Detailed Streetspace Modelling for Multiple Applications: Discussions on the Proposed CityGML 3.0 Transportation Model


Abstract
:1. Introduction
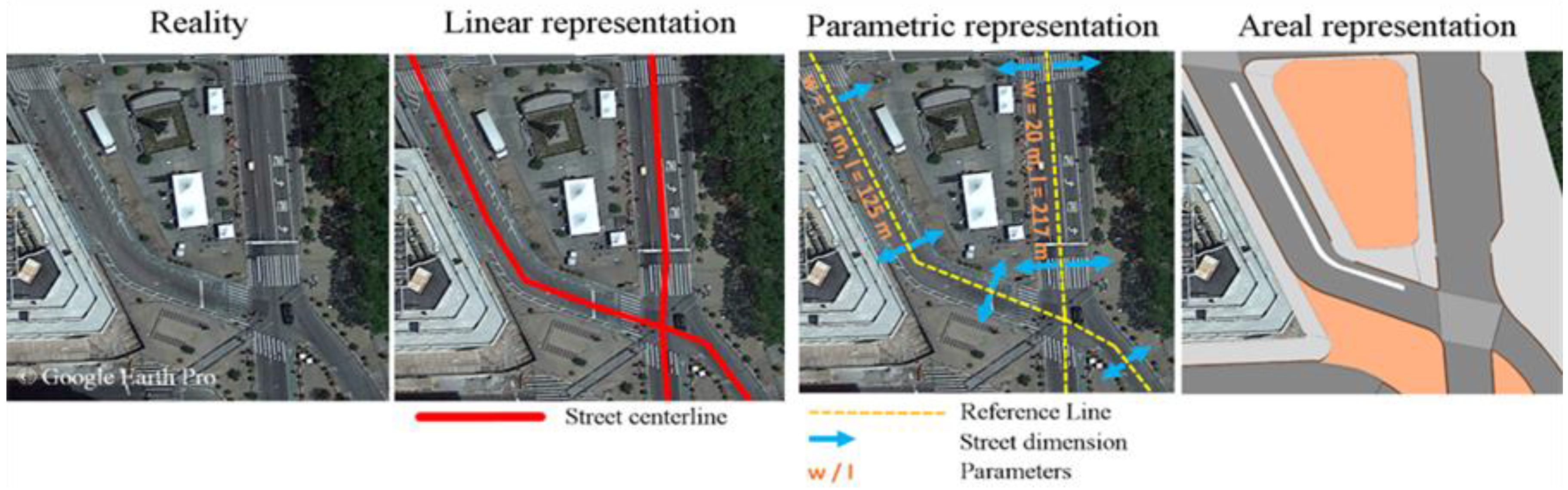
2. Streetspace Modelling
3. Relevant Standards and Data Formats
3.1. Standards and Data Formats Used for Urban and Infrastructure Planning and Design
3.2. Standards and Data Formats Used for Automotive Applications
3.3. Standards and Data Formats Used for Digital Landscape Modelling and Mapping
3.4. Standard Used for Facility and Asset Management
3.5. Evaluation
4. Applications for Detailed Streetspace Models
4.1. Literature Review on Potential Fields of Application
4.1.1. Infrastructure Planning and Management
4.1.2. Automotive Applications
4.1.3. Environmental Simulations and Analyses
4.1.4. Land Administration and Topographic Mapping
4.2. Categorization of Key Modelling Aspects
- Thematic resolution: Possibility to distinguish between different thematic objects as well as the degree of semantic segmentation, available object attributes, and object relationships.
- Geometric resolution: The degree to which geometric details of individual objects are represented as well as the degree of geometric segmentation and available geometries.
