
Abstract
High-quality satellite orbits and clocks are necessary for multi-GNSS precise point positioning and timing. In undifferenced GNSS solutions, the quality of orbit and clock products significantly influences the resulting position accuracy; therefore, for precise positioning in real time, the corrections for orbits and clocks are generated and distributed to users. In this research, we assess the quality and the availability of real-time CNES orbits and clocks for GPS, GLONASS, Galileo, and BeiDou-2 separated by satellite blocks and types, as well as the product quality changes over time. We calculate the signal-in-space ranging error (SISRE) as the main orbit and clock quality indicator. Moreover, we employ independent orbit validation based on satellite laser ranging. We found that the most accurate orbits are currently available for GPS. However, Galileo utmost stable atomic clocks compensate for systematic errors in Galileo orbits. As a result, the SISRE for Galileo is lower than that for GPS, equaling 1.6 and 2.3 cm for Galileo and GPS, respectively. The GLONASS satellites, despite the high quality of their orbits, are characterized by poor quality of clocks, and together with BeiDou-2 in medium and geosynchronous inclined orbits, are characterized by SISRE of 4–6 cm. BeiDou-2 in geostationary orbits is characterized by large orbital errors and the lowest availability of real-time orbit and clock corrections due to a large number of satellite maneuvers. The quality of GNSS orbit and clock corrections changes over time and depends on satellite type, block, orbit characteristics, onboard atomic clock, and the sun elevation above the orbital plane.
Similar content being viewed by others


Introduction
The precise, highly accurate orbit and clock products, which support all global navigation satellite systems (GNSS), including GPS, GLONASS, Galileo, and BeiDou, are becoming more accessible to all users that expect accurate position, navigation, and timing services. The GNSS community owes that to the International GNSS Service (IGS) Multi-GNSS Pilot Project (MGEX), which has been providing multi-GNSS products for almost ten years (Montenbruck et al. 2017). Thanks to MGEX, most of the applications of multi-GNSS data, such as kinematic or static positioning, navigation, and timing, are nowadays possible. However, due to the delay of approximately 14 days in the final product availability, there is a necessity to provide other products for real-time (RT) users. One of the possibilities is to transmit precise corrections via the Internet or throughout microwave signals transmitted by the augmentation services. GPS/GLONASS RT users may employ the IGS real-time service (IGS-RTS), which started in 2013. Multi-GNSS users may take advantage of single analysis data centers, such as the Centre National d'Études Spatiales (CNES) products that include precise orbits, clocks, biases, and ionosphere corrections (Laurichesse et al. 2009; Katsigianni et al. 2019). These products are mainly used for positioning purposes; however, they can also be used in atmospheric research or for the time transfer (Li et al. 2018).
The algorithms and models used in orbit determination and clock modeling are continuously improved; therefore, the accuracy of the multi-GNSS products evolves. Hence, real-time products have already been analyzed. Hadas and Bosy (2014) analyzed IGS-RT products and showed a clear advantage of the GPS product quality over the quality of products provided for GLONASS. In addition, Kazmierski et al. (2018b) showed significant differences in the quality of CNES-RT products for individual GNSS systems. The high consistency between multi-GNSS products being used in the processing is important in terms of the integration of multi-GNSS observations, which depends on the consistency between products for different GNSS. However, the quality of GNSS orbits and clocks is not the same for all systems, signals, satellite types, blocks, and orbit types, due to various GNSS generations employing different technologies. Knowing the quality of orbit and clocks increases the quality of the positioning or the tropospheric delay estimation through, e.g., appropriate stochastic modeling, and assigning the proper inter-system observation weighting schemes (Kazmierski et al. 2018a; Hadas et al. 2019b). The previous research by Kazmierski et al. (2018b) on the quality of RT products covered a short period of one-month data and showed the heterogeneity of the quality between different GNSS. In this research, a long time series of the RT multi-GNSS orbit and clock products are an object of evaluation.
In literature, it is not only the quality of clock and orbit products being assessed but also the quality of navigation messages. These latter are actually used much more often than precise products due to the availability and ease of using low-cost GNSS receivers installed, e.g., in smartphones. Montenbruck et al. (2015, 2018) evaluated multi-GNSS broadcast ephemeris using final MGEX products and found that the accuracy of broadcast products substantially differs for different GNSS systems. For the quality assessment of broadcast products, the signal-in-space ranging error (SISRE) was employed. The SISRE values for broadcast ephemeris are 0.6 m, 0.2 m, 1 m, and 2 m for GPS, Galileo, BeiDou-2, and GLONASS, respectively (Montenbruck et al. 2018). Hadas et al. (2019a) confirmed the superior quality of Galileo orbits and clocks, which allows for Precise Point Positioning (PPP) with a several-centimeter accuracy based on broadcasted data even without any further corrections. Wu et al. (2020) conducted a long-term analysis of the quality of Galileo broadcast messages for the timespan between 2015 and 2019.
