1. Introduction
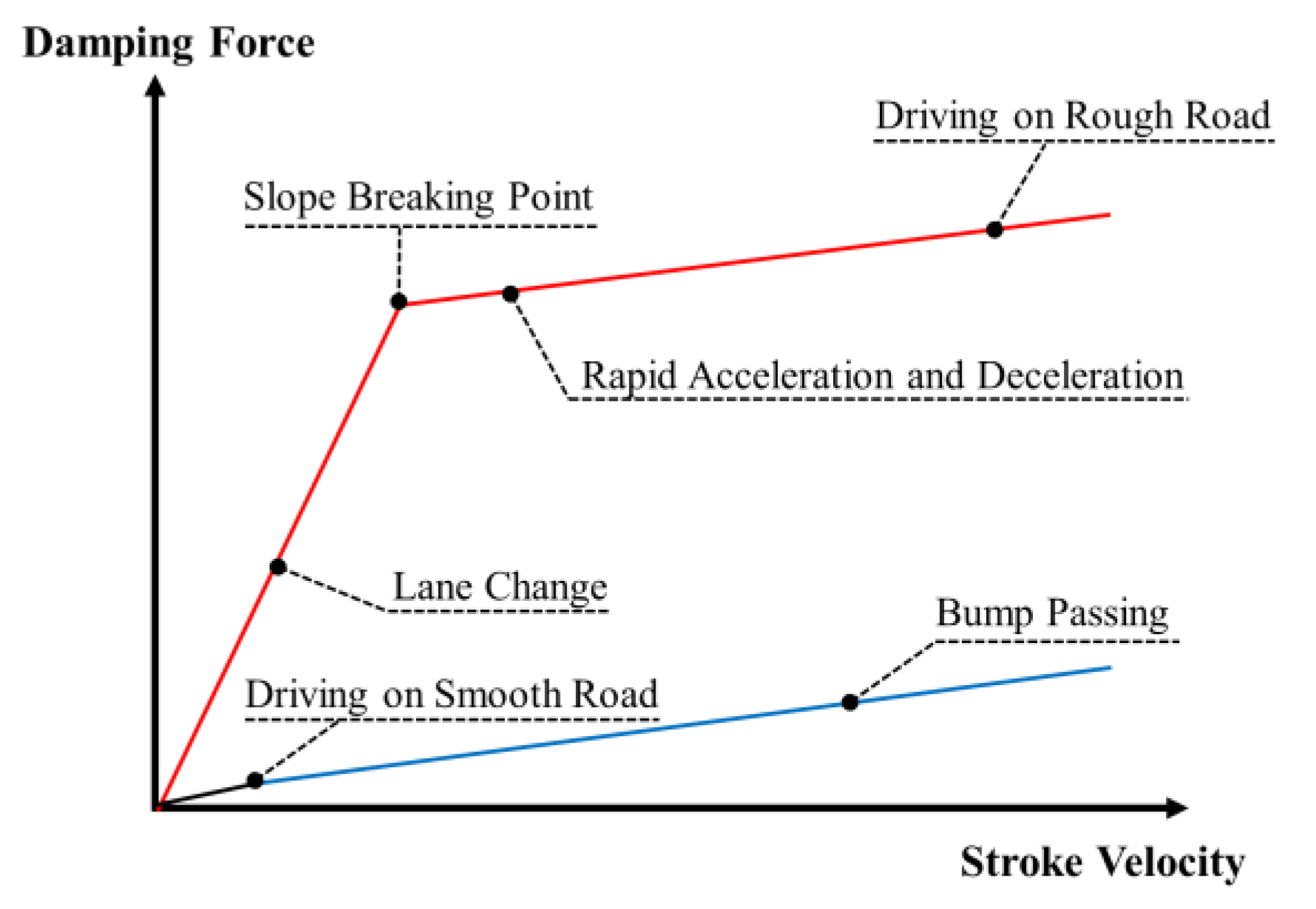
The main functions of the vehicle suspension system include the supporting vehicle’s static weight, isolating the body from road disturbances for good ride quality and keeping safe road holding and handling on various driving conditions for high steering stability. In general, the suspension system consists of an elastic element of the spring and viscous element of the damper (or shock absorber). Since the damper plays a crucial role for the ride comfort and road holding, the suspension system is classified depending upon the type of the damper—passive, semi-active, and active suspension system. In the case of the passive damper, the damping characteristics are determined by the combination of the disc springs in piston valve. To minimize the trade-offs between the ride comfort and road holding, optimal damping characteristics of the passive damper are achieved based on numerous road tests with the conditions as shown in
Figure 1 [
1,
2]. It is seen from this figure that there is a slope breaking point (SBP) at a specific stroke velocity (or piston velocity) where the damping coefficient drastically changes and different damping characteristics are realized before and after SBP. It is known that to accomplish both good ride comfort and road holding properties, high damping coefficient is required in low stroke velocity range, while low damping coefficient is required in high stroke velocity range. Since the passive damper has a limitation to satisfy this trade-off requirement, active dampers have been proposed to overcome the limitation [
3,
4,
5,
6,
7,
8]. Unlike the passive damper, excellent driving performances with active dampers can be ensured by controlling the damping force according to various external conditions. However, despite the performance enhancement, active damper requires large power, many sensors and sophisticated control algorithm to avoid the instability. Thus, recently, the semi-active dampers are actively developing in several different ways. One attractive way to devise the semi-active damper is to use a magnetorheological (MR) fluid whose rheological properties can be quickly controlled by external magnetic field [
9,
10,
11,
12,
13,
14,
15,
16,
17,
18,
19]. Some of semi-active dampers utilizing MR fluid (MR damper in short) are practically implemented on several vehicle suspension systems and commercially available [
20].
MR dampers have been designed using different flow motion of MR fluid [
21,
22,
23]. In fact, there are four operating flow motions—flow mode, shear mode, squeeze mode, and pinch mode. In the flow mode, MR fluid flows between two fixed plates to create the field-dependent pressure drop. In the shear mode, the shear stress is occurred from the flow motion between the moving plate and the fixed plate. In the squeeze mode, the force is generated in a direction parallel to the magnetic field. The pinch mode can be achieved by utilizing the non-magnetic spacer that separates the magnetic poles. Thus, the generated force depends on the magnetic field intensity which can control the flow rate of MR fluid. So far, numerous MR dampers have been developed based on flow mode and shear modes for the vehicle suspension system. However, the research on the pinch mode-based MR damper is relatively rare [
24,
25].