- 3-D positional accuracy: Relative or absolute accuracy of object coordinates.
- Network and areal topology: Topological relations between linear and areal representations of road networks or streetspace objects.
- Topicality and evolution: Up-to-dateness of the model; keeping track of the changes of the streetspace model over time and managing different but consistent versions (or stages within the lifecycle) of objects.
- Dynamic and real-time information: Consideration of (highly) time-dependent information; linking objects with (highly) dynamic and real-time information.
- Visualization: Importance of realistic visualization, which may include textures or coloring.
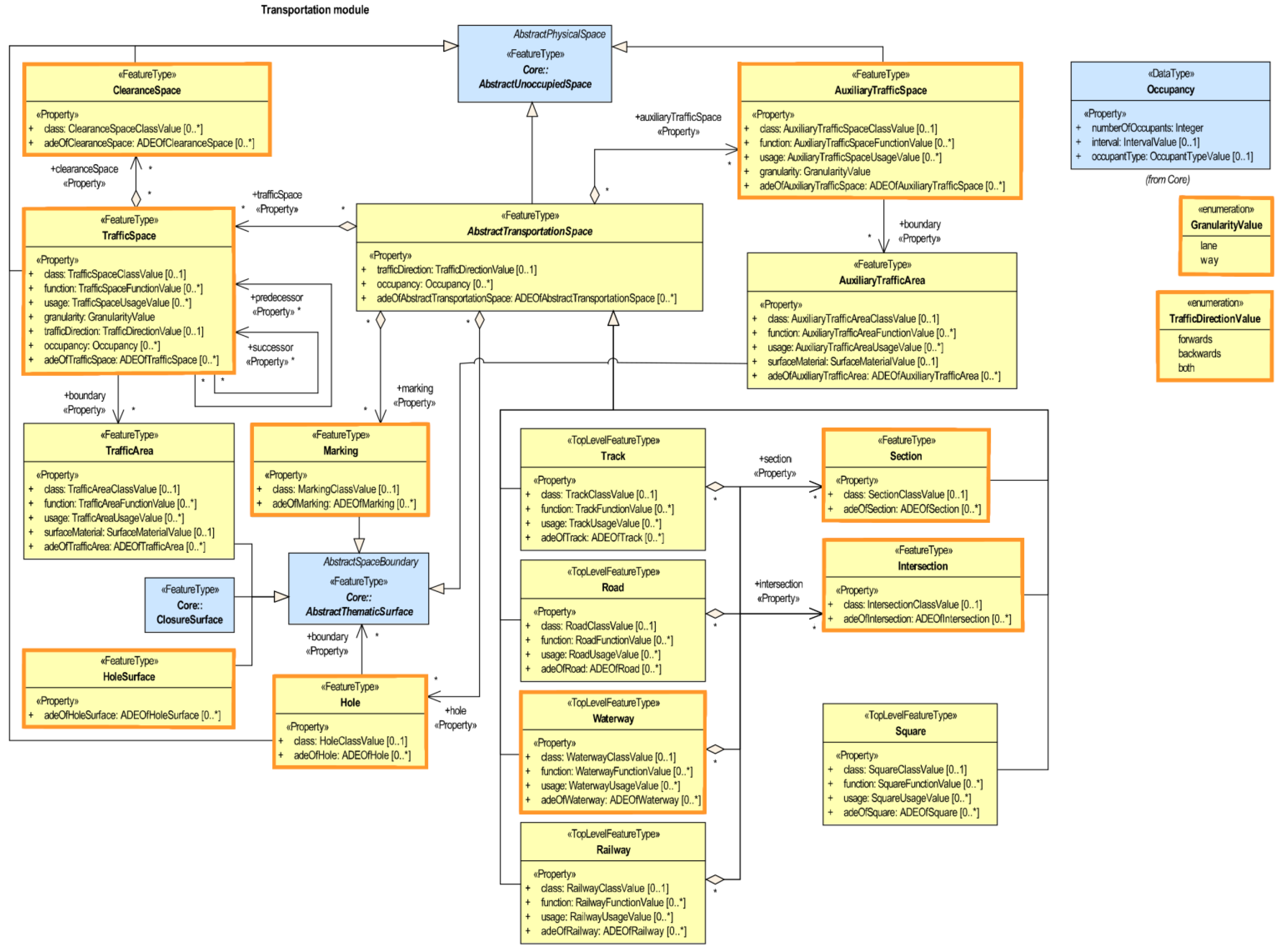
5. Discussion of the Proposed CityGML 3.0 Transportation Model
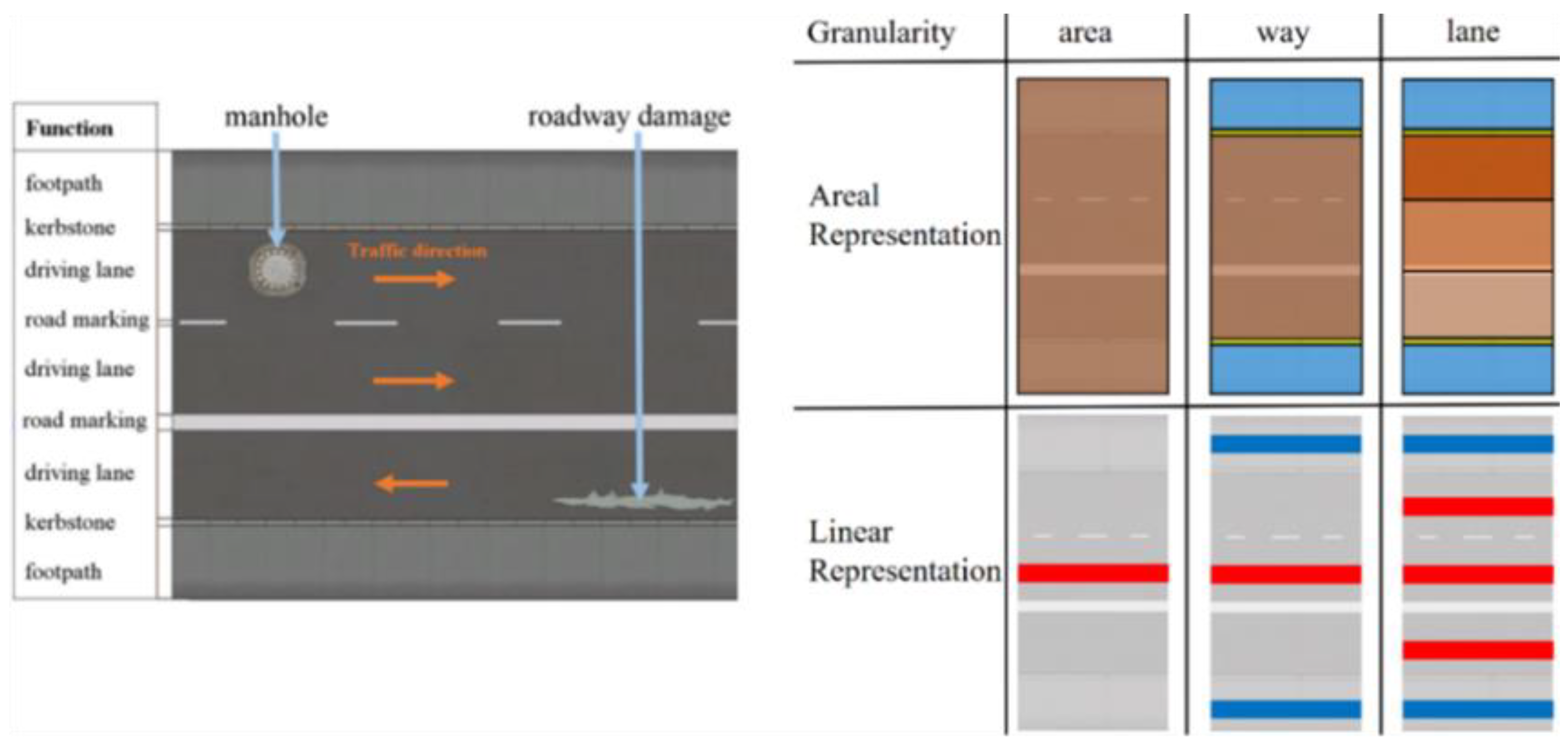
5.1. Thematic Resolution
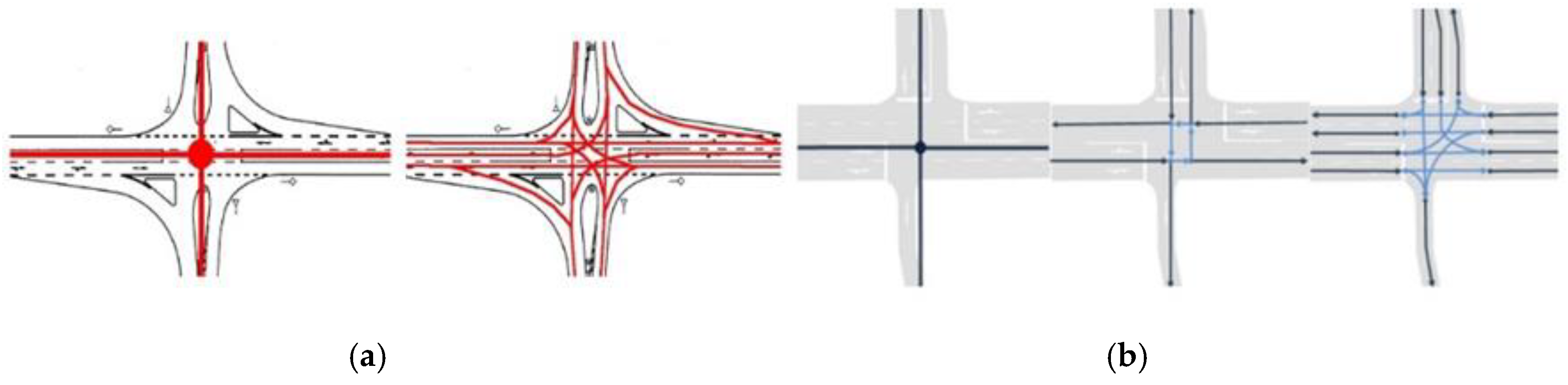
5.2. Geometric Resolution
5.3. 3-D Positional Accuracy
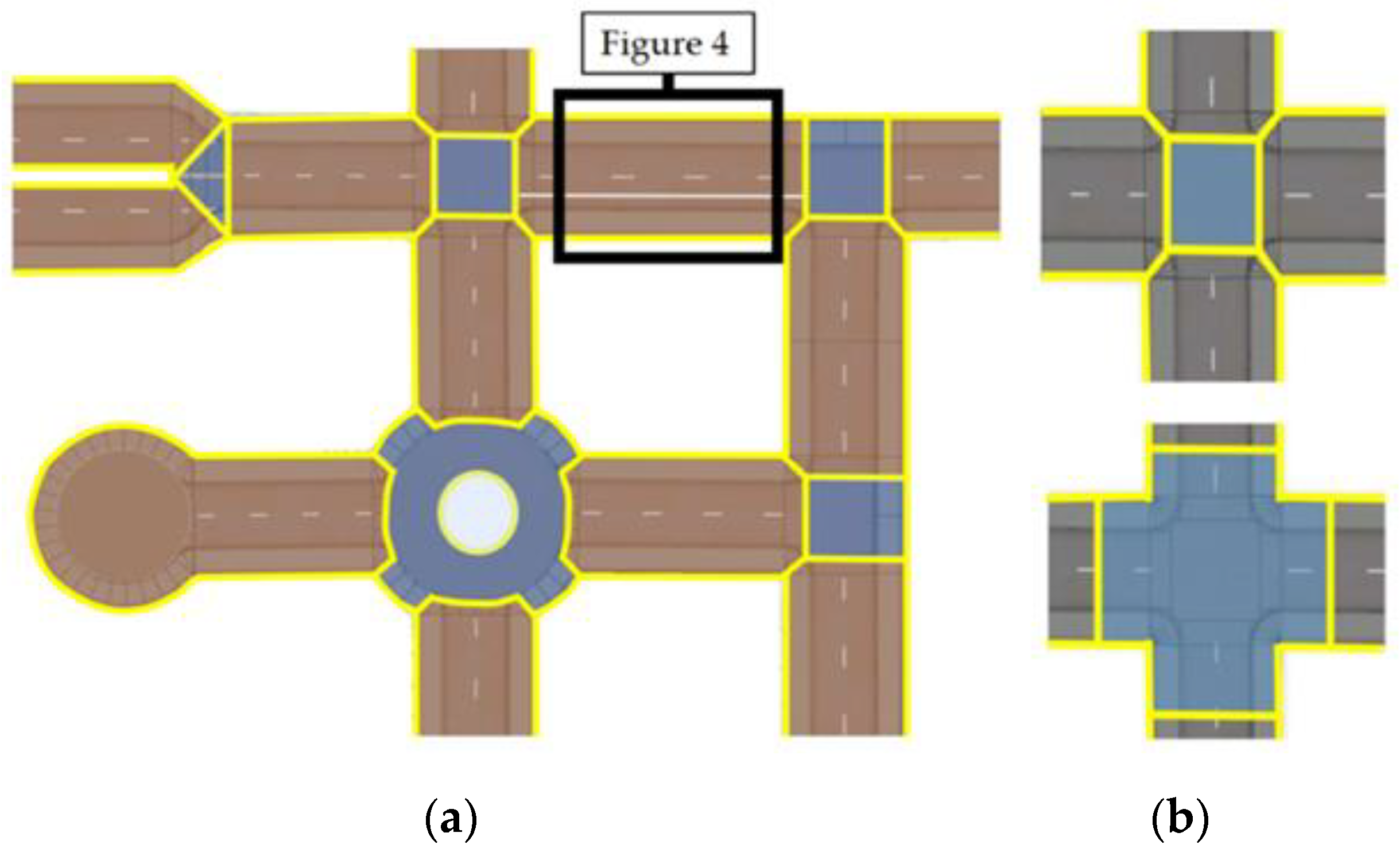
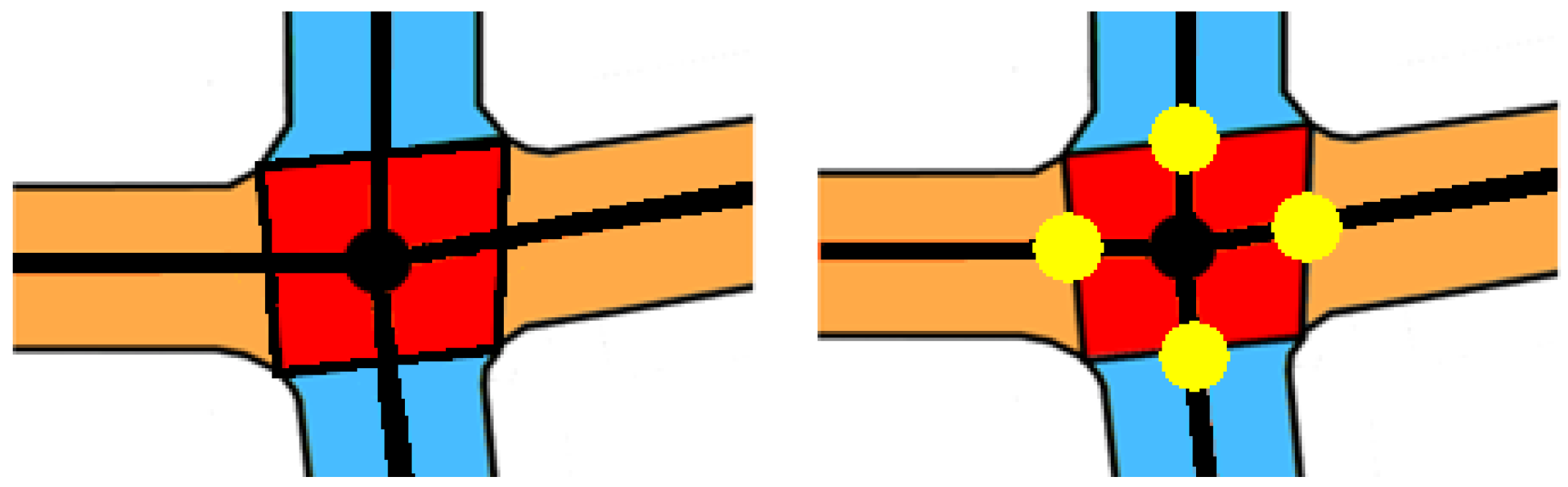
5.4. Network and Areal Topology
5.5. Topicality and Evolution
5.6. Dynamic and Real-Time Information
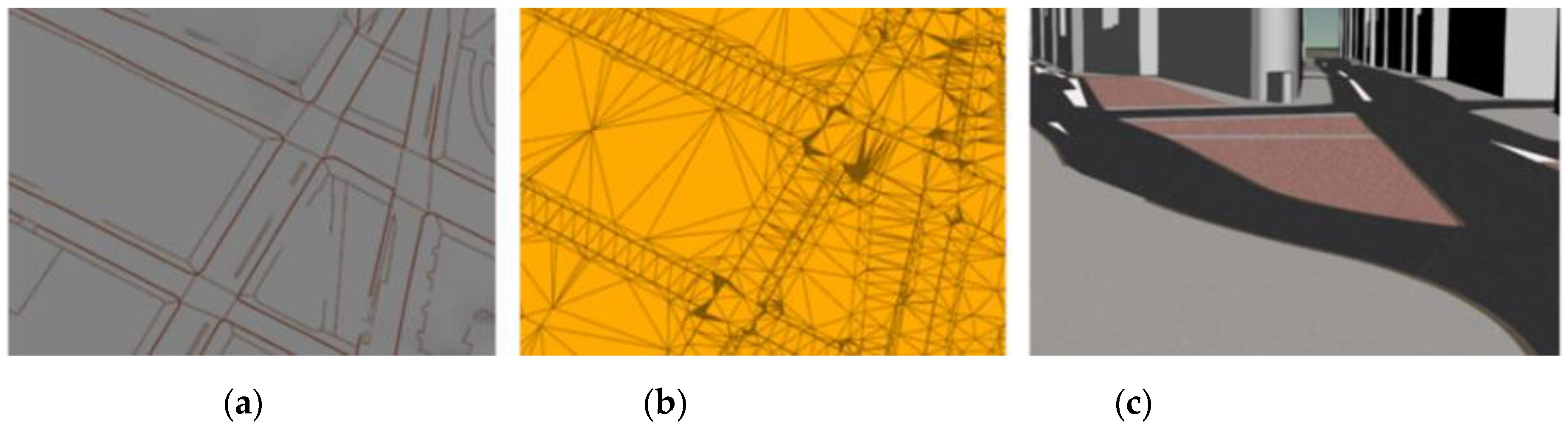
5.7. Visualization
