
Abstract
Harvesting ultra-low frequency random vibration, such as human motion or turbine tower oscillations, has always been a challenge, but could enable many potential self-powered sensing applications. In this paper, a methodology to effectively harness this type of energy is proposed using rotary-translational motion and bi-stability. A sphere rolling magnet is designed to oscillate in a tube with two tethering magnets underneath the rolling path, providing two stable positions for the oscillating magnet. The generated magnetic restoring forces are of periodic form with regard to the sphere magnet location, providing unique nonlinear dynamics and allowing the harvester to operate effectively at ultra-low frequencies (< 1 Hz). Two sets of coils are mounted above the rolling path, and the change of magnetic flux within the coils accomplishes the energy conversion. A theoretical model, including the magnetic forces, the electromagnetic conversion and the occurring bi-stability, is established to understand the electromechanical dynamics and guide the harvester design. End linear springs are designed to maintain the periodic double-well oscillation when the excitation magnitude is high. Parametric studies considering different design factors and operation conditions are conducted to analyze the nonlinear electromechanical dynamics. The harvester illustrates its capabilities in effectively harnessing ultra-low frequency motions over a wide range of low excitation magnitudes.
Similar content being viewed by others


1 Introduction
Condition-based monitoring is widely employed for predicting potential system failures and reducing maintenance costs in mechanical structures and critical infrastructure [1,2,3]. Wireless sensors are one of the key enablers to condition-based monitoring, but they generally require regular battery recharging or replacement, introducing human intervention and maintenance costs. Converting the available passive energy sources in the location where sensors are mounted into electricity provides a self-contained power supply solution [4, 5], but it faces challenges in meeting the energy demands of sensing functions in many cases [5, 6]. This is especially difficult when energy sources have low-frequency content and random bursts. Different mechanisms have been adopted in the literature to harness low-frequency and random motions, adopting the potential benefits of nonlinear dynamics [7,8,9].
Frequency up-conversion is a well-established method to convert low-frequency random excitation from the environment into harvesters’ resonance by direct impacts [10, 11] or magnetic forces [12, 13]. Pillatsch et al. developed a piezoelectric frequency up-converting energy harvester with a rotating proof mass to harness human motion [14]. At frequencies around 2 Hz, this device produced a peak power output of 43 \(\upmu \hbox {W}\). Similarly, Liu et al. developed an electromagnetic energy harvester using frequency up-conversion and a rotating disc with an attached magnet [15]. At 8 Hz, the harvester generated the maximum power of 10.4 mW at a load resistance of 100 \(\Upomega \). Kuang et al. developed a piezoelectric knee-joint energy harvester using frequency up-conversion [16]. The harvester produced an average output power of 5.8 mW at 0.9 Hz with 8 piezoelectric bimorphs and 32 permanent magnets. Inspired by the parasitic relationship in plants, Fu et al. developed a host-parasite harvester to scavenge random low-frequency vibrations using frequency up-conversion by direct impact [17]. The harvester exhibited a broad operation bandwidth at around 18 Hz. Fang et al. were inspired by music boxes and developed a plucking energy harvester to harness rotational energy with multiple piezoelectric beams [18]. The harvester operates effectively over a wide frequency range from 14 to 35 Hz.
Nonlinear dynamics have been employed to harness low-frequency broadband motions. Most of the designs in the literature use fixed-fixed beams or cantilevers with magnets or pre-loads to create monostable or bi-stable oscillators [19,20,21]. Recently, Jia provided a comprehensive review on nonlinear vibration energy harvesting discussing the advantages and disadvantages of different nonlinear mechanisms and application-specific suggestions [22]. Yan et al. developed an electromechanical distributed-parameter model for a monostable energy harvester with variable stiffness [23]. Multi-hardening and multi-softening dynamics were studied, showing their effectiveness in enhancing the energy harvesting performance. Multi-stable energy harvesters are becoming a popular trend in broadband energy harvesting with various publications in the literature [24,25,26]. Zhou and Zuo studied the nonlinear dynamics of an asymmetric tristable energy harvester under different excitation conditions using the harmonic balance method [27]. The results showed that the potential barrier is a key factor to determine high-energy double-well oscillations. Mei et al. investigated the performance of a tristable piezoelectric energy harvester in rotational motion applications [28]. The perturbation method is used to describe the dynamics close to equilibria. Experimental results illustrated that the harvester operated efficiently over a wide rotational speed range (240-440 rpm).