The quality of RT products is one of the main limiting factors for absolute positioning techniques, including PPP (Malys and Jensen 1990; Zumberge et al. 1997), which employs carrier phase and code observations. Precise RT products may also increase the quality of the most common positioning method called single point positioning (SPP) that employs code observations. Short latency of streamed products enables obtaining an RT position based on broadcast ephemeris orbit and clock enhanced with RT corrections.
Goal of this study
This research is devoted to the evaluation of the time-variable quality of the multi-GNSS RT corrections generated by CNES. The previous analyses of RT products do not cover periods longer than one month of data, which is a substantial limitation for rapidly developing GNSS. In this research, the period of almost three years, from 2017 to the end of 2019, is assessed when several significant improvements in the orbit determination and the GNSS data modeling occurred. We show the availability and the quality evolution of multi-GNSS products over time and the incidental problems that may occur for corrections provided via Internet streams. We employ the signal-in-space ranging error (SISRE) parameter, which was originally used for broadcast orbits, for the evaluation of the quality of the RT orbit and clock products. SISRE is discussed in detail in the orbit comparison section. The analyses are conducted separately for all satellite blocks or types. We evaluate the quality of orbits and clocks during the eclipsing periods for individual satellite types and assess the dependency between the SISRE values and the elevation of the sun above the orbital planes. Eventually, we verify whether the high-accurate hydrogen masers and rubidium clocks onboard new GNSS satellites reduce the total SISRE values by absorbing a part of systematic errors embedded in orbit products.
Real-time products evaluation
The product validation process is divided into two independent parts. The first part involves comparing CNES RT products with final products delivered by the Center for Orbit Determination in Europe (CODE, Prange et al. 2017) in the frame of MGEX. We discuss the quality of orbits and clocks separately for different orbit types and blocks, and finally by providing SISRE values. The second stage employs optical satellite laser ranging data as an independent validation tool (Pearlman et al. 2019; Bury et al. 2019, 2020).
Orbit comparison
We evaluate orbit and clock data provided by CNES via CLK93 mount point. CNES RT products can be stored and analyzed as continuous CLK93 stream corrections, or the same orbit and clocks can be downloaded from the server. Here, RT products stored by CNES in standard sp3 files converted from the RT format are used to exclude transmission data issues that may occur for RT products because of the internet disconnection or interruptions in server operations. Those products are available on the PPP-Wizard project website: https://www.ppp-wizard.net/products/REAL_TIME/. Three years of data from January 2017 to November 2019 with the sampling interval of 5 min are considered. As the evaluated stream provides multi-GNSS data, the products provided by CODE were used as reference data denoted as COM. IGS provides combined experimental multi-GNSS orbits (Sośnica et al. 2020). However, the multi-GNSS clocks are not yet combined by IGS, thus cannot be employed as reference. CODE was the first MGEX analysis center providing high-quality five-system GNSS solutions and employs different data processing schemes than CNES; thus, COM products may serve as an independent reference solution. COM products are also stored in sp3 files. Due to the issues with the orbit determination for geostationary satellites (GEO), official COM products do not cover BeiDou GEO: PRN C01 to C05. During the test period, the sampling interval of COM sp3 was changed. From January 1, 2017, to August 5, 2017, the sampling interval was equal to 15 min and after this date, it was switched into 5 min. In the evaluation, common epochs from both reference and test files were taken into account without any data resampling.
The comparison of the orbit files is made in the Bundesamt für Kartographie und Geodäsie (BKG) Ntrip Client software (BNC) v. 2.12.11 (Weber and Mervart 2009) using the sp3 compare option. The data obtained from the comparison contained satellite position differences decomposed into the radial, along-track, and cross-track components and clock differences. The orbit and clock residuals were used to the further compute SISRE based on a formula proposed by Montenbruck et al. (2015):
where RMS is a root mean square error, \({{\varvec{w}}}_{{\varvec{R}}}\) and \({{\varvec{w}}}_{{\varvec{A}},{\varvec{C}}}^{2}\) are GNSS-dependent SISRE weight factors for the statistical contribution of radial (R), along-track (A), and cross-track (C) errors to the line-of-sight ranging error. \({\Delta {\varvec{r}}}_{{\varvec{R}}}\) and \(\Delta {\varvec{c}}{\varvec{d}}{\varvec{t}}\) are the residuals for the radial and clock components, respectively, and A and C are the RMS of the along-track and cross-track orbit components. The coefficients used for SISRE computation are provided in Table 1 (after Montenbruck et al. 2015). The SISRE coefficients mainly depend on the orbit height of the particular GNSS.
Although the SISRE was originally designed for the broadcast ephemeris evaluation, it may also serve as a quality indicator for the assessment of precise RT products. We employ the SVN numbers for individual satellites as they uniquely identify the spacecraft, because sp3 files sort data using the PRN identifiers that are subject to change. For the conversion between PRN and SVN, we used SATELLIT.I14 file from https://ftp.aiub.unibe.ch/BSWUSER52/GEN/.Information contained in the first part of the file allowed avoiding mistakes in identifying particular satellite blocks.