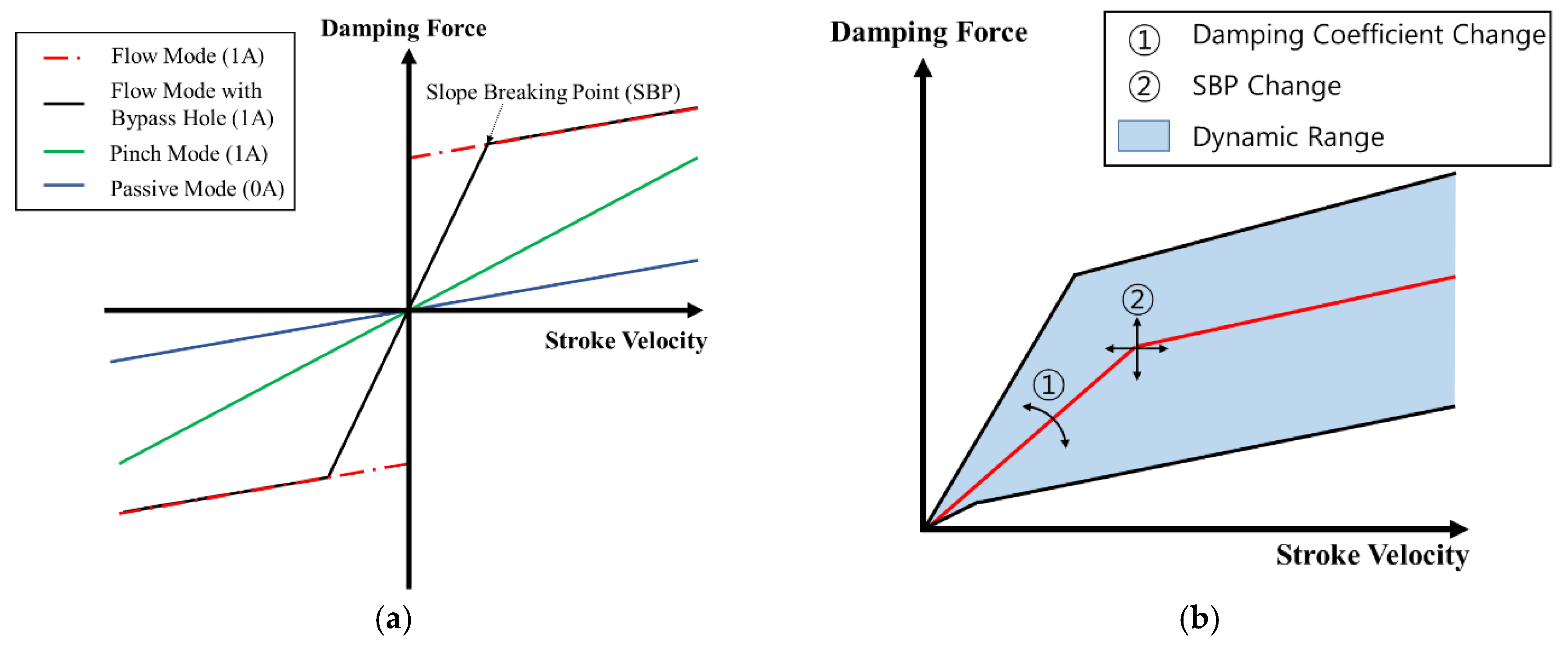
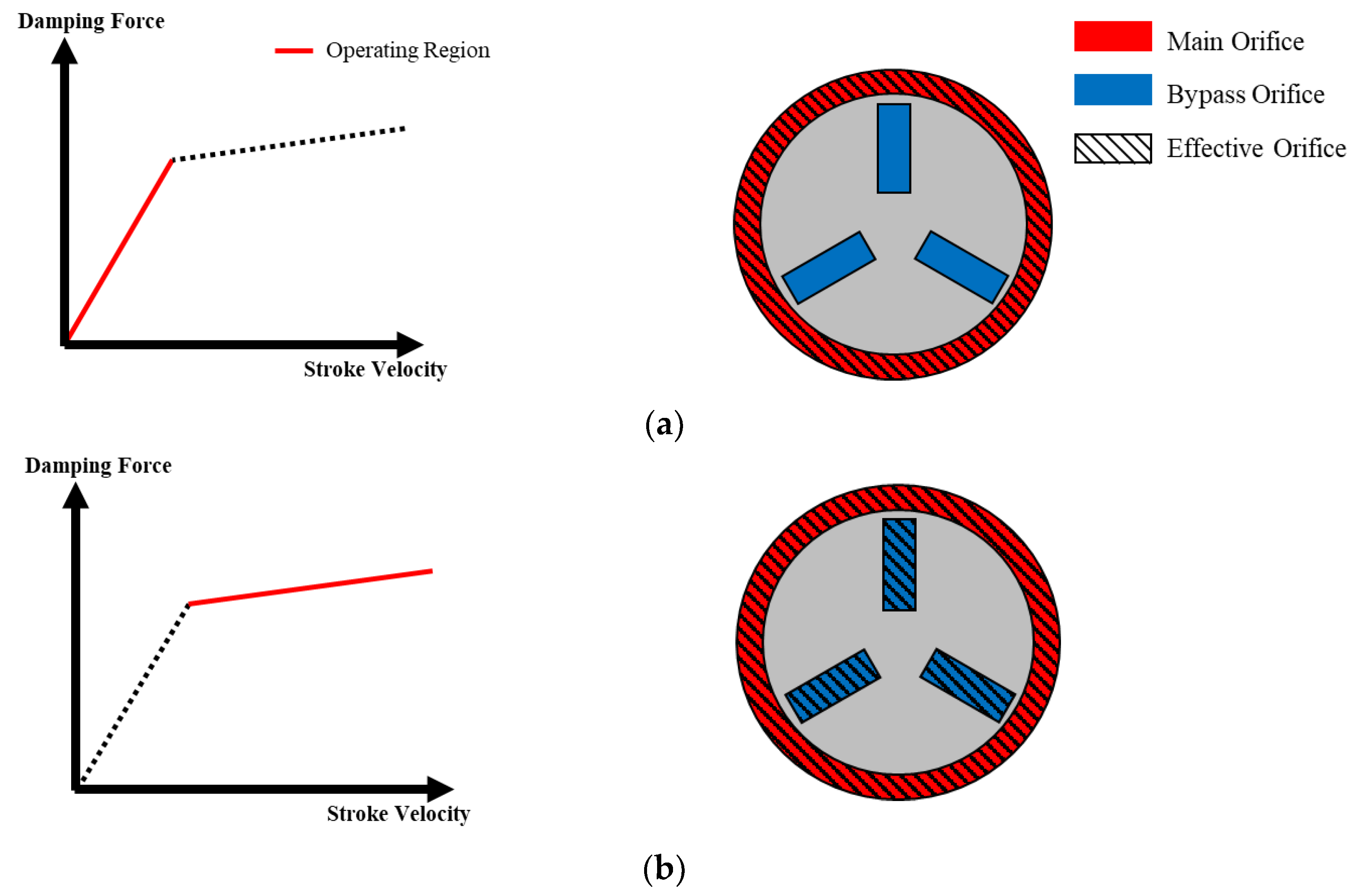
Figure 2a shows the damping characteristics of three different MR dampers—flow mode, flow mode with bypass hole, and pinch mode. In the flow and shear mode MR damper, the desired damping force is obtained by controlling the yield stress of MR fluid. To avoid the discontinuity at low (almost zero) stroke velocity of the flow mode, the bypass holes are added to the flow-mode MR damper. This type is more practicable than the flow mode only [
26]. However, even though the damping coefficient can be changed according to the stroke velocity range, there is a limit to control the desired SBP. As observed from the characteristic of the flow mode, it is difficult to obtain a high damping coefficient at high speed. Moreover, it is hard to obtain a high damping coefficient at the low speed from the pinch-mode MR damper only.