In addition to beam-based design, harvesters using sliding or rolling magnets provide new possibilities in low-frequency energy harvesting [29,30,31,32,33]. Rocha et al. studied the dynamics of a non-ideal magnetic levitation system with a sliding magnet moving vertically in a tube [34]. Alevras et al. presented a nonlinear vibration energy harvester for rotating systems [35]. An electromagnetic harvester is attached to a spinning shaft at constant speeds. Magnetic levitation was used as the system nonlinear restoring force for broadening the resonant range of the oscillator. Wu et al. developed a piezoelectric spring pendulum oscillator that harnesses low-frequency (\(\sim 2\) Hz) and multi-directional vibrations [36]. A stretchable swing arm attached with piezoelectric elements was designed to provide nonlinear dynamics. Fan et al. presented a bi-directional hybrid energy harvester for low-frequency vibrations (\(>2\) Hz) [37]. A sliding cylindrical magnet was placed in a tube to acquire motions from the environment and provide the excitation for piezoelectric and electromagnetic conversion. Moss et al. proposed a monostable rotary-translational vibration energy harvesting approach for scavenging energy at frequencies below 10 Hz [32]. A peak power of 201 mW was produced from a host vibration of 0.5g RMS at 5.4 Hz. Geisler et al. developed a human motion energy harvester with a magnetic ball circulating inside a closed-loop guide and converting the kinetic energy of the user’s limbs into electricity during running [38]. From a 2 g moving ball, a 5-cm-diameter 21 \(\hbox {cm}^3\) prototype generated up to 4.8 mW of average power when worn by someone running at 8 km/h.
Although various solutions have been discussed in the literature regarding low-frequency energy harvesting, most devices operate effectively above 1 Hz. Developing effective solutions to harness ultra-low frequency motions (\(<1\) Hz) still remains an open question. Motions in this frequency range are commonly available to be harnessed in many applications, such as human motion or wind turbine tower motions, where self-powered sensing are highly demanded. In this paper, a novel ultra-low frequency energy harvester working effectively below 1 Hz is proposed for the first time by adopting bi-stability and rotary-translational motion. A theoretical model and a comprehensive numerical study are presented in the following sections to demonstrate the electromechanical dynamics and the capability of such a system in harnessing ultra-low frequency (\(<1\) Hz) motions over a wide range of excitation conditions.
2 Harvester design and theoretical modeling
2.1 Harvester operational principle
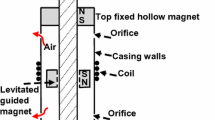
A sphere magnet is placed in a tube (harvester casing), and the magnet rolls along the tube length, as shown in Fig. 1. Two tethering magnets are fixed underneath the rolling path. The attractive magnetic forces between the tethering magnets and the rolling magnet generate two stable equilibria for the rolling sphere magnet oscillations. As the rolling magnet vibrates in the tube with amplitude larger than the distance between the two tethering magnets, bi-stable oscillations can be obtained in the rolling magnet. Two sets of coils are mounted above the rolling path at the same locations as the tethering magnets along the tube length. The change of magnetic flux within the coils when the rolling magnet crosses the stable positions generates electromotive force in the coils. It is worth mentioning that the coils are mounted on the top of the tube rather than the bottom because of the larger linear velocity (resulting in larger magnetic flux change) on the top of the rolling magnet [32].

Schematic of the ultra-low frequency vibration energy harvesting using rotary-translational motion of a magnet and system bi-stability
The orientation of tethering magnets and their gap is illustrated in Fig. 1. In order to create the two stable equilibria, the magnetization directions of the tethering magnets are reversed to provide the required attractive forces for the rolling magnet, as shown in Fig. 1. The magnetization direction of the right tethering magnet is upward, and an attractive force is applied on the rolling magnet. As the latter moves towards the left tethering magnet, its magnetization direction reverses at distance equal 1/2 sphere perimeter (\(\pi r_\mathrm{m}\), where \(r_\mathrm{m}\) is the radius of the rolling magnet), providing an attractive force. This gap (\(\pi r_\mathrm{m}\)) is also critical to avoid unpredictable sliding motion of the rolling magnet.
2.2 Electromechanical modeling
In order to study the electromechanical dynamics, a theoretical model is established. The equation of motion of the rolling magnet can be expressed as
where \(I_c=2/5mr_\mathrm{m}^2\) is the moment of inertia of the rolling magnet about its central axis, m and \(r_\mathrm{m}\) are the mass and radius, \(\theta \) is the angular displacement, \(c_m\) is the mechanical damping, \(F_\mathrm{mag}^i\) is the magnetic force in the horizontal direction provided by the tethering magnets, \(\hat{\Theta }\) is the electromagnetic coupling factor, I is the current in the coils, \(\omega \) is the excitation frequency and a is the excitation amplitude.
The electromagnetic conversion is equivalent to a voltage source in series with an internal resistive load. Using the Kirchhoff’s Voltage Law, the governing equation of the coils with a resistive load can be expressed as
where L is the coil inductance, \(R_\mathrm{c}\) and \(R_\mathrm{l}\) are the internal and load resistance, respectively, and \(v_m = \dot{\theta }r_\mathrm{m}\) is the translational velocity of the rolling magnet.
The magnetic force between the tethering and rolling magnets can be calculated using the simplified magnetic dipole model [39]
where \(\mu _0\) is the magnetic constant, \(\mathbf {r}_i\) is the distance between the (left, \(r_1\) or right, \(r_2\)) tethering magnet and the rolling magnet, \(\mathbf {m}_r\) and \(\mathbf {m}_t\) are the dipole moments for the rolling and tethering magnets. According to Fig. 1, these variables can be expressed as
where \(h_\mathrm{rt}\) is the gap between the rolling and tethering magnets, \(r_\mathrm{t}\) and \(t_\mathrm{th}\) are the radius and thickness of the tethering magnet, \(B_\mathrm{r}\) is the residual flux density.