6. CityGML Streetspace Models for Different Cities
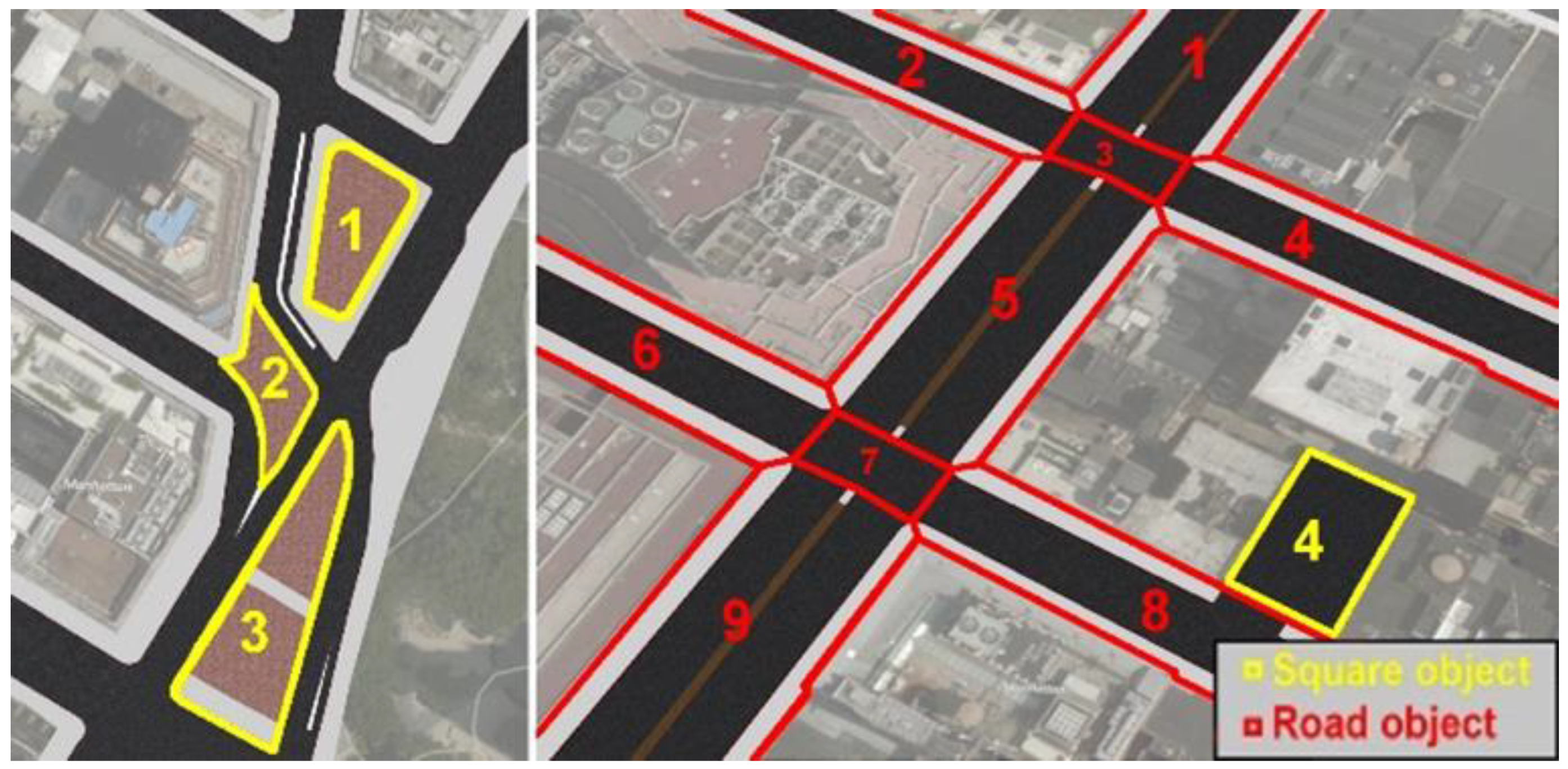
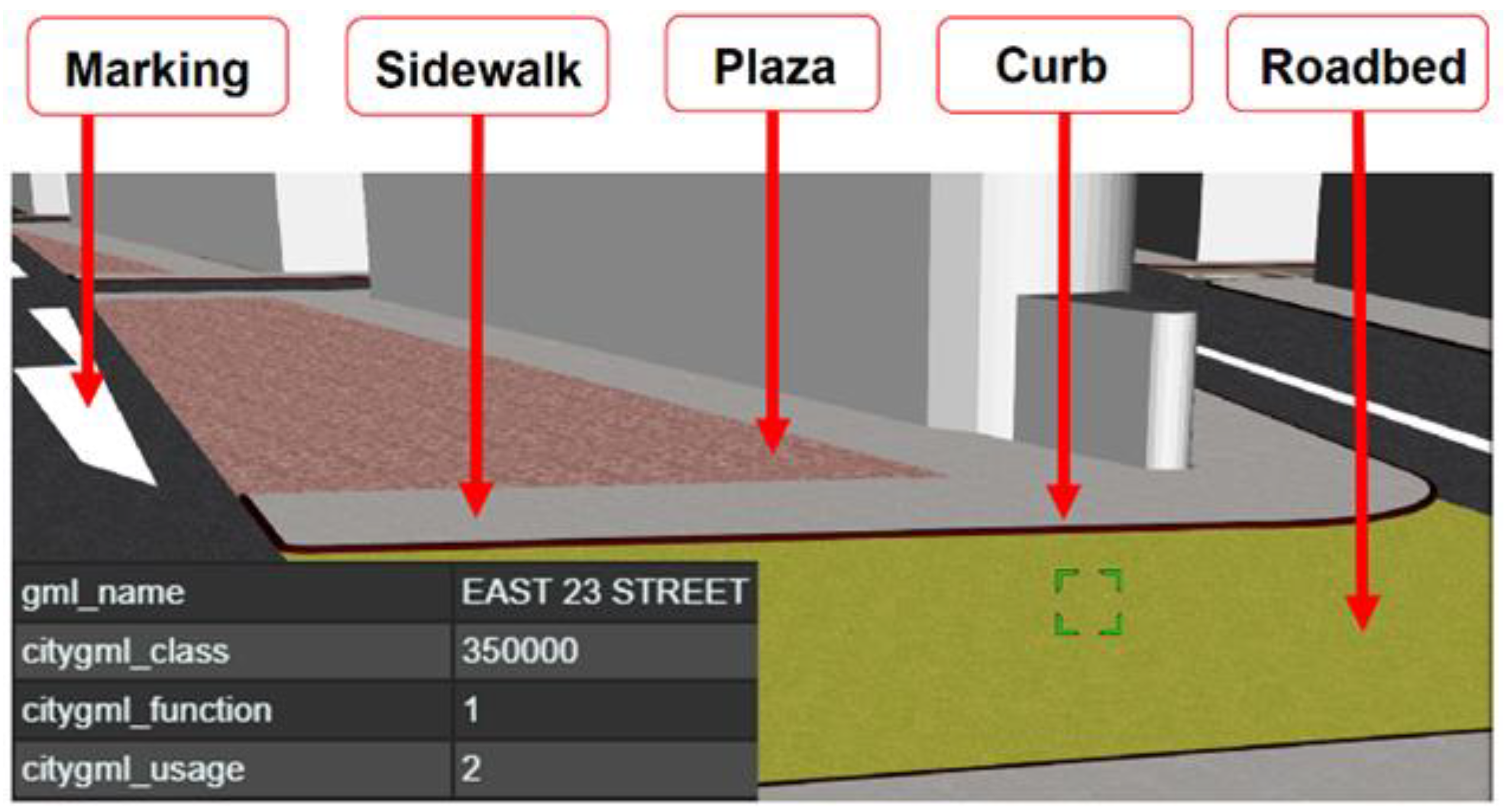
6.1. New York City
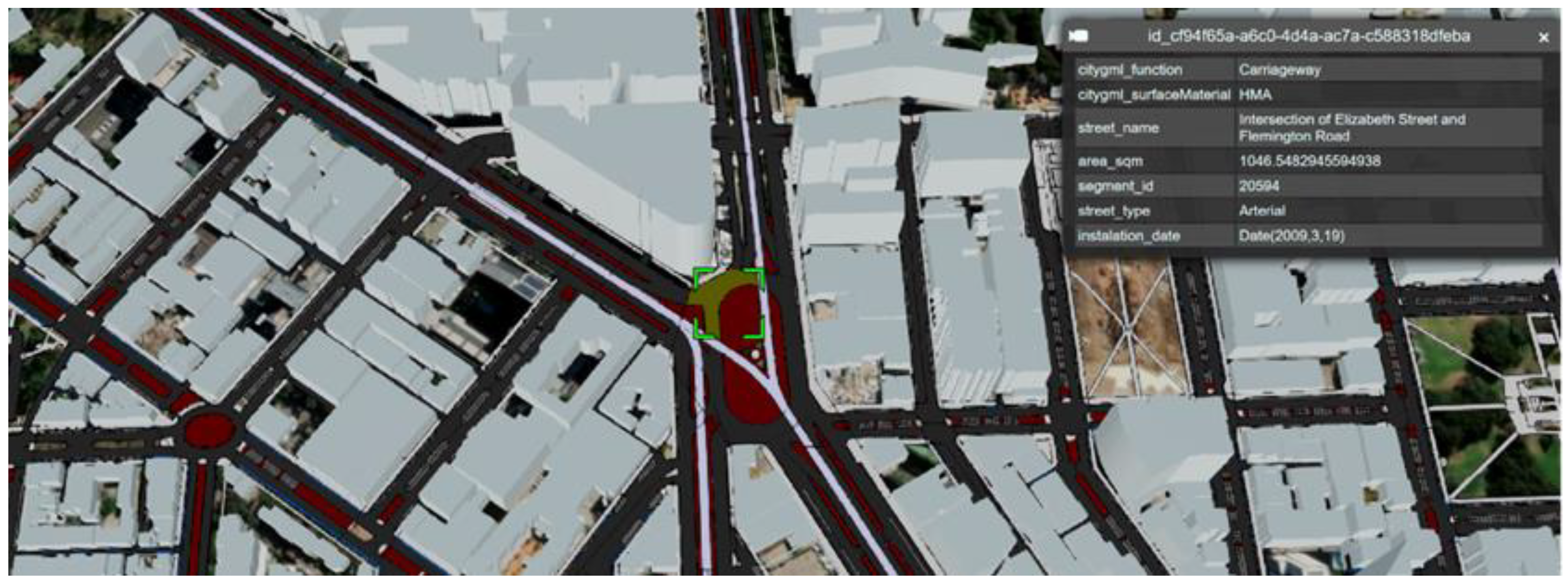
6.2. Melbourne
6.3. Grafing Near Munich
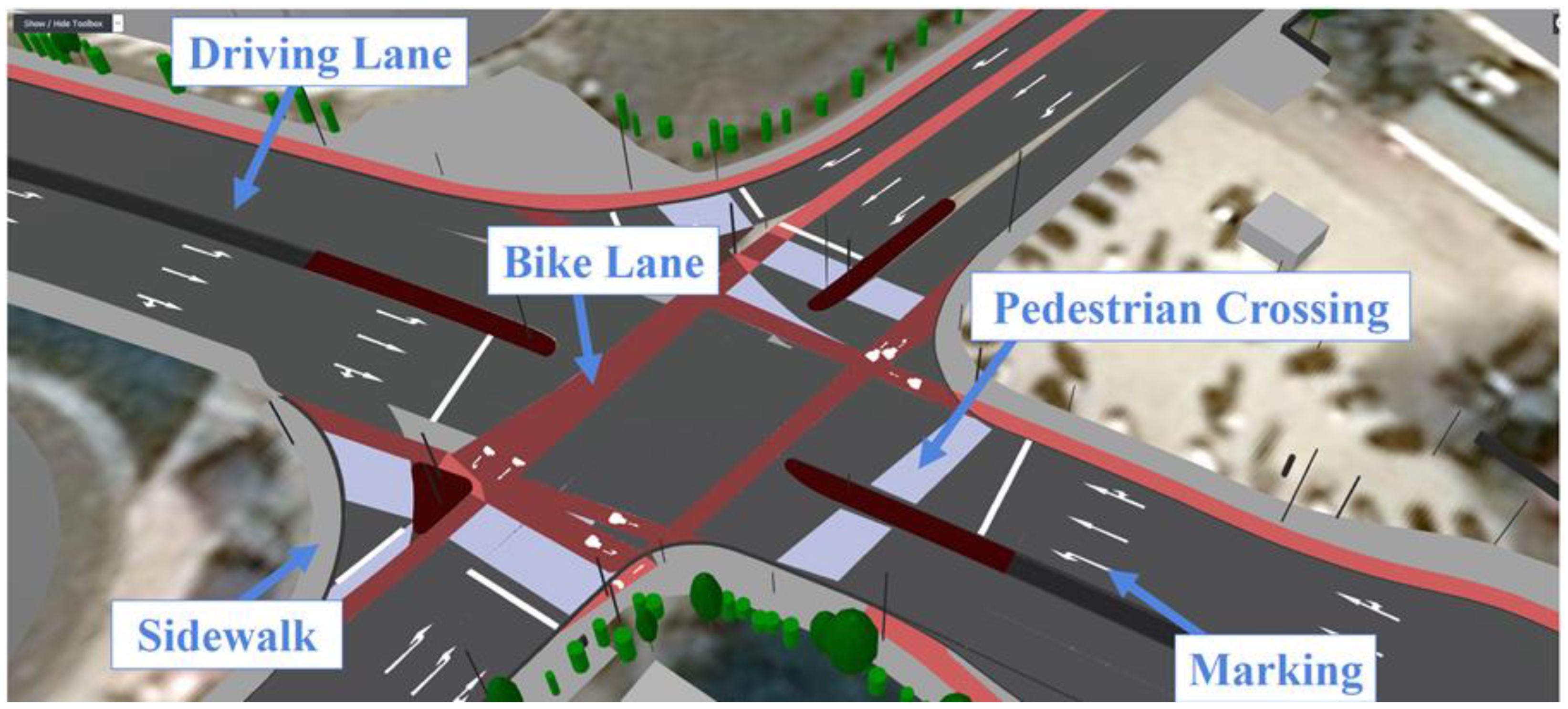
6.4. Complex Intersection in Ingolstadt Derived from OpenDRIVE Data
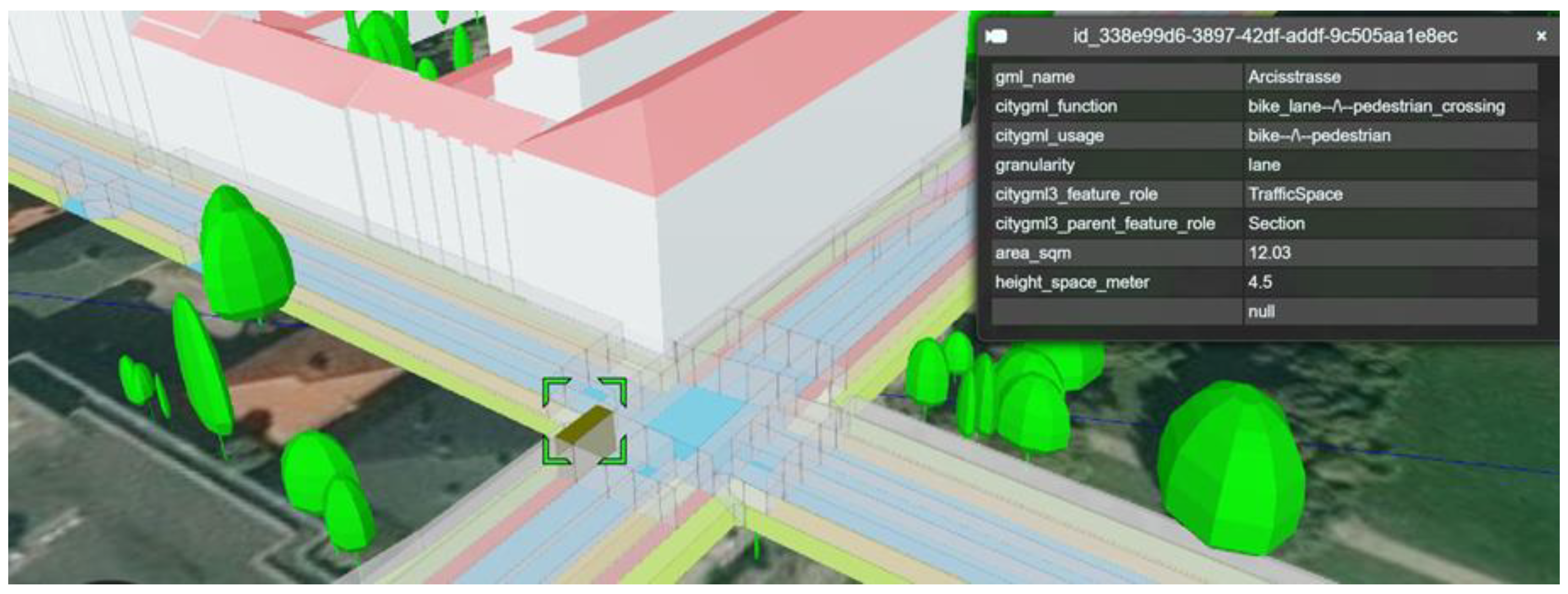
6.5. CityGML 3.0 Concept Demo for an Area Around TU Munich
7. Application Examples
- Total roadbed area: 273,198 m2.
- Total intersection area: 156,085 m2.
- Pavement rating = 6: 43,395 m2.
- Pavement rating = 8–10: 136,322 m2.
8. Summary and Outlook
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Biljecki, F.; Stoter, J.; Ledoux, H.; Zlatanova, S.; Çöltekin, A. Applications of 3D city models: State of the art review. ISPRS Int. J. Geo-Inf. 2015, 4, 2842–2889. [Google Scholar] [CrossRef] [Green Version]
- Willenborg, B.; Sindram, M.; Kolbe, T.H. Applications of 3D city models for a better understanding of the built environment. In Trends in Spatial Analyses and Modelling; Springer: Cham, Switzerland, 2018; pp. 167–191. [Google Scholar]
