25 September 2020).
- Kaehler, A.; Bradski, G. Learning OpenCV 3: Computer Vision in C with the OpenCV Library; O’Reilly Media: Sebastopol, CA, USA, 2016. [Google Scholar]
- OpenCV Documentation. Available online: http://Opencv.Org./Documentation.Html (accessed on 25 September 2020).
- Liu, D.; Yu, J. Otsu Method and K-means. In Proceedings of the 2009 Ninth International Conference on Hybrid Intelligent Systems, Shenyang, China, August 12–14 2009; pp. 344–349. [Google Scholar]
- Lu, X.X. A Review of Solutions for Perspective-n-Point Problem in Camera Pose Estimation. J. Phys. Conf. Ser. 2018, 1087, 052009. [Google Scholar] [CrossRef]
- Armangué, X.; Araujo, H.; Salvi, J. A review on egomotion by means of differential epipolar geometry applied to the movement of a mobile robot. Pattern Recognit. 2003, 36, 2927–2944. [Google Scholar] [CrossRef] [Green Version]
- Lepetit, V.; Moreno-Noguer, F.; Fua, P. EPnP: An Accurate O(n) Solution to the PnP Problem. Int. J. Comput. Vis. 2008, 81, 155–166. [Google Scholar] [CrossRef] [Green Version]
- Zhu, Y. Linear minimum variance estimation fusion. Sci. China Ser. F Inf. Sci. 2004, 47, 728. [Google Scholar] [CrossRef]
- Liu, X.; Zhang, S.; Tian, J.; Liu, L.; Liu, T. An Onboard Vision-Based System for Autonomous Landing of a Low-Cost Quadrotor on a Novel Landing Pad. Sensors 2019, 19, 4703. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Michael, N.; Mellinger, D.; Lindsey, Q.; Kumar, V. The GRASP Multiple Micro-UAV Testbed. IEEE Robot. Autom. Mag. 2010, 17, 56–65. [Google Scholar] [CrossRef]
- Hoffmann, G.; Waslander, S.; Tomlin, C. Quadrotor Helicopter Trajectory Tracking Control. In Proceedings of the AIAA Guidance, Navigation and Control Conference and Exhibit, Honolulu, HI, USA, 18–21 August 2008; p. 7410. [Google Scholar]
- Pestana, J.; Mellado-Bataller, I.; Sanchez-Lopez, J.L.; Fu, C.; Mondragón, I.F.; Campoy, P. A General Purpose Configurable Controller for Indoors and Outdoors GPS-Denied Navigation for Multirotor Unmanned Aerial Vehicles. J. Intell. Robot. Syst. 2013, 73, 387–400. [Google Scholar] [CrossRef]
- Bernard, D.D.C.; Riccardi, F.; Giurato, M.; Lovera, M. A dynamic analysis of ground effect for a quadrotor platform. IFAC 2017, 50, 10311–10316. [Google Scholar] [CrossRef]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Characteristic | Detail |
|---|---|
| Engine | T-Motor MN3110 700 KV |
| ESC | T-Motor T30A 300 Hz |
| Propellers | APC Electric E 12 × 4.7 |
| Battery | 4S3P Samsung INR 18650 20S 15/20C 16.8 V 6000 mAh |
| Engine diagonal | 533 mm |
| Flight controller | Pixhawk PX-4 |
| Computer | Raspberry Pi 4 8G |
| Description | Item |
|---|---|
| RFID reader module | Chainway CM2000-1 |
| UART adapter | UART to USB adapter |
| UHF antenna | Winnix HYN504P |
| Sonar | MaxBotix 1232 I2C |
| Camera | Raspberry Pi NoIR v2 (8MP) |
| Zigbee USB interface | USB Adapter module for Xbee |
| Zigbee communication | Xbee PRO module |
| Flight controller | Pixhawk 4 |
| Computer | Raspberry Pi 4 8GB |
| Description | Item |
|---|---|
| Zigbee USB interface | USB Adapter module for Xbee |
| Zigbee communication | Xbee PRO module |
| Computer | Raspberry Pi 3 B+ |
| Concept | Value |
|---|---|
| Average error (all values) | 29.83% |
| Average error (no outliers) | 15.69% |
| RMSE (all values) | 0.054 |
| RMSE (no outliers) | 0.053 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Orgeira-Crespo, P.; Ulloa, C.; Rey-Gonzalez, G.; Pérez García, J.A. Methodology for Indoor Positioning and Landing of an Unmanned Aerial Vehicle in a Smart Manufacturing Plant for Light Part Delivery. Electronics 2020, 9, 1680. https://doi.org/10.3390/electronics9101680
Orgeira-Crespo P, Ulloa C, Rey-Gonzalez G, Pérez García JA. Methodology for Indoor Positioning and Landing of an Unmanned Aerial Vehicle in a Smart Manufacturing Plant for Light Part Delivery. Electronics. 2020; 9(10):1680. https://doi.org/10.3390/electronics9101680
Chicago/Turabian StyleOrgeira-Crespo, Pedro, Carlos Ulloa, Guillermo Rey-Gonzalez, and José Antonio Pérez García. 2020. "Methodology for Indoor Positioning and Landing of an Unmanned Aerial Vehicle in a Smart Manufacturing Plant for Light Part Delivery" Electronics 9, no. 10: 1680. https://doi.org/10.3390/electronics9101680