According to the Faraday’s law of induction, the electromotive force (emf, \(\epsilon = \hat{\Theta }v_m\)) induced in the coils is equal to the rate of change of the magnetic flux passing through the coil, namely
The electromagnetic coupling factor \(\hat{\Theta }\) represents the rate of change of magnetic flux through the coils with respect to the translational displacement of the rolling magnet. The magnetic flux passing through the coils can be calculated by [32]
where N is the number of coil turns, \(a_1\) and \(a_2\) are the inner and outer radii of the coils, \(h_\mathrm{rc}\) is the gap between the coils and rolling magnet vertically and \(\bar{B}_Z(x,y,z_0)\) is the vertical magnetic field component at the mid-plane of the coil \(z=z_0\) at the travelling distance \(s=\theta r_\mathrm{m}\). This component can be expressed as
3 Parametric study
3.1 Tethering magnetic force
In order to study the system dynamics, a set of system parameters is chosen, as listed in Table 1. The theoretical model is solved numerically in Mathematica using Eq. (1)–(7). The magnetic forces applied on the rolling magnet are illustrated in Fig. 2. The force components in the x-axis direction (motion direction of the rolling magnet) due to the two tethering magnets are presented. The sum of these forces is also depicted by the red curve in Fig. 2a, which resembles a periodic function with wavelength of \(\pi r_\mathrm{m}\). These magnetic forces form the stiffness reaction term in Eq. (1). Compared to a typical bistable duffing oscillator (e.g., a piezomagnetoelastic energy harvester [40]) which has a nonlinear cubic stiffness \(k_3x^3\) term, the periodic stiffness creates unique exploitable dynamics.
A typical force profile (\(k_1x+k_3x^3\)) of the Duffing oscillator is plotted in Fig. 2a (red dash line) in comparison with the force generated in the studied harvester between the rolling and tethering magnets (red line). It is worth noting that equilibria are obtained at the locations where the restoring force is equal to zero (\(F_{m} = 0\)). Significant differences can be identified between these two types of oscillators. In the case of Duffing oscillator:
-
The magnitude of the restoring force curve increases monotonically when the displacement is larger than the stable positions.
-
The motion range of such oscillators is significantly limited by the increased restoring force. The oscillator’s kinetic energy is swiftly converted to potential energy when the displacement is larger than the stable positions.
However, for the oscillator with the periodic restoring force:,
-
The restoring force remains periodic within the range of consideration even when the displacement is larger than the stable positions (\(\pm \pi r_\mathrm{m}/2\)).
-
The motion range is not confined by the magnetic restoring force (tethering force) when the excitation is large enough. The significant decrease in the magnetic force allows the rolling magnet to escape the rolling path ends (restriction of tethering magnet) when the displacement is larger than \(\pi r_\mathrm{m}/2\) and the excitation magnitude is high.
-
Additional constraints (mechanical stoppers, as illustrated in Fig. 1) are necessary to confine the rolling magnet motion.

Magnetic forces generated on the rolling magnet with respect to its travel range: a comparison of the magnetic forces against a typical hardening spring restoring force of a Duffing oscillator and b magnetic force variation for different vertical gaps (\(h_\mathrm{rt}\)) between the tethering and rolling magnets. (Color figure online)
Figure 2b illustrates the effect on the tethering force due to different gaps (\(h_\mathrm{rt}\)) between the tethering magnets and the rolling magnet in the vertical direction. The restoring force increases when the gap is reduced. Therefore, by adjusting the vertical gap (\(h_\mathrm{rt}\)), the equivalent restoring stiffness can be set to an appropriate range for double-well oscillation. The bi-stability characteristic of this system can be better illustrated by the potential energy against the rolling magnet travel distance. The potential energy can be calculated using
where x is the location where the magnetic potential energy is calculated and n is the number of the tethering magnets.
Figure 3 shows the magnetic potential energy generated by the tethering forces. Two stable positions (equilibria) and three unstable positions are clearly illustrated. There are two unique features that can be identified in the potential energy curve: (1) the potential barrier changes as a function of the gap \(h_\mathrm{rt}\) between the magnets and (2) the ability of the system to operate in the double-well manner as a bi-stable oscillator varies due to the presence of three unstable positions. By increasing the gap, the potential barrier depth reduces, which means the system is easier to operate in the double-well mode for low excitation. However, the reduced potential depth also means the kinetic energy captured from the environment is decreased, which is not ideal for increasing the power output.

Potential energy function plots for varying gap size \(h_\mathrm{rt}\) between the rolling and tethering magnets
The difference in potential barrier depths would create difficulties for the system to follow the double-well oscillations when the excitation is too intense. For example, when \(h_\mathrm{rt} = 24\) mm, Barrier \(\#1\) is higher than Barrier \(\#2\), which means that when the kinetic energy of the rolling magnet is sufficient to conquer Barrier \(\#1\), it is also enough to cross Barrier \(\#2\). Eventually, the rolling magnet runs into the uncontrolled region (blue area) and requires additional constraints to maintain the double-well oscillations. Therefore, a trade-off between bi-stable operation and enhanced output power has to be made by selecting an appropriate gap size.