Consequently, the technical originality of this work is to propose a novel type of MR damper which can control both the damping coefficient and the SBP to achieve desired damping characteristics at high and low speeds.
Figure 2b shows the damping characteristics of the proposed MR damper. Unlike conventional MR dampers operated by the flow mode only or pinch mode only, the proposed MR damper has a specific pole shape function (PSF) and hence the damping coefficient can be easily controlled by varying the magnetic-effective area of the main orifice. In addition, the SBP can be tuned by opening or closing the bypass orifices. In this paper, MRD-PSF stand for the proposed MR damper with PSF in the effective pole. To demonstrate the effectiveness of the proposed damper, a mathematical modeling to achieve the damping force is carried out, followed by the analysis of the damping force characteristics as functions of the input current (or magnetic field intensity) and piston velocity. In addition, it is shown that three different desired damping forces are realized by changing both the coefficient slope, SBP, and the input current. The subsequent section introduces the configuration of MRD-PSF and the principles of the damping coefficient change and the SBP change, followed by the mathematical modeling in
Section 3. In this section, several models are provided to analyze the flow motions through the main orifice and bypass orifice. In
Section 4, the field-dependent damping characteristics of MRD-PSF are evaluated by presenting control method of the damping coefficient and the SBP to achieve the desired damping force. The last section concludes the main results achieved form the proposed new MR damper and a brief remark for future work.
3. Damping Force Modeling
To find the relationship between the stroke velocity and the damping force of MR damper, the behavior of MR fluid flowing through orifices is analyzed. To model the behavior of MR fluid, assumptions and simplifications are made as follows: (i) the flow is a fully developed laminar flow, (ii) the fluid is incompressible, (iii) the parallel plate model is used, and iv) one-dimensional analysis is considered. In general, the behavior of MR fluid is assumed to follow the Bingham model in which a total stress of MR fluid is composed of the field-dependent yield stress and the field-independent viscous stress. If the total stress is higher than the field-dependent yield stress, the flow is governed by the Bingham equation [
21]:
where,
is the magnetic field intensity,
is the shear rate, and
is the viscosity of MR fluid. If the total stress is lower than the field-dependent yield stress, the fluid behaves like viscoelastic material:
where,
is the complex modulus and
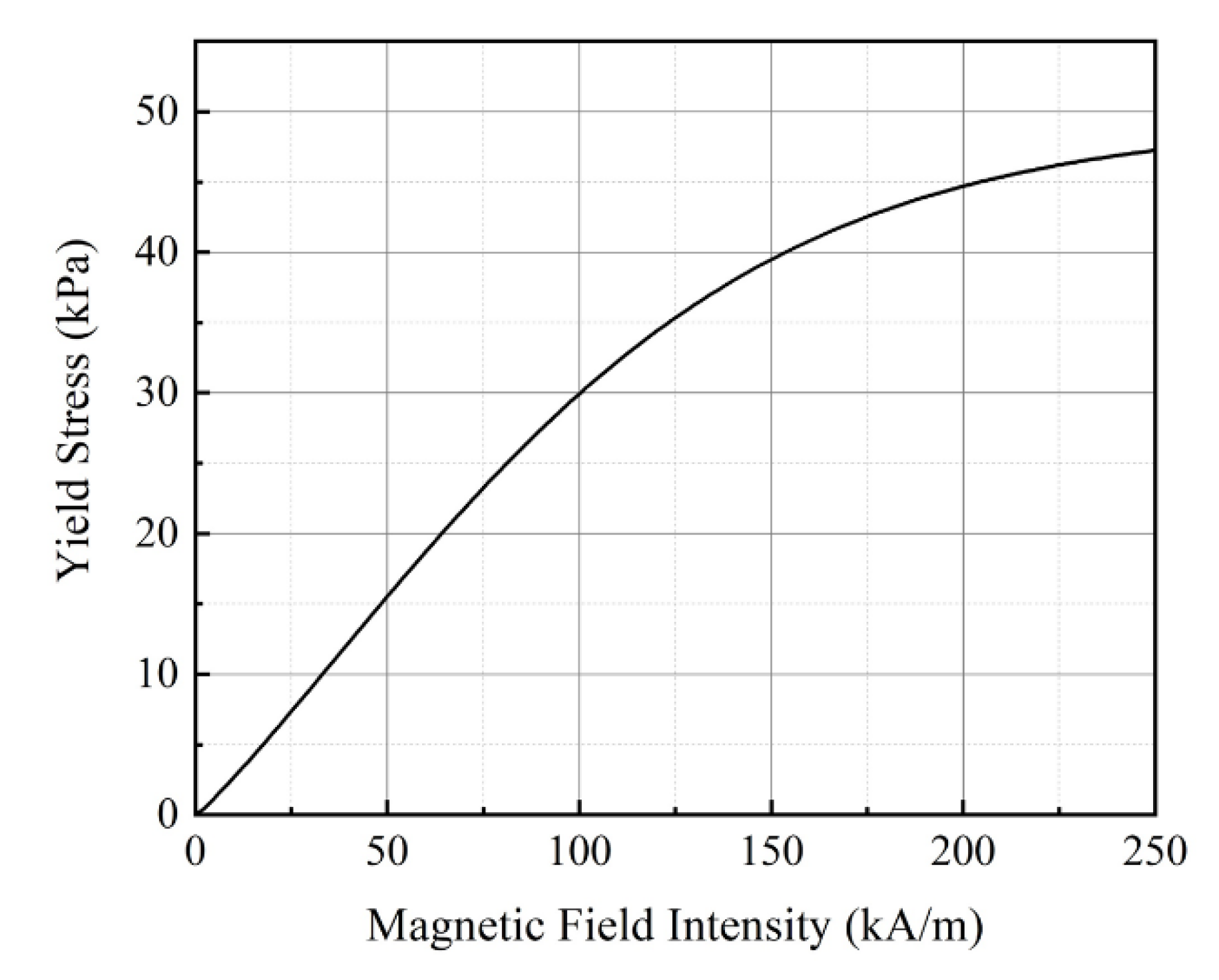
is the shear strain. In this study, one of commercial MR fluids (Lord Corp., MRF-132DG [
27]) is used as working fluid.
