
Abstract
The controlled dynamics of the rotor of an axial pump arranged in conical active magnetic bearings is studied. Bearings of this type make it possible to miniaturize the geometry of the rotor suspension structure, which is an important factor when designing ann auxiliary mechanical blood circulation apparatus. In such facilities, the problem of rotor positioning plays an important role. The essence of this work is in selecting the control coefficients of proportional-integral-differential control to stabilize the rotor.
Similar content being viewed by others

INTRODUCTION
Artificial blood-circulation apparatuses of various types are the main alternative to cardiac transplantation. Such an apparatus has existed since the 1960s [1–6]. Over 70 years, the apparatus design underwent significant changes: from membrane-type artificial heart ventricles to axial pumps [7]. Studies have revealed that the best results were demonstrated by the axial-type devices with a rotor in the blood stream [8]. Such facilities have a lot of advantages, but there are disadvantages, relating as to the device: rapid wear, unreliability, the need for frequent maintenance that affects the patient’s health, and some design features, which lead to immediate risks to the patient’s health such as thrombosis, reduction of hemolysis, etc. [9–11].
A new line of development of axial pumps has appeared in which the rotor is supported by active magnetic bearings providing for its contactless suspension. It prolongs the durability of such an apparatus and makes it possible to control the rotor and regulate its position [12].
The full suspension of the rotor on magnetic bearings can be implemented using two radial bearings and one axial bearing or two conical bearings. The structure, consisting of the rotor located on conical active magnetic bearings, has smaller dimensions, which is a clear advantage when designing artificial blood-circulation pumps, as it makes it possible to carry out the operations on installation of them for smaller patients such as children.
The problem of rotor positioning in the conical active magnetic bearings (AMBs) with an accuracy of 0.2 mm at different rotor rotation frequencies from 5000 to 12 000 rpm is considered. The problem of control is solved by using the proportional-integral-differential (PID) control taking into account the influence of hydrodynamic moments, which affect the rotor from the side of blood flow, as well as the external influences on the person.
WORK OBJECTIVE
The problem of stabilizing the rotor pump of an artificial blood-circulation apparatus is considered in this work. The rotor positioning error should not exceed the amount of constructive clearance of 0.2 mm. A mathematical model of the rotor in conical AMBs with PID-control is developed. The dynamics of the rotor and the response of the control system in the working range of angular speeds from 5000 to 12 000 rpm are studied.
DESIGN PROCEDURE
A symmetrical homogeneous rigid rotor with mass m rotates around the longitudinal axis with a constant angular speed Ω in two conical active magnetic bearings AMB1 and AMB2. The diagram is shown in Fig. 1.

Design diagram of the rotor in conical AMBs.
The position of the center of rotor mass is described by the vector of generalized coordinates \({\mathbf{q}} = {{\left\{ {\beta ,{{x}_{S}},\alpha ,{{y}_{S}},{{z}_{S}}} \right\}}^{T}}\), where α, β are the angles of counter-clockwise rotation around axes x and y, respectively, and xS, yS, zS are the coordinates of the center of rotor mass.
MATHEMATICAL ROTOR MODEL
The equation of motion in matrix form is
where M is the symmetrical positive-defined matrix of inertia; G is the skew-symmetric matrix of gyroscopic moments (2); F is the vector of generalized responses of suspension; Fe is the vector of generalized external influences.
CONICAL ACTIVE MAGNETIC BEARINGS
The generalized electromagnetic responses of suspension F are created by the controlling magnetic forces of the bearings [13].
which are applied to the rotor at the control points AMB1 (A) and AMB2 (B). Vectors F and FAMB are related by relations
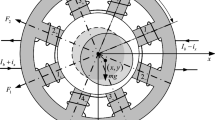
where Bq is the transformation matrix establishing a relation between the generalized coordinates of the center of mass \({\mathbf{q}} = {{[\beta ,{{x}_{S}},\alpha ,{{y}_{S}},{{z}_{S}}]}^{T}}\) and the displacements of the rotor inside the magnetic bearings \({{{\mathbf{q}}}_{{\mathbf{b}}}} = {{\left[ {{{x}_{{bA}}},{{y}_{{bA}}},{{x}_{{bB}}},{{y}_{{bB}}},{{z}_{b}}} \right]}^{T}}\), where \(\zeta \) is the vector of cosines and γ is the cone angle of the conical bearing. The geometry of the conical bearing is represented in Fig. 2.

Conical AMB: (a) geometry; (b) force diagram.
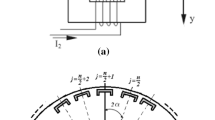
The windings of the electromagnets are supplied by direct bias currents i0, with which the currents \({\mathbf{i}} = {{\{ {{i}_{{Ax}}},{{i}_{{Ay}}},{{i}_{{Bx}}},{{i}_{{By}}}\} }^{T}}\) controlling the radial displacement of the rotor and the current iz controlling the axial displacement are summed. The control currents \({\mathbf{i}} = {{\{ {{i}_{{Ax}}},{{i}_{{Ay}}},{{i}_{{Bx}}},{{i}_{{By}}}\} }^{T}}\) in the opposite electromagnets have opposite sign, and they are equal in value. Control currents iz have different signs in windings AMB1 and AMB2 (Fig. 3).