Harvester electromagnetic characteristics. a Magnetic flux \(\Phi _m\); b electromagnetic coupling factor \(d\Phi _m/ds\) with respect to rolling magnet displacement for different gaps \(h_\mathrm{rc}\) between the coils and the sphere magnet
3.2 Electromagnetic transduction
The magnetic flux and its rate of change as a function of the travel distance were calculated using Eq. (5)–(7) and are illustrated in Fig. 4. Two sets of coils are considered in the calculation using the configuration shown in Fig. 1. The magnetic flux \(\Phi _m\) and the electromagnetic coupling factor (\(d\Phi _m/ds\)) are illustrated for different gaps \(h_\mathrm{rc}\) between the coils and the sphere magnet. Larger coupling factors can be obtained with smaller gaps, which means a smaller gap is preferred in the design to enhance the electromechanical coupling factor. It is worth noticing that the magnetic flux does not obtain the maximum values at the coil locations, as shown in Fig. 4a. This is mainly due to the magnetic flux distribution of a sphere magnet. Two peaks are noted close to each stable position due to the flux distribution.
The electromagnetic coupling factor (\(\mathrm{d}\Phi _m/\mathrm{d}s\)) is illustrated in Fig. 4b. According to the distribution, 3.5 cycles of magnetic flux density variation can be realized when the sphere magnet travels from one end to the other (half motion cycle), which means the output voltage alternating frequency is 7 times of the motion frequency. Larger coupling factor is the result of the shape change of the magnetic flux. Also, the larger electromagnetic coupling factor is beneficial to enhance the conversion capability. The factor can be increased by the number of coil turns and the vertical gap \(h_\mathrm{rc}\) between the rolling magnet and the coils.

Electromechanical dynamics of the harvester under different operation conditions. a Single-well oscillation and the corresponding output voltage at 0.2 \(\hbox {m}/\hbox {s}^2\) excitation amplitude; b double-well oscillation and output voltage at 0.24 \(\hbox {m}/\hbox {s}^2\) excitation amplitude; c phase portraits for cases in a and b
3.3 Bi-stable dynamics
The bi-stable dynamics of the system are further investigated under different operating conditions. Figure 5 illustrates the sphere magnet displacement, coil output voltage and phase plots for different excitation conditions. At external excitation frequency 0.4 Hz, the harvester operates from a single-well oscillation at 0.2 \(\hbox {m/s}^2\) excitation amplitude in Fig. 5a to double-well at 0.24 \(\hbox {m/s}^2\) in Fig. 5b. The enhancement of the output voltage is clearly illustrated from the single-well to double-well transition. Better electromechanical conversion can be realized due to the double-well oscillation even in conditions where the excitation frequency is quite low. The output peak voltage is enhanced from 0.02 V peak to 0.1 V peak as a result.
The output voltage up-converting effect discussed in Fig. 4b is also presented in Fig. 5b. The rolling magnet is oscillating under 0.4 Hz excitation frequency in the double-well mode. However, the output voltage from the coils is alternating 7 times within one magnet oscillating cycle. This increased alternating frequency of the output voltage is achieved due to the alternating nature of the electromechanical coupling factor (\(\mathrm{d}\Phi _m/\mathrm{d}s\)), as shown in Fig. 4b.
The phase portraits for different operating conditions are illustrated in Fig. 5c. The advantage of operating in the double-well mode is well illustrated with larger magnitudes in both displacement and velocity. Decreasing the restoring force provided by the tethering magnets is one of the solutions to maintain the double-well mode when the excitation amplitude is low, but the maximum kinetic energy that can be stored in the oscillating magnet will be reduced.

Displacement constraints for the rolling magnet using limit springs. Additional restoring forces are provided by the springs when \(\mid x\mid > d_\mathrm{lim}\)
4 Nonlinear dynamics with displacement constraints
4.1 Displacement constraints modeling
Since the restoring forces provided by the tethering magnets are insufficient to hold the rolling magnet when its travel distance is large or when the excitation magnitude is high (in Fig. 2), additional constraints are necessary to limit the motion range of the rolling magnet. As illustrated in Fig. 1, end stoppers can be introduced for this purpose. However, hard impacts on side walls would introduce energy losses. Therefore, linear springs are introduced to provide additional restoring forces, as shown in Fig. 6. Thus, the overall restoring force on the rolling magnet can then be expressed as:
where x is the magnet travel distance, \(d_\mathrm{lim}\) is the position of the limit springs on each side and k is the spring constant.
The new restoring force is used to replace the restoring force term in Eq. (1). With the additional constraints, the electromechanical dynamics under higher excitation conditions can be investigated. The restoring force and the potential energy of the rolling magnet were calculated using Eq. (9), as shown in Fig. 7. When the travelling distance of the rolling magnet is larger than \(d_\mathrm{lim}\)(=0.04 m), a sharp increase on the restoring force is created by the springs. The additional restoring force has created sufficient potential barriers to confine the motion range of the rolling magnet.

