Experimental Determination of Non-Linear Roll Damping of an FPSO Pure Roll Coupled with Liquid Sloshing in Two-Row Tanks



Abstract
:1. Introduction
2. Theoretical Background
2.1. Quasi-Linear Method (Logarithmic Decrement)