Availability of real-time multi-GNSS products
One of the most important issues for precise positioning is the availability of the products being used. We must remember that even when having perfect orbit and clock corrections, we may be unable to determine the position when the orbit and clocks are temporarily unavailable. The continuity of corrections is crucial for the GNSS applications, which include, e.g., early warning systems or autonomous vehicle control, whose reliability is very important in the context of human safety and thus requires the highest product reliability and continuity of streamed corrections. The satellites providing observations on at least two frequencies are considered in RT products (Table 2), except for Galileo E14 and E18 launched into eccentric orbits and GLONASS-K1 R26, which is not tracked by all MGEX stations.
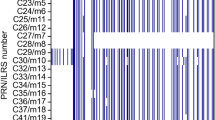
Figure 1 shows the median availability for satellite groups in five-percent ranges from 0 to 100%. We analyze data from the period between the initial epoch for which corrections for a specific satellite were available and November 31, 2019. This is due to the unavailability of corrections for some Galileo and BeiDou satellites during the development phase of the constellations, and thus, there are different initial epochs for newly launched satellites.

Median availability of the real-time clock and orbit corrections in the test period. Groups incorporate satellites with a difference of the availability not larger than ± 5%
The availability for GPS is 97%, with the only exception of G18, whose availability is slightly below 90%, and the testing of G04 with a very low number of corrections and availability of lower than 5%. In recent years, many spacecraft changes took place for G04, and this channel was occupied by different satellites, including SVNs 34, 49, 32, 38, 36, and 74 belonging to blocks IIA, IIR, and III. The availability of GLONASS corrections is at a very high level as for 21 out of 24 satellites; the availability is higher than 90%. However, some problems are observable for R05, R06, and R08, especially due to the lack of corrections for these satellites in 2019. The availability of corrections for Galileo does not fall below 80% and only for 3 satellites is lower than 90%. In total, 19 Galileo satellites have products in 92% of the epochs in the test period. The availability of BeiDou products is around 95% for IGSO and MEO satellites and falls between 76 and 89% for GEO satellites. GEO satellites typically have the largest number of satellite maneuvers for proper maintenance of satellites in their designed positions despite a strong 1:1 resonance between satellite revolution period and earth rotation.
Results of the comparison with CODE final products
Figure 2 illustrates the results of the comparison between epoch-wise satellite positions and clocks delivered from RT and COM products for each GNSS divided by satellite types and blocks. In the case of satellite positions, the lowest differences in the range of single centimeters are for the radial component, for which the differences between individual blocks are also low, especially for GPS and Galileo for which residuals are within the range 5–6 cm. The exceptions include BeiDou satellites, for which the radial differences are from two to three times higher than for other GNSSs and are within the range equal to 12 cm and 18 cm for IGSO and MEO, respectively. It is also worth adding that the radial residuals of GLONASS M+ satellites are the smallest out of all obtained and are in the range from − 3 to + 5 cm with a mean offset of + 1 cm. Only three satellites are included in this set with SVNs R855, R856, and R858. For the along- and cross-track components, the distribution of residuals looks similar. However, the values achieved for these components are greater than for the radial component. Absolute values of along-track residuals are within 10 cm, 14 cm, 20 cm for GPS, Galileo, and GLONASS-M+, and GLONASS-M and GLONASS-K1, respectively. Cross-track residuals are equal to 7 cm, 10 cm, and 17 cm for GPS, Galileo and GLONASS-M+, and for GLONASS-M and GLONASS-K1, respectively. For BeiDou, those components are significantly larger and fall within 30 cm and 60 cm for MEO and IGSO, respectively. For the clocks, the values for individual blocks are smallest with the only exception of block IIA, which was occasionally available in the analyzed period as PRN G04, and from the end of January 2018 as G18, and are equal to 15 cm which is the same for GLONASS-M. GLONASS-M+ and GLONASS-K1 have clock residuals smaller than 15 cm. GPS and Galileo residuals are within 7 cm. Clock corrections for BeiDou once again are larger than for other systems and are equal to 20 cm.

Differences between orbit positions and clocks calculated based on real-time CNES products with reference to COM products for January 2017 to November 2019
SISRE analysis
Figure 3 shows the daily SISRE values for each type or block of the GNSS systems. For block IIA, characterized by a small amount of data and frequent PRN changes, the SISRE reaches up to 20 cm, which is clearly more than for other blocks of GPS. The remaining GPS blocks are characterized by the high consistency and stability with the SISRE values at the level of 2 cm for the entire period considered in the analysis. For GPS, there are no clear periodical quality changes or sudden changes in the value of the analyzed parameter, which could be related to different heights of the sun above orbital planes or changes in orbit models, antenna offsets, or data processing schemes. In the case of GLONASS, the SISRE values are much higher than those for GPS. For GLONASS-M, the SISRE values are in the range of 4–9 cm. GLONASS-M+ and K1 are characterized by small SISRE values with a large spread of the order of 2–6 cm. In 2017, SISRE values changed many times for M+ and K1, and sometimes even exceeded 10 cm. Due to the unavailability of Galileo and BeiDou RT products in the CNES sp3 files, the time series of SISRE begins in 2018. Sudden changes over time characterize the series of Galileo product quality. Four periods can be distinguished: (1) February to September 2018, (2) September 2018 to mid-March 2019, (3) mid-March 2019 to the end of July 2019, and (4) end of July to the end of the test period. These shifts may be connected with the orbit computation strategy changes. The impact of eight new Galileo satellites may be reflected here. The greatest improvement of the product quality occurs between periods 1 and 2 as an upgrade from 3 to 2 cm. The differences between periods 2 and 3, and 3 and 4 are subtle, and it is hard to recognize them as they reach the subcentimeter level. The quality of RT products for BeiDou is worse than the quality of the previously discussed systems. Large differences are noticeable in 2018, and the results for both IGSO and MEO are similar and in the range from 3 to 18 cm. The SISRE for BeiDou products has constantly improved and decreased from 20 cm in 2018 to even less than 10 cm for most cases in 2019. Products for IGSO satellites are much more consistent. Nevertheless, periodic deteriorations are noticeable for this type of satellite in January 2019 and July 2019. This phenomenon is not noticeable for products supplied for MEO satellites. The latest analysis period shows that the accuracy of products is below 4–6 cm with IGSO products having the best consistency.