Overall restoring force and potential energy with the consideration of the limit springs. The spring constant is set as 10 N/m and \(d_\mathrm{lim}\) = 0.04 m

Harvester double-well oscillation within or surpassing the position limits. a Double-well oscillation and the corresponding output voltage at 0.24 \(\hbox {m}/\hbox {s}^2\) excitation amplitude; b double-well oscillation and output voltage at 0.30 \(\hbox {m}/\hbox {s}^2\) excitation amplitude; c phase portraits for conditions in a and b
Figure 8 depicts the difference in dynamics when the motion is within the position limit (Fig. 8a) and larger than \(d_\mathrm{lim}\) (Fig. 8b) due to the different excitation amplitudes. As the acceleration magnitude increases from 0.24 to 0.30 \(\hbox {m}/\hbox {s}^2\), the rolling magnet hits the limit springs shown in Fig. 6. The double-well motion is maintained with significant velocity change close to \(d_\mathrm{lim}\), as shown in Fig. 8c. The additional restoring forces induced by the limit springs fulfill the function of confining the motion of the rolling magnet. The latter maintains the periodic double-well oscillations at higher excitation magnitudes.

Bifurcation diagrams showing the periodic dynamics against different bifurcation parameters, including a base excitation amplitude for \(h_\mathrm{tr}=0.0235\) m and b the gaps between the tethering and rolling magnets (for 0.2 \(\hbox {m}/\hbox {s}^2\) excitation amplitude)
4.2 Harvester nonlinear dynamics
Although the system exhibits periodic behavior, a parametric investigation is required to understand the system dynamics, identify the best configuration to harvest energy and even evaluate the capability of a particular design. Bifurcation diagrams are presented in Fig. 9a, b by varying the excitation amplitude and the tethering forces (gaps between the tethering and rolling magnets), respectively. Figure 9a illustrates the transition of the harvester motion from the periodic single-well mode to chaotic double-well and to periodic double-well mode with the increase in excitation level. The additional restoring force from the limit springs creates chaotic behaviors at the initial stage when the excitation magnitude increases from 0.26 to 0.29 \(\hbox {m}/\hbox {s}^2\). Afterwards, the system returns to periodic double-well oscillation again.
In terms of the influence of the restoring force, it decreases, when the gaps between the magnets increase. The harvester is easier to operate in the periodic double-well mode with lower restoring forces, but the impacts on the limit springs occur more easily, which generates complex chaotic behavior with the increase in the gaps, as shown in Fig. 9b. The system switches between periodic and chaotic oscillations frequently when \(h_\mathrm{rt}\) is larger than 0.0235 m.
In order to observe the dynamics in Fig. 9 with more details, the phase portraits and Poincar plots are generated for conditions a to j labeled in Fig. 9. The corresponding plots are illustrated in Fig. 10. In Fig. 10a–e, the effect of excitation amplitude is well demonstrated in terms of the altering oscillation magnitude among different oscillation modes. It is worth noticing that in Fig. 10b, impacts on the limit springs appear when the excitation amplitude is relatively low, and then the harvester oscillates in the periodic double-well mode without impacts when the excitation amplitude is increased to 0.24 \(\hbox {m}/\hbox {s}^2\) in Fig. 10c. This phenomenon is mainly due to the fact that when the harvester operates in chaos, the initial conditions affect the system dynamics dramatically. Impacts on the limit springs can occur even at low excitation levels, as shown in Fig. 10b. More results will be discussed in the next section regarding the influence of initial conditions on harvester’s performance. The harvester reaches another chaotic region with the increase in excitation amplitude, as shown in Fig. 10d due to the initiation of impacts on the limit springs, before oscillating periodically again in Fig. 10e.

Phase portrait and Poincar plot showing the details of vibration dynamics transition in Fig. 9. a–e Different excitation levels and f–j different gaps (restoring force)
Figure 10f–j depicts the influence on system dynamics of increasing the gaps between the tethering and rolling magnets. The harvester is easier to oscillate in the double-well mode, and the impacts have generated various regions of chaos as shown in Fig. 10f, h, i. The other effect is that the reduced restoring force also decreases the energy that can be transferred into the harvester from the base excitation. It can be observed that the maximum velocity of the system close to two stable positions is reducing when moving from Fig. 10g–j, which eventually affects the energy harvesting performance. Therefore, the trade-off between the double-well oscillations and the achievable maximum output power needs to be considered in the optimization process.
As shown in Fig. 10, two attractors are presented at around ± 0.016 m. In order to study the sensitivity of such systems to initial conditions and the existence of equilibria (attractors), the basins of attraction were plotted, as shown in Fig. 11, illustrating the coexistence of attractors. For initial conditions represented in blue, the system will be stable at Attractor 1, and for those in yellow, the system will be stabilized at Attractor 2. Fig. 11b shows the enlarged view of the red squared area in Fig. 11a. The system is quite sensitive in some areas where a marginal difference in the initial conditions will lead the system to a different attractor.
