
Abstract
We prove that horospheres, hyperspheres, and hyperplanes in a hyperbolic space \({\mathbb {H}}^n,\,n\ge 3\), admit no perturbations with compact support which increase their mean curvature. This is an extension of the analogous result in the Euclidean spaces, due to M. Gromov, which states that a hyperplane in a Euclidean space \({\mathbb {R}}^n\) admits no mean convex perturbations with compact supports.
Similar content being viewed by others

The content of the present note is motivated by the following nice recent result of Gromov [1].
A hyperplane in a Euclidean space \({\mathbb {R}}^n\) cannot be perturbed on a compact set so that its mean curvature satisfies \(H\ge 0\).
This statement is reminiscent of the scalar curvature rigidity of the flat metric, a corollary of the positive mass theorem, which asserts that the flat metric on \({\mathbb {R}}^n\) cannot be modified on a compact set so that its scalar curvature verifies \(S \ge 0\). Actually, Gromov [1] derived Theorem 1 from the nonexistence of \({\mathbb {Z}}^n\)-invariant metrics with positive scalar curvature on \({\mathbb {R}}^n\). He also gave another direct argument using a symmetrization process.
In what follows, we give another proof of Theorem 1 and an extension to the hyperbolic spaces using a simple argument. More precisely, we prove the following:
Let M denote a horosphere, a hypersphere, or a hyperplane in a hyperbolic space \({\mathbb {H}}^n, n\ge 3\), and \(H_M\ge 0\) its (constant) mean curvature. Let \({\varSigma }\) be a connected properly embedded \({\mathcal {C}}^2\)-hypersurface in \({\mathbb {H}}^n\) which coincides with M outside a compact subset of \({\mathbb {H}}^n\). If the mean curvature of \({\varSigma }\) is \( \ge H_M\), then \({\varSigma }=M\).
We recall that a hyperplane in \({\mathbb {H}}^n\) is a complete totally geodesic hypersurface and a hypersphere is a connected component of the set of points at a fixed distance from a hyperplane.
The proof uses the tangency principle which goes back to E. Hopf. We recall it with some details in what follows. We first fix some notations and conventions.
Let \({\varSigma }\) be an embedded \({\mathcal {C}}^2\)-hypersurface, with a global unit normal \(\nu \), in a smooth complete n-dimensional Riemannian manifold M. We denote by \(\sigma \) the second fundamental form of \({\varSigma }\), which is defined as follows
Here \(\nabla \) denotes the Levi–Civita connection on M. The shape operator S of \({\varSigma }\) is defined as follows
and the (normalized) mean curvature of \({\varSigma }\) is the function
Note that these definitions depend on the choice of the unit normal field \(\nu \). The mean curvature vector field \(\mathbf{H} := H\nu \) is, instead, independent of the choice of the unit normal field. With our conventions, the mean curvature of a unit sphere in the Euclidean space with respect to its interior unit normal is equal to 1.
Let \(p\in {\varSigma }\) and consider local coordinates \((x_1,\ldots ,x_n)\) around p in M so that \(T_p{\varSigma }={\mathbb {R}}^{n-1}\times \{0\}\) and \(\frac{\partial }{\partial x_n}(0)=\nu (p)\). An open neighborhood \({\mathcal {U}}\) of p in \({\varSigma }\) is the graph, in these coordinates, of a \({\mathcal {C}}^2\)-function u defined on an open neighborhood \({\varOmega }\) of the origin in \({\mathbb {R}}^{n-1}\times \{0\}\). The mean curvature of \({\mathcal {U}}\), computed with respect to the unit normal field \(\nu \), is given by a nonlinear elliptic operator of second order
with \({\mathcal {F}}:(x,z, {\xi },\mathbf{s}) \in {\varOmega }\times {\mathcal {V}} \rightarrow {\mathcal {F}} ({ x}, { t},{\xi },\mathbf{s })\) a smooth function defined in \({\varOmega }\times {\mathcal {V}}\) where \({\mathcal {V}}\) is an open subset of \({\mathbb {R}}\times {\mathbb {R}}^n\times {\mathbb {R}}^{n\times n}\).
