Estimating Residual Life Distributions of Complex Operational Systems Using a Remaining Maintenance Free Operating Period (RMFOP)-Based Methodology


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Degradation Modelling for System Signals
2.1. Prognosis Definition and Data Preparation
2.2. Model Selection
Model 1: Linear model
Model 2: Exponential model
2.3. Summary of RMFOP-Based Methodology
3. Experiment and Results
3.1. System Layout
3.2. Data Collection
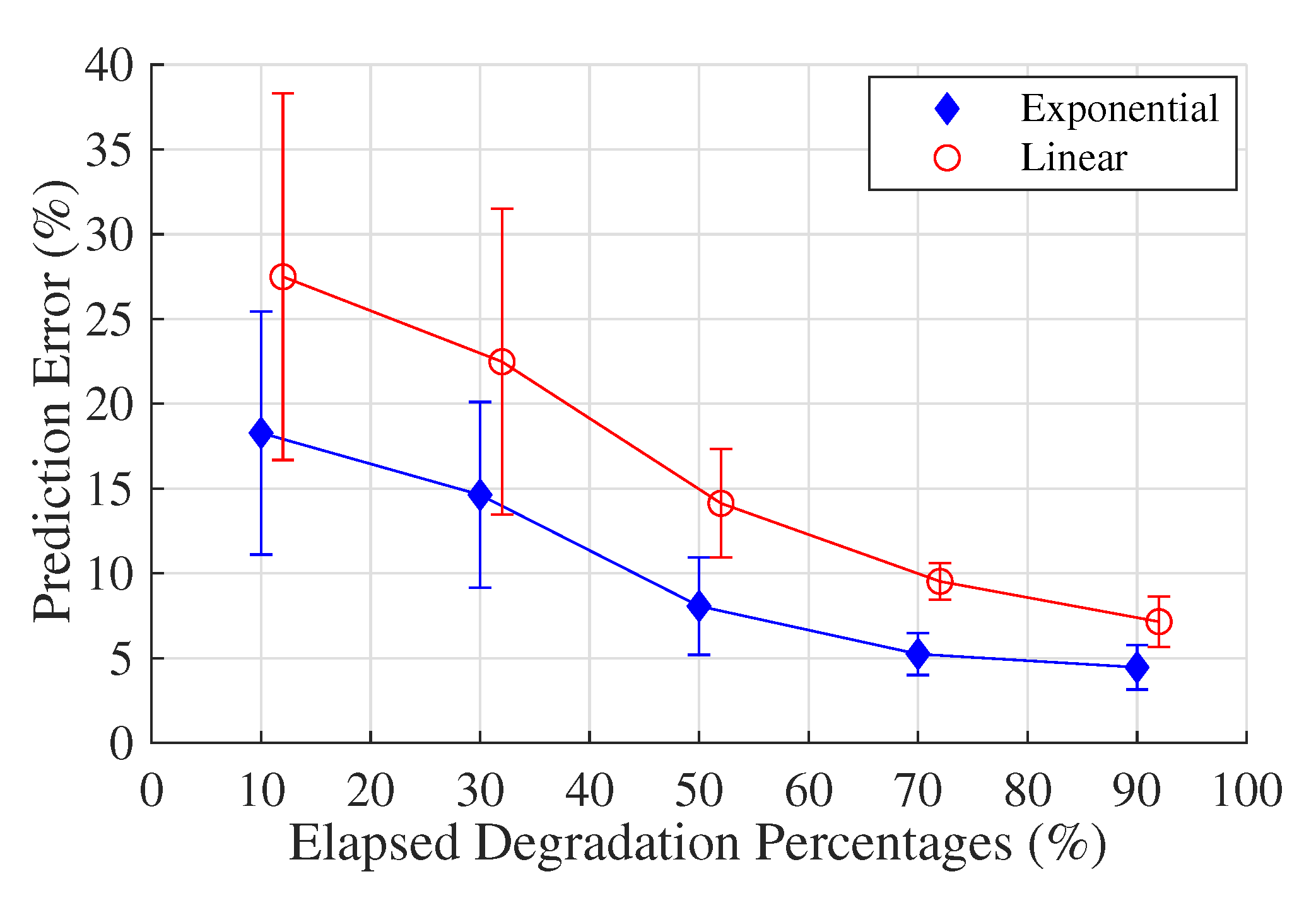
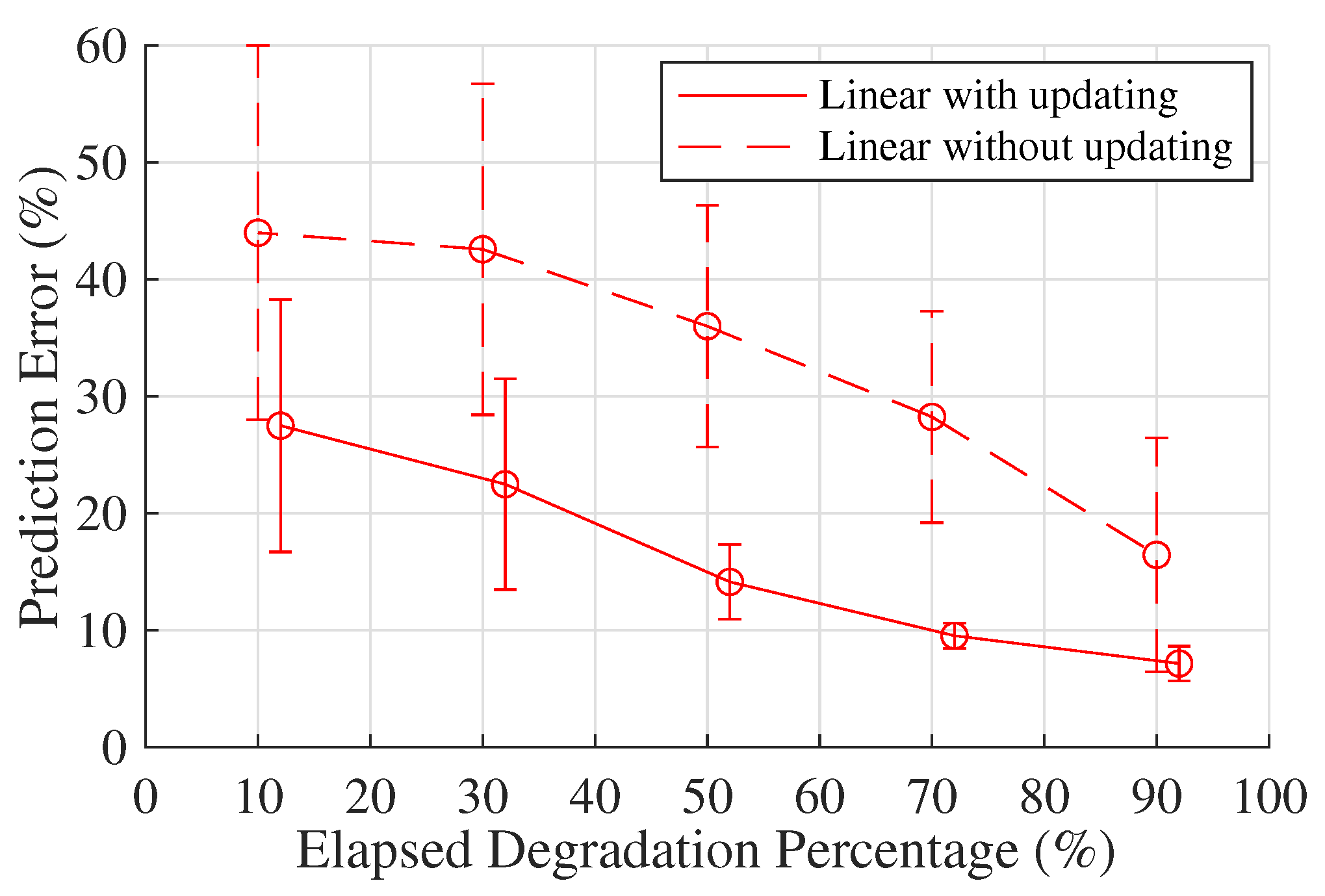
3.3. Results
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Liao, L.; Köttig, F. Review of hybrid prognostics approaches for remaining useful life prediction of engineered systems, and an application to battery life prediction. IEEE Trans. Reliab. 2014, 63, 191–207. [Google Scholar] [CrossRef]
- Elasha, F.; Shanbr, S.; Li, X.; Mba, D. Prognosis of a wind turbine gearbox bearing using supervised machine learning. Sensors 2019, 19, 3092. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Guo, J.; Li, Z.; Li, M. A Review on Prognostics Methods for Engineering Systems. IEEE Trans. Reliab. 2019, 69, 1110–1129. [Google Scholar] [CrossRef]
- Lo, C.C.; Lee, C.H.; Huang, W.C. Prognosis of bearing and gear wears using convolutional neural network with hybrid loss function. Sensors 2020, 20, 3539. [Google Scholar] [CrossRef] [PubMed]
- Zarezadeh, S.; Ashrafi, S. On preventive maintenance of networks with components subject to external shocks. Reliab. Eng. Syst. Saf. 2019, 191, 106559. [Google Scholar] [CrossRef]
- Gebraeel, N.; Elwany, A.; Pan, J. Residual life predictions in the absence of prior degradation knowledge. IEEE Trans. Reliab. 2009, 58, 106–117. [Google Scholar] [CrossRef]
- Blanchard, B.S. System Engineering Management; Wiley: Hoboken, NJ, USA, 2004. [Google Scholar]
- Camci, F.; Eker, O.F.; Başkan, S.; Konur, S. Comparison of sensors and methodologies for effective prognostics on railway turnout systems. Proc. Inst. Mech. Eng. Part F: J. Rail Rapid Transit 2016, 230, 24–42. [Google Scholar] [CrossRef]
- Zhao, F.; Chen, J.; Guo, L.; Li, X. Neuro-fuzzy based condition prediction of bearing health. J. Vib. Control 2009, 15, 1079–1091. [Google Scholar] [CrossRef]