4.3 Harvester operation bandwidth and output
The operation bandwidth is another important characteristic for energy harvesters, since the ambient vibration energy is usually of broadband nature at low frequencies, e.g., wind turbine tower motions (usually below 1 Hz with several dominant frequency components). Figure 12 illustrates the double-well or single-well oscillation modes for different excitation frequency and amplitude conditions. The yellow color represents situations for the double-well oscillations, while the blue area represents confined single-well motions. With the increase in excitation magnitude, the harvester switches from single-well to double-well oscillations, and when above 0.25 \(\hbox {m}/\hbox {s}^2\), the system lies mostly in the double-well mode for the considered frequency range.

Basins of attraction for two different attractors and a variety of initial velocity and displacement conditions (\(\zeta _\mathrm{m}\) = 0.08 and excitation = 0.135 \(\hbox {m}/\hbox {s}^2\)). a Overall range and b detail of the red squared area depicted in Fig. 11a. (Color figure online)

Single- and double-well oscillations under different excitation frequency and amplitude conditions corresponding to gap \(h_\mathrm{rt}=0.0235\) m. Region (1) for single-well oscillations whereas Region (2) to double-well
However, the region of double-well oscillation does not increase monotonically with the increase in excitation frequency. This region reaches its maximum width between 0.6 and 0.7 Hz and exhibits a wide operation bandwidth from 0.38 to 0.83 Hz at 0.23 \(\hbox {m}/\hbox {s}^2\). Although the absolute bandwidth is only 0.45 Hz, the relative bandwidth corresponding to the central frequency is significantly large. Here, the relative operation bandwidth is defined as:
where \(f_u\) and \(f_l\) are the upper and lower frequency limits for the system to operate in the double-well mode, respectively. The relative bandwidth in this case, therefore, is 74.4% of the central frequency (0.605 Hz). It is also worth mentioning that in Fig. 12, there are mixed blue and yellow dots during the transition from single-well oscillations to double-well. These mixed dots represent the regions of chaotic behavior.

Rolling magnet displacement and RMS output power during frequency sweeps. a Displacement during forward sweep, b displacement during backward sweep and c RMS output power for both forward and backward sweeps
Figure 13 illustrates the electromechanical performance of the harvester during frequency-sweep. The excitation amplitude is 0.6 \(\hbox {m}/\hbox {s}^2\) and the gap \(h_\mathrm{rt} = 0.0235\) m. As shown in Fig. 13a, b, the harvester operates in the periodic double-well mode for a wide frequency range (below 0.8 Hz) and enters into the chaotic region at 0.9 Hz in the forward sweep and at 0.8 Hz in the backward sweep, similarly to the jump phenomenon in a typical hardening Duffing oscillator. Figure 13c depicts the root-mean-square (RMS) output power of the harvester for two frequency sweeps. The harvester exhibits a wide operation bandwidth with average output power of 60 \(\upmu \hbox {W}\) at 0.8 Hz. It can be noticed that although the harvester oscillates in the double-well mode at low frequencies (e.g., 0.3 Hz), the output power is relatively low. This is due to the fact that the electromagnetic conversion is significantly affected by the operation frequency of a system (\(P\propto \omega ^2\) [41]). Integrating other conversion mechanisms, such as piezoelectric, in the harvester can be potential solutions to further enhance the energy harvesting capability of this design.
5 Conclusions
In this work, an ultra-low frequency (< 1 Hz) energy harvester based on the rotary-translational motion of a magnet and bi-stability was proposed for the first time. A rolling sphere magnet is placed in a tube to oscillate in the horizontal direction. Two tethering magnets used to control the motion of the rolling magnet are placed underneath the rolling path of the sphere magnet with a gap of \(\pi r_\mathrm{m}\) between them where \(r_\mathrm{m}\) is the radius of the rolling magnet. The attractive magnetic forces applied on the sphere magnet by the tethering magnets create two stable equilibria.
A theoretical model was developed to describe the electromechanical dynamics. The magnetic force was described using the magnetic dipole model. The restoring force provided by the tethering magnets is in a periodic form, which is quite different from a typical bistable duffing oscillator (\(k_1x+k_3x^3\)) that is established by a moving magnet between two stationary ones. This unique stiffness allows the magnet to oscillate easier with large displacements (double-well), but also requires additional end constraints to confine the motion when the excitation magnitude is high. The magnetic flux and its rate of change were numerically studied.
In order to limit the motion range, linear springs were introduced to provided additional restoring forces when the rolling magnet is in contact with the end linear springs. Hard impacts with energy losses can also be considered using the energy loss model introduced in [42]. The introduced end linear springs can effectively maintain the periodic double-well motion when the excitation magnitude is high. The nonlinear electromagnetic dynamics of the harvester have been studied for different excitation amplitudes and restoring force levels using bifurcation diagrams and Poincar plots. The basins of attraction were also studied, showing the sensitivity of the system to initial conditions.
The operation bandwidth of the harvester was studied under different excitation frequencies and amplitudes, indicating the capability of the system to operate effectively at ultra-low frequencies (0.2–1 Hz) with low excitation amplitudes (e.g., 0.4 \(\hbox {m}/\hbox {s}^2\)). The operation bandwidth is further illustrated in a frequency sweep study. The harvester yields an RMS output power of 60 \(\upmu \hbox {W}\) at 0.8 Hz for 0.6 \(\hbox {m}/\hbox {s}^2\) excitation. The methodology proposed in this work provides a feasible solution to harness ultra-low frequency energy sources over a broad bandwidth.