Let \({\varSigma }_1\) and \( {\varSigma }_2\) be two embedded hypersurfaces in the Riemannian manifold M oriented by global unit normals \(\nu _1\) and \(\nu _2\) respectively and let p be an interior point of both \({\varSigma }_1\) and \({\varSigma }_2\). We say that \({\varSigma }_1\ge {\varSigma }_2\) near p if the following conditions are satisfied:
-
(i)
\(\nu _1(p)=\nu _2(p)\),
-
(ii)
there are local coordinates \((x_1,\dots ,x_n)\) around p in M with \(T_p{\varSigma }_1=T_p{\varSigma }_2={\mathbb {R}}^{n-1}\times \{0\}\) and \(\frac{\partial }{\partial x_n}(0)=\nu _1(p)=\nu _2(p)\), in which \({\varSigma }_1\) and \({\varSigma }_2\) are graphs over an open domain in \({\mathbb {R}}^{n-1}\times \{0\}\) of functions \(u_1\) and \(u_2\) respectively, satisfying \(u_1\ge u_2\).
Suppose that \({\varSigma }_1\ge {\varSigma }_2\) near p and that their mean curvature functions (computed with respect to the given normals), in local coordinates as above, verify the inequality \({\mathcal {M}}(u_1)\le {\mathcal {M}}(u_2)\). The tangency principle asserts that \({\varSigma }_1\) coincides with \({\varSigma }_2\) in a neighborhood of p. The argument goes as follows. Consider the difference function \(u=u_2-u_1\) and set \(u_t=u_1+t(u_2-u_1)\) for \(t\in [0,1]\). To simplify notations, we set \(\mathbf{w }_t=(x,u_t,Du_t,D^2u_t)\). We can write the following:
Here \(\left( \int _0^1 \frac{\partial {\mathcal {F}}}{\partial \xi } (\mathbf{w }_t) dt\right) .Du= \sum _i b_i(x) \,u_{x_i} (x)\) with \(b_i(x):= \int _0^1 \frac{\partial {\mathcal {F}}}{\partial {\xi }_i} (\mathbf{w }_t) dt\), and \(\left( \int _0^1 \frac{\partial {\mathcal {F}}}{\partial \mathbf{s } } (\mathbf{w }_t) dt\right) .D^2u= \sum _{i,j} a_{ij}(x) u_{x_i x_j}(x) \) with \(a_{ij}(x):= \int _0^1 \frac{\partial {\mathcal {F}}}{\partial \mathbf{s }_{i,j} } (\mathbf{w }_t) dt\).
This shows that the \({\mathcal {C}}^2\)-function \(u=u_2-u_1\) satisfies the inequality \(Lu\ge 0\) where L is the linear elliptic operator with continuous coefficients defined by
By assumption, \(u\le 0\) and u vanishes at the origin. The strong maximum principle (see, for instance, [3, Chapter 10, Addendum 2, Corollary 19] or [2, Theorem 2.9]) then shows that \(u\equiv 0\) in a neighborhood of the origin, that is, the hypersurfaces \({\varSigma }_1\) and \({\varSigma }_2\) coincide in a neighborhood of p. We can thus state the tangency principle in the following form:
Tangency principle. Let \({\varSigma }_1\) and \({\varSigma }_2\) be two embedded \({\mathcal {C}}^2\)-hypersurfaces in a smooth Riemannian manifold M, oriented by global unit normals. Suppose the mean curvature functions \(H_1\) and \(H_2\) of \({\varSigma }_1\) and \({\varSigma }_2\) respectively satisfy the condition \(\inf H_2\ge \sup H_1\). Let p be an interior point of both \({\varSigma }_1\) and \({\varSigma }_2\). If \({\varSigma }_1\ge {\varSigma }_2\) near p, then \({\varSigma }_1\) coincides with \({\varSigma }_2\) in a neighborhood of p.
We can now prove Theorem 2. We will work with the halfspace model of \({\mathbb {H}}^n\), that is,
endowed with the metric
Let \(P_0\) be a hyperplane in \({\mathbb {H}}^n\). Without loss of generality, we may assume that \(P_0\) is the hyperplane \(\{x_1=0, x_n>0\}\). For \(t\in {\mathbb {R}}\), we let \(P_t\) denote the hyperplane \(\{x_1=t, x_n>0\}\).