Figure 7 shows the magnetic property of MR fluid adopted in this work. From the plot, the field-dependent yield stress
can be expressed using the fourth-order polynomial equation as follows.
The above equation is obtained by the curve fitting of the measured data shown in
Figure 7. In the previous works, various methods of non-dimensional analysis have been studied for mathematical modeling of MR damper [
28,
29,
30,
31,
32]. It is noted that the proposed MR damper is also analyzed based on the non-dimensional manner. It is noted that since the proposed MRD-PSF consists several flow modes the total damping force should be calculated by considering the flow motion of the parallel plate, the flow motion of the main orifice and bypass orifices
3.1. Flow Motion of the Parallel Plate Model
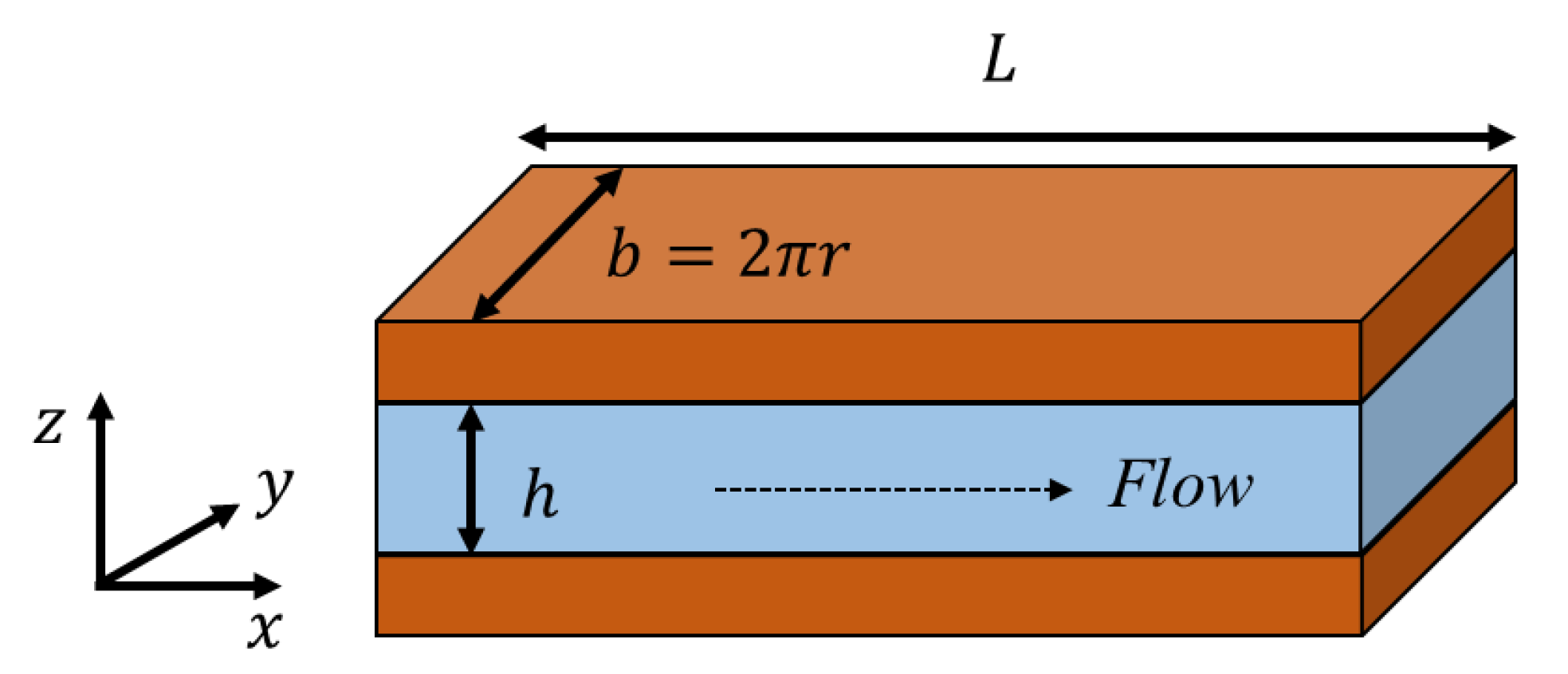
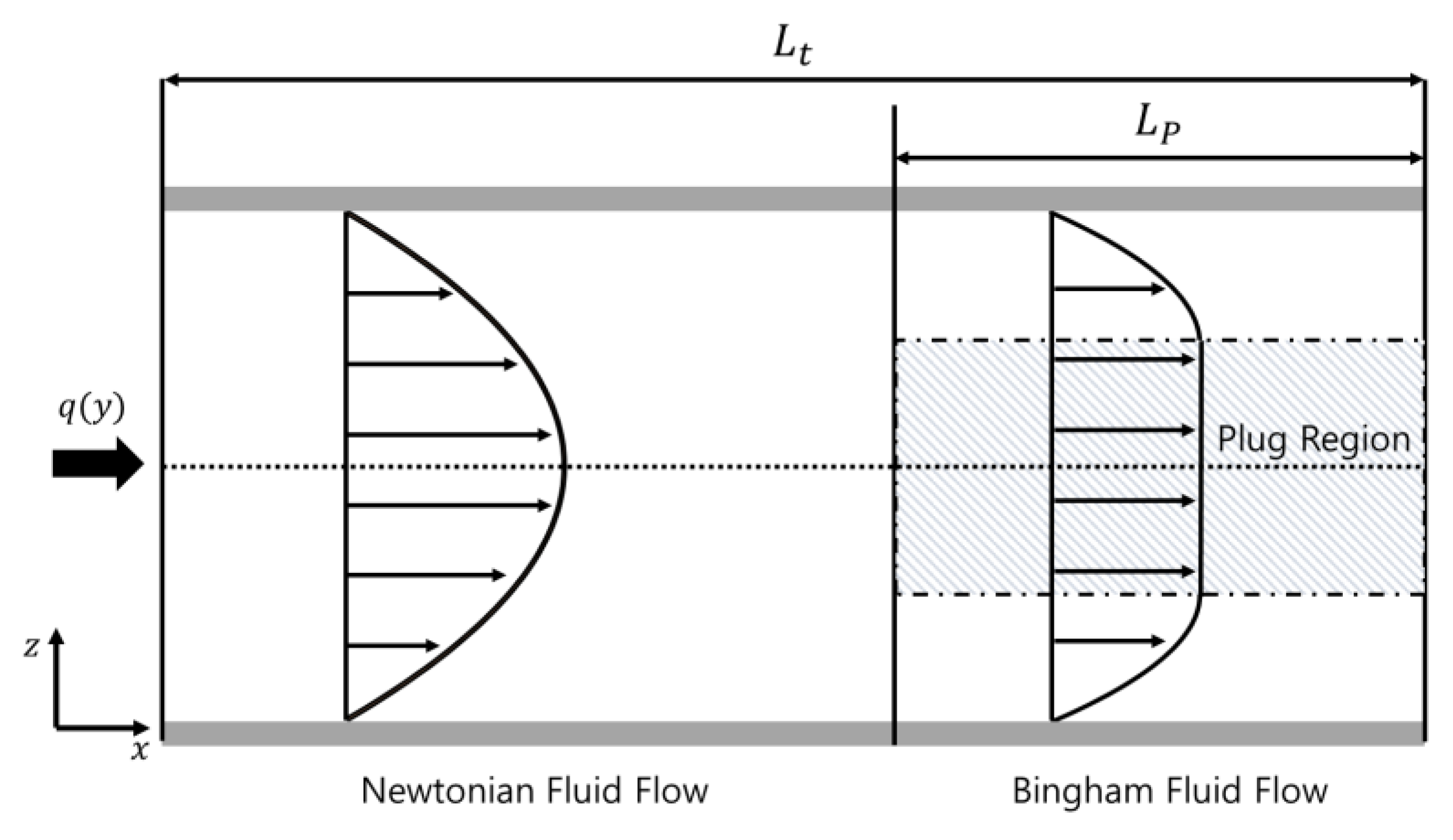
Firstly, the approximate parallel plate model is considered to analyze the flow of MR fluid through general orifice.
Figure 8 shows the schematic configuration of the parallel plate model and the corresponding coordinate system. There are dimensions where L is the effective pole length, b is the approximate width, and h is the gap size of orifice. The
x-axis represents the direction of flow, the
y-axis is the direction along the circumferential direction and