- Beil, C.; Kolbe, T.H. CityGML and the streets of New York—A proposal for detailed streetspace modelling. ISPRS Ann. Photogram. Remote Sens. Spat. Inf. Sci. 2017, IV-4/W5, 9–16. [Google Scholar] [CrossRef] [Green Version]
- Kolbe, T.H.; Burger, B.; Cantzler, B. CityGML goes to Broadway. Photogramm. Week 2015, 15, 343–356. [Google Scholar]
- Kutzner, T.; Chaturvedi, K.; Kolbe, T.H. CityGML 3.0: New Functions Open Up New Applications. PFG J. Photogramm. Remote Sens. Geoinf. Sci. 2020, 1–19. [Google Scholar] [CrossRef] [Green Version]
- Beil, C.; Kolbe, T.H. Combined modelling of multiple transportation infrastructure within 3D city models and its implementation using CityGML 3.0. ISPRS Ann. Photo Gram Remote Sens. Spat. Inf. Sci. 2020, IV-4/W5, 29–36. [Google Scholar] [CrossRef]
- Schwab, B.; Kolbe, T.H. Requirement Analyses of 3D Road Space Models for Automated Driving. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, IV-4/W8, 99–106. [Google Scholar] [CrossRef] [Green Version]
- Schwab, B.; Beil, C.; Kolbe, T.H. Spatio-Semantic Road Space Modeling for Vehicle–Pedestrian Simulation to Test Automated Driving Systems. Sustainability 2020, 12, 3799. [Google Scholar] [CrossRef]
