
Abstract
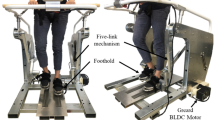
This paper describes the development and evaluation of a newly developed end-effector type rehabilitation robot named DDgo Pro. In order to induce normal walking pattern, a five-link mechanism was designed to follow normal walking trajectory. In order to implement the rehabilitation training feature, the core technologies of the drive unit consisting of freewheel and BLDC motor, the construction of the robot control system, and the algorithms of the three training modes in DDgo Pro were addressed in detail. Among the three training modes, Passive Mode makes the robot to fully guide normal walking pattern, and to help patients gain muscle strength in their lower body. In Active Assisted Mode, patients who have learned Passive Mode are able to perform active rehabilitation training for a long time while receiving muscle assistance from the robot in proportion to their walking intentions. Active mode was designed for patients to perform rehabilitation training for themselves with minimal help from the robot. In order to test muscle assisted performance of the newly developed rehabilitation robot, muscle activity in each training mode was measured using Electromyography for healthy people. In addition, gait dynamics was analyzed to check whether DDgo Pro help stroke patients correct their walking patterns.




















Similar content being viewed by others

References
Centers for Disease Control and Prevention (2003). Trends in aging—United States and worldwide. Morbidity and Mortality Weekly Report, 52(6), 101–104, 106.
Fiser, W. M., Hays, N. P., Rogers, S. C., Kajkenova, O., Williams, A. E., Evans, C. M., et al. (2010). Energetics of walking in elderly people: Factors related to gait speed. The Journals of Gerontology: Series A, 65A(12), 1332–1337.
Kim, M. J., Lee, S. A., Kim, S. K., & Sung, I. Y. (1994). The study for gait speed of stroke patients: Comfortable versus maximum safe speed. Journal of the Korean Academy of Rehabilitation Medicine, 18(4), 736–741.
Cho, H. Y., Kim, D. H., & Kim, Y. S. (2013). Effect of imagery training on balance, gait ability and cognition function in patients with Parkinson’s disease. Journal of Sport and Leisure Studies, 54, 1017–1028.
Suh, Y. O. (1999). Effects of rehabilitation program on functional recovery in stroke patients. Journal of Korean Academy of Nursing, 29(3), 665–678.
Yang, C. S., & Lim, B. O. (2013). Effect of rehabilitation training program on gait for people with Parkinson disease. The Korean Journal of Physical Education, 52(3), 507–516.
Song, W. K. (2016). Trends in rehabilitation robots and their translational research in National Rehabilitation Center, Korea. Biomedical Engineering Letters, 6, 1–9.
Chang, M. C., & Chun, M. H. (2015). Use of robots in rehabilitative treatment. Journal of the Korean Medical Association, 58(2), 141–146.
Chun, M. H., & Yi, J. H. (2013). Robotics in rehabilitation for patients with brain disease. Journal of the Korean Medical Association, 56(1), 23–29.
Hesse, S., & Uhlenbrock, D. (2000). A mechanized gait trainer for restoration of gait. Journal of Rehabilitation Research and Development, 37(6), 701–708.
Bernhardt, M., Frey, M., Colombo, G., & Riener, R. (2005). Hybrid force-position control yields cooperative behaviour of the rehabilitation robot LOKOMAT. In 9th international conference on rehabilitation robotics (pp. 536–539).
Vallery, H., Veneman, J., Van Asseldonk, E., Ekkelenkamp, R., Buss, M., & Van Der Kooij, H. (2008). Compliant actuation of rehabilitation robots. IEEE Robotics & Automation Magazine, 15(3), 60–69.
Yu, H., Huang, S., Chen, G., Pan, Y., & Guo, Z. (2015). Human-robot interaction control of rehabilitation robots with series elastic actuators. IEEE Transactions on Robotics, 31(5), 1089–1100.
Han, J. T., Gong, W. T., & Lee, Y. S. (2009). Comparison of muscle activity with lower extremity during stairs and ramp climbing of old adults by EMG. The Journal Korean Society of Physical Therapy, 21(1), 35–40.
Kim, J. Y., Kim, J. Y., Kim, H. S., & Park, K. W. (2020). Development and evaluation of a hybrid walking rehabilitation robot, DDgo Pro. Retrieved February 20, 2020, from https://youtu.be/IhO104AQM5s.
DiBerardino, L. A., Polk, J. D., Rosengren, K. S., Spencer-Smith, J. B., & Hsiao-Wecksler, E. T. (2010). Quantifying complexity and variability in phase portraits of gait. Clinical Biomechanics, 25(6), 552–556.
Acknowledgements
This study was supported by the Translational Research Program for Rehabilitation Robots (NRCTR-EX18008), the Rehabilitation Research, National Rehabilitation Center, Ministry of Health and Welfare, Korea (IRB No. NRC-2019-03-014). In addition, this work was supported by Incheon National University (International Cooperative) Research Grant in 2018. We also specially thanks to Mr. Han Dong Cho of the Chung-Ang Univ. High School who helped EMG measurement test.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Kim, JY., Kim, JY., Kim, HS. et al. Development and Evaluation of a Hybrid Walking Rehabilitation Robot, DDgo Pro. Int. J. Precis. Eng. Manuf. 21, 2105–2115 (2020). https://doi.org/10.1007/s12541-020-00404-x
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12541-020-00404-x