z-axis is the direction of the applied magnetic field. If the flow of MR fluid through orifice is steady and the fully developed laminar flow, the behavior of MR fluid can be analyzed using the Newtonian fluid flow region and the Bingham fluid flow region as shown in
Figure 9.
The pressure drop
depending on the flow rate per unit length
is derived as follows.
where,
is the pressure drop gradient due to Newtonian fluid flow,
is the pressure drop gradient due to Bingham fluid flow,
is the total length of orifice and
is the effective pole length. The pressure drop gradient due to Bingham fluid flow with flow mode is numerically calculated by the following equation [
28].
To simplify and parameterize problems, the non-dimensional parameters are used as follows.
where,
is the pressure drop gradient in plug region of Bingham fluid flow,
and
are the non-dimensional parameters based on
,
, and
are non-dimensional parameters based on
. Using these parameters, Equation
can be expressed as follows.
To simplify the numerical calculations, the approximate solution is given as follows [
32].
3.2. Flow through the Main Orifice
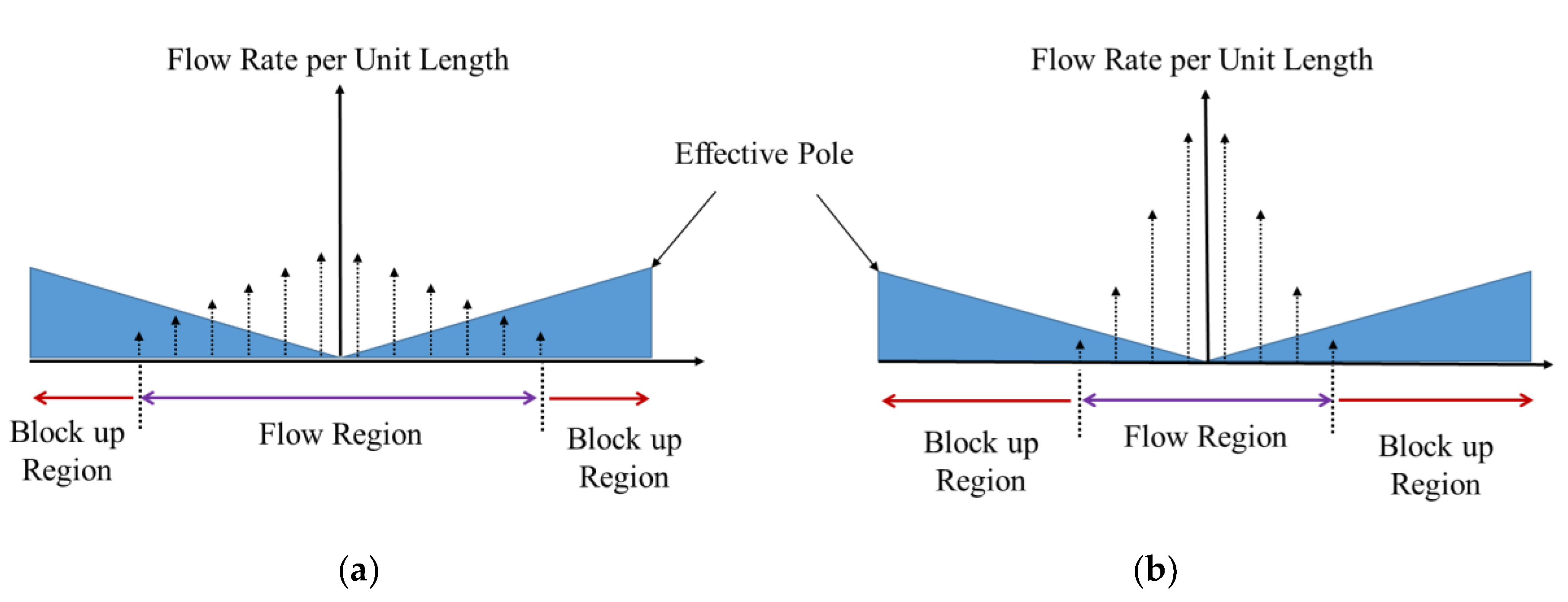
The main orifice of MRD-PSF has two effective poles controlled by one coil. And the effective pole length on the unit section is determined by the pole shape.
