Economic Aspects of Driving Various Types of Vehicles in Intelligent Urban Transport Systems, Including Car-Sharing Services and Autonomous Vehicles



Department of Automotive Vehicle Construction, Faculty of Transport and Aviation Engineering, Silesian University of Technology, 8 Krasińskiego Street, 40-019 Katowice, Poland
*
Author to whom correspondence should be addressed.
Appl. Sci. 2020, 10(16), 5580; https://doi.org/10.3390/app10165580
Submission received: 24 June 2020
/
Revised: 9 August 2020
/
Accepted: 10 August 2020
/
Published: 12 August 2020
(This article belongs to the Special Issue Intelligent Transportation Systems: Beyond Intelligent Vehicles)
Abstract
:Nowadays, the concept of new mobility solutions like shared mobility systems is becoming more and more popular in current transport systems. The next technological step will be the idea of replacing traditional vehicles with autonomous ones. Because autonomous vehicles are a new concept in the automotive market, we dedicated this article to the idea of using autonomous vehicles as a part of car-sharing systems in intelligent, urban transport systems. The research herein is focused on the economic aspects of using autonomous vehicles in comparison to the classic car fleet available in car-sharing systems and to vehicles that belong to individual owners. We present our method for appropriate fleet selection based on the Delphi method and the calculations made through a scientific experiment performed based on Hartley’s plan. The results indicate the relation of travel parameters (including vehicle type) to the total cost of travel in urban transport systems. We also present the main terms related to autonomous vehicles. This article provides support for people who want to deepen knowledge about autonomous vehicles and new mobility solutions used in urban transport systems.
1. Introduction
Currently, urban transport systems are using more and more intelligent solutions based on the use of a smartphone to provide access to the service. This kind of trend refers to the idea of Mobility as a Service, called MaaS. MaaS describes a shift away from personally owned modes of transportation and towards mobility provided as a service. One of the solutions more and more commonly chosen by individual users is car-sharing systems.
The car-sharing system is a model complementing the public transport service. It is based on the short-term rental of cars offered by operators in selected areas—mostly in cities. Its concept is similar to that of typical car rentals, with the difference being that cars can be rented for less than an hour [1,2,3]. According to that principle, car-sharing is regarded as an alternative to having one’s own vehicle with secured availability and maintenance [4,5].
There are three main types of car-sharing systems: round-trip car-sharing systems, one-way car-sharing systems, and free-floating [6,7,8,9,10]. The main difference between the types of systems is in the vehicle location and vehicle return policy. The diversity of car-sharing systems is presented in Figure 1.
Since May 2019, car-sharing services have been offered in 3128 cities, in 59 countries, which represents 30% of the entire world [11]. There are currently 236 operators in the world [11]. The most popular service model is the one-way car-sharing currently operating in 51 countries [11]. Free-floating car-sharing system, in turn, operates in 36 countries around the world [11].
Currently, the fleet of vehicles available in car-sharing systems mainly comprises conventional cars. However, hybrid and electric vehicles are gradually being implemented. It would seem that according to the assumptions of car-sharing as providing rental vehicles in cities, it should be based on small city cars that can be easily parked in a small parking space [9,12]. However, scientific studies conducted on a fleet of 187 vehicles from 40 car-sharing systems operating in 25 European countries showed that mainly C-class vehicles predominate [13]. That class is a lower, medium type of passenger car, called compact cars, with a compact design ensuring relative driving comfort for four adults and moderately large luggage space [13].
Because the current trend is the use of increasingly technologically advanced vehicles that will be able to adapt to intelligent transport systems, and furthermore, due to the fact of growing interest in replacing traditional vehicles with autonomous ones, we decided to question the possibility of using autonomous vehicles in intelligent systems. In this article, we present our method of appropriate fleet selection based on the Delphi method and calculations made through a scientific experiment performed based on Hartley’s plan. The results indicate the relation of travel parameters (including vehicle type) to the total cost of travel in urban transport systems. We also present the main terms related to autonomous vehicles. This article provides support for people who want to deepen knowledge about autonomous vehicles and new mobility solutions used in urban transport systems.
2. Autonomous Vehicles
Autonomous vehicles, also called self-driving vehicles or driverless vehicles, are appropriate means of transport that are capable of sensing their environment and navigating without human input [14]. Autonomous cars use tools such as a Global Positioning System (GPS), odometry, radar, laser lights, and computer vision for independent movement [15,16]. The use of these types of technology allows vehicles to identify the route, obstacles, and barriers occurring on the road, and to read the content of signs [14,15,16].
Autonomous vehicles have nomenclature specific to this group. This begins with the definition of the group of autonomous vehicles themselves: automatic or automated. However, it is worth explaining the detailed differences between specific terms. The main difference between the terms is related to the degree of involvement of human support in the functioning of the car [17]. A vehicle referred to as “automatic” or “automated” is an automatic machine that does not have intelligent systems [17]. Another case is an autonomous vehicle. That kind of car, unlike an automatic vehicle, is equipped with intelligent systems based on which it will be able to make decisions about the route, appropriate traffic behaviour, and others [17]. An automatic car will only carry out commands [17].
Another issue related to autonomous vehicles is related to the terms “self-driving” and “driverless”. Self-driving is considered to describe all vehicles that are not as technologically advanced as the driverless type [17].
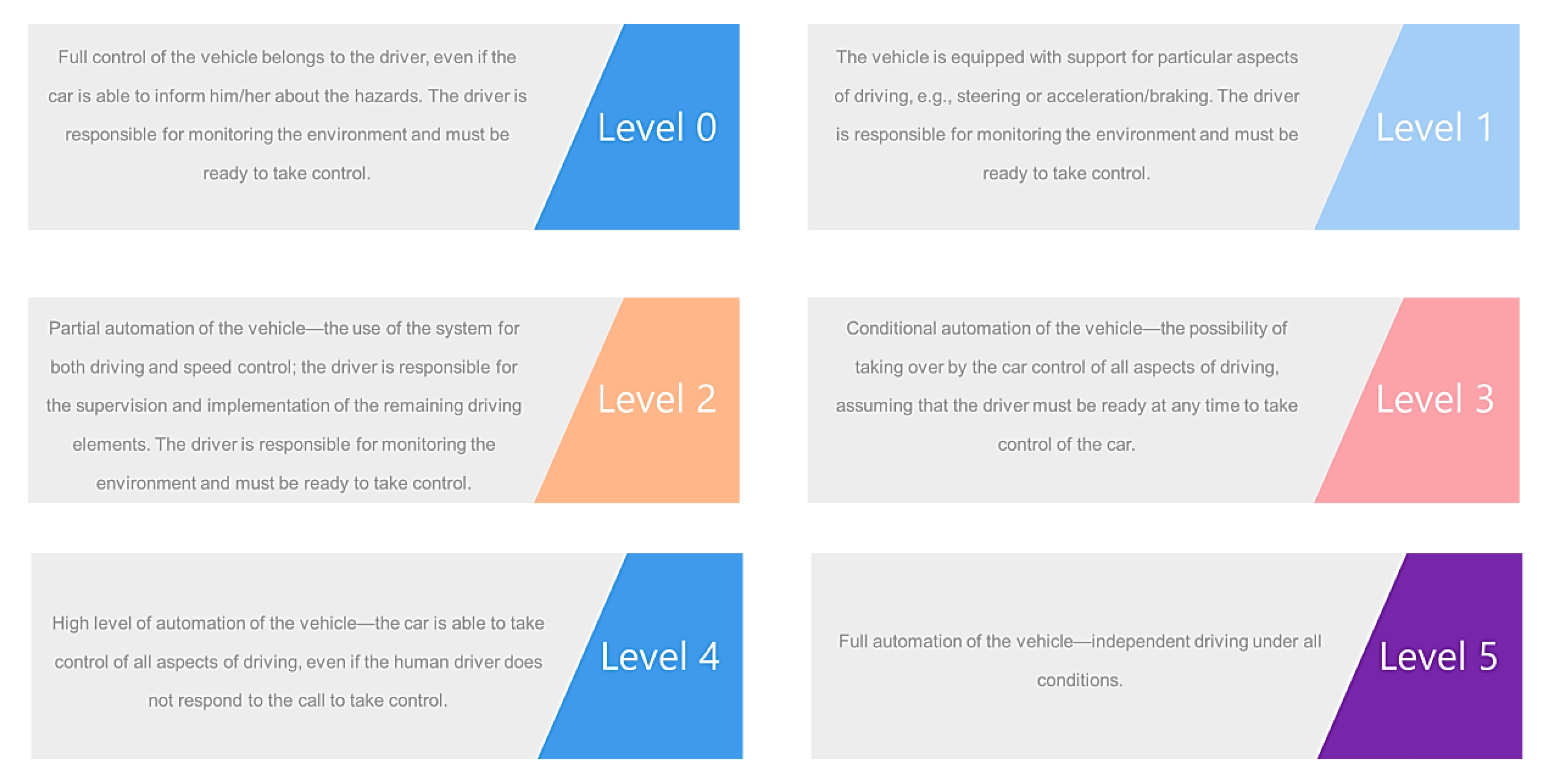
These concepts differ in the level of technology. The most popular classification of autonomous vehicles was presented by the National Highway Traffic Safety Administration (NHTSA) [18]. That classification is called an American point of view [18]. The classification includes a 5-point scale. It includes level 0 as well as four further levels of vehicle autonomy. The details of the classification are presented in Figure 2.
In the case of the European Union, two main definitions have been established for autonomous and automatic vehicles [19]. An automatic vehicle is considered to be a car equipped with technology that enables the driver to transfer some of their driving responsibilities to on-board systems [20]. In turn, an autonomous vehicle is defined as being a fully automated car equipped with technologies enabling the system to perform all functions related to driving without human intervention [20].
3. Autonomous Vehicles and Intelligent Transport Systems in Global Research
The growing market interest around autonomous cars that will be able to increase road safety and contribute to better organisation of urban transport systems is evident in international scientific research.