References
Tahan, M., Tsoutsanis, E., Muhammad, M., Karim, Z.A.: Performance-based health monitoring, diagnostics and prognostics for condition-based maintenance of gas turbines: a review. Appl. Energy 198, 122–144 (2017)
Fu, H., Khodaei, Z.S., Aliabadi, M.F.: An event-triggered energy-efficient wireless structural health monitoring system for impact detection in composite airframes. IEEE Internet Things J. 6(1), 1183–1192 (2018)
Ji, Q., Ding, Z., Wang, N., Pan, M., Song, G.: A novel waveform optimization scheme for piezoelectric sensors wire-free charging in the tightly insulated environment. IEEE Internet Things J. 5(3), 1936–1946 (2018)
Mitcheson, P.D., Yeatman, E.M., Rao, G.K., Holmes, A.S., Green, T.C.: Energy harvesting from human and machine motion for wireless electronic devices. Proc. IEEE 96(9), 1457–1486 (2008)
Wang, J., Tang, L., Zhao, L., Zhang, Z.: Efficiency investigation on energy harvesting from airflows in hvac system based on galloping of isosceles triangle sectioned bluff bodies. Energy 172, 1066–1078 (2019)
Fang, S., Wang, S., Miao, G., Zhou, S., Yang, Z., Mei, X., Liao, W.H.: Comprehensive theoretical and experimental investigation of the rotational impact energy harvester with the centrifugal softening effect. In: Nonlinear Dynamics, pp. 1–30 (2020)
Li, H., Tian, C., Deng, Z.D.: Energy harvesting from low frequency applications using piezoelectric materials. Appl. Phys. Rev. 1(4), 041301 (2014)
Harne, R.L., Wang, K.: A review of the recent research on vibration energy harvesting via bistable systems. Smart Mater. Struct. 22(2), 023001 (2013)
Wang, J., Geng, L., Yang, K., Zhao, L., Wang, F., Yurchenko, D.: Dynamics of the double-beam piezo-magneto-elastic nonlinear wind energy harvester exhibiting galloping-based vibration. Nonlinear Dyn. (2020)
Liu, H., Lee, C., Kobayashi, T., Tay, C.J., Quan, C.: Piezoelectric mems-based wideband energy harvesting systems using a frequency-up-conversion cantilever stopper. Sens. Actuators, A 186, 242–248 (2012)
Dechant, E., Fedulov, F., Chashin, D.V., Fetisov, L.Y., Fetisov, Y.K., Shamonin, M.: Low-frequency, broadband vibration energy harvester using coupled oscillators and frequency up-conversion by mechanical stoppers. Smart Mater. Struct. 26(6), 065021 (2017)
Zorlu, Ö., Topal, E.T., Kulah, H.: A vibration-based electromagnetic energy harvester using mechanical frequency up-conversion method. IEEE Sens. J. 11(2), 481–488 (2010)
Fu, H., Yeatman, E.M.: A methodology for low-speed broadband rotational energy harvesting using piezoelectric transduction and frequency up-conversion. Energy 125, 152–161 (2017)
Pillatsch, P., Yeatman, E.M., Holmes, A.S.: A piezoelectric frequency up-converting energy harvester with rotating proof mass for human body applications. Sens. Actuators, A 206, 178–185 (2014)
Liu, H., Hou, C., Lin, J., Li, Y., Shi, Q., Chen, T., Sun, L., Lee, C.: A non-resonant rotational electromagnetic energy harvester for low-frequency and irregular human motion. Appl. Phys. Lett. 113(20), 203901 (2018)
Kuang, Y., Yang, Z., Zhu, M.: Design and characterisation of a piezoelectric knee-joint energy harvester with frequency up-conversion through magnetic plucking. Smart Mater. Struct. 25(8), 085029 (2016)
Fu, H., Sharif-Khodaei, Z., Aliabadi, F.: A bio-inspired host-parasite structure for broadband vibration energy harvesting from low-frequency random sources. Appl. Phys. Lett. 114(14), 143901 (2019)
Fang, S., Fu, X., Du, X., Liao, W.H.: A music-box-like extended rotational plucking energy harvester with multiple piezoelectric cantilevers. Appl. Phys. Lett. 114(23), 233902 (2019)
Fan, K., Tan, Q., Liu, H., Zhang, Y., Cai, M.: Improved energy harvesting from low-frequency small vibrations through a monostable piezoelectric energy harvester. Mech. Syst. Sig. Process. 117, 594–608 (2019)
Zhou, S., Cao, J., Lin, J.: Theoretical analysis and experimental verification for improving energy harvesting performance of nonlinear monostable energy harvesters. Nonlinear Dyn. 86(3), 1599–1611 (2016)
Li, H., Qin, W.: Dynamics and coherence resonance of a laminated piezoelectric beam for energy harvesting. Nonlinear Dyn. 81(4), 1751–1757 (2015)