- Piga, B.E.A.; Caruso, G.; Ferraioli, A.; Mussone, L. Road scenarios level of details for virtual driving simulation. In Proceedings of the SIDT2019 Transportation Systems for Smart, Sustainable, Inclusive and Secure Communities, Salerno, Italy, 11–13 September 2019; pp. 1–14. [Google Scholar]
- Zlatanova, S.; Yan, J.; Wang, Y.; Diakité, A.; Isikdag, U.; Sithole, G.; Barton, J. Spaces in Spatial Science and Urban Applications—State of the Art Review. ISPRS Int. J. Geo-Inf. 2020, 9, 58. [Google Scholar] [CrossRef] [Green Version]
- Beil, C. Detaillierte Repräsentation des Straßenraums in 3D-Stadtmodellen. Master’s Thesis, Technical University of Munich, München, Germany, 2017. (In German). Available online: https://mediatum.ub.tum.de/node?id=1350734 (accessed on 17 June 2020).
- Labetski, A.; van Gerwen, S.; Tamminga, G.; Ledoux, H.; Stoter, J. A proposal for an improved transportation model in CityGML. ISPRS Int. Arch. Photogramm. Remote. Sens. Spat. Inf. Sci. 2018, XLII-4/W10, 89–96. [Google Scholar] [CrossRef] [Green Version]
- Boersma, F. Modelling Different Levels of Detail of Roads and Intersections in 3D City Models. Master’s Thesis, Delft University of Technology, Delft, The Netherlands, 2019. Available online: https://repository.tudelft.nl/islandora/object/uuid%3Aebfc48f8-4704-47d3-9654-cd00c765e0af (accessed on 17 June 2020).