For example, a previous study [22] dealt with the subject of combining analytics and simulation methods to assess the impact of shared, autonomous electric vehicles on sustainable urban mobility. This study’s authors emphasise that there is a need to implement transport policies that will contain regulations for autonomous vehicles. They also indicate the real advantages of using this type of vehicle in car-sharing systems, for example, reducing the number of necessary fleets, which is associated with a reduction in costs for the operator.
In another work [23], the authors focused on the aspects related to assessing the impacts of shared autonomous vehicles on congestion and curb use. That research aimed to provide insights into the congestion effects of autonomous vehicles on urban traffic, focusing on the differences in behaviour from conventional cars, and to investigate which easy-to-implement solutions a municipality could apply to facilitate the new mix of traffic. The obtained results showed that autonomous cars could contribute to reducing congestion in cities, but this can happen in the case of vehicles available in organised networks. The authors emphasise that individual autonomous vehicles can contribute to increasing the phenomenon of congestion. Therefore, they suggest researching the use of autonomous vehicles in organised services, for example, in car-sharing systems.
What is more, other works [24,25] focused on topics related to a survey on driverless vehicles: from their diffusion to security features and the development of autonomous driving vehicles in tomorrow’s smart city mobility. That research focused on autonomous driving vehicles, with particular attention to the standard equipment currently in use and future improvements [24]. The articles also showed that the development of these vehicles will allow us to achieve better safety standards, less environmental pollution, and more significant social equity [25]. The obtained results allowed the authors to identify the main characteristics that tomorrow’s smart cities must hold to accommodate the new technologies introduced by autonomous vehicles [24].
In turn, another scientific work was dedicated to the issues of new urban planning challenges under emerging autonomous mobility, evaluating backcasting scenarios and policies [26]. The work showed that autonomous vehicles have the potential to transform urban systems. The authors emphasise, however, that their surveys showed that respondents were sceptical about the positive impacts of autonomous cars. This is due to their failure to see specific factors that would lead them to use this type of vehicle. Therefore, the authors suggest conducting research indicating the real factors associated with the use of autonomous vehicles in relation to classic vehicles. Such research will be able to support transport policies for the use of autonomous vehicles.
4. Methods
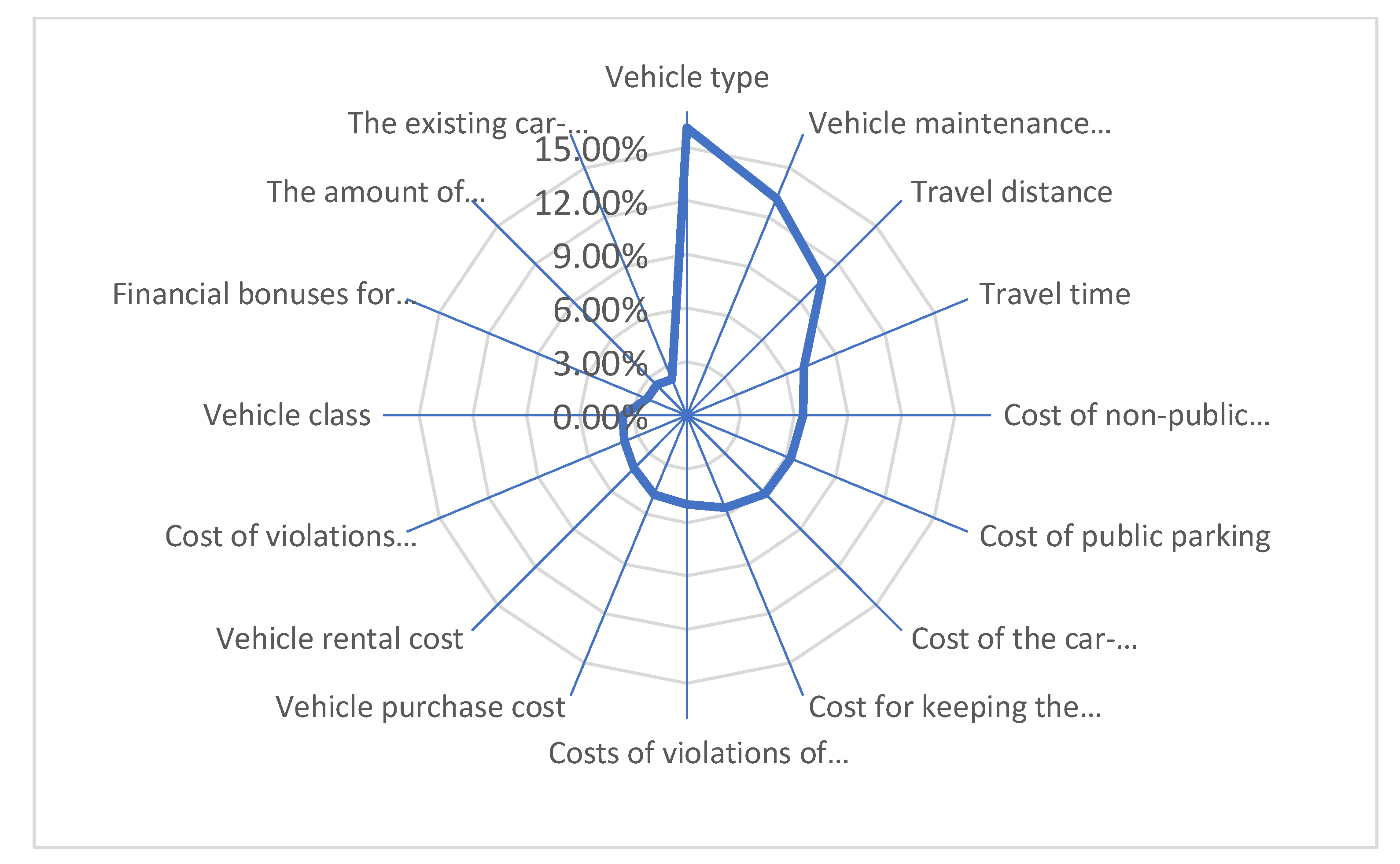
Economic aspects play a very important role in the case of shared mobility services. This role is all the greater when it comes to replacing classic vehicles with autonomous vehicles; however, in order to know exactly how the economy influences car-sharing, based on our own research, a survey was conducted to identify the economic aspects of car-sharing and autonomous car-sharing systems. We constructed a questionnaire in which the public could express their opinion on the costs of car-sharing and the costs of autonomous vehicles. The respondents’ task was to determine the most critical factors affecting the economic aspects of travel via various types of vehicles, including autonomous vehicles in urban transport systems. The study was addressed to people using car-sharing services and was made available via the Internet by various groups of people associated with car-sharing users. The survey was conducted among German users in January 2020. The survey received 208 responses. The research sample was representative. The population contains 82 million people, and a fraction size of 0.5 resulted in a maximum error of 7%. The confidence level was α = 0.95. The respondents’ responses were analysed and classified into the 16 main most recurring factors. The list of factors is presented in Table 1.
The most important factors from the point of view of the respondents are presented in Figure 4.
In order to analyse the selection of the right vehicle type for journeys in urban, intelligent transport systems due to economic factors, we proposed a research experiment. In the first step, we conducted heuristic research (Delphi method). The Delphi method is a structured communication technique or method, originally developed as a systematic, interactive forecasting method, which relies on a panel of experts [27,28,29,30]. Scientists around the world widely use the Delphi method because of its many strengths. The most important advantages of the method are the following [31,32]:
- Independence of expert opinions;
- The anonymity of spoken courts;
- Multistage proceedings;
- Finding agreement and summing up the opinions of competent persons;
- No dominants imposing their opinions on other people in the group;
- No reluctance to express one’s opinion;
- Results obtained based on the opinions of specialists.
The need to involve a large number of people;
- A time-consuming process;
- No direct exchange of views between experts;
- Difficulties in choosing the right people;
- Little involvement of experts if they are not familiar with the problem.
This method was used to obtain information from experts in the field of intelligent transport systems. The number of specialists who took part in the study was determined based on Equation (1) [33]:
where:
Smin—minimum number of experts;
—statistical significance, = 5%.
To obtain representativeness in the research sample, 33 experts in the field of urban transport systems were invited to the study. The group of experts consisted of scientists, local government officials involved in transport planning, and car-sharing system providers. The study was conducted in Germany in February 2020 during a meeting on the future of car-sharing services. The specialists’ task was to determine the most critical factors affecting the economic aspects of travel via various types of vehicles, including autonomous vehicles in urban transport systems. We provided the experts with the list of factors indicated by users of car-sharing systems in the questionnaire survey (Figure 4). The experts’ task was to indicate which of the factors selected in the survey would have the greatest impact on car-sharing services, including autonomous vehicles. In the first stage of the analysis, from the 16 factors previously mentioned by the respondents, the experts indicated 7. The results of the expert study are presented in Table 2.
In the next stage, the experts were asked to choose the three most important aspects out of the seven previously indicated. From among the factors, the experts identified three main aspects that should be considered in further analysis. Based on the results obtained, these three main aspects were taken into account in the analysis. Selecting three factors was necessary to perform the experiment presented later in this work. These factors were vehicle type, vehicle maintenance cost, and travel distance. For the purposes of this study, these factors were defined as follows:
- Vehicle type—the type of vehicle that can be used to make the journey in the urban transport system. Three types of vehicles were included: individual vehicle, car-sharing vehicle, and autonomous vehicle. The measure of fuel consumption determines the vehicle type, indicated as USD/km.
- Vehicle maintenance cost—the cost of maintaining a vehicle, which includes insurance, servicing, tire replacement, credit/leasing fees, and others, expressed in USD/km.
- Travel distance—takes into account the distance travelled by the vehicle in a given year. It is indicated as km/year.
The values of the three indicated factors were selected based on literature analysis [34,35,36,37,38].