Real-time SISRE values for orbits and clocks referenced to CODE MGEX products in January 2017 to November 2019
The evolution of the RT product quality for different block and types of GNSS satellites is illustrated as a series of monthly boxplots in Fig. 4. In the case of GPS, SISRE results are very consistent between blocks. Until October 2017 and in January 2018, GPS SISRE exceeds 2 cm, whereas, in the remaining months, SISRE values are generally lower than 2 cm. Once again, block IIA performs much worse than other GPS with SISRE equal to 4 cm and a large spread up to 3 cm. The evolution of the quality of Galileo products is the largest among all the analyzed systems. The SISRE values decrease from 3 cm at the end of 2018 to the level of 2 cm at the end of 2019. Products for GLONASS-M and GLONASS-M+ have very stable SISRE values in the test period. Some problems occur for GLONASS-K1 until October 2017, which corresponds to inferior SISRE for GPS at the beginning of the test period. These overlapping periods may indicate a change in computing strategy at the CNES analysis center in November 2017. At the beginning of 2018, BeiDou products have SISRE equal to 5 cm. Later, until February 2019, SISRE assumes higher values reaching up to 15 cm. Since March 2019, the quality of products provided for BeiDou again reaches 5 cm.

Monthly SISRE evolution in time in January 2017–November 2019. Please note different y-axes for GPS and Galileo (up to 5 cm) and GLONASS and BeiDou (up to 20 cm)
Figure 5 illustrates SISRE values grouped by GNSS types and blocks. Figure 5a shows the first month of the analysis; Fig. 5b shows the entire analysis period, whereas Fig. 5c shows the last month of the analysis, November 2019. Figure 5 illustrates the scale of the progress in the quality improvement of RT products for individual GNSS systems. The best results are obtained for GPS and Galileo products. Throughout the whole period, the median SISRE values for GPS blocks are at the level of 2 cm when excluding block IIA. Similar results are obtained for Galileo with the median SISRE of 2 cm. However, for Galileo and GPS, slightly larger discrepancies sporadically occur, as the maximum SISRE values reach 4 cm. Products for GLONASS M+ and K1 are about two times less accurate than those for GPS and Galileo, with a median SISRE of 4 cm. The largest number of GLONASS satellites belong to M-type that are characterized by SISRE of almost 7 cm. BeiDou products in all test periods are least accurate with median SISRE of 6–7 cm and with single SISRE values exceeding 20 cm. Considering only the last month of the analysis period, November 2019, it should be noted that all products improved with respect to the first month of the analysis period. The SISRE quality improvement is from 3 to 20% for GPS, from 18 to 56% for GLONASS, 32% for Galileo IOV, 38% and Galileo FOC, 0% for BeiDou MEO, and 21% for BeiDou IGSO. The progress of the product quality improvement is augmented by the fact that the median SISRE is just 1.6 and 1.7 cm for Galileo IOV and FOC, respectively, in November 2019. For the most accurate GPS blocks, the median SISRE is 1.7 cm, which means that the quality of Galileo satellites slightly exceeds the quality of GPS products. The quality of BeiDou IGSO products improved by one-fifth with respect to the all months SISRE value resulting in SISRE for IGSO products of 3.9 cm, thus more accurate than those available for GLONASS-M with SISRE of 5.5 cm in November 2019. GLONASS M+ and K1 have a median SISRE of 3.3 cm; however, this value strongly varies over time.