- Tamminga, G.F. A Novel Design of the Transport Infrastructure for Traffic Simulation Models. Ph.D. Thesis, Delft University of Technology, Delft, The Netherlands, 2019. Available online: https://repository.tudelft.nl/islandora/object/uuid%3A35d2e152-0cfe-439e-a276-da4a69b11acd (accessed on 17 June 2020).
- Gruler, H.-C.; Stubkjaer, E.; Axelsson, P.; Wikstrom, L. OGC Land and Infrastructure Conceptual Model Standard (LandInfra), OGC 15-111. 2016. Available online: https://www.ogc.org/standards/landinfra (accessed on 17 June 2020).
- ISO 16739-1. In Industry Foundation Classes (IFC) for Data Sharing in the Construction and Facility Management Industries; International Organization for Standardization: Geneva, Switzerland, 2018.
- Jaud, Š.; Donaubauer, A.; Borrmann, A. Georeferencing within IFC: A Novel Approach for Infrastructure Objects. In Computing in Civil Engineering 2019: Visualization, Information Modeling, and Simulation; American Society of Civil Engineers: Reston, VA, USA, 2019; pp. 377–384. [Google Scholar]
- ISO 14825. In Intelligent Transport Systems—Geographic Data Files (GDF)—GDF5.0; International Standard; International Organization for Standardization: Geneva, Switzerland, 2011.
- Association for Standardisation of Automation and Measuring Systems e.V. (ASAM). ASAM OpenDRIVE—Open Dynamic Road Information for Vehicle Environment, Version. 1.6. 2020. Available online: https://www.asam.net/standards/detail/opendrive/ (accessed on 17 June 2020).
- RoadXML—Road Network Description, XML Format Specification, Version 3.0.0. 2020. Available online: https://www.road-xml.org/download/roadformatspec/RoadXML_FormatSpecification3.0.0.pdf (accessed on 17 June 2020).
- Fellendorf, M.; Vortisch, P. Microscopic traffic flow simulator VISSIM. In Fundamentals of Traffic Simulation; Springer: New York, NY, USA, 2010; pp. 63–93. [Google Scholar]
- Ruhdorfer, R. Kopplung von Verkehrssimulation und semantischen 3D Stadtmodellen. Master’s Thesis, Technical University of Munich, München, Germany, 2017. Available online: https://mediatum.ub.tum.de/604993?query=ruhdorfer&show_id=1396796 (accessed on 17 June 2020).
- Rauh, J. OpenCRG—The new open standard to represent high precision 3D road data in vehicle simulation tasks on rough roads for handling, ride comfort, and durability load analyses. In Proceedings of the 21st International Symposium Dynamics of Vehicles on Roads and Tracks IAVSD, Stockholm, Sweden, 17–21 August 2009; pp. 17–21. [Google Scholar]
- Association for Standardisation of Automation and Measuring Systems e.V. (ASAM). ASAM OpenCRG, Version 1.1.2. 2018. Available online: https://www.asam.net/standards/detail/opencrg/ (accessed on 17 June 2020).
- Association for Standardisation of Automation and Measuring Systems e.V. (ASAM). ASAM OpenScenario, Version 1.0.0. 2020. Available online: https://www.asam.net/standards/detail/openscenario/ (accessed on 17 June 2020).
- INSPIRE. Thematic Working Group Transport N.: D2.8.I.7 Data Specification on Transport Networks—Technical Guidelines. Version 3.2. 2014. Available online: http://inspire.ec.europa.eu/id/document/tg/tn (accessed on 17 June 2020).
- Haklay, M.; Weber, P. OpenStreetMap: User-Generated Street Maps. IEEE Pervasive Comput. 2008, 7, 12–18. [Google Scholar] [CrossRef] [Green Version]
- Helbich, M.; Amelunxen, C.; Neis, P.; Zipf, A. Investigations on locational accuracy of volunteered geographic information using OpenStreetMap data. In Proceedings of the GIScience 2010, Zurich, Switzerland, 14–17 September 2010; pp. 14–17. [Google Scholar]
- Gröger, G.; Kolbe, T.H.; Nagel, C.; Häfele, K.-H. Open Geospatial Consortium (OGC) City Geography Markup Language (CityGML) Encoding Standard. OGC 12-019. 2012. Available online: https://www.ogc.org/standards/citygml (accessed on 17 June 2020).
- BASt. Objektkatalog für das Straßen-und Verkehrswesen, Version 2.019. Bundesanstalt für Straßenwesen. 2019. Available online: http://www.okstra.de/docs/2019/html/index.htm (accessed on 17 June 2020).
- BMVI. Anweisung Straßeninformationsbank Kernsystem Version 2.04. Bundesministerium für Verkehr und Digitale Infrastruktur. 2014. Available online: https://www.bast.de/BASt_2017/DE/Publikationen/Regelwerke/Verkehrstechnik/Unterseiten/V-ASB.html (accessed on 17 June 2020).
- ISO 19107. In Geographic Information—Spatial Schema; International Organization for Standardization: Geneva, Switzerland, 2013.
- ISO 19107. In Geographic Information—Rules for Application Schema; International Organization for Standardization: Geneva, Switzerland, 2015.
- Gilbert, T.; Rönsdorf, C.; Plume, J.; Simmons, S.; Nisbet, N.; Gruler, H.C.; Kolbe, T.H.; van Berlo, L.; Mercer, A. Built Environment Data Standards and Their Integration: An Analysis of IFC, CityGML and LandInfra; Open Geospatial Consortium: Wayland, MA, USA; buildingSMART International: London, UK, 2020. [Google Scholar]
- Park, S.H.; Jang, Y.-H.; Geem, Z.W.; Lee, S.-H. CityGML-Based Road Information Model for Route Optimization of Snow-Removal Vehicle. ISPRS Int. J. Geo-Inf. 2019, 8, 588. [Google Scholar] [CrossRef] [Green Version]
- Strassenburg-Kleciak, M. OpenStreetMap—Straßen als Flächen erfassen. In gis.Business 2/2016; Dr. med. Gerd Wichmann: Offenbach, Germany, 2016. [Google Scholar]
- Ross, L. Virtual 3D City Models in Urban Land Management—Technologies and Applications. Ph.D. Thesis, Technical University of Berlin, Berlin, Germany, 2010. Available online: https://depositonce.tu-berlin.de/handle/11303/3041 (accessed on 17 June 2020).
- Sindram, M.; Kolbe, T.H. Modeling of urban planning actions by complex transactions on semantic 3D city models. In Proceedings of the International Environmental Modelling and Software Society (iEMSs), San Diego, CA, USA, 15–19 June 2014; Available online: https://mediatum.ub.tum.de/doc/1224665/file.pdf (accessed on 17 June 2020).
- Döllner, J.; Kleinschmit, B. Endbericht zum “Vorhaben Flächeninformationssysteme auf Basis virtueller 3D-Stadtmodelle”-REFINA3D/Deutsches Institut für Urbanistik—Forschungsbericht (In German). 2009. Available online: https://docplayer.org/16160132-Endbericht-zum-refina-forschungsvorhaben-flaecheninformationssysteme-auf-basis-virtueller-3d-stadtmodelle.html (accessed on 12 October 2020).
- Bock, S.; Hinzen, A.; Libbe, J. Deutsches Institut für Urbanistik: Nachhaltiges Flächenmanagement—Ein Handbuch aus der Praxis. Ergebnisse aus der REFINA-Forschung (In German). 2011. Available online: https://repository.difu.de/jspui/handle/difu/127284 (accessed on 17 June 2020).
