
Abstract
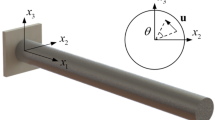
A new simple formulation of the orientation constraints for very flexible bodies is introduced in this investigation. This constraint formulation avoids using the tangent or cross-section frames previously used in the literature by directly using two position-gradient vectors to define the orientation constraint equations that eliminate the relative rotations between two bodies. The orientation constraints are commonly used to define clamped (rigid) joint between very flexible bodies, and rigid and less-flexible bodies. The very flexible bodies are modeled using the absolute nodal coordinate formulation (ANCF) which employs position gradients as nodal coordinates, while other rigid and less-flexible bodies have kinematics described in terms of orientation parameters. The less-flexible bodies can be modeled using the floating frame of reference formulation. Conventional clamped-end conditions eliminate all rigid body and deformation degrees of freedom because of the low-order of the finite element interpolation. When using a higher interpolation order, distinction is made between fully- and partially-clamped joints; the former eliminates all the degrees of freedom, while the latter eliminates only the relative translations and rotations, allowing for local deformations at the joint definition point. The singularity problem that arises, in the formulation of the orientation constraints, as the result of using ANCF orientation vectors derived using one position-gradient vector is demonstrated using simple, but common, example of a cantilever beam. The applicability of Saint–Venant principle, which states that the effect of the load diminishes away from the point of application of the load, to constraint forces that eliminate degrees of freedom is examined. Numerical results obtained in this study demonstrate that elimination of degrees of freedom, which leads to different kinematic structures and deformation basis-vectors, can be more significant in the case of soft materials.
























Similar content being viewed by others
References
Obrezkov, L.P., Matikainen, M.K., Harish, A.B.: A finite element for soft tissue deformation based on the absolute nodal coordinate formulation. Acta Mech. (2020). https://doi.org/10.1007/s00707-019-02607-4
Shabana, A.A., Zhang, D.: ANCF curvature continuity: application to soft and fluid materials. Nonlinear Dyn. 100, 1497–1517 (2020)
Fotland, G., Haskins, C., Rølvåg, T.: Trade study to select best alternative for cable and pulley simulation for cranes on offshore vessels. Syst. Eng. (2019). https://doi.org/10.1002/sys.21503
Chen, Y., Zhang, D.G., Li, L.: Dynamic analysis of rotating curved beams by using absolute nodal coordinate formulation based on radial point interpolation method. Sound Vib. 441, 63–83 (2019)
Ebel, H., Matikainen, M.K., Hurskainen, V.V., Mikkola, A.: Higher-order beam elements based on the absolute nodal coordinate formulation for three-dimensional elasticity. Nonlinear Dyn. 88, 1075–1091 (2017)
Yang, S., Deng, Z., Sun, J., Zhao, Y., Jiang, S.: An improved variable-length beam element with a torsion effect based on the absolute nodal coordinate formulation. IMechE J. Multibody Dyn. 232, 69–83 (2018)
Dmitrochenko, O.N., Pogorelov, D.Y.: Generalization of plate finite elements for absolute nodal coordinate formulation. Multibody Syst. Dyn. 10, 17–43 (2003)
Gerstmayr, J., Irschik, H.: On the correct representation of bending and axial deformation in the absolute nodal coordinate formulation with an elastic line approach. J. Sound Vib. 318(3), 461–487 (2008)
Hu, W., Tian, Q., Hu, H.Y.: Dynamics simulation of the liquid-filled flexible multibody system via the absolute nodal coordinate formulation and SPH method. Nonlinear Dyn. 75, 653–671 (2014)
Nachbagauer, K.: State of the art of ANCF elements regarding geometric description, interpolation strategies, definition of elastic forces, validation and locking phenomenon in comparison with proposed beam finite elements. Arch. Comput. Methods Eng. 21(3), 293–319 (2014)
Olshevskiy, A., Dmitrochenko, O., Kim, C.W.: Three-dimensional solid brick element using slopes in the absolute nodal coordinate formulation. ASME J. Comput. Nonlinear Dyn. 9(2), 1–10 (2014)
Orzechowski, G., Fraczek, J.: Nearly incompressible nonlinear material models in the large deformation analysis of beams using ANCF. Nonlinear Dyn. 82(1), 451–464 (2015)
Tian, Q., Chen, L.P., Zhang, Y.Q., Yang, J.Z.: An efficient hybrid method for multibody dynamics simulation based on absolute nodal coordinate formulation. ASME J. Comput. Nonlinear Dyn. 4, 021009-1–021009-14 (2009)
Tian, Q., Sun, Y.L., Liu, C., Hu, H.Y., Paulo, F.: Elasto-hydro-dynamic lubricated cylindrical joints for rigid-flexible multibody dynamics. Comput. Struct. 114–115, 106–120 (2013)
Shen, Z., Li, P., Liu, C., Hu, G.: A finite element beam model including cross-section distortion in the absolute nodal coordinate formulation. Nonlinear Dyn. 77(3), 1019–1033 (2014)
Shabana, A.A.: Computational Continuum Mechanics, 3rd edn. Cambridge University Press, Cambridge (2018)
Hussein, B.A., Weed, D., Shabana, A.A.: Clamped end conditions and cross section deformation in the finite element absolute nodal coordinate formulation. Multibody Syst. Dyn. 21(4), 375–393 (2009)
Gantoi, F.M., Brown, M.A., Shabana, A.A.: ANCF finite element/multibody system formulation of the ligament/bone insertion site constraints. ASME J. Comput. Nonlinear Dyn. 5(3), 031006-1–031006-9 (2010)
Goldstein, H.: Classical Mechanics. Addison-Wesley, Boston (1950)
Greenwood, D.T.: Principles of Dynamics. Prentice Hall, Upper Saddle River (1988)
Roberson, R.E., Schwertassek, R.: Dynamics of Multibody Systems. Springrt, Berlin (1988)
Shabana, A.A.: Dynamics of Multibody Systems, 5th edn. Cambridge University Press, Cambridge (2020)
Patel, M., Shabana, A.A.: Locking alleviation in the large displacement analysis of beam elements: the strain split method. Acta Mech. 229(7), 2923–2946 (2018)
Calisti, M., Giorelli, M., Levy, G., Mazzolai, G., Hochner, B., Laschi, C., Dario, P.: An octopus-bioinspired solution to movement and manipulation for soft robots. Bioinspir. Biomim. 6(3), 036002 (2011)
Ma, L., Wei, C., Zhao, Y.: Modeling and verification of a RANCF fluid element based on cubic rational bezier volume. ASME J. Comput. Nonlinear Dyn. 15, 041005 (2020)
Jing, L., Li, K., Yang, H., Chen, P.Y.: Recent advances in integration of 2D materials with soft matter for multifunctional robotic materials. Mater. Horiz. 7(1), 54–70 (2020)
Maqueda, L.G., Shabana, A.A.: Poisson modes and general nonlinear constitutive models in the large displacement analysis of beams. J. Multibody Syst. Dyn. 18(3), 375–396 (2007)
Acknowledgments
This research was supported by the National Science Foundation (Projects # 1632302 and 1852510).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Shabana, A.A., Eldeeb, A.E. Relative orientation constraints in the nonlinear large displacement analysis: application to soft materials. Nonlinear Dyn 101, 2551–2575 (2020). https://doi.org/10.1007/s11071-020-05839-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-020-05839-5