SISRE values calculated for real-time products referenced to CODE MGEX products for a GPS and GLONASS—January 2017, Galileo and BeiDou—February 2018, b January 2017–November 2019, c November 2019
Figure 6 illustrates the dependency of the SISRE value on the height of the sun above the orbital plane (β). The RT products of all systems show a decrease in the quality for low | β | angles. The satellite eclipsing seasons are when | β | is below 8.6°, 12.3°, 13.1°, 13.5°, and 14.3° for BeiDou IGSO, Galileo, BeiDou MEO, GPS, and GLONASS, respectively. In addition, BeiDou-2 satellites employ the normal orbital mode when | β | < 4°, which is challenging for proper orbit modeling because then the satellite solar panels are not perpendicular to the sun causing side accelerations. The dependency between the β angle and SISRE is minor for GPS and Galileo when | β | exceeds 35° with near-constant SISRE below 2 cm. Once again, block IIA is an outlier and has much worse results for low β angles than other GPS blocks, and stabilizes after 50° at the level of 5 cm. Steering issues can explain this worse performance for block IIA during the eclipsing periods; however, the observed errors substantially go beyond the eclipsing periods. However, GPS block IIA satellites were designed for a 5-year operation, whereas they have been now active for more than 25 years. In the case of GLONASS, the dependency of the product quality on the β angle is also noticeable, especially for M+ and K1 satellites, whereas GLONASS-M satellites are slightly less burdened with β-dependency. The extreme values of the SISRE parameter for the minimum and maximum β angles differ by 0.6, 0.6, and 0.9 cm for M, and M+, and K1, respectively. A considerable relationship between the SISRE value and β occurs in the case of BeiDou satellites. The largest SISRE changes for MEO occur for | β | angles from 0 to 15°. For | β | greater than 15°, the changes are no longer that large and the last significant change is for | β | equal 35° for which SISRE values are smaller by about 0.5 cm and stabilize at the level of 6 cm. SISRE values of IGSO are much more susceptible to the β angle. The threshold β, above which the SISRE values do not significantly change, equals to 45°, for which SISRE stabilizes at the level of 5.4 cm for IGSO.

Dependency of median SISRE values on the absolute height of the sun above the orbital plane (β)
SISRE values can be decomposed into the clock, satellite radial, cross-track, and along-track components by assuming that the contribution of errors emerging from other components is reduced to zero. Figure 7 illustrates median values of SISRE decomposed into errors of along-track and cross-track orbit components, total orbit error that includes radial, along-track, and cross-track, as well as the overall SISRE including all orbit and clock contributions for the last month of the test period. The along- and cross-track components have the least impact on the total SISRE values, which is justified by weight factors from Table 1. Nevertheless, along- and cross-track components account for about 55 and 40% of the total SISRE value for BeiDou IGSO and MEO, respectively. The impact of these orbit components on the SISRE value of other systems is 30%.

Decomposition of SISRE values into sub-components for November 2019
In the case of GLONASS and BeiDou MEO, the total SISRE value is greater than the orbit-only SISRE, which means that the satellite clocks increase the total error. In the case of Galileo and BeiDou IGSO, the total SISRE value is smaller than the orbit SISRE, which means that clocks compensate for the systematic errors included in the orbital radial component. The smaller total SISRE value than the orbit SISRE, and thus the correction of the orbits by clocks, is possible when the level of clock noise is smaller than the level of systematic errors embedded in the radial component. This also implies that the Galileo and BeiDou orbit models can further be improved as they still contain not only random but also systematic errors. For GPS and BeiDou MEO, the total SISRE is almost at the same level as the orbit SISRE, which means that the satellite clocks neither improve not deteriorate the total error budget.
The total SISRE for GPS and Galileo is similar at the level of 1.6–2.3 cm, but the positive influence of clocks for the Galileo system is larger than that for GPS. Galileo is the satellite system with the lowest SISRE values of the RT products out of all GNSS systems, which is similar to the SISRE values for broadcast ephemeris (Montenbruck et al. 2017). In the case of GLONASS, for which the clocks increase the SISRE value from 3.9 to 5.1 cm, the lack of reduction may additionally be connected with the presence of intra-system biases. Median SISRE with extreme values for the last month of the analysis are presented in Table 3.
SLR validation
Satellite laser ranging (SLR) normal points provided by CDDIS (Noll et al. 2019) are used to validate RT orbits provided by CNES. Apart from GPS, all the rest of the analyzed satellites are equipped with the laser retroreflector arrays for laser ranging. Thus, the SLR validation covers GLONASS, Galileo, and BeiDou satellites, including BeiDou GEO, which could not be taken into account when comparing RT and COM products. Discrete satellite positions from sp3 files are used to fit 1-day continuous orbital arcs. Differences in orbit modeling are absorbed by the stochastic pulses estimated in radial, along-track, and cross-track directions every 30 min, which is similar to the processing strategy employed at the International Laser Ranging Service (ILRS) Associate Analysis Center at UPWr (Zajdel et al. 2017). The SLR station coordinates and observations are corrected by tidal station displacements, tropospheric refraction, general relativistic effect, and other corrections recommended by the International Earth Rotation and Reference Systems Service (IERS) 2010 Conventions (Petit and Luzum 2010) in Bernese GNSS Software (Dach et al. 2015). The final arc fit falls within the scope of single millimeters.