- Zhao, B.; Silva, E.; Soga, K. Pavement degradation: A city-scale model for San Francisco, USA. Proc. Inst. Civ. Eng. Smart Infrastruct. Constr. 2018, 171, 93–109. [Google Scholar] [CrossRef] [Green Version]
- Kolbe, T.H.; Gröger, G.; Plumer, L. CityGML. 3D city models and their potential for emergency response. In Geospatial Information Technology for Emergency Response; Zlatanova, S., Li, J., Eds.; CRC Press: Boca Raton, FL, USA, 2008; pp. 257–274. [Google Scholar]
- Becker, T.; Nagel, C.; Kolbe, T.H. Semantic 3D modeling of multi-utility networks in cities for analyses and 3D visualization. In Progress and New Trends in 3D Geoinformation Sciences; Springer: Berlin/Heidelberg, Germany, 2013; pp. 41–62. [Google Scholar]
- Boschert, S.; Rosen, R. Digital twin—The simulation aspect. In Mechatronic Futures; Hehenberger, P., Bradley, D., Eds.; Springer: Cham, Switzerland, 2016; pp. 59–74. [Google Scholar]
- Dembski, F.; Wössner, U.; Letzgus, M.; Ruddat, M.; Yamu, C. Urban Digital Twins for Smart Cities and Citizens: The Case Study of Herrenberg, Germany. Sustainability 2020, 12, 2307. [Google Scholar] [CrossRef] [Green Version]
- Batty, M. Digital twins. Environment and Planning B. Urban Anal. City Sci. 2018, 45, 817–820. [Google Scholar]
- Richter, A.; Löwner, M.O.; Ebendt, R.; Scholz, M. Towards an integrated urban development considering novel intelligent transportation systems: Urban Development Considering Novel Transport. Tech. Forecast Soc. Chang. 2020, 155, 119970. [Google Scholar] [CrossRef]
- Randt, B.; Bildstein, F.; Kolbe, T.H. Use of virtual 3d landscapes for emergency driver training. In Proceedings of the Presented at the 2007 IMAGE Conference, Scottsdale, AZ, USA, 10–12 July 2007. [Google Scholar]
- Keler, A.; Kaths, J.; Chucholowski, F.; Chucholowski, M.; Grigoropoulos, G.; Spangler, M.; Busch, F. A bicycle simulator for experiencing microscopic traffic flow simulation in urban environments. In Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018; pp. 3020–3023. [Google Scholar]
- Butz, T.; Ehmann, M.; von Stryk, O.; Wolter, T.M. Realistic road modelling for the real-time simulation of vehicle dynamics. ATZ Worldwide 2004, 106, 11–13. [Google Scholar] [CrossRef]
- Ruhdorfer, R.; Willenborg, B.; Sindram, M. Coupling of Traffic Simulations and Semantic 3D City Models. Gis. Sci. 2018, 3, 101–109. [Google Scholar]
- Wilkie, D.; Sewall, J.; Lin, M.C. Transforming GIS data into functional road models for large-scale traffic simulation. IEEE Trans. Vis. Comput. Graph. 2011, 18, 890–901. [Google Scholar] [CrossRef] [Green Version]
- Chao, Q.; Bi, H.; Li, W.; Mao, T.; Wang, Z.; Lin, M.C.; Deng, Z. A survey on visual traffic simulation: Models, evaluations, and applications in autonomous driving. Comput. Graph. Forum 2019, 39, 287–308. [Google Scholar] [CrossRef]
- Wheeler, B.; Syzdykbayev, M.; Karimi, H.A.; Raanan, G.; Yanbo, W. Personalized accessible wayfinding for people with disabilities through standards and open geospatial platforms in smart cities. Open Geospat. Data Softw. Stand. 2020, 5, 1–15. [Google Scholar]
- Bassani, M.; Grasso, N.; Piras, M. 3D GIS based evaluation of the available sight distance to assess safety of urban roads. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, XL-3/W3, 137–143. [Google Scholar] [CrossRef] [Green Version]
- Ghassoun, Y.; Löwner, M.-O.; Weber, S. Exploring the benefits of 3D city models in the field of urban particles distribution modelling—A comparison of model results. In 3D Geoinformation Science; Springer: Cham, Switzerland, 2015; pp. 193–205. [Google Scholar]
- Brand, L.; Löwner, M.-O. Parametrisierung und Identifikation urbaner Straßenkreuzungen im Kontext der Feinstaubmodellierung (In German). Parameterization and Identification of Street Crossings in the Context of Fine Dust Modelling. Gemeinsame Jahrestagung, DGPF Tagungsband 23/2014; 26–28 March 2014. Available online: https://www.dgpf.de/src/tagung/jt2014/proceedings/index.html (accessed on 12 October 2020).
- Lu, L.; Becker, T.; Löwner, M.-O. 3D complete traffic noise analyses based on CityGML. In Advances in 3D Geoinformation; Springer: Cham, Switzerland, 2017; pp. 265–283. [Google Scholar]
- Schulte, C.; Coors, V. Development of a CityGML ADE for dynamic 3D flood information. In Proceedings of the Joint ISCRAM-CHINA and GI4DM Conference on Information Systems for Crisis Management, Harbin, China, 4–6 August 2008. [Google Scholar]
- Amirebrahimi, S.; Rajabifard, A.; Mendis, P.; Ngo, T. A data model for integrating GIS and BIM for assessment and 3D visualisation of flood damage to building. Locate 2015, 15, 10–12. [Google Scholar]
- Fiutak, G.; Marx, C.; Willkomm, P.; Donaubauer, A.; Kolbe, T.H. Automatisierte Generierung eines digitalen Landschaftsmodells in 3D (in German). In PFGK18-Photogrammetrie-Fernerkundung-Geoinformatik-Kartographie; Jahrestagung in München: München, Germany, 2018; pp. 888–902. Available online: https://www.dgpf.de/src/tagung/jt2018/proceedings/start.html (accessed on 12 October 2020).
- ISO 19152:2012. In Geographic Information—Land Administration Domain Model (LADM); International Organization for Standardization: Geneva, Switzerland, 2012.
- Lemmen, C.; Van Oosterom, P.; Bennett, R. The Land Administration Domain Model. Land Use Policy 2015, 49, 535–545. [Google Scholar] [CrossRef] [Green Version]
- Stoter, J.; Vallet, B.; Lithen, T.; Pla, M.; Wozniak, P.; Kellenberger, T.; Ledoux, H. State-of-the-art of 3D national mapping in 2016. Int. Arch. Photogramm. Rem. Sens. Spat. Inf. Sci. 2016, 41, 653. [Google Scholar] [CrossRef]
- Gristina, S.; Ellul, C.; Scianna, A. Developing a 3d road cadastral system: Comparing legal requirements and user needs. ISPRS Ann. Photogramm. Remote. Sens. Spat. Inf. Sci. 2016, 4, 223–231. [Google Scholar] [CrossRef] [Green Version]
- Furda, A.; Vlacic, L. An object-oriented design of a world model for autonomous city vehicles. In Proceedings of the 2010 IEEE Intelligent Vehicles Symposium, La Jolla, CA, USA, 21–24 June 2010; pp. 1054–1059. [Google Scholar]
- Tamminga, G.; van den Brink, L.; van Lint, H.; Stoter, J.; Hogendoorn, S. Towards GIS-Compliant Data Structures for Traffic and Transportation Models. In Transportation Research Board 92nd Annual Meeting 2013; Transportation Data Interoperability: Washington, DC, USA, 2013; p. 18. [Google Scholar]
- Kutzner, T.; Hijazi, I.; Kolbe, T.H. Semantic Modelling of 3D Multi-Utility Networks for Urban Analyses and Simulations. Int. J. 3-D Inf. Model. 2018, 7, 1–34. [Google Scholar] [CrossRef] [Green Version]
- Open Geospatial Consortium CityGML SWG, CityGML3.0 Conceptual Model—GitHub Repository. Available online: https://github.com/opengeospatial/CityGML-3.0CM (accessed on 17 June 2020).
- Kutzner, T.; Kolbe, T.H. CityGML 3.0: Sneak preview. In PFGK18-Photogrammetrie-Fernerkundung-Geoinformatik-Kartographie; Jahrestagung in München: München, Germany, 2018; pp. 835–839. Available online: https://www.dgpf.de/src/tagung/jt2018/proceedings/start.html (accessed on 12 October 2020).
- Şerbu, C.; Opruţa, D.; Socaciu, L. Ranking the types of intersections for assessing the safety of pedestrians using TOPSIS method. Leonardo Electron. J. Pract. Technol. 2014, 25, 242–253. Available online: http://lejpt.academicdirect.org/A25/242_253.pdf (accessed on 17 June 2020).
- Löwner, M.O.; Gröger, G.; Benner, J.; Biljecki, F.; Nagel, C. Proposal for a new LoD and multi-Representation Concept for CityGML. ISPRS Ann. Photogramm. Remote Sens. Spatial Inf. Sci. 2016, IV-2/W1, 3–12. [Google Scholar]
- Chaturvedi, K.; Smyth, C.S.; Gesquière, G.; Kutzner, T.; Kolbe, T.H. Managing versions and history within semantic 3D city models for the next generation of CityGML. In Advances in 3D Geoinformation; Springer: Cham, Switzerland, 2017; pp. 191–206. [Google Scholar]
- Chaturvedi, K.; Kolbe, T.H. Dynamizers-Modeling and implementing dynamic properties for semantic 3D city models. In Eurographics Workshop on Urban Data Modelling and Visualisation; The Eurographics Association: Delft, The Netherlands, 2015. [Google Scholar]
- Kolbe, T.H.; Yao, Z.; Nagel, C.; Redweik, R.; Willkomm, P.; Hurda, G.; Müftüoglu, A.; Kunde, F. 3D City Database for CityGML Version 3.3.0 Documentation. 2016. Available online: www.3dcitydb.org (accessed on 17 June 2020).