The next step in the analysis was to plan a research experiment based on a polyselective experiment plan. This kind of preliminary plan is one of the solutions used in experimental simulations in exact sciences. The plan is called Hartley’s method (Hartley’s plan). Hartley’s plan, among other experimental plans, is the most convenient and useful for implementing experiments in technological fields. In practice, plans with the number of input factors xn where n < 3 are commonly used; in turn, plans with n > 3 are not very effective [39,40].
The basic principle of creating polyselective plans is the deliberate selection of combinations of input values (in the previously assumed range) in such a way that it is possible to obtain the required scientific information with a limited workload, i.e., a relatively small number of measurements [39,40].
The development of a specific experimental plan consists of determining the dependence of input values and their location relative to the central point (base point–zero point). There are two types of Hartley polyselective plans [39]. They are based on the dependence of the plan on its geometric structure: based on a hypercell or hypercube. In turn, preliminary plans developed for three input factors are based on a hypercube for which the coefficient is equal to 1 [40]. The ratio for the hypercula is 1.732 [39].
In Table 3, the values 0, 1, and α specify the maximum variability of a given factor. In the created plan of the experiment, the mathematical model is represented by a second-degree polynomial with Equation (2):
where:
—result factor;
—input factor;
—regression coefficients.
According to the theoretical part, the Hartley’s plan was created for three input variables. Based on the results presented in the Table 1, the input factor plan we used is presented in Table 4.
The significance of the coefficients was analysed using Student’s t-test. Coefficients deemed insignificant were rejected based on a significance level of 0.05.
5. Results