Figure 10 shows the behaviors of MR fluid in the main orifice on the unit section. Using the equations derived in the previous section, the relationship between the pressure drop and flow rate in the main orifice can be obtained. For the non-dimensional analysis,
and
is defined, where
is dimensionless effective pole length and
is dimensionless pressure drop gradient such that:
In the above, the subscript M denotes the main orifice,
is the pole shape function which is mathematical function of the pole shape. In the case of the proposed design, the pole shape is spiral shape as shown in
Figure 11. Its mathematical equation is derived as follows.
Thus, the pressure drop,
, in the main orifice is given by:
This can be expressed using the non-dimensional parameters of
and
as follows.
Then,
is derived as follows.
The flow rate per unit length of the main orifice
is obtained by using the nontrivial solution of
as follows.
The total flow rate
flowing through the main orifice can be obtained by integrating the flow rate per unit length over the region where the fluid flow is given by:
where,
is the block-up starting point. If the total pressure drop through the orifice is smaller than the pressure drop due to the yield stress in the Bingham fluid flow region, the block-up phenomenon occurs. This means that
in Equation (13):
where,
is the effective pole length where the block-up begins to occur. Therefore, the block-up starting point
becomes:
Now, using Equations (10), (16) and (19), the flow rate
is obtained as follows.
Considering the block-up region, finally,
can be obtained as follows.
3.3. Flow through the Bypass Orifice
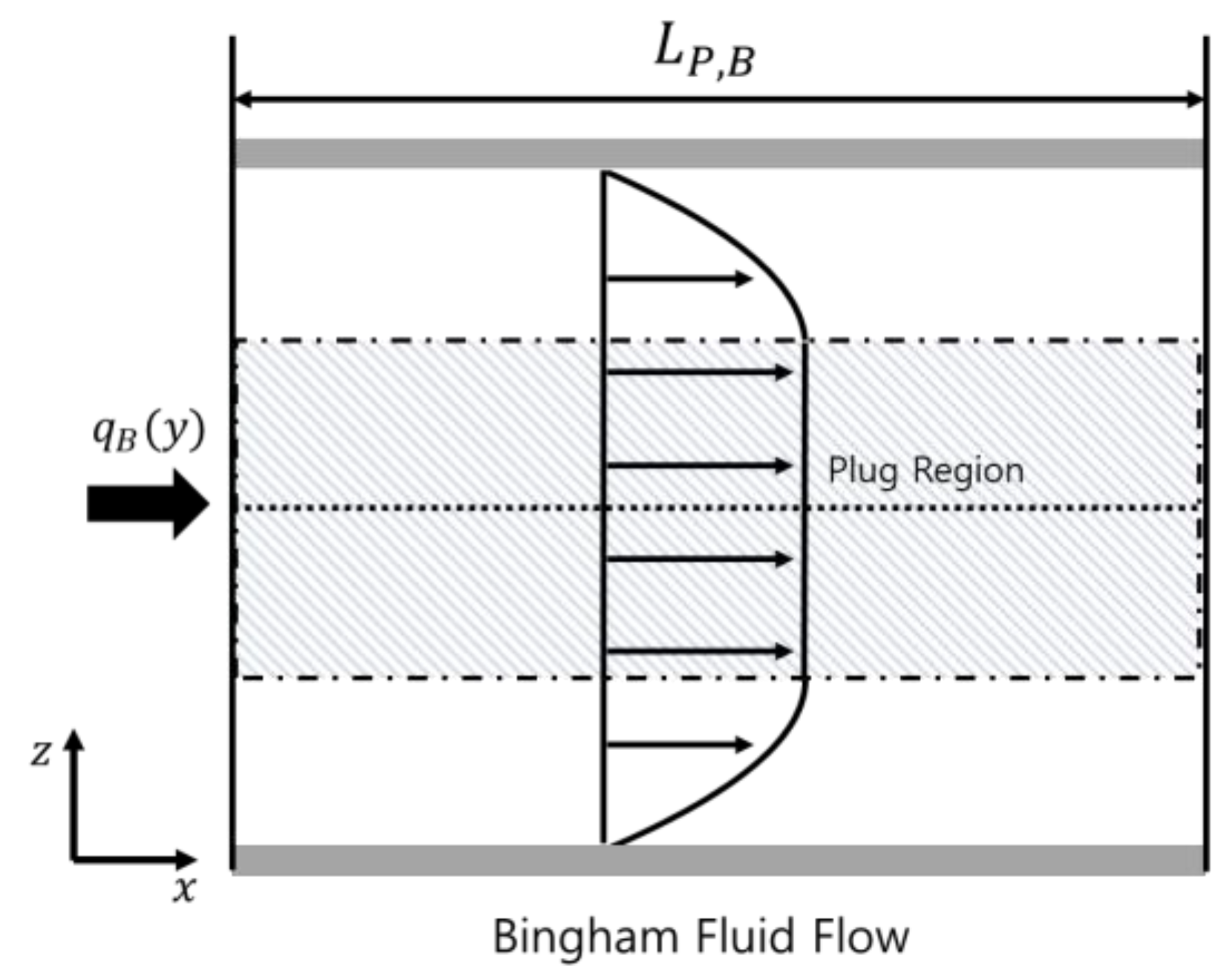
In this work, the bypass orifice consisting of three rectangular ducts operated with the flow mode is considered. All three rectangular ducts are analyzed by one rectangular duct model because they have the same dimension and are affected by the same magnitude of the magnetic field intensity. In this case, the orifice has just Bingham fluid flow as shown in
Figure 12. In the same way as the main orifice, the pressure drop in the bypass orifice
is expressed as follows.
In the above, the subscript B denotes bypass orifice. To achieve approximate solution, the non-dimensional parameter
is defined as follows.
Then, from Equation (8), the following solution is obtained.
In case of the bypass orifice, there is no pole shape function and hence the flow rate per length is constant by
. From the definition of
, the flow rate in the bypass orifice is obtained by:
With Equations (27), (28), and (29), the relationship between the flow rate
and the pressure drop in the bypass orifice
can be obtained as follows [
32].
3.4. Total Flow through the Orifices
So far, the behaviors in each flow path have been independently analyzed. However, there are several flow modes depending on the magnitude of the magnetic intensity in the main orifice and bypass orifice. The main orifice has a closed, partially open, and fully open case. And the bypass orifice has close and fully open case. So, there are six different flow cases that can occur in MRD-PSF. However, because the change from partially open to fully open in the main orifice occurs continuously, there are ultimately four modes as shown in
Table 1. There are three critical pressure drop values determining the modes, where
is the pressure drop for the partially opening of the main orifice,
is the pressure drop for the fully opening of the main orifice, and
is the pressure for the opening of the bypass orifice. These are given by:
Furthermore, based on the equation of continuity, the constitutive equation between total pressure drop and total flow rate can be obtained as follows.
