
Abstract
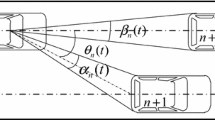
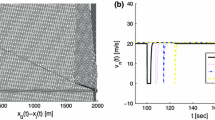
The car-following behavior has attracted much attention in past decades. However, the majority of the existing studies ignored the fact that the following vehicle in car-following may prevent the lane-changing of the vehicle on the adjacent lanes, when a large gap exists between the following and leading vehicles. Therefore, this paper proposes a new car-following model considering the lane-changing prevention effect. The final velocity of the following vehicle is a combination of a safe velocity and a lane-changing prevention velocity. The stability condition of the model is derived and verified through numerical simulation, and impacts of several factors on stability are analyzed. The results display that the stability condition is consistent with the simulation results. The most significant factors impacting on the stability are the safe time-headway for lane-changing and the contribution proportion α of the safe velocity and lane-changing prevention velocity. The optimal values exist for the proportion α and lane-changing time headway that can make the stability of the traffic flow the highest.
Graphical abstract

Similar content being viewed by others

References
L.A. Pipes, J. Appl. Phys. 24, 274 (1953)
L. Guo, et al., Physica A 471, 436 (2017)
H. Kuang, et al., Nonlinear Dyn. 87, 149 (2017)
J. Leng, et al., J. Harbin Inst. Technol. 24, 91 (2017)
M.P.A. Moghadam, P. Pahlavani, B. Bigdeli, Int. J. Civil Eng. 15, 1159 (2017)
T. Tang, et al., Acta Mech. Sinica 23, 49 (2007)
Y. Zheng, R. Cheng, H. Ge, Phys. Lett. A 381, 2137 (2017)
X. Li, et al., PLoS ONE 13, e0200110 (2018)
S. Yu, et al., Physica A 531, 121789 (2019)
D. Yang, et al., IEEE Trans. Intell. Transport. Syst. 17, 2984 (2016)
D.C. Gazis, R. Herman, R.W. Rothery, Operat. Res. 9, 545 (1961)
E. Kometani, T. Sasaki, inProceedings of the Symposium on Theory of Traffic Flow, 105 (1959)
P.G. Gipps, Transport. Res. B 15, 105 (1981)
R. Michaels, inProceedings of the 2nd International Symposium on the Theory of Road Traffic Flow, London, England, 1963
S. Kikuchi, P. Chakroborty, Transport. Res. Record 1365, 82 (1992)
R.E. Chandler, R. Herman, E.W. Montroll, Operat. Res. 6, 165 (1958)
D.C. Gazis, R. Herman, R.B. Potts, Operat. Res. 7, 499 (1959)
R. Herman, et al., Operat. Res. 7, 86 (1959)
T. Tang, et al., Netw. Spatial Econ. 14, 465 (2014)
H. Huang, T. Tang, Z. Gao, Acta Mech. Sinica. 22, 131 (2006)
S. Lee, D. Ngoduy, M. Keyvanekbatani, Transport. Res. C 106, 360 (2019)
D. Yang, et al., inTransportation Research Board 94th Annual Meeting, Washington, DC United States, 2015
T. Tang, et al., Physica A 390, 3362 (2011)
P.G. Gipps, Transport. Res. B 20, 403 (1986)
S. Kurata, T. Nagatani, Physica A 318, 537 (2003)
R. Nagai, T. Nagatani, N. Taniguchi, Physica A 350, 548 (2005)
P. Hidas, Transp. Res. C Emerg. Technol. 10, 351 (2002)
L. Zheng, S. Ma, S. Zhong, Chin. Physi. B 20, 088701 (2011)
K. Konishi, H. Kokame, K. Hirata, Eur. Phys. J. B 15, 715 (2000)
D. Yang, et al., Physica A 395, 371 (2014)
M. Bando, et al., Phys. Rev. E 51, 1035 (1995)
A. Nakayama, Y. Sugiyama, K. Hasebe, Phys. Rev. E 65, 016112 (2001)
K. Hasebe, A. Nakayama, Y. Sugiyama, Phys. Rev. E 68, 026102 (2003)
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
The EPJ Publishers remain neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Jia, B., Yang, D., Zhang, X. et al. Car-following model considering the lane-changing prevention effect and its stability analysis. Eur. Phys. J. B 93, 153 (2020). https://doi.org/10.1140/epjb/e2020-10028-3
Received:
Revised:
Published:
DOI: https://doi.org/10.1140/epjb/e2020-10028-3