As a result of the simulation tests, changes in the value of travel costs were determined as a function of the selected input parameters. The values of travel costs were simulated based on literature data [34,35,36].
Table 5 shows the results of the experimental tests we carried out.
Based on the data from Table 5. as well as Equation (3) for the three input factors, we developed further formulas and charts describing travel costs in the context of the type of vehicle, vehicle maintenance costs, and travel distance. Equation (3) for the three input factors was defined as
where:
—results factor;
—input parameters;
Detailed definitions of the individual input parameters:
—regression coefficients.
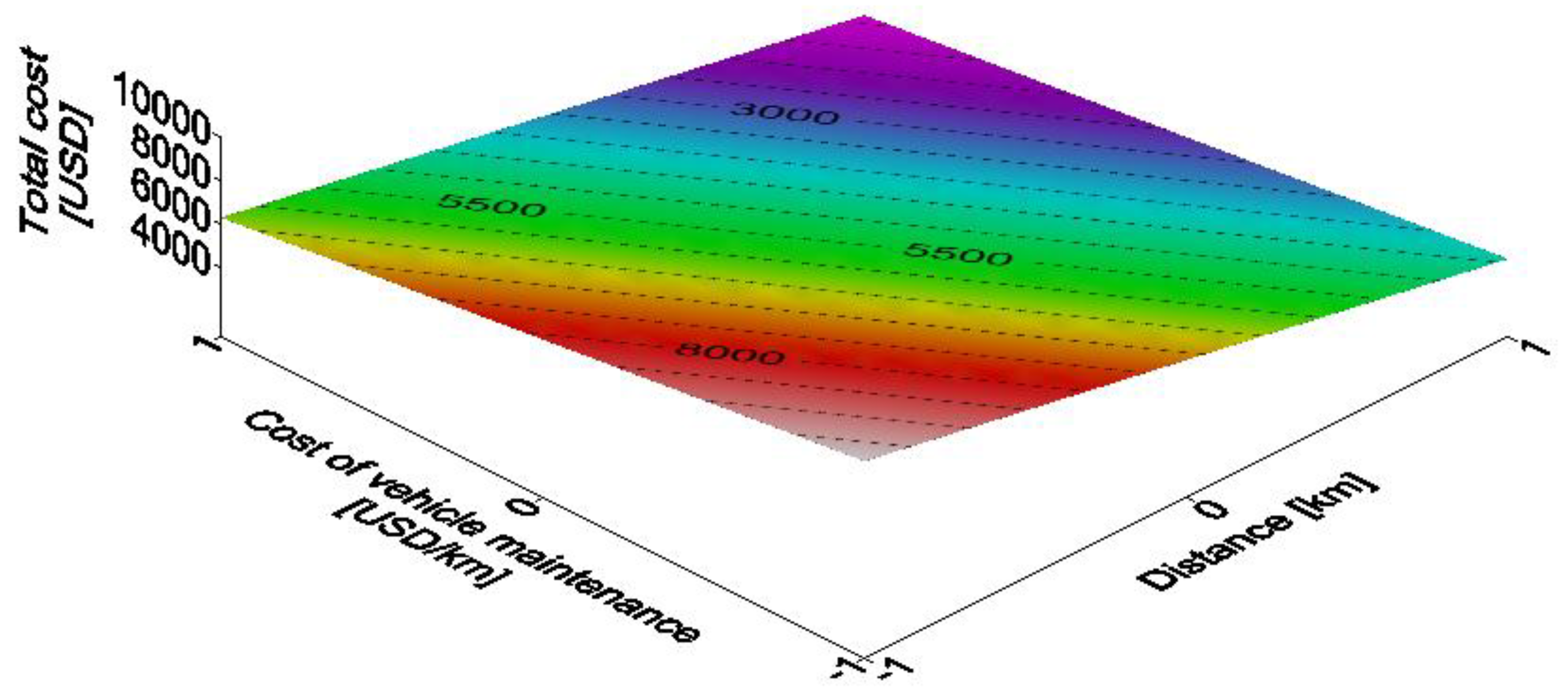
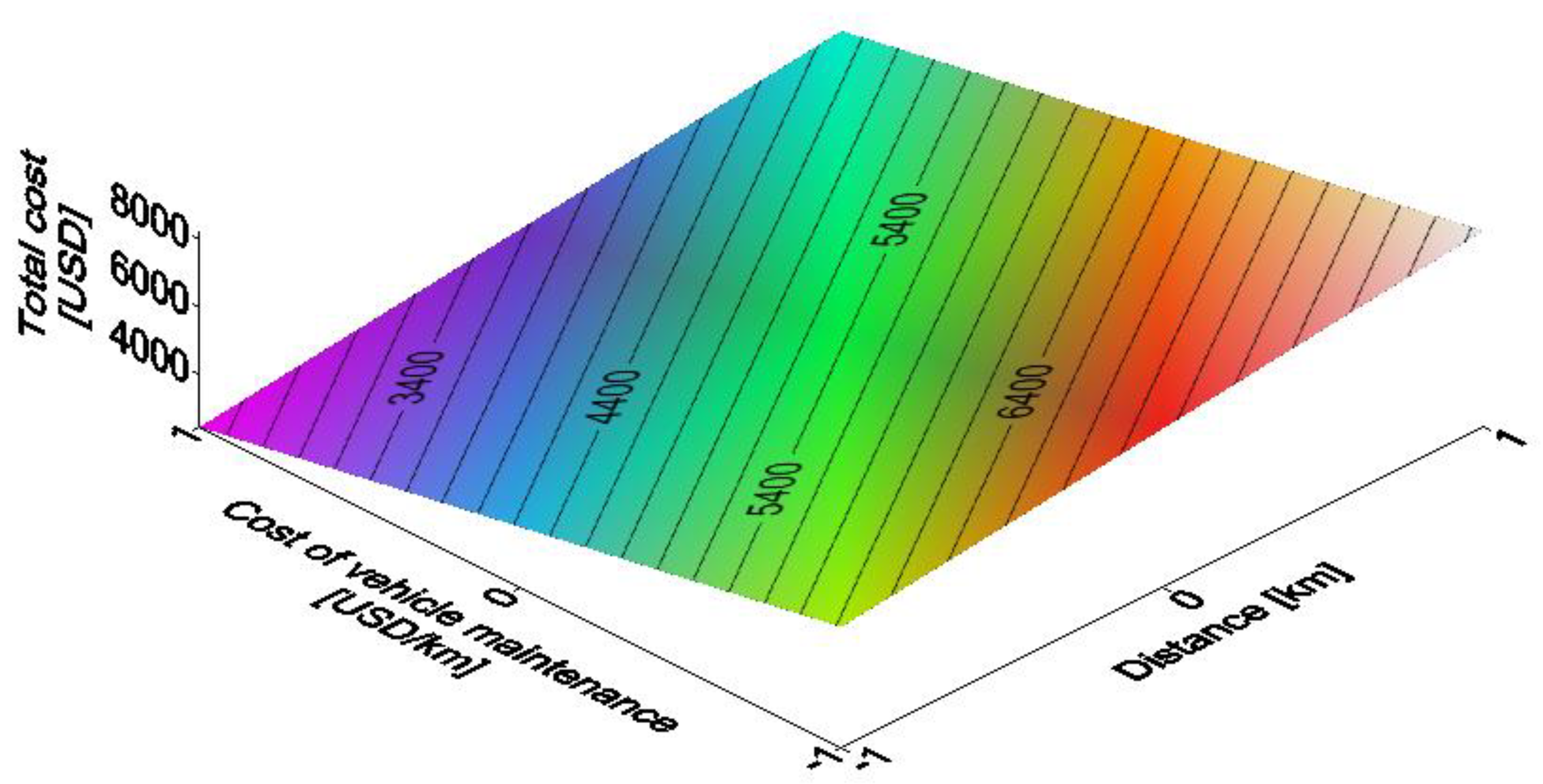
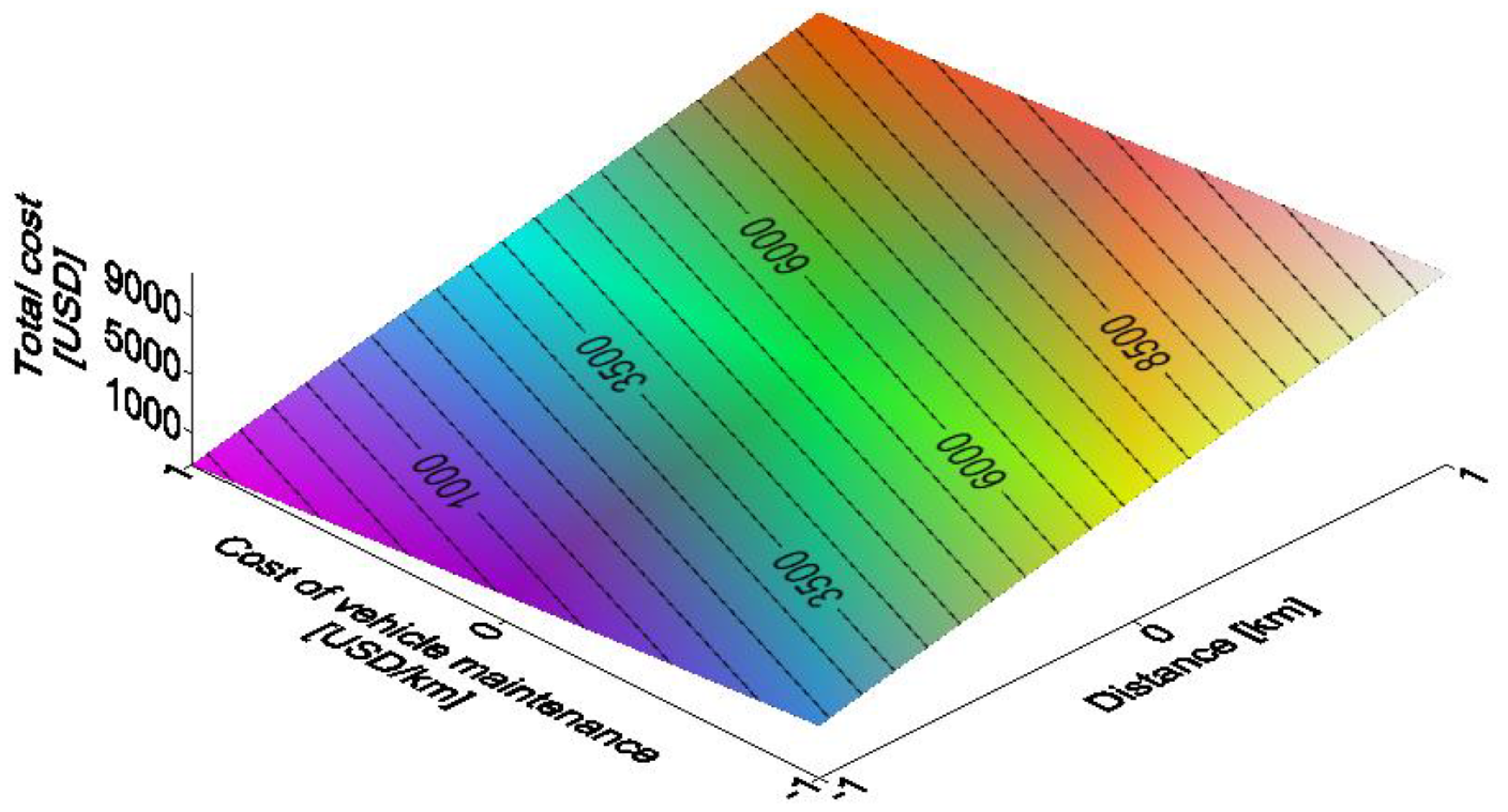
Details of the simulation values for the total travel cost are shown in Figure 5, Figure 6, Figure 7, Figure 8, Figure 9, Figure 10, Figure 11, Figure 12 and Figure 13. Figure 5, Figure 6 and Figure 7 show the impact of vehicle maintenance costs (x2) and distance (x3) on the total cost of travel, assuming a constant value for the vehicle type (x1). It was found that the factors of vehicle maintenance costs and distance had a linear effect on the total cost of travel in all simulated x1 cases. Variation of the vehicle type had the most significant impact on the total cost of travel. Autonomous vehicles showed the most considerable variability (Figure 7).
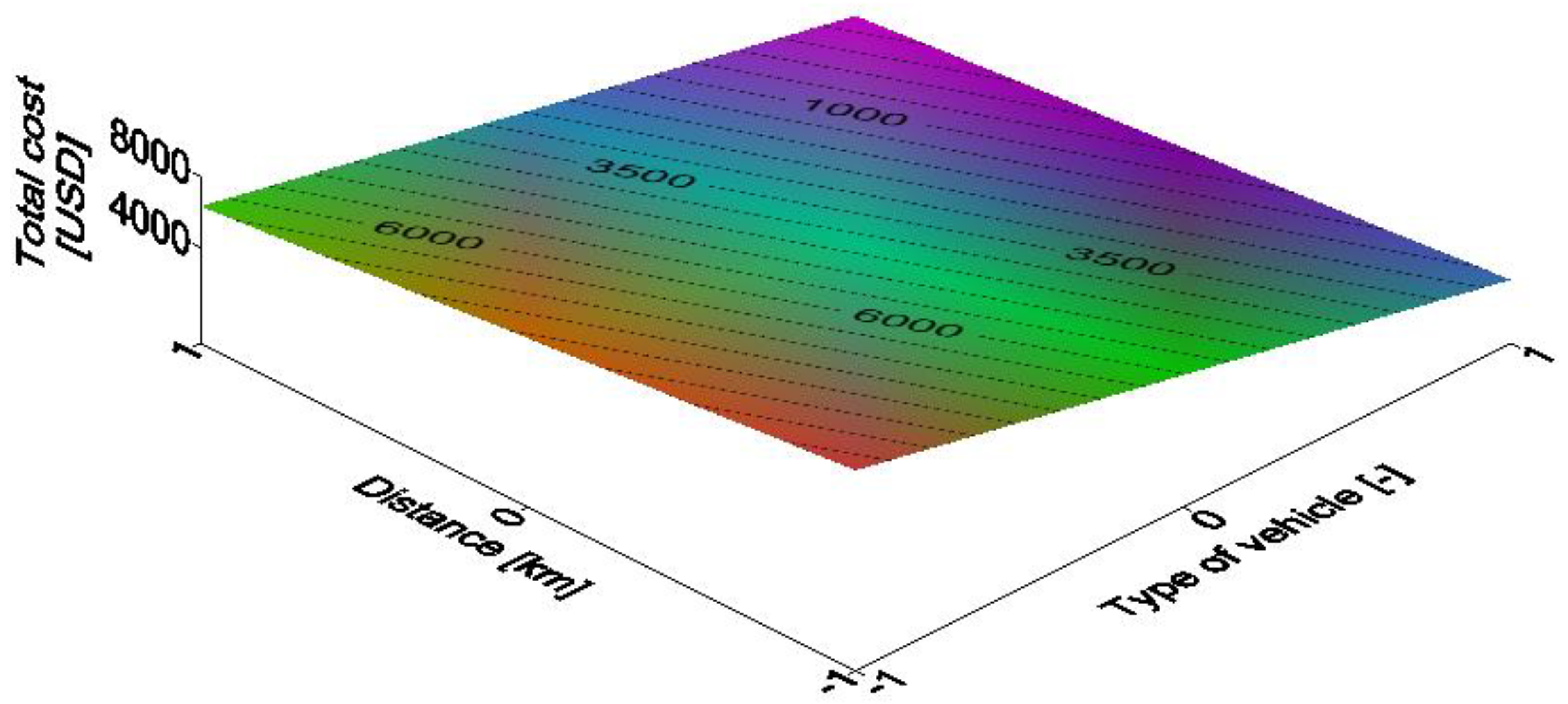
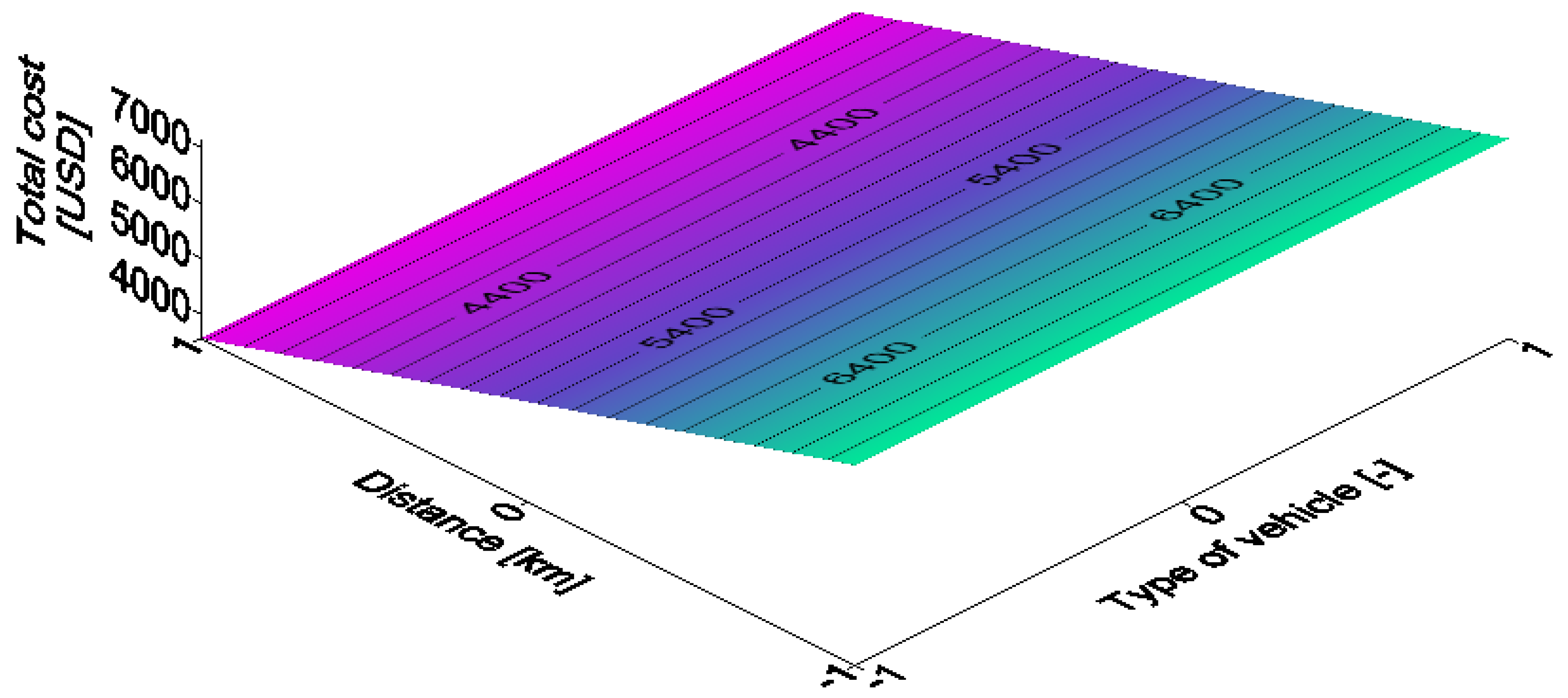
Figure 8, Figure 9 and Figure 10 show the impact of the vehicle type (x1) and distance (x3) on the total cost of travel, with constant vehicle maintenance costs (x2). It was found that the vehicle type and distance had a linear effect on the total cost of travel in all simulated x2 cases. It is worth noting that in the case of x2 = 0, regardless of the type of vehicle, the total cost of travel depends only on the distance travelled.