- Yao, Z.; Nagel, C.; Kunde, F.; Hudra, G.; Willkomm, P.; Donaubauer, A.; Adolphi, T.; Kolbe, T.H. 3DCityDB—A 3D geodatabase solution for the management, analysis, and visualization of semantic 3D city models based on CityGML. Open Geospat. Data, Softw. Stand. 2018, 3, 1–26. [Google Scholar] [CrossRef] [Green Version]
- Soon, K.H.; Khoo, V.H.S. Citygml modelling for singapore 3d national mapping. ISPRS Int. Arch. Photogramm. Remote. Sens. Spat. Inf. Sci. 2017, 42, 37–42. [Google Scholar] [CrossRef] [Green Version]
- Robles-Ortega, M.D.; Ortega, L.M.; Coelho, A.; Feito, F.R.; De Sousa, A. Automatic Street Surface Modeling for Web-Based Urban Information Systems. J. Urban Plan. Dev. 2013, 139, 40–48. [Google Scholar] [CrossRef]
- Coduro, T. Straßenraummodellierung Mittels Mobile Mapping in OpenDRIVE und CityGML sowie Entwicklung Geeigneter Visualisierungsmethoden (In German). Master’s Thesis, Technical University of Munich, München, Germany, 2018. Available online: https://mediatum.ub.tum.de/1451954 (accessed on 17 June 2020).
- Kielar, P.M.; Biedermann, D.H.; Borrmann, A. MomenTUMv2: A Moudlar, Extensible, and Generic Agent-Based Pedestrian Behavoir Simulation Framework; Technical University of Munich, Department of Civil, Geo and Environmental Engineering: Munich, Germany, 2016. [Google Scholar]
- Bornstein, R.D. Observations of the urban heat island effect in New York City. J. Appl. Meteorol. 1968, 7, 575–582. [Google Scholar] [CrossRef]
- Chaturvedi, K.; Willenborg, B.; Sindram, M.; Kolbe, T.H. Solar potential analyses and integration of the time-dependent simulation results for semantic 3D city models using Dynamizers. In Proceedings of the 12th International 3D GeoInfo Conference, Melbourne, Australia, 26–27 October 2017; pp. 25–32. [Google Scholar]
- Bui, Q.; White, J. Mapping the Shadows of New York City: Every Building Every Block. New York Times, 21 December 2016. Available online: https://www.nytimes.com/interactive/2016/12/21/upshot/Mapping-the-Shadows-of-New-York-City.html (accessed on 17 June 2020).


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| LandInfra | INSPIRE | OSM | GDF5.0 | OKSTRA | OpenDRIVE | RoadXML | Vissim | CityGML2.0 | |
|---|---|---|---|---|---|---|---|---|---|
| Geometry | |||||||||
| Coordinate Space | 3D | 2.5D | 2D | 3D | 3D | 3D | 3D | 3D | 3D |
| Straight line segments | 🗸 | 🗸 | 🗸 | 🗸 | 🗸 | 🗸 | 🗸 | 🗸 | 🗸 |
| Splines | 🗸 | - | - | - | 🗸 | 🗸 | 🗸 | - | - * |
| Clothoids | 🗸 | - | - | - | 🗸 | 🗸 | 🗸 | - | - * |
| Areal Rep. | 🗸 | 🗸 | - | a | 🗸 | - | b | 🗸 | 🗸 |
| Parametric Rep. | 🗸 | 🗸 | - | 🗸 | 🗸 | 🗸 | 🗸 | 🗸 | - |
| Semantics | |||||||||
| Surface Material | 🗸 | 🗸 | 🗸 | 🗸 | 🗸 | 🗸 | 🗸 | 🗸 | 🗸 |
| Function | 🗸 | 🗸 | 🗸 | 🗸 | 🗸 | 🗸 | 🗸 | 🗸 | 🗸 |
| Driving Ways | 🗸 | 🗸 | 🗸 | 🗸 | 🗸 | - | - | 🗸 | c * |
| Driving Lanes | 🗸 | - | - | - | 🗸 | 🗸 | 🗸 | 🗸 | 🗸 |
| Driving Direction | - | 🗸 | 🗸 | 🗸 | 🗸 | 🗸 | 🗸 | 🗸 | d * |
| Traffic Logic | - | 🗸 | e | 🗸 | 🗸 | 🗸 | 🗸 | 🗸 | - * |
| Bridge Model | 🗸 | f | g | h | 🗸 | i | - | - | 🗸 |
| Tunnel Model | 🗸 | f | g | h | 🗸 | i | - | - | 🗸 |
| Road Marking | 🗸 | - | - | 🗸 | j | 🗸 | 🗸 | 🗸 | 🗸 |
| Street Furniture | - | - | - | 🗸 | 🗸 | 🗸 | 🗸 | 🗸 | 🗸 |
| Vegetation Objects | 🗸 | 🗸 | 🗸 | 🗸 | 🗸 | k | - | - | 🗸 |
| Multiple Traffic Types | 🗸 | 🗸 | 🗸 | 🗸 | 🗸 | k | - | 🗸 | 🗸 |
| Level of Detail | - | - | - | 🗸 | - | - | - | - | 🗸 |
| Topology | |||||||||
| Linear Referencing | 🗸 | 🗸 | - | 🗸 | 🗸 | 🗸 | 🗸 | 🗸 | - |
| Road/Lane Linkage | - | - | - | 🗸 | 🗸 | 🗸 | 🗸 | 🗸 | - * |
| Appearance | |||||||||
| Texture | - | - | - | l | - | - | 🗸 | 🗸 | 🗸 |
| Other aspects | |||||||||
| Main Application/Purpose | Land and civil enginee-ring | EU harmon. data integration | Gen. of open maps | Navigation | Road doc. and asset mngmt | Driving simulation | Driving simulation | Traffic simulation | City models and their applications |
| Encoding | GML/ XML | GML/ XML | XML | XML binary | GML/ XML | XML | XML | XML | GML/ XML |
| Developer/Issuer | OGC | EU Com. | OSM | ISO/TC204 | BMVI | ASAM | OKTAL | PTV | OGC |
| Legend | Fully available | Limited availability | Not available | ||||||
| Modelling Aspects | Support in CityGML3.0 |
|---|---|
| (1) Thematic resolution | Section/Intersection concept, 3 levels of thematic granularity down to lane-level accuracy |
| (2) Geometric resolution | Representations of streetspace objects with linear, areal, volumetric or point cloud geometries available, LoD concept, highly accurate (explicit) real-world geometries (in contrast to parametric representations), spaces concept, (3 levels of granularity) |
| (3) 3D positional accuracy | Arbitrary coordinate systems, Accuracy also depending on underlying modelling framework |
| (4) Network and areal topology | Predecessor/Successor concept, graph- or areal networks possible |
| (5) Topicality and evolution | Depending on available data, Versioning Module available |
| (6) Dynamic and real-time information | Dynamizer Module for representing time-dependent properties |
| (7) Visualization | Appearance Module (colors, texture), Open Source Software, non-redundant geometric and topologic representations (e.g., important to avoid z-fighting) |
| CityGML Class | No. of Objects | Data Size (Compressed. zip) |
|---|---|---|
| Curb | 126,626 | 2.02 GB |
| Parking Lot Entrance | 24,185 | 5.5 MB |
| Intersection | 22,854 | 7.9 MB |
| Grass | 258 | 0.3 MB |
| Road Marking | 7826 | 3.9 MB |
| Dividing Strips | 8841 | 74.8 MB |
| Roadbed | 72,580 | 134.9 MB |
| Sidewalk | 169,056 | 1.3 GB |
| Parking Lot | 19,951 | 32.2 MB |
| Plaza | 1360 | 5.5 MB |
| Interior Sidewalk | 6205 | 15.8 MB |
| Building | >1,000,000 | 2.4 GB |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Beil, C.; Ruhdorfer, R.; Coduro, T.; Kolbe, T.H. Detailed Streetspace Modelling for Multiple Applications: Discussions on the Proposed CityGML 3.0 Transportation Model. ISPRS Int. J. Geo-Inf. 2020, 9, 603. https://doi.org/10.3390/ijgi9100603
Beil C, Ruhdorfer R, Coduro T, Kolbe TH. Detailed Streetspace Modelling for Multiple Applications: Discussions on the Proposed CityGML 3.0 Transportation Model. ISPRS International Journal of Geo-Information. 2020; 9(10):603. https://doi.org/10.3390/ijgi9100603
Chicago/Turabian StyleBeil, Christof, Roland Ruhdorfer, Theresa Coduro, and Thomas H. Kolbe. 2020. "Detailed Streetspace Modelling for Multiple Applications: Discussions on the Proposed CityGML 3.0 Transportation Model" ISPRS International Journal of Geo-Information 9, no. 10: 603. https://doi.org/10.3390/ijgi9100603