- Gebraeel, N. Sensory-updated residual life distributions for components with exponential degradation patterns. IEEE Trans. Autom. Sci. Eng. 2006, 3, 382–393. [Google Scholar] [CrossRef]
- Gebraeel, N.Z.; Lawley, M.A.; Li, R.; Ryan, J.K. Residual-life distributions from component degradation signals: A Bayesian approach. IIE Trans. 2005, 37, 543–557. [Google Scholar] [CrossRef]
- Pham, H.T.; Yang, B.S. Estimation and forecasting of machine health condition using ARMA/GARCH model. Mech. Syst. Sig. Process. 2010, 24, 546–558. [Google Scholar]
- Huang, G.; Li, H.; Ou, J.; Zhang, Y.; Zhang, M. A Reliable Prognosis Approach for Degradation Evaluation of Rolling Bearing Using MCLSTM. Sensors 2020, 20, 1864. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Santecchia, E.; Hamouda, A.; Musharavati, F.; Zalnezhad, E.; Cabibbo, M.; El Mehtedi, M.; Spigarelli, S. A review on fatigue life prediction methods for metals. Adv. Mater. Sci. Eng. 2016, 2016, 9573524. [Google Scholar] [CrossRef] [Green Version]
- Qian, Y.; Yan, R.; Gao, R.X. A multi-time scale approach to remaining useful life prediction in rolling bearing. Mech. Syst. Sig. Process. 2017, 83, 549–567. [Google Scholar] [CrossRef] [Green Version]
- Branch, R.A. Derailment at Grayrigg, Cumbria 23 February 2007. Available online: https://www.gov.uk/raib-reports/derailment-at-grayrigg (accessed on 10 December 2014).
- Eker, O.F.; Camci, F. State-Based Prognostics with State Duration Information. Qual. Reliab. Eng. Int. 2013, 29, 465–476. [Google Scholar] [CrossRef]
- Eker, Ö.F.; Camci, F.; Guclu, A.; Yilboga, H.; Sevkli, M.; Baskan, S. A simple state-based prognostic model for railway turnout systems. IEEE Trans. Ind. Electron. 2011, 58, 1718–1726. [Google Scholar] [CrossRef] [Green Version]
- Guclu, A.; Yilboga, H.; Eker, Ö.F.; Camci, F.; Jennions, I.K. Prognostics with autoregressive moving average for railway turnouts. In Proceedings of the Annual Conference of the PHM Society 2010, Portland, OR, USA, 10–16 October 2010. [Google Scholar]