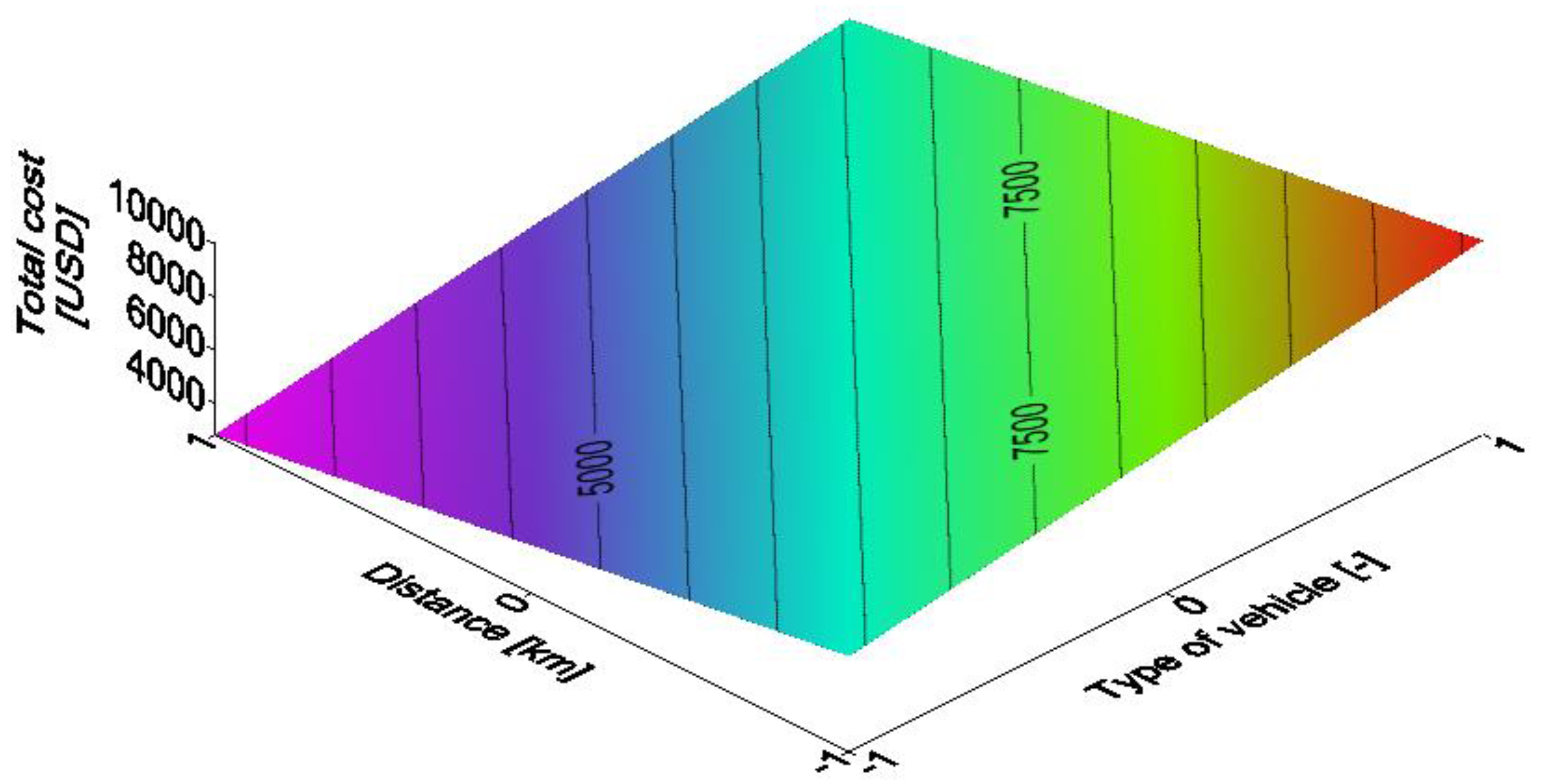
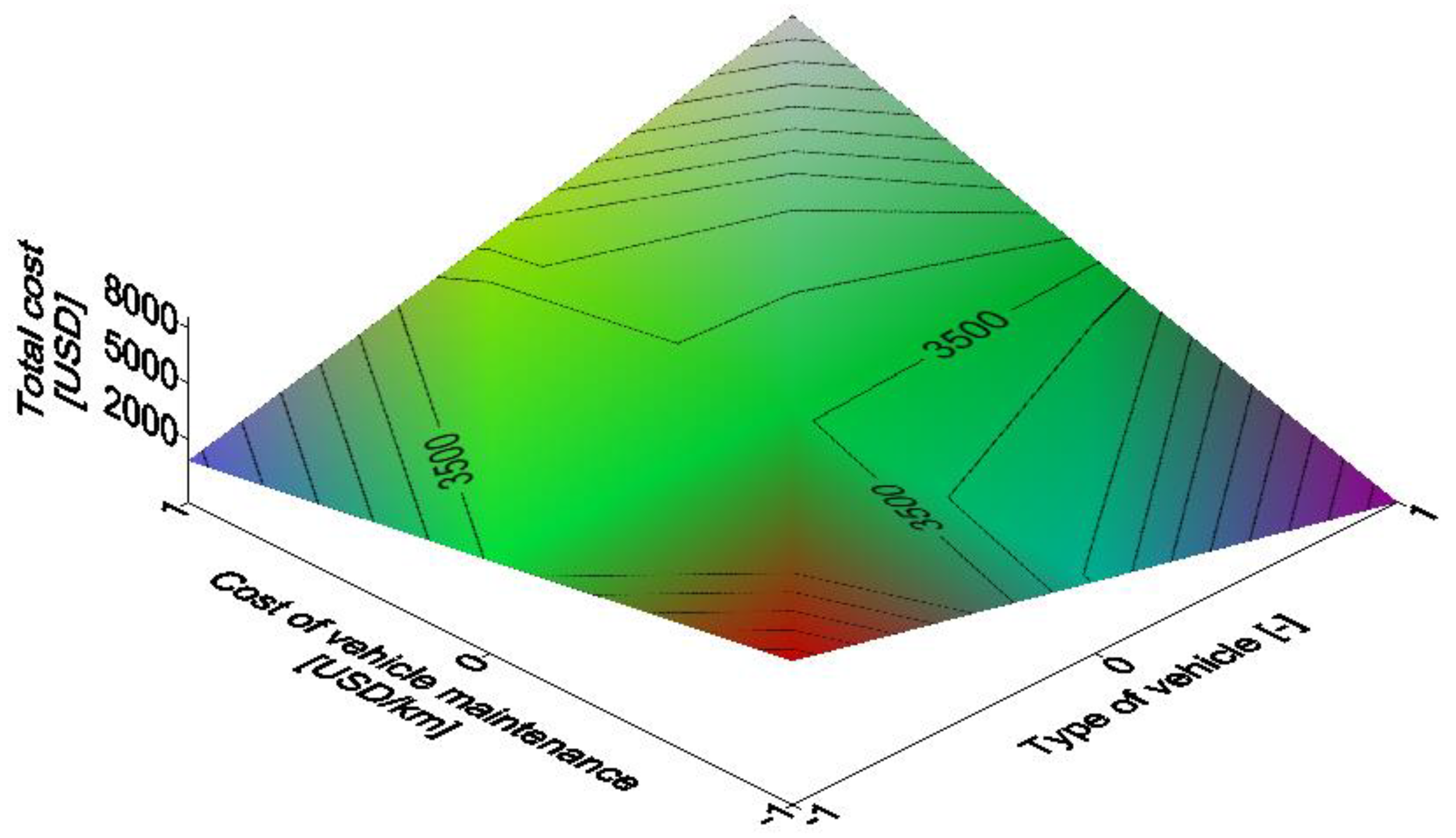
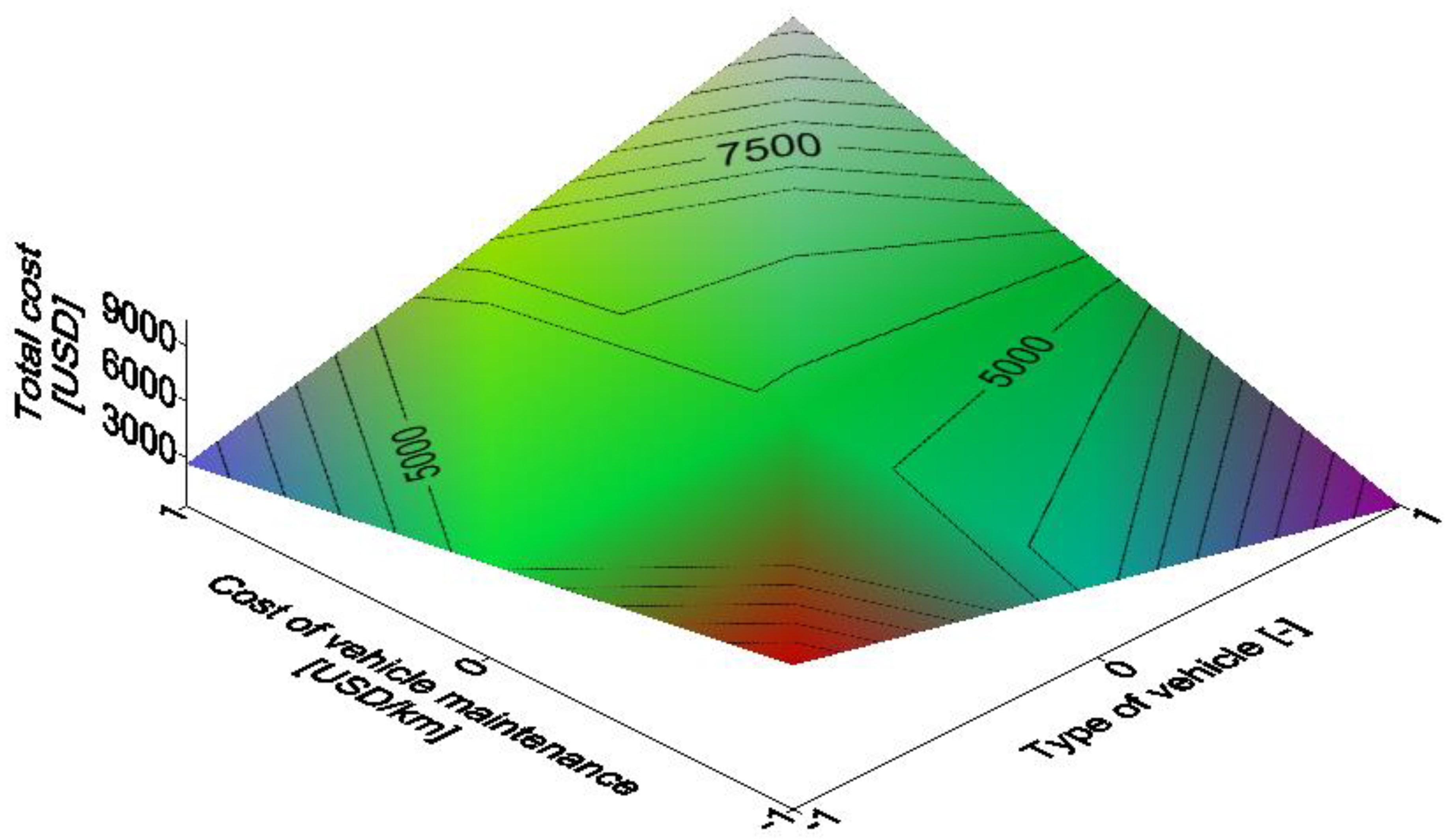
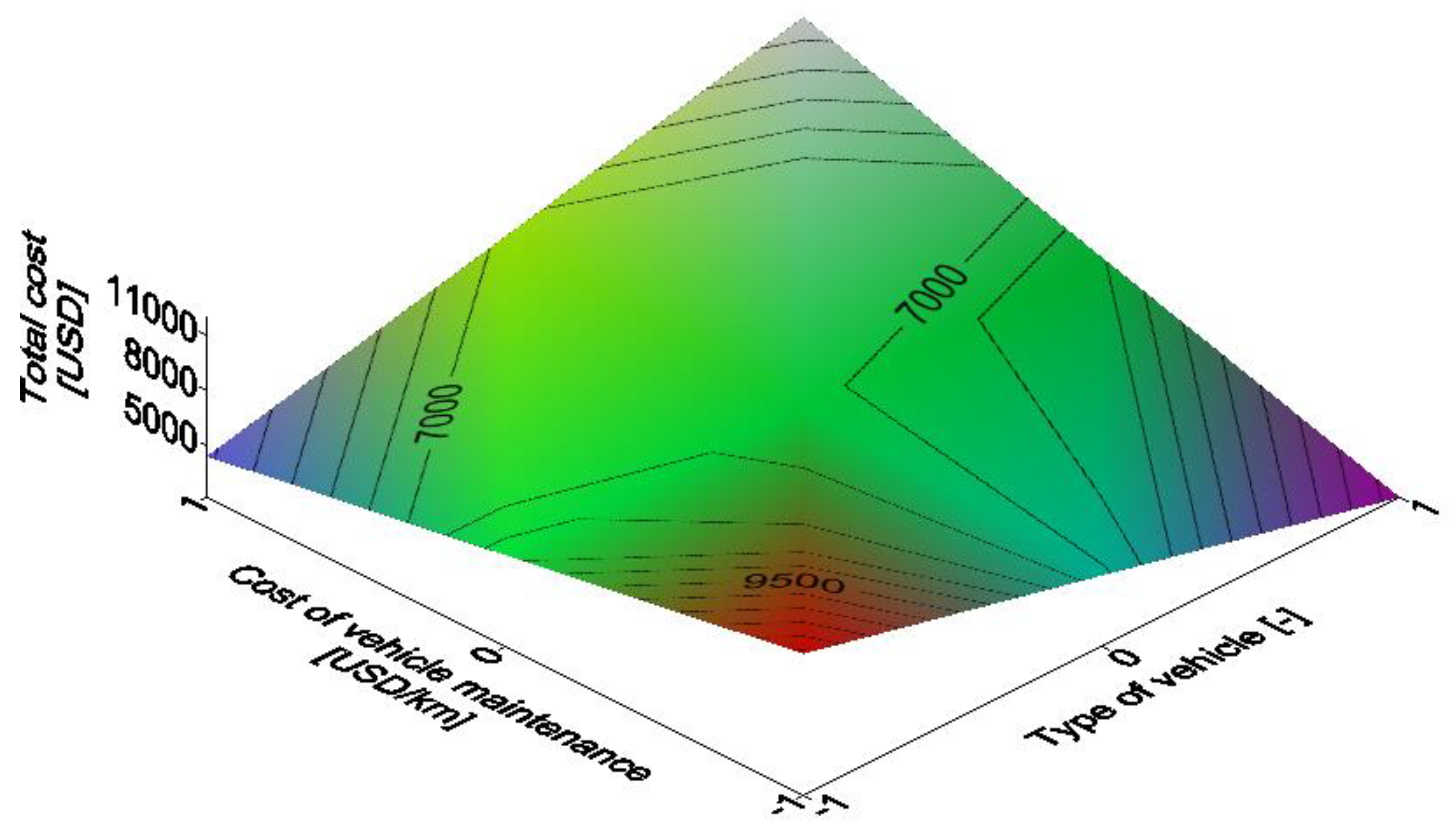
Figure 11, Figure 12 and Figure 13 show the impact of type (x1) and vehicle maintenance cost (x2) on the total cost of travel, with a constant value of distance covered (x3). It was found that the vehicle type and distance had a parabolic effect on the total cost of travel in all simulated x3 cases. In the case of a fixed mileage value (x3), it can be stated that the lowest values of total travel cost are for the cases of autonomous vehicle and individual vehicle travel costs (x1 = 1 ∧ x2 = −1) and for an individual vehicle together with the costs of an autonomous vehicle (x1 = −1 ∧ x2 = 1). The lowest variability was shown by vehicles from a car-sharing system together with maintenance costs of vehicles from a car-sharing system (x1 = 0 ∧ x2 = 0).
6. Discussion and Conclusions
The simulations and tests carried out in this article indicate the importance of the input factors in the form of vehicle type, distance, and car maintenance costs (x1, x2, x3) in the final value of the cost of the journey. The simulations carried out present the existing problem of the use of autonomous vehicles in urban transport systems. The research conducted based on the experiment plan allowed us to determine the impact of individual input factors and to determine the trend of changes in the generated travel cost.
Our research indicates that the greatest profitability and least volatility is currently demonstrated by vehicles from car-sharing systems. The high cost of maintaining an autonomous vehicle disqualifies autonomous vehicles from frequent use in urban transport systems. As an indication of urban transport systems, one may take the situation when the cost of maintaining an autonomous vehicle is at the level of the cost of maintaining an individual vehicle.