Jia, Y.: Review of nonlinear vibration energy harvesting: Duffing, bistability, parametric, stochastic and others. J. Intell. Mater. Syst. Struct., 1045389X20905989 (2020)
Yan, Z., Sun, W., Hajj, M.R., Zhang, W., Tan, T.: Ultra-broadband piezoelectric energy harvesting via bistable multi-hardening and multi-softening. In: Nonlinear Dynamics, pp. 1–21 (2020)
Zhou, S., Cao, J., Inman, D.J., Lin, J., Liu, S., Wang, Z.: Broadband tristable energy harvester: modeling and experiment verification. Appl. Energy 133, 33–39 (2014)
Huang, D., Zhou, S., Litak, G.: Analytical analysis of the vibrational tristable energy harvester with a rl resonant circuit. Nonlinear Dyn. 97(1), 663–677 (2019)
Zhang, Y., Jin, Y., Xu, P., Xiao, S.: Stochastic bifurcations in a nonlinear tri-stable energy harvester under colored noise. Nonlinear Dyn. 99(2), 879–897 (2020)
Zhou, S., Zuo, L.: Nonlinear dynamic analysis of asymmetric tristable energy harvesters for enhanced energy harvesting. Commun. Nonlinear Sci. Numer. Simul. 61, 271–284 (2018)
Mei, X., Zhou, S., Yang, Z., Kaizuka, T., Nakano, K.: A tri-stable energy harvester in rotational motion: modeling, theoretical analyses and experiments. J. Sound Vib. 469, 115142 (2020)
Kuang, Y., Zhu, M.: Parametrically excited nonlinear magnetic rolling pendulum for broadband energy harvesting. Appl. Phys. Lett. 114(20), 203903 (2019)
Bowers, B.J., Arnold, D.P.: Spherical, rolling magnet generators for passive energy harvesting from human motion. J. Micromech. Microeng. 19(9), 094008 (2009)
Zhang, L., Dai, H., Yang, Y., Wang, L.: Design of high-efficiency electromagnetic energy harvester based on a rolling magnet. Energy Convers. Manag. 185, 202–210 (2019)
Moss, S.D., Hart, G.A., Burke, S.K., Carman, G.P.: Hybrid rotary-translational vibration energy harvester using cycloidal motion as a mechanical amplifier. Appl. Phys. Lett. 104(3), 033506 (2014)
Smilek, J., Hadas, Z., Vetiska, J., Beeby, S.: Rolling mass energy harvester for very low frequency of input vibrations. Mech. Syst. Sig. Process. 125, 215–228 (2019)
Rocha, R.T., Balthazar, J.M., Tusset, A.M., de Souza, S.L.T., Janzen, F.C., Arbex, H.C.: On a non-ideal magnetic levitation system: nonlinear dynamical behavior and energy harvesting analyses. Nonlinear Dyn. 95(4), 3423–3438 (2019)
Alevras, P., Theodossiades, S., Rahnejat, H.: On the dynamics of a nonlinear energy harvester with multiple resonant zones. Nonlinear Dyn. 92(3), 1271–1286 (2018)
Wu, Y., Qiu, J., Zhou, S., Ji, H., Chen, Y., Li, S.: A piezoelectric spring pendulum oscillator used for multi-directional and ultra-low frequency vibration energy harvesting. Appl. Energy 231, 600–614 (2018)
Fan, K., Liu, S., Liu, H., Zhu, Y., Wang, W., Zhang, D.: Scavenging energy from ultra-low frequency mechanical excitations through a bi-directional hybrid energy harvester. Appl. Energy 216, 8–20 (2018)
Geisler, M., Boisseau, S., Gasnier, P., Willemin, J., Gobbo, C., Despesse, G., Ait-Ali, I., Perraud, S.: Looped energy harvester for human motion. Smart Mater. Struct. 26(10), 105035 (2017)
Yung, K.W., Landecker, P.B., Villani, D.D.: An analytic solution for the force between two magnetic dipoles. Phys. Sep. Sci. Eng. 9(1), 39–52 (1998)
Erturk, A., Inman, D.J.: Broadband piezoelectric power generation on high-energy orbits of the bistable duffing oscillator with electromechanical coupling. J. Sound Vib. 330(10), 2339–2353 (2011)
Fu, H., Yeatman, E.M.: Comparison and scaling effects of rotational micro-generators using electromagnetic and piezoelectric transduction. Energy Technol. 6(11), 2220–2231 (2018)
Huang, T., McFarland, D.M., Vakakis, A.F., Gendelman, O.V., Bergman, L.A., Lu, H.: Energy transmission by impact in a system of two discrete oscillators. In: Nonlinear Dynamics, pp. 1–11 (2020)
Acknowledgements
Dr Fu would like to thank the financial support by the startup fund from Loughborough University for new academics.
Funding
Loughborough University
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Fu, H., Theodossiades, S., Gunn, B. et al. Ultra-low frequency energy harvesting using bi-stability and rotary-translational motion in a magnet-tethered oscillator. Nonlinear Dyn 101, 2131–2143 (2020). https://doi.org/10.1007/s11071-020-05889-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-020-05889-9