4. Damping Force Characteristics
Total damping force of the proposed MRD-PSF is generated by the pressure difference between top and bottom chambers. If the damper is in a quasi-static motion and mechanical friction is neglected, it is calculated as follows.
where,
is the pressure of the upper chamber,
is the pressure of the lower chamber,
is the area of the piston,
is the area of the piston rod and
is the pressure of the air chamber. Total damping force is composed of damping force and air spring force.
Among many operation flow modes in
Table 1, Mode 1 and Mode 2 are suitable to the proposed MRD-PSF in the sense of the operating principle described in
Section 2. When the stroke velocity is low, only the main orifice is opened to realize high damping coefficient (Mode 1) and the bypass orifice is opened at the breaking point to provide low damping coefficient (Mode 2). In this case, damping force at the breaking point is
. To evaluate the damping characteristic of the proposed damper, computer simulations are conducted. The design parameters used in the simulation are shown in
Table 2. These parameters are chosen by considering the level of the damping force required for a middle-sized vehicle suspension system. The weight of the proposed MRD-PSF is 2.9 kg and the required electrical power with maximum operating current 1A, resistance of Coil 2 (5.4 Ω) and resistance of Coil 1 (2.1 Ω) is less than 10 W.
4.1. Damping Coefficient Control
As mentioned in
Section 2, the damping coefficient change can be achieved by changing the effective orifice area of the main orifice before the SBP. The damping coefficient control is realized through the input current applied to the main orifice control part
as shown in
Figure 13. At this time, the current applied to the bypass orifice control part
is set to 2A so that the bypass orifice is initially closed. It is seen that the damping force is degressively increased before the SBP. This is because the damping coefficient can be controlled critically when the main orifice is partially open with the closed bypass orifice. After the main orifice is fully opened, the degree of damping coefficient change is reduced. When
is 2A, the point (damping force) where the bypass orifice is open is evaluated by 1326 N. Here, in order to evaluate the linear damping characteristics, the equivalent damping coefficient is defined as the linear gradient up to the SBP. When are 3, 2, 1, and 0 A, the equivalent damping coefficients are evaluated by 10,763, 8220, 4688, and 2295
, respectively. And it is seen that the noticeable change in the damping coefficient occurs before the SBP. In additional, this tendency depends on the pole shape function. On the other hand, the damping coefficient is almost constant after the SBP. This is because the effective area of the bypass orifice is significantly larger than the effective area of the main orifice.
4.2. Position Control of the SBP
The SBP is determined whether the bypass orifice is opened or closed. The SBP change depending on the current applied to the bypass orifice control part
is shown in
Figure 14. At this time, the current applied in main orifice control part
is set to 3 A so that it makes the effect of main orifice constant. When
are 2, 1.5, 1, and 0.5 A, the point (damping force) where the bypass orifice is open is evaluated by 1326, 1063, 736, and 369 N. It is observed that the dramatic change in the damping coefficient occurs before and after these points. It is also seen that the stroke velocity at the SBP increases as the current applied to the bypass orifice
increases.
4.3. Desired Damping Force Characteristics
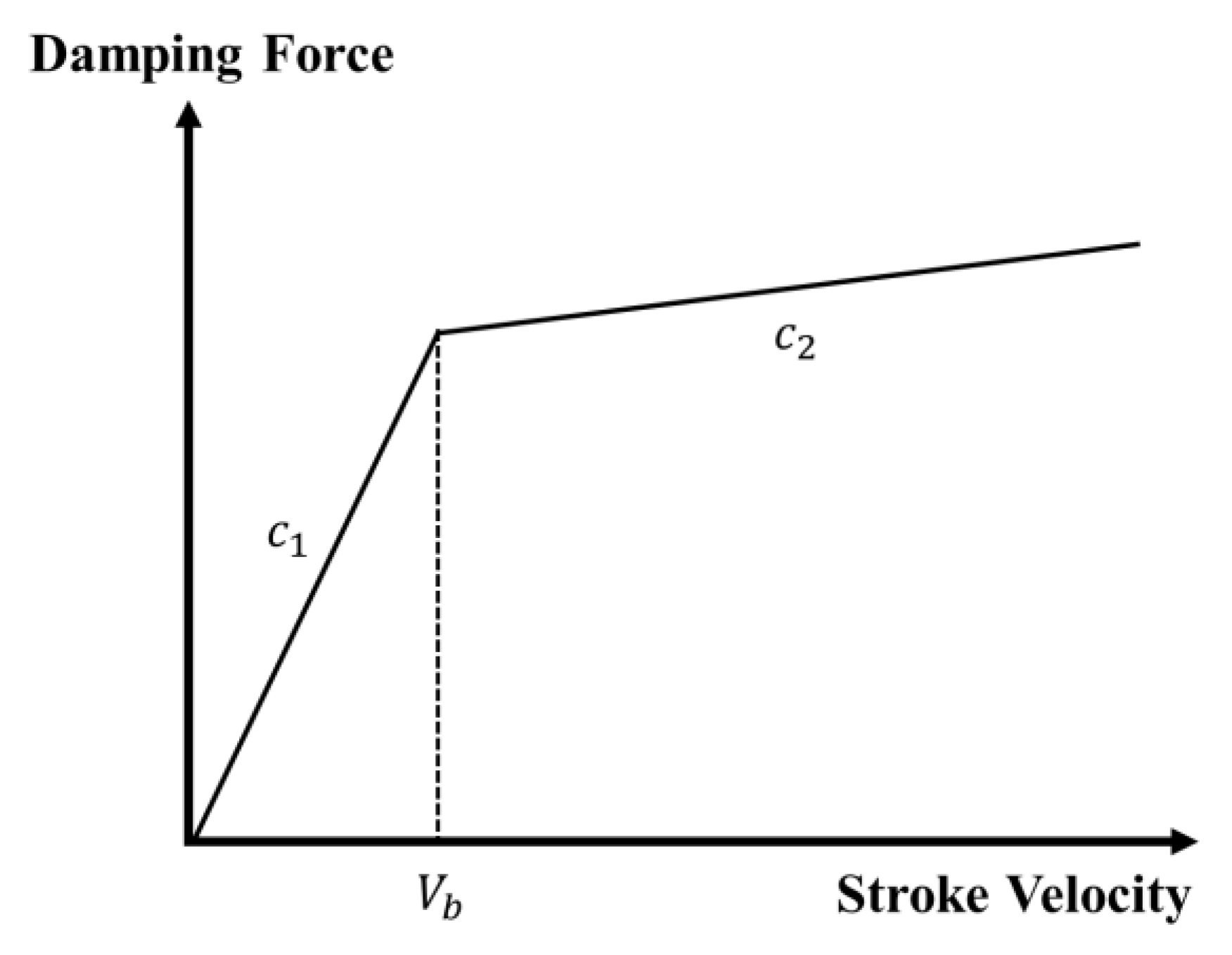
The damping characteristics of the passive damper and the proposed MRD-PSF can be regarded as bilinear damping characteristics.