Our analysis indicates that the use of autonomous vehicles in the case of shared mobility systems would be economically unjustified. However, many operators around the world are testing the implementation of autonomous vehicles in urban transport systems as a ride-hailing service.
An interesting conclusion resulting from the analysis is that the use of vehicles from car-sharing systems is more economical than having an individual vehicle, which is in line with current trends in sustainable urban mobility. However, because the best solution turned out to be a vehicle from a car-sharing system, a guide for how the creators of autonomous vehicles should proceed is to attempt to construct vehicles in such a way that they can meet the specific requirements set for cars from car-sharing systems. Furthermore, autonomous vehicles have appropriate equipment and durability for use in car-sharing systems with relatively low maintenance costs [41]. Meeting such requirements would make it possible to use autonomous vehicles in urban transport systems and could realistically contribute to reducing transport congestion or shortage of parking spaces.
The added value of this article is the results of questionnaire research and the results of expert research conducted herein. The compilation of factors in the results of this research could be used by other scientists when carrying out analyses of car-sharing systems, autonomous vehicles, and private cars.
For a more advanced comparison, other aspects that are related to autonomous vehicles will be necessary, such as efficiency of electricity consumption or savings on insurance or medical costs due to reduced traffic accidents. However, currently, those kinds of data are not available due to the low percentage of autonomous vehicles in the automotive market. In subsequent works, we plan to further analyse travel costs, taking into account a more significant number of input factors and detailed features related to autonomous vehicles [42,43] to simulate the use of autonomous vehicles in more detail in the conditions of the urban transport system, as soon as more detailed data are available.