The SLR residuals are first cleaned from outliers. Thresholds equal to 5 m were used for GEO satellites, while for the other satellites, the SLR observation residuals exceeding 0.5 m were removed. Typical SLR analyzes use much lower thresholds to define the level of outliers, typically at 3-sigma level (Sośnica et al. 2015) or fixed 0.15 m threshold for the validation of precise final orbit products (Zajdel et al. 2017). The increased tolerance was employed to avoid eliminating residuals whose higher values may not result from the imperfections of the SLR technique but the poorer quality of the analyzed RT orbits. Boxplots in Fig. 8 show SLR residuals for particular satellite blocks and types, while bars depict the number of the outliers divided into two groups: (1) large outliers removed using the abovementioned thresholds, (2) values exceeding lower and upper whiskers of the boxplot which correspond to 2.7 sigmas assuming that the observations would have the normal distribution. The outlier rejection level is, in general, up to 10%. Exceptions are GEO and IGSO BeiDou satellites, for which outlier rejection level reaches more than 15% because of orbit modeling issues, especially during the eclipsing seasons.

SLR residuals from the validation of real-time orbits divided into specific GNSS blocks and types (boxplots; left axis description) and corresponding outliers (bars; right axis description); a January 2017–November 2019, b November 2019
Interestingly, SLR residuals at a similar level were obtained for the precise final IGS combined orbits by Sośnica et al. (2020), which implies the comparable orbit quality despite the real-time nature of the products analyzed in this research. The quality of the CODE products is at the comparable level as the RT products with slightly different offsets, which can be related to various embedded systematic errors due to different orbit modeling strategies applied. However, the number of outliers in CODE and RT products is comparable only for the GLONASS system. For other systems, the number of outliers in RT products is approximately two times higher than that in CODE products. This may indicate that RT products are less robust and need to be verified despite their high quality.
Table 4 shows standard deviation and mean offset for all satellite types both for CNES RT and final CODE products. Based on the SLR validation of RT orbits, whose results are presented in Fig. 8, the best quality of orbit products is achieved for GLONASS and Galileo satellites. The standard deviation of SLR residuals for GLONASS and Galileo is at the level of 2.5 cm, regardless of the satellite type. Moreover, RT products for GLONASS K1 bring a median of SLR residuals very close to 0 cm. However, during the test period, there was only one spacecraft of this type available, R09, because K1 R26 is not included in RT streams. GLONASS-M and M+ have a similar distribution of the residuals; however, type M satellites are affected with a negative offset of − 1.0 cm while M+ with a positive offset of + 3.0 cm. Both types of Galileo satellites have a negative offset close to − 1.0 cm. For BeiDou satellites, the results show 2.7 and 1.6 worse quality of MEO and IGSO orbits, respectively comparing to GLONASS and Galileo. The GEO satellite has an offset of -26.0 cm and standard deviation of SLR residuals of 25.4 cm, which practically excludes the possibility of using this type of satellites in precise positioning and applications that require the highest accuracy of products. Interestingly, SLR residuals at a similar level were obtained for the precise final IGS combined orbits by Sośnica et al. (2020), which implies the comparable orbit quality despite the real-time nature of the products analyzed in this research. The quality of the CODE products is at the comparable level as the RT products with slightly different offsets, which can be related to various embedded systematic errors due to different orbit modeling strategies applied. However, the number of outliers in CODE and RT products is comparable only for the GLONASS system. For other systems, the number of outliers in RT products is approximately two times higher than that in CODE products. This may indicate that RT products are less robust and need to be verified despite their high quality.
Figure 9 shows the SLR residuals for the specific GNSS types as a function of the absolute height of the sun above the orbital plane (β) and the argument of the latitude of the satellite with respect to the argument of the latitude of the sun (Δu). First of all, we may find the characteristic pattern of increased SLR residuals for Galileo IOV satellites when the β is close to the maximum values. On the other hand, the number of the outliers for low β angles indicates an outlier concentration below 12° and 6° for IGSO and MEO BeiDou satellites, respectively. This fact may be connected with normal satellite mode and issues with a proper orbit modeling for eclipsing satellites. In the case of Galileo and GLONASS, any outlier densification does not occur and seems to be independent of the satellite-sun configuration. The dependency of SLR residuals on the argument of latitude is present for most of the RT orbit products. GLONASS and BeiDou satellites have lower residual values for observations collected closer to the sun, while in terms of Galileo, the values of residuals have opposite signs. These patterns can substantially be reduced when applying the a priori box-wing model, which considers the higher-order solar radiation pressure perturbations (Bury et al. 2020).

SLR residuals for GNSS-specific types as a function of the absolute height of the sun above the orbital plane (β) with respect to the argument of the latitude of the sun (Δu). All values are expressed in mm
Conclusions
We analyzed the quality of the CNES RT multi-GNSS orbit and clocks over the period of 3 years, between 2017 and 2019. It should be emphasized that RT CLK93 products consider 92 GNSS satellites, out of which for 76 satellites, the product availability exceeds 90% in the analyzed period. The best availability of products is for GPS, with a value of 97% for all epochs. For other systems and the majority of the satellites, the availability is only slightly lower than for GPS. One has to keep in mind that in the considered period, Galileo and BeiDou were still being developed. The lower RT product availability is for one GPS satellite and several GLONASS satellites, which during the test period were subjected to maneuvers or switches between PRNs, which made it difficult to ensure a continuity of RT corrections. GEO satellites have a noticeably lower availability, below 90%. In 2019, the availability of GPS, GLONASS, and Galileo RT corrections exceeded 95%.