- Yilboga, H.; Eker, Ö.F.; Güçlü, A.; Camci, F. Failure prediction on railway turnouts using time delay neural networks. In Proceedings of the 2010 IEEE International Conference on Computational Intelligence for Measurement Systems and Applications, Taranto, Italy, 6–8 September 2010; pp. 134–137. [Google Scholar]
- Camci, F.; Chinnam, R.B. Health-state estimation and prognostics in machining processes. IEEE Trans. Autom. Sci. Eng. 2010, 7, 581–597. [Google Scholar] [CrossRef] [Green Version]
- Oppenheimer, C.H.; Loparo, K.A. Physically based diagnosis and prognosis of cracked rotor shafts. Compon. Syst. Diagn. Progn. Health Manag. II 2002, 4733, 122–132. [Google Scholar]
- Moubray, J. Reliability-Centered Maintenance; Industrial Press Inc.: South Norwalk, CT, USA, 2001. [Google Scholar]
- Cope, D.; Ellis, J. Volume 5: Switch and Crossing Maintenance. In British Railway Track, 7th ed.; Perm. Way Inst.: Derby, UK, 2002. [Google Scholar]
- Asada, T.; Roberts, C.; Koseki, T. An algorithm for improved performance of railway condition monitoring equipment: Alternating-current point machine case study. Transp. Res. Part C Emerg. Technol. 2013, 30, 81–92. [Google Scholar]
- Asada, T. Novel Condition Monitoring Techniques Applied to Improve the Dependability of Railway Point Machines. Ph.D. Thesis, University of Birmingham, Birmingham, UK, 2013. [Google Scholar]








© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Q.; Nicholson, G.; Ye, J.; Zhao, Y.; Roberts, C. Estimating Residual Life Distributions of Complex Operational Systems Using a Remaining Maintenance Free Operating Period (RMFOP)-Based Methodology. Sensors 2020, 20, 5504. https://doi.org/10.3390/s20195504
Chen Q, Nicholson G, Ye J, Zhao Y, Roberts C. Estimating Residual Life Distributions of Complex Operational Systems Using a Remaining Maintenance Free Operating Period (RMFOP)-Based Methodology. Sensors. 2020; 20(19):5504. https://doi.org/10.3390/s20195504
Chicago/Turabian StyleChen, Qianyu, Gemma Nicholson, Jiaqi Ye, Yihong Zhao, and Clive Roberts. 2020. "Estimating Residual Life Distributions of Complex Operational Systems Using a Remaining Maintenance Free Operating Period (RMFOP)-Based Methodology" Sensors 20, no. 19: 5504. https://doi.org/10.3390/s20195504