Author Contributions
Conceptualisation, A.K. and K.T.; methodology, A.K.; software, A.K.; validation, A.K.; formal analysis, K.T.; investigation, K.T.; resources, K.T.; data curation, A.K.; writing—original draft preparation, K.T. and A.K.; writing—review and editing, K.T. and A.K.; visualisation, A.K.; supervision, A.K. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Conflicts of Interest
The authors declare no conflict of interest.
Featured Application
This method of fleet selection for use in intelligent transport systems could possibly be applied by car-sharing providers, individual car owners, or vehicle manufacturers who are considering replacing their existing fleet.
References
- Cervero, R. City CarShare: First-year travel demand impacts. Transp. Res. Rec. J. Transp. Res. Board 2003, 1839, 159–166. [Google Scholar] [CrossRef]
- Cervero, R.; Golub, A.; Nee, B. City Car Share: Longer-term travel demand and car ownership impacts. Transp. Res. Rec. J. Transp. Res. Board 2007, 1992, 70–80. [Google Scholar] [CrossRef]
- Cervero, R.; Tsai, Y. City CarShare in San Francisco, California: Second-year travel demand and car ownership impacts. Transp. Res. Rec. J. Transp. Res. Board 2004, 1887, 117–127. [Google Scholar] [CrossRef]
- Britton, E. Carsharing 2000 Report—Sustainable Transport’s Missing Link; The Journal of World Transport Policy & Practice, The Commons and Ecoplan: Paris, France, 2000; Available online: https://networkdispatches.files.wordpress.com/2013/10/carshare-2000-final-report.pdf (accessed on 20 June 2020).
- Turoń, K.; Kubik, A.; Chen, F. Operational Aspects of Electric Vehicles from Car-Sharing Systems. Energies 2019, 12, 4614. [Google Scholar] [CrossRef] [Green Version]
- Ciari, F.; Bock, B.; Balmer, M. Modeling station-based and free-floating car-sharing demand: A test case study for Berlin, Germany. In Emerging and Innovative Public Transport and Technologies; Transportation Research Board of the National Academies: Washington, DC, USA, 2014. [Google Scholar]
- Ferrero, F.; Perboli, G.; Rosano, M.; Vesco, A. Car-sharing services: An annotated review. Sustain. Cities Soc. 2018, 37, 501–518. [Google Scholar] [CrossRef]
- Nourinejad, M.; Roorda, M.J. Carsharing operations policies: A comparison between one-way and two-way systems, transportation. Transportation 2015, 42, 497–518. [Google Scholar] [CrossRef]
- Shaheen, S.; Cohen, A. Carsharing and Personal Vehicle Services: Worldwide Market Developments and Emerging Trends. Int. J. Sustain. Transp. 2013, 7, 5–34. [Google Scholar] [CrossRef]
- Rodenbach, J.; Jeffrey, M.; Chicco, A.; Diana, M. Car Sharing in Europe: A Multidimensional Classification and Inventory, Deliverable D2.1. 2018. Available online: http://stars-h2020.eu/wp-content/uploads/2019/06/STARS-D2.1.pdf (accessed on 15 June 2020).
- Movmi Portal, Car-Sharing Market Growth in 2019. Available online: https://movmi.net/carsharing-market-growth-2019/ (accessed on 15 June 2020).
- Schaefers, T. Exploring car-sharing usage motives: A hierarchical means-end chain analysis. Transp. Res. Part A Policy Pract. 2013, 47, 69–77. [Google Scholar] [CrossRef]
- Turoń, K.; Kubik, A.; Łazarz, B.; Czech, P.; Stanik, Z. Car-sharing in the context of car operation. In Proceedings of the International Automotive Conference (KONMOT 2018), Krakow, Poland, 13–14 September 2018; Institute of Physics Publishing: Bristol, UK, 2018; pp. 1–10. [Google Scholar]
- Kröger, F. Automated Driving in Its Social, Historical and Cultural Contexts. In Autonomous Driving. Technical, Legal and Social Aspects; Markus, M., Christian, G., Barbara, L., Hermann, W., Eds.; Springer: Cham, Switzerland; Berlin, Germany, 2016; pp. 41–68. [Google Scholar]
- Moras, J.; Cherfaoui, V.; Bonnifait, P. A lidar perception scheme for intelligent vehicle navigation. In Proceedings of the 11th International Conference on Control Automation Robotics & Vision, Singapore, 7–10 December 2010; pp. 1809–1814. [Google Scholar]
- Howard, A. Real-Time Stereo Visual Odometry for Autonomous Ground Vehicles. In Proceedings of the International Conference on Intelligent Robots and Systems (2008 IEEE/RSJ), Nice, France, 22–26 September 2008; pp. 3946–3952. [Google Scholar]
- Levinson, D. On the Differences between Autonomous, Automated, Self-Driving, and Driverless Cars. Available online: https://transportist.org/2017/06/29/on-the-differences-between-autonomous-automated-self-driving-and-driverless-cars/ (accessed on 15 June 2020).
- National Highway Traffic Safety Administration (NHTSA). Automated Vehicles for Safety. Available online: https://www.nhtsa.gov/technology-innovation/automated-vehicles-safety (accessed on 15 June 2020).
- European Union Briefing: Automated Vehicles in the EU. Available online: http://www.europarl.europa.eu/RegData/etudes/BRIE/2016/573902/EPRS_BRI(2016)573902_EN.pdf (accessed on 15 June 2020).
- International Society of Automotive Engineers. Automated Driving. Available online: https://www.sae.org/misc/pdfs/automated_driving.pdf (accessed on 15 June 2020).
- Verband der Automobilindustrie (VDA). Automation from Driver Assistance Systems to Automated Driving. Available online: https://webcache.googleusercontent.com/search?q=cache:rB5YVdzyLdwJ:https://www.vda.de/en/topics/innovation-and-technology/automated-driving/automated-driving.html+&cd=2&hl=pl&ct=clnk&gl=pl (accessed on 15 June 2020).
- Dlugosch, O.; Brandt, T.; Neumann, D. Combining analytics and simulation methods to assess the impact of shared, autonomous electric vehicles on sustainable urban mobility. Inf. Manag. 2020, 103285. [Google Scholar] [CrossRef]
- Overtoom, I.; Gorreia, G.; Huang, Y.; Verbraeck, A. Assessing the impacts of shared autonomous vehicles on congestion and curb use: A traffic simulation study in The Hague, Netherlands. Int. J. Transp. Sci. Technol. 2020, in press. [Google Scholar] [CrossRef]
- Arena, F.; Pau, G.; Collotta, M. A survey on driverless vehicles: From their diffusion to security features. J. Internet Serv. Inf. Secur. 2018, 8, 1–19. [Google Scholar]
- Arena, F.; Ticali, D. The development of autonomous driving vehicles in tomorrow’s smart cities mobility. AIP Conf. Proc. 2018, 2040, 140007. [Google Scholar]
- Nogués, S.; González-González, E.; Cordera, R. New urban planning challenges under emerging autonomous mobility: Evaluating backcasting scenarios and policies through an expert survey. Land Use Policy 2020, 95, 104652. [Google Scholar] [CrossRef]
- Dalkey, N.; Helmer, O. An Experimental Application of the Delphi Method to the use of experts. Manag. Sci. 1963, 9, 458–467. [Google Scholar] [CrossRef]
- Sackman, H. An Experiment in Probabilistic Forecasting. In Delphi Assessment: Expert Opinion, Forecasting and Group Process; R-1283-PR; The Rand Corporation: Santa Monica, CA, USA, 1972. [Google Scholar]
- Linstone, H.A.; Turoff, M. The Delphi Method: Techniques and Applications, Reading, Mass; Addison-Wesley: Los Angeles, CA, USA, 1975. [Google Scholar]
- Brown, B.B. An earlier paper published by RAND. In Delphi Process: A Methodology Used for the Elicitation of Opinions of Experts; Document No: P-3925; RAND Corporation: Santa Monica, CA, USA, 1968; pp. 1–15. [Google Scholar]
- Fink-Hafner, D.; Dagen, T.; Dousak, M.; Novak, M.; Hafner-Fink, M. Delphi Method: Strengths and Weaknesses. Metodoloski Zv. 2019, 16, 1–19. [Google Scholar]
- Banno, M.; Tsujimoto, Y.; Kataoka, Y. The majority of reporting guidelines are not developed with the Delphi method: A systematic review of reporting guidelines. J. Clin. Epidemiol. 2020, 124, 50–57. [Google Scholar] [CrossRef]
- Mishin, V.M. Research of Control Systems; Textbook for Universities; Unity-Dana: Moscow, Russia, 2003.
- Litman, T. Autonomous Vehicles Implementation Predictions. Implications for Transport Planning, Victoria Transport Policy Institute. Available online: https://www.vtpi.org/avip.pdf (accessed on 15 June 2020).
- AAA (Annual Reports), Your Driving Costs, American Automobile Association. Available online: https://publicaffairsresources.aaa.biz/YDC/html5/index.html (accessed on 15 June 2020).
- Fleming, K.; Singer, M. Energy Implications of Current Travel and the Adoption of Automated Vehicles. Available online: https://www.nrel.gov/docs/fy19osti/72675.pdf (accessed on 15 June 2020).