Figure 15 shows the bilinear damping characteristic. There are essential two parameters:
is high damping coefficient before the SBP and
is low damping coefficient after the SBP. In the figure,
is the stroke velocity at the SBP. The characteristic of the proposed MRD-PSF is dependent on
and
.
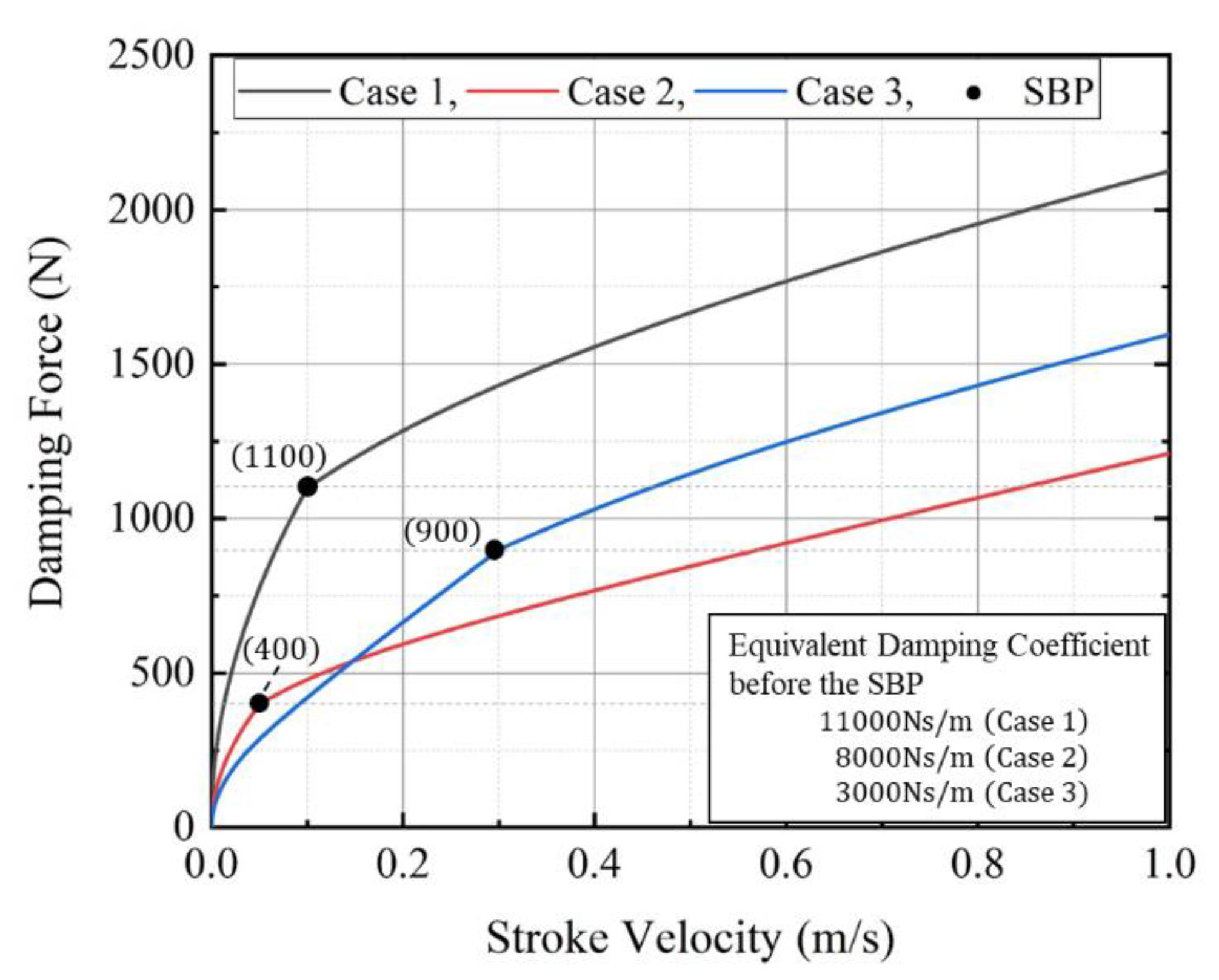
Table 3 shows the required input current in the main orifice and bypass orifice of
for implementing desired parameters
and
. Based on these parameters, the damping force characteristics of three different cases are determined as shown in
Figure 16.
and
of Case 1 are 11,000
and 0.1
and desired input current
and
are 2.33 and 1.56 A.
and
of Case 2 are 8000
and 0.05
and desired input current
and
are 0.27 and 1.24 A.
and
of Case 3 are 3000
and 0.3
and desired input current
and
are 0.53 and 0.54 A. Therefore, it can be confirmed that the required bilinear damping characteristic in dynamic range can be achieved through two independent control variables. This is one of salient features of the proposed MRD-PSF.
5. Conclusions
In this work, a new type of MR damper having a specific pole shape function (MRD-PSF in short) was proposed and its effectiveness was demonstrated through computer simulations. After explaining the operating principle of the proposed damper with the schematic configuration, the field-dependent damping forces (or coefficients) characteristics are analyzed considering the main orifice and the bypass orifice. The activation of the main orifice can alter the magnitude of the damping coefficient, while the activation of the bypass orifice can change the position of the SBP. Subsequently, a certain desired damping force imposed in a wide stroke (or piston velocity) range can be realized by controlling input currents to be applied to the main orifice and bypass orifice, respectively. In other words, the bilinear damping characteristics required in real operation of vehicle suspension systems to achieve high ride comfort and steering stability can be realized by activating two independent parameters of the main orifice and bypass orifice in the open-loop control manner.
It is finally remarked that to validate the modelling and simulation shown in this work, the prototype fabrication of the MRD-PSF is ongoing. Its damping force characterization will be empirically evaluated and its application to the vehicle suspension system will be carried out in the future. In addition, control performance of a vehicle suspension system equipped with the proposed MR damper is to be carried out in the future to enhance both ride comfort and road holding property.

 ,
, 
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}