Let \({\varSigma }\) be a properly embedded \({\mathcal {C}}^2\)-hypersurface in \({\mathbb {H}}^n\) which coincides with \(P_0\) outside a compact subset of \({\mathbb {H}}^n\). Suppose its mean curvature verifies \(H_{{\varSigma }}\ge 0\). \({\varSigma }\) separates \({\mathbb {H}}^n\) into 2 connected components, a mean convex one \(V_+\) and a mean concave one \(V_-\). We may assume that \(V_+\) coincides with the domain \( \{x_1> 0, x_n>0\}\) outside a compact set; the other case being similar. There is a largest \(T\ge 0\) verifying \({\varSigma }\cap P_T\ne \emptyset \). We orient \(P_T\) by its unit normal field pointing in the direction \(x_1>0\). The hypersurfaces \({\varSigma }\) and \(P_T\) are both closed subsets of \({\mathbb {H}}^n\), so their intersection \({\varSigma }\cap P_T\) is closed in \({\varSigma }\). Let us show that it is also open in \({\varSigma }\). Take a point \(p\in {\varSigma }\cap P_T\). Then the normal to \({\varSigma }\) at p points in the direction \(x_1>0\) (since we assumed \(V_+\) coincides with the domain \( \{x_1> 0, x_n>0\}\) outside a compact set) and \({\varSigma }\le P_{T}\) near p. As \(H_{{\varSigma }}\ge 0\), the tangency principle shows that \({\varSigma }\) coincides with \( P_{T}\) in a neighborhood of p. This shows that \({\varSigma }\cap P_{T}\) is open in \({\varSigma }\) and since it is also closed, we conclude that \({\varSigma }=P_{T}\) and \(T=0\).
Consider now the case of a horosphere which we may suppose, without loss of generality, is the horosphere \({\mathcal {H}}_1= \{x_n=1\}\). We also consider the family of horospheres \({\mathcal {H}}_t=\{x_n=t\}, \, t>0\), having the same asymptotic boundary as \({\mathcal {H}}_1\). We orient the horospheres \({\mathcal {H}}_t\) by their upward pointing unit normal. For this choice of orientation, their mean curvature is equal to one.
Let \({\varSigma }\) be a properly embedded \({\mathcal {C}}^2\)-hypersurface in \({\mathbb {H}}^n\) which coincides with \({\mathcal {H}}_1\) outside a compact subset of \({\mathbb {H}}^n\) and having mean curvature \(\ge 1. \) \({\varSigma }\) divides \({\mathbb {H}}^n\) into 2 components. The mean convex one coincides with the domain \(\{x_n>1\}\) outside a compact set since \({\varSigma }\) asymptotically coincides with \({\mathcal {H}}_1\). There is a largest \(T\ge 1\) such that \({\varSigma }\cap {\mathcal {H}}_T\ne \emptyset \). At a point \(p\in {\varSigma }\cap {\mathcal {H}}_T\), the unit normals to \({\varSigma }\) and the horopshere \({\mathcal {H}}_T\) coincide and \({\varSigma }\le {\mathcal {H}}_T\) near p. As \(H_{{\varSigma }}\ge 1\), the tangency principle shows that \({\varSigma }\) coincides with \({\mathcal {H}}_T\) in a neighborhood of p. So the set \({\varSigma }\cap {\mathcal {H}}_T\) is open in \({\varSigma }\) and since it is also closed, we conclude that \({\varSigma }\) coincides with the horosphere \({\mathcal {H}}_T\) and that \(T=1\).
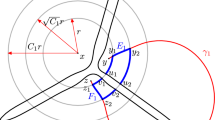
We consider now the case of hyperspheres. Let us denote, this time, the hyperplane \(\{x_1=0, x_n>0\}\) by \(S_0\). For \(\beta \in (-\frac{\pi }{2},\frac{\pi }{2})\), we let \(S_{\beta }\) be the intersection of the hyperplane \(P_{\beta }\) in \({\mathbb {R}}^n\) of equation \(\cos \beta \, x_1=\sin \beta \, x_n\) with \(\mathbb {H} ^n\). Note that \(\beta \) is the oriented angle between \(P_{\beta }\) and \(P_0\). \(S_{\beta }\) is equidistant from \(S_0\), the distance between them being equal to \(\log \frac{1+|\sin \beta |}{\cos \beta }\). We orient \(S_\beta \) by the normals pointing in the same direction as the vector \(-\cos \beta \,\mathbf{e }_1+\sin \beta \,\mathbf{e }_n\), where \(\mathbf{e }_1,\dots ,\mathbf{e }_n\) is the canonical basis in \({\mathbb {R}}^n. \) For this choice of orientation, the mean curvature of \(S_\beta \) is given by \(H_\beta = \sin \beta \).