Conical AMB: current diagram.
The tractive force F of the electromagnet is directed by the normal to the rotor surface and has radial \({{F}_{r}} = F\cos (\gamma )\) and axial \({{F}_{z}} = F\sin (\gamma )\) components.
The action line of resultant force F intersects the rotor longitudinal axis not at the center O of the bearing, but at point C, which is displaced from point O towards the cone basis by the distance Δz = \(\left( {\frac{{{{d}_{0}}}}{2} + \frac{{{{l}^{2}}}}{{6{{d}_{0}}{{{\cos }}^{2}}(\gamma )}}} \right)\tan (\gamma )\).
The expressions for the forces in bearings by axes x and y are of the form
Here i0 is the bias current; \({{i}_{{Ax}}}\), \({{i}_{{Ay}}}\), \({{i}_{{Bx}}}\), \({{i}_{{By}}}\) are the control currents applied to the bearings by axes x and y; δ is the bearing clearance; and kA, kB are the design factors of the bearings.
The control axial force Fz depends on the sum of currents in the electromagnets of each of the bearings, that is, on current iz, and does not depend on currents \({{i}_{{Ax}}}\), \({{i}_{{Ay}}}\), \({{i}_{{Bx}}}\), \({{i}_{{By}}}\). The expression for the axial force is of the form
where \({{c}_{z}} = \frac{{2L{{{\sin }}^{2}}(\gamma )}}{{{{\delta }^{2}}}}\sum\nolimits_{k = 1}^4 {i_{{k0}}^{2}} \) is the control coefficient and L is the bearing inductance.
The equation of motion is written in the coordinates of the center of mass q. The relation between vectors q and qb is of the form
Combining the equations of the rotor model (1), expressions (3), and the forces in the bearings and substituting expression (5), we obtain the following differential equation relative to coordinates q
CONSIDERING EXTERNAL INFLUENCES
The rotor takes up the load Fe in the form of external loads by axes x, y, and z, which are represented by harmonic functions, and the moment from the hydrodynamic force acting in the liquid flow. Let us present the moment as a vector-column [14].
where μ is the viscosity of blood, \(\mu = (3{\kern 1pt} - {\kern 1pt} 4) \times {{10}^{{ - 3}}}\) Pa s with 37°C, C is the environmental resistance coefficient, C = 0.91–0.85, r is the rotor radius, l is the rotor length, and Ω is the rotor rotation frequency.
The influence of external actions on a person is taken into account in the form of vibrations represented by harmonic functions acting by axes x, y, and z
where ω is the frequency of external action, and A1, A2, A3 are the amplitudes of the vibrations of transport in the example of the passenger car. A1, A2, A3 ≈ 0.1–5 mm at the vibration frequency 1.5–4 Hz.
SYNTHESIS OF THE CONTROL FROM THE POINT OF VIEW OF THE REVERSE PROBLEM OF DYNAMICS: PID-REGULATOR
PID regulators are the most widespread type of regulators. It is easy to work, which in part explains its popularity. According to some sources, more than 90% of real industrial problems have been solved using PID-regulators [16].
The PID-regulator does not have the possibility of adaptive self-adjustment, so its parameters are set for the whole operating time. At the same time, in real systems, the control object changes its characteristics during operation and the characteristics of the environment can change over time, but PID-control is sufficiently resistant to such changes in parameters. Deviation of the regulator from the optimal operation mode is possible, but the advanced criteria for operation quality of the system are satisfied.
In this work, the PID-control is implemented for each bearing assembly that provides decentralized control and makes it possible to achieve sufficient accuracy of rotor positioning. With this type of control, the data from the bearings and from the sensors are transmitted by different channels. Autonomous control is provided by every signal from the sensor with the control responding to it under the bearing, using the gain coefficients. Four output signals are combined in one output vector q
Matrices P, D, I contain estimated values of the gain coefficients, which are determined by the rotor mass and by the control coefficients.
For PID-control, the rotor center displacements in bearings and the currents were compared for different speeds (Figs. 4, 5).

Displacements of the centers of cross sections A and B of the rotor at rotation frequencies 5000, 10 000, and 12 000 rpm.

Rotor center displacements in the axial direction when varying the rotation frequencies.
The results obtained are summarized in Table 3. It can be concluded from the table that the PID-control makes it possible to stabilize the rotor position under different types of actions. All values are within a specified permissible value of clearance.
The synthesis of control for conical bearings differs from the synthesis of control for radial bearings in that, in radial bearings, the control is carried out merely by radial currents and, in the conical bearings, an opportunity to control the current in the axial direction appears.
Figure 6 presents the results of the synthesis of axial control currents during variation of the rotation frequencies. It is evident that the changes in the current correspond to changes in the external axial force acting on the bearing, which makes it possible to hold the rotor in the axial direction and ensure the complete stabilization of suspension. The values of control currents are within permissible values [17]. The amplitude values of currents were within 0.06–0.2 mA, respectively.