The RT products are still heterogeneous for different systems, satellite types, and periods. The values of the SISRE parameter range from 2 to 20 cm in the entire analyzed period, or up to 8 cm in the last analyzed month. In November 2019, the SISRE values in multi-GNSS RT products were 2.3, 5.2, 1.6, 5.5, and 3.9 cm for GPS, GLONASS, Galileo, BeiDou MEO, and BeiDou IGOS, respectively. From the SLR analysis, we found that the quality of BeiDou GEO is about ten times worse than that of other GNSS satellites and the SLR residuals may even exceed the level of 1 m. The quality of broadcast orbits for Galileo or GPS is thus better than precise and RT orbits for BeiDou GEO. In April 2016, the SISRE values were equal to 3.1, 8.7, 9.9, 11.1, and 12.3 cm for GPS, GLONASS, Galileo, BeiDou MEO, and BeiDou IGSO, respectively (Kazmierski et al. 2018a). The scale of the change shows how much progress has been achieved in the context of RT product quality.
GPS satellites from block IIA indicate a lower quality of SISRE when compared to other blocks of the GPS constellation. Moreover, SISRE of GPS IIA, BeiDou MEO, and IGSO show a strong dependency on beta angles, as opposed to other satellites, which even in eclipsing periods have comparable quality to non-eclipsing seasons.
The total SISRE value is lower than the orbital SISRE for Galileo and BeiDou IGSO, which means that the satellite clock corrections absorb the systematic orbit errors in the radial direction and reduce the value of total SISRE. The quality of clocks onboard GLONASS satellites is much lower than those on other GNSS satellites, and as a result, GLONASS clock corrections increase orbital SISRE by 40%. In the case of GPS and BeiDou MEO, the clocks neither improve nor deteriorate the total SISRE values. GLONASS M+ and K1 are characterized by SISRE values smaller by 40% with respect to GLONASS-M satellites, however, GLONASS-M+ show positive offsets of + 3 cm in the SLR analysis. Due to the more accurate clocks, Galileo actually is the system with the smallest total RT SISRE values out of all GNSS systems.
GNSS constellations can be divided into four main groups based on the quality of RT orbits and clocks: (1) Galileo FOC and IOV, GPS IIR-A, IIR-B, IIR-M, IIF with the median SISRE of 2 cm, (2) GLONASS M+ and K1, BeiDou-2 IGSO with the median SISRE of 3–4 cm, (3) GLONASS M, BeiDou-2 MEO and GPS IIA with the median SISRE of 5–5.5 cm, and (4) BeiDou-2 GEO with the mean offset of SLR residuals of 24 cm. Therefore, the proper weighting of multi-GNSS solutions is indispensable with consideration of differences in qualities of RT orbits and clocks in stochastic models to assure the best possible performance of multi-GNSS solutions. Such a stochastic model based on static SISRE values was proposed by Kazmierski et al. (2018b). However, the quality of orbits and clocks for new GNSS systems evolves. Thus, the stochastic model should be time-dependent to reflect the actual accuracy of orbits and clocks for undifferenced multi-GNSS PPP and SPP solutions, in which the accuracy of determining positions directly depends on the accuracy of input orbits and clocks.
References
Bury G, Sośnica K, Zajdel R (2019) Multi-GNSS orbit determination using satellite laser ranging. J Geod 93:2447–2463. https://doi.org/10.1007/s00190-018-1143-1
Bury G, Sośnica K, Zajdel R, Strugarek D (2020) Toward the 1-cm Galileo orbits: challenges in modeling of perturbing forces. J Geod 94:1–19. https://doi.org/10.1007/s00190-020-01342-2
Dach R, Lutz S, Walser P, Fridez P (2015) Bernese GNSS software version 5.2. user manual. Astronomical Institute, University of Bern, Bern Open Publishing, Bern
Hadas T, Bosy J (2014) IGS RTS precise orbits and clocks verification and quality degradation over time. GPS Solut 19:93–105. https://doi.org/10.1007/s10291-014-0369-5
Hadas T, Kazmierski K, Sośnica K (2019a) Performance of Galileo-only dual-frequency absolute positioning using the fully serviceable Galileo constellation. GPS Solut 23:108. https://doi.org/10.1007/s10291-019-0900-9
Hadas T, Turbanska-Guzniczak A, Kazmierski K, Sośnica K (2019b) Inter-system weighting for improved multi-GNSS real-time ZTD estimation. In: Geophysical research abstracts, vol. 21, EGU2019-13099
Katsigianni G, Loyer S, Perosanz F, Mercier F, Zajdel R, Sośnica K (2019) Improving Galileo orbit determination using zero-difference ambiguity fixing in a multi-GNSS processing. Adv Sp Res 63:2952–2963. https://doi.org/10.1016/j.asr.2018.08.035