- González-González, E.; Nogués, S.; Stead, D. Parking Futures: Preparing European Cities for the Advent of Automated Vehicles. Land Use Policy 2020, 90, 104010. [Google Scholar] [CrossRef]
- Ortegon-Sanchez, A.; Tyler, N. Constructing a Vision for an ‘Ideal’ Future City: A Conceptual Model for Transformative Urban Planning. Transform. Urban Plan. 2016, 13, 6–17. [Google Scholar] [CrossRef] [Green Version]
- Polański, Z. Planning Experiences in Technology; State Scientific Publishers: Warszawa, Poland, 1984. [Google Scholar]
- Górecka, R. Theory and Technique of Experiment; Cracow University of Technology Publishing House: Kraków, Poland, 1996. [Google Scholar]
- Turoń, K.; Czech, P.; Tóth, J. Safety and Security Aspects in Shared Mobility Systems. Sci. J. Sil. Univ. Technol. Ser. Transp. 2019, 104, 169–175. [Google Scholar] [CrossRef]
- Czech, P.; Turoń, K.; Barcik, J. Autonomous Vehicles: Basic Issues. Sci. J. Sil. Univ. Technol. Ser. Transp. 2018, 100, 15–22. [Google Scholar] [CrossRef]
- Hadryś, D.; Bąkowski, H.; Stanik, Z.; Kubik, A. Analysis of Shaft Wear in Turbocharges of Automotive Vehicles. Transp. Probl. 2019, 14, 85–95. [Google Scholar] [CrossRef] [Green Version]
Figure 1.
Diversity of car-sharing systems.

Figure 2.
Autonomous driving levels—National Highway Traffic Safety Administration (NHTSA) classification.
Figure 2.
Autonomous driving levels—National Highway Traffic Safety Administration (NHTSA) classification.

Figure 3.
Autonomous driving levels—the International Society of Automotive Engineers (ISAE) classification.
Figure 3.
Autonomous driving levels—the International Society of Automotive Engineers (ISAE) classification.

Figure 4.
List and weights of the most recurring critical factors affecting the economic aspects of travel via various types of vehicles, including autonomous vehicles in urban transport systems—study results.
Figure 4.
List and weights of the most recurring critical factors affecting the economic aspects of travel via various types of vehicles, including autonomous vehicles in urban transport systems—study results.

Figure 5.
The total cost of travel by individual vehicles in relation to the cost of maintaining the vehicle and the distance travelled.
Figure 5.
The total cost of travel by individual vehicles in relation to the cost of maintaining the vehicle and the distance travelled.

Figure 6.
The total cost of travel by vehicles from a car-sharing system in relation to the cost of maintaining the vehicle and the distance travelled.
Figure 6.
The total cost of travel by vehicles from a car-sharing system in relation to the cost of maintaining the vehicle and the distance travelled.

Figure 7.
The total cost of travel by autonomous vehicles in relation to the cost of maintaining the vehicle and the distance travelled.
Figure 7.
The total cost of travel by autonomous vehicles in relation to the cost of maintaining the vehicle and the distance travelled.

Figure 8.
The total cost of travelling by vehicle concerning the distance travelled and the type of vehicle, assuming constant cost of maintaining an individual vehicle.
Figure 8.
The total cost of travelling by vehicle concerning the distance travelled and the type of vehicle, assuming constant cost of maintaining an individual vehicle.

Figure 9.
The total cost of travelling by vehicle concerning the distance travelled and the type of vehicle, assuming constant cost of maintaining a vehicle from a car-sharing system.
Figure 9.
The total cost of travelling by vehicle concerning the distance travelled and the type of vehicle, assuming constant cost of maintaining a vehicle from a car-sharing system.

Figure 10.
The total cost of travelling by vehicle concerning the distance travelled and the type of vehicle, assuming fixed cost of maintaining an autonomous vehicle.
Figure 10.
The total cost of travelling by vehicle concerning the distance travelled and the type of vehicle, assuming fixed cost of maintaining an autonomous vehicle.

Figure 11.
The total cost of travelling 10,000 km depending on the type of vehicle and vehicle maintenance costs.
Figure 11.
The total cost of travelling 10,000 km depending on the type of vehicle and vehicle maintenance costs.

Figure 12.
The total cost of travelling 15,000 km depending on the type of vehicle and vehicle maintenance costs.
Figure 12.
The total cost of travelling 15,000 km depending on the type of vehicle and vehicle maintenance costs.

Figure 13.
The total cost of travelling 20,000 km depending on the type of vehicle and vehicle maintenance costs.
Figure 13.
The total cost of travelling 20,000 km depending on the type of vehicle and vehicle maintenance costs.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
List of the most recurring critical factors affecting the economic aspects of travel via various types of vehicles, including autonomous vehicles in urban transport systems—study results.
Table 1.
List of the most recurring critical factors affecting the economic aspects of travel via various types of vehicles, including autonomous vehicles in urban transport systems—study results.
| No. | Factor |
|---|---|
| 1 | Vehicle type |
| 2 | Vehicle maintenance cost |
| 3 | Travel distance |
| 4 | Travel time |
| 5 | Cost of non-public car parks |
| 6 | Cost of public parking |
| 7 | Cost of the car-sharing service package |
| 8 | Cost for keeping the vehicle for yourself for a specified time |
| 9 | Costs of violations of the car-sharingperator regulations |
| 10 | Vehicle purchase cost |
| 11 | Vehicle rental cost |
| 12 | Cost of violations (e.g., improper use, parking)—fines |
| 13 | Vehicle class |
| 14 | Financial bonuses for using car-sharing (e.g., 5 min for free ) |
| 15 | The amount of additional fees (e.g., departure outside the zone) |
| 16 | The existing car-sharing system in the city |
Table 2.
Importance of the factors affecting the economic aspects of travel via various types of vehicles—study results.
Table 2.
Importance of the factors affecting the economic aspects of travel via various types of vehicles—study results.
| No. | Factor | Value | Standard Deviation |
|---|---|---|---|
| 1 | travel distance | 18% | 0.7% |
| 2 | travel time | 12% | 1.2% |
| 3 | vehicle purchase cost | 8% | 1.1% |
| 4 | vehicle maintenance cost | 22% | 1.5% |
| 5 | vehicle rental cost | 7% | 1.0% |
| 6 | vehicle type | 27% | 0.6% |
| 7 | vehicle class | 6% | 0.8% |
Table 3.
The experiment plan for three input factors.
| Sample No. | Input Factors on the Standard Scale | ||
|---|---|---|---|
| x1 | x2 | x3 | |
| 1 | −1 | −1 | 1 |
| 2 | 1 | −1 | −1 |
| 3 | −1 | 1 | −1 |
| 4 | 1 | 1 | 1 |
| 5 | −1 | 0 | 0 |
| 6 | 1 | 0 | 0 |
| 7 | 0 | −1 | 0 |
| 8 | 0 | 1 | 0 |
| 9 | 0 | 0 | 1 |
| 10 | 0 | 0 | −1 |
| 11 | 0 | 0 | 0 |
Table 4.
The three-input-factor experiment plan used in the research.
| Sample No. | Input Factors on the Standard Scale | Input Factors on the Real Scale | ||||
|---|---|---|---|---|---|---|
| x1 | x2 | x3 | x1 Vehicle Type [USD/km] | x2 Vehicle Maintenance Cost [USD/km] | x3 Travel Distance [km] | |
| 1 | −1 | −1 | 1 | 0.311 | 0.062 | 20,000 |
| 2 | 1 | −1 | −1 | 0.249 | 0.062 | 10,000 |
| 3 | −1 | 1 | −1 | 0.311 | 0.211 | 10,000 |
| 4 | 1 | 1 | 1 | 0.249 | 0.211 | 20,000 |
| 5 | −1 | 0 | 0 | 0.311 | 0.124 | 15,000 |
| 6 | 1 | 0 | 0 | 0.249 | 0.124 | 15,000 |
| 7 | 0 | −1 | 0 | 0.233 | 0.062 | 15,000 |
| 8 | 0 | 1 | 0 | 0.233 | 0.211 | 15,000 |
| 9 | 0 | 0 | 1 | 0.233 | 0.124 | 20,000 |
| 10 | 0 | 0 | −1 | 0.233 | 0.124 | 10,000 |
| 11 | 0 | 0 | 0 | 0.233 | 0.124 | 15,000 |
Table 5.
The results of the conducted experiment.
| Sample No. | Input Factors on the Real Scale | Results | ||
|---|---|---|---|---|
| x1 Vehicle Type [USD/km] | x2 Vehicle Maintenance Cost [USD/km] | x3 Travel Distance [km] | Total Cost [USD] | |
| 1 | 0.311 | 0.062 | 20,000 | 7456.45 |
| 2 | 0.249 | 0.062 | 10,000 | 3106.86 |
| 3 | 0.311 | 0.211 | 10,000 | 5219.52 |
| 4 | 0.249 | 0.211 | 20,000 | 9196.29 |
| 5 | 0.311 | 0.124 | 15,000 | 6524.40 |
| 6 | 0.249 | 0.124 | 15,000 | 5592.34 |
| 7 | 0.233 | 0.062 | 15,000 | 4427.27 |
| 8 | 0.233 | 0.211 | 15,000 | 6664.21 |
| 9 | 0.233 | 0.124 | 20,000 | 7145.77 |
| 10 | 0.233 | 0.124 | 10,000 | 3572.88 |
| 11 | 0.233 | 0.124 | 15,000 | 5359.33 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Turoń, K.; Kubik, A. Economic Aspects of Driving Various Types of Vehicles in Intelligent Urban Transport Systems, Including Car-Sharing Services and Autonomous Vehicles. Appl. Sci. 2020, 10, 5580. https://doi.org/10.3390/app10165580
AMA Style
Turoń K, Kubik A. Economic Aspects of Driving Various Types of Vehicles in Intelligent Urban Transport Systems, Including Car-Sharing Services and Autonomous Vehicles. Applied Sciences. 2020; 10(16):5580. https://doi.org/10.3390/app10165580
Chicago/Turabian StyleTuroń, Katarzyna, and Andrzej Kubik. 2020. "Economic Aspects of Driving Various Types of Vehicles in Intelligent Urban Transport Systems, Including Car-Sharing Services and Autonomous Vehicles" Applied Sciences 10, no. 16: 5580. https://doi.org/10.3390/app10165580
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.