Dependences of currents in the axial direction on the external harmonic load.
CONCLUSIONS
A mathematical model of a rigid rotor in a flow of blood and suspended on conical active magnetic bearings was developed. The dynamics was simulated, and the experimental results are presented. Special emphasis in this work is placed on the problem of control by positioning and of rotor stabilization taking into account the features of the conical bearings. According to the conditions specified, the positioning error should not exceed 0.2 mm. The stabilization problem was solved for a rotor speed range from 5000 to 12 000 rpm.
The control coefficients were selected from the point of view of the reverse problem of dynamics. Variants with different bearing rigidities were simulated to ensure the complete suspension of the rotor.
The values of axial control currents ranged from 0.06 to 5 mA, depending on the positional rigidity of the bearings.
REFERENCES
Fox, C.S. et al., Total artificial hearts-past, current, and future, J. Card. Surg., 2015, vol. 30, no. 11, p. 856.
Birks, E.J.J., Left ventricular assist devices, Heart, 2010, vol. 96, no. 1, p. 63.
Timms, D., A review of clinical ventricular assist devices, Med. Eng. Phys. Inst. Phys. Eng. Med., 2011, vol. 33, no. 9, p. 1041.
Secretariat, M.A., Left ventricular assist devices, Health Technol. Assess. (Rockv), 2004, vol. 4, no. 3, p. 2542.
Fynn-Thompson, F. and Almond, C., Pediatric ventricular assist devices, Pediatr. Cardiol., 2007, vol. 28, no. 2, p. 149.
Stiller, B., Adachi, I., and Fraser, C.D., Pediatric ventricular assist devices, Pediatr. Crit. Care Med., 2013, vol. 14, no. 5, Suppl. 1, p. 20.
Itkin, G.P., Mechanical circulatory support: problems, solutions and new directions, Russ. J. Transplantol. Artif. Organs, 2014, vol. 16, no. 3, p. 76.
Bogdanova, Y. and Guskov, A., Synergetic synthesis of control laws for left ventricular assist device rotor on magnetic suspension, in Stability and Oscillations of Nonlinear Control Systems, Proceedings of the Pyatnitskiy’s International Conference,2016, p. 1.
Agarwal, S. and High, K.M., Newer-generation ventricular assist devices, Best Pract. Res. Clin. Anaesthesiol., 2012, vol. 26, no. 2, p. 117.
Rüschen, D. et al., Minimizing left ventricular stroke work with iterative learning flow profile control of rotary blood pumps, Biomed. Signal Process. Control., 2017, vol. 31, p. 444.
Lim, H.S., Howell, N., and Ranasinghe, A., The physiology of continuous-flow left ventricular assist devices, J. Card. Fail., 2017, vol. 23, no. 2, p. 169.
Bogdanova, Yu.V. and Gus’kov, A.M., Rotor control of an artificial ventricle of the heart with magnetic bearings: synergistic law and PID controller, in Sb. Trudov XXVIII Mezhdunarodnoi innovatsionno-orientirovannoi konferentsii molodykh uchenykh i studentov “MIKMUS-2015" (Proceedings of the 28th International Innovative Conference of Young Scientists and Students MIKMUS-2015), 2015, p. 270.
Schweitzer, G. and Maslen, E.H., Magnetic Bearings: Theory, Design and Application to Rotating Machinery, Berlin, Heidelberg: Springer, 2009.
Ovsyannikova, E.E. and Gouskov, A.M., Stabilizing vibration of the active magnetic bearings rotor for artificial ventricle assist device in the blood stream with linear-quadratic optimization, Sci. Educ. Bauman MSTU, 2016, vol. 16, no. 9, p. 45.
Frolov, K.V., Zashchita ot vibratsii i udarov (Vibration and Shock Protection), Moscow: Mashinostroenie, 1981.
Besekerskin, V.A. and Popov, E.P., Teoriya sistem avtomaticheskogo regulirovaniya (Theory of Automatic Control Systems), Moscow: Nauka, 1975.
GOST (State Standard) No. 12.1.038-82, Occupational safety standards system. Electrical safety. Maximum permissible values of touch voltages and currents (with the correction No. 1), 201AD, p. 6.
Funding
This work was carried out with the support of the Russian Foundation for Basic Research, project no. 15-29-01085 ofi_m.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
The authors declare that they have no conflict of interest.
About this article

Cite this article
Ovsyannikova, E.E., Gus’kov, A.M. Stabilization of a Rigid Rotor in Conical Magnetic Bearings. J. Mach. Manuf. Reliab. 49, 8–15 (2020). https://doi.org/10.3103/S1052618820010100
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.3103/S1052618820010100