Kazmierski K, Hadas T, Sośnica K (2018a) Weighting of multi-GNSS observations in real-time precise point positioning. Remote Sens 10:84. https://doi.org/10.3390/rs10010084
Kazmierski K, Sośnica K, Hadas T (2018b) Quality assessment of multi-GNSS orbits and clocks for real-time precise point positioning. GPS Solut 22:11. https://doi.org/10.1007/s10291-017-0678-6
Laurichesse D, Mercier F, Berthias JP, Broca P, Cerri L (2009) Integer ambiguity resolution on undifferenced GPS phase measurements and its application to PPP and satellite precise orbit determination. Navig J Inst Navig 56:135–149. https://doi.org/10.1002/j.2161-4296.2009.tb01750.x
Li G, Lin Y, Shi F, Liu J, Yang Y, Shi J (2018) Using IGS RTS products for real-time subnanosecond level time transfer. In: Lecture notes in electrical engineering. Springer, pp 505–518
Malys S, Jensen PA (1990) Geodetic point positioning with GPS carrier beat phase data from the CASA UNO experiment. Geophys Res Lett 17:651–654. https://doi.org/10.1029/GL017i005p00651
Montenbruck O, Steigenberger P, Hauschild A (2015) Broadcast versus precise ephemerides: a multi-GNSS perspective. GPS Solut 19:321–333. https://doi.org/10.1007/s10291-014-0390-8
Montenbruck O, Steigenberger P, Hauschild A (2018) Multi-GNSS signal-in-space range error assessment—methodology and results. Adv Space Res 61:3020–3038. https://doi.org/10.1016/j.asr.2018.03.041
Montenbruck O, Steigenberger P, Prange L, Deng Z, Zhao Q, Perosanz F, Romero I, Noll C, Stürze A, Weber G, Schmid R, MacLeod K, Schaer S (2017) The multi-GNSS experiment (MGEX) of the international GNSS service (IGS)—achievements, prospects and challenges. Adv Space Res 59:1671–1697. https://doi.org/10.1016/j.asr.2017.01.011
Noll CE, Ricklefs R, Horvath J, Mueller H, Schwatke C, Torrence M (2019) Information resources supporting scientific research for the international laser ranging service. J Geod 93:2211–2225. https://doi.org/10.1007/s00190-018-1207-2
Pearlman M, Arnold D, Davis M, Barlier F, Biancale R, Vasiliev V, Ciufolini I, Paolozzi A, Pavlis EC, Sośnica K, Bloßfeld M (2019) Laser geodetic satellites: a high-accuracy scientific tool. J Geod 93:2181–2194. https://doi.org/10.1007/s00190-019-01228-y
Petit G, Luzum B (2010) IERS conventions (2010). Bur Int Des Poids Mes Sevres, pp 1–179
Prange L, Orliac E, Dach R, Arnold D, Beutler G, Schaer S, Jäggi A (2017) CODE’s five-system orbit and clock solution—the challenges of multi-GNSS data analysis. J Geod 91:345–360. https://doi.org/10.1007/s00190-016-0968-8
Sośnica K, Thaller D, Dach R, Steigenberger P, Beutler G, Arnold D, Jäggi A (2015) Satellite laser ranging to GPS and GLONASS. J Geod 89:725–743. https://doi.org/10.1007/s00190-015-0810-8
Sośnica K, Zajdel R, Bury G, Bosy J, Moore M, Masoumi S (2020) Quality assessment of experimental IGS multi-GNSS combined orbits. GPS Solut 24:54. https://doi.org/10.1007/s10291-020-0965-5
Weber G, Mervart L (2009) The BKG Ntrip Client (BNC). In: Report on EUREF symposium 2007 in London, vol 42. Mitteilungen des Bundesamtes fuer Kartographie und Geodaesie
Wu W, Guo F, Zheng J (2020) Analysis of Galileo signal-in-space range error and positioning performance during 2015–2018. Satell Navig 1:6. https://doi.org/10.1186/s43020-019-0005-1
Zajdel R, Sośnica K, Bury G (2017) A new online service for the validation of multi-GNSS orbits using SLR. Remote Sens 9:1049. https://doi.org/10.3390/rs9101049
Zumberge JF, Heflin MB, Jefferson DC, Watkins MM, Webb FH (1997) Precise point positioning for the efficient and robust analysis of GPS data from large networks. J Geophys Res Solid Earth 102:5005–5017. https://doi.org/10.1029/96jb03860
Acknowledgements
This work has been supported by the Polish National Science Center (UMO-2018/29/B/ST10/00382) and the Project EPOS—European Plate Observing System (POIR.04.02.00-14-A0003/16) co-financed by the European Union from the European Regional Development Fund, Operational Programme Smart Growth 2014. Kamil Kazmierski is supported by the Foundation for Polish Science (FNP). We acknowledge the Centre National d'Études Spatiales (CNES) for providing RT streams, BKG for providing the open-source BNC software, IGS MGEX, and CODE for providing a variety of multi-GNSS products, and ILRS for providing SLR measurements.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Kazmierski, K., Zajdel, R. & Sośnica, K. Evolution of orbit and clock quality for real-time multi-GNSS solutions. GPS Solut 24, 111 (2020). https://doi.org/10.1007/s10291-020-01026-6
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10291-020-01026-6