Given a hypersphere in \({\mathbb {H}}^n\), it is congruent to \(S_{\beta _0}\) for some \(\beta _0\in (0, \frac{\pi }{2})\). Let \({\varSigma }\) be a properly embedded \({\mathcal {C}}^2\)-hypersurface in \({\mathbb {H}}^n\) which coincides with \(S_{\beta _0} \) outside a compact set and having mean curvature \(H_{{\varSigma }} \ge \sin \beta _0\). \({\varSigma }\) separates \({\mathbb {H}}^n\) in 2 components and the mean convex one coincides, outside a compact set, with the mean convex domain bounded by \(S_{\beta _0}\). There is a smallest \(\beta \in (-\frac{\pi }{2},\beta _0]\) so that \({\varSigma }\cap S_\beta \ne \emptyset \). At a point \(p\in {\varSigma }\cap S_\beta \), the unit normals to \(S_\beta \) and \({\varSigma }\) coincide, \({\varSigma }\le S_\beta \) near p, and \(H_{\varSigma }\ge \sin {\beta _0}\ge \sin \beta =H_\beta \). By the tangency principle, we know that \({\varSigma }\) and \(S_\beta \) coincide in a neighborhood of p. This shows that the intersection \({\varSigma }\cap S_\beta \) is open in \({\varSigma }\). As it is also closed, we conclude that \({\varSigma }=S_\beta \) and also that \(\beta =\beta _0\).
This completes the proof of Theorem 2. To prove Theorem 1, one uses, as in the case of a hyperplane in \({\mathbb {H}}^n\), the family of hyperplanes parallel to the given deformed hyperplane.
To conclude, we note that the argument above can also be used to obtain analogous rigidity results for hypersurfaces in other ambient manifolds. Consider, for instance, a product manifold \(M\times {\mathbb {R}}\) where M is a connected noncompact orientable manifold without boundary. Suppose \(M\times {\mathbb {R}}\) is equipped with a Riemannian metric so that \(M_t=M\times \{t\}\) has constant mean curvature for each \(t\ge 0\). Call \(H_t\) the mean curvature of \(M_t\) computed with respect to the unit normal field pointing into the domain \(M\times [t,+\infty )\) and suppose that the function \(t\in [0,+\infty ) \rightarrow H_t\) is nonincreasing. Then, proceeding as above, one shows that, for each \(t_0\ge 0\), if \({\varSigma }\) is a connected properly embedded hypersurface which coincides with \(M_{t_0}\) outside a compact subset of \(M\times {\mathbb {R}}\) and has mean curvature \(H_{{\varSigma }}\ge H_{t_0}\), then \({\varSigma }=M_{t_0}\).
This gives an extension of Theorems 1 and 2 to the more general case of warped product metrics. Consider a metric on \({\mathbb {R}}\times M\), of the form \(dt^2+ f(t)^2ds^2_M\), where M is as above, \(ds^2_M\) is a complete metric on it, and f a smooth positive function on \({\mathbb {R}}\). The mean curvature vector field \({\mathbf{H }}_t\) of \(M_t\) is given by
Thus, orienting \(M_t\) by the field \(\frac{\partial }{\partial t}\), its mean curvature is \(H_t= -\frac{f^\prime (t)}{f(t)}=-(\ln f(t))^\prime \). So, if f is a log-convex function, one cannot increase the mean curvature of the slices \(M_t\) by modifying them on compact subsets.
References
Gromov, M.: Mean curvature in the light of scalar curvature. Ann. Inst. Fourier (Grenoble) 69(7), 3169–3194 (2019)
Kazdan, J.: Applications of partial differential equations to problems in geometry (1993). https://www.math.upenn.edu/~kazdan/
Spivak, M.: A Comprehensive Introduction to Differential Geometry, vol. V, Third edn. Publish or Perish Inc, Houston (1999)
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Souam, R. Mean curvature rigidity of horospheres, hyperspheres, and hyperplanes. Arch. Math. 116, 115–120 (2021). https://doi.org/10.1007/s00013-020-01529-1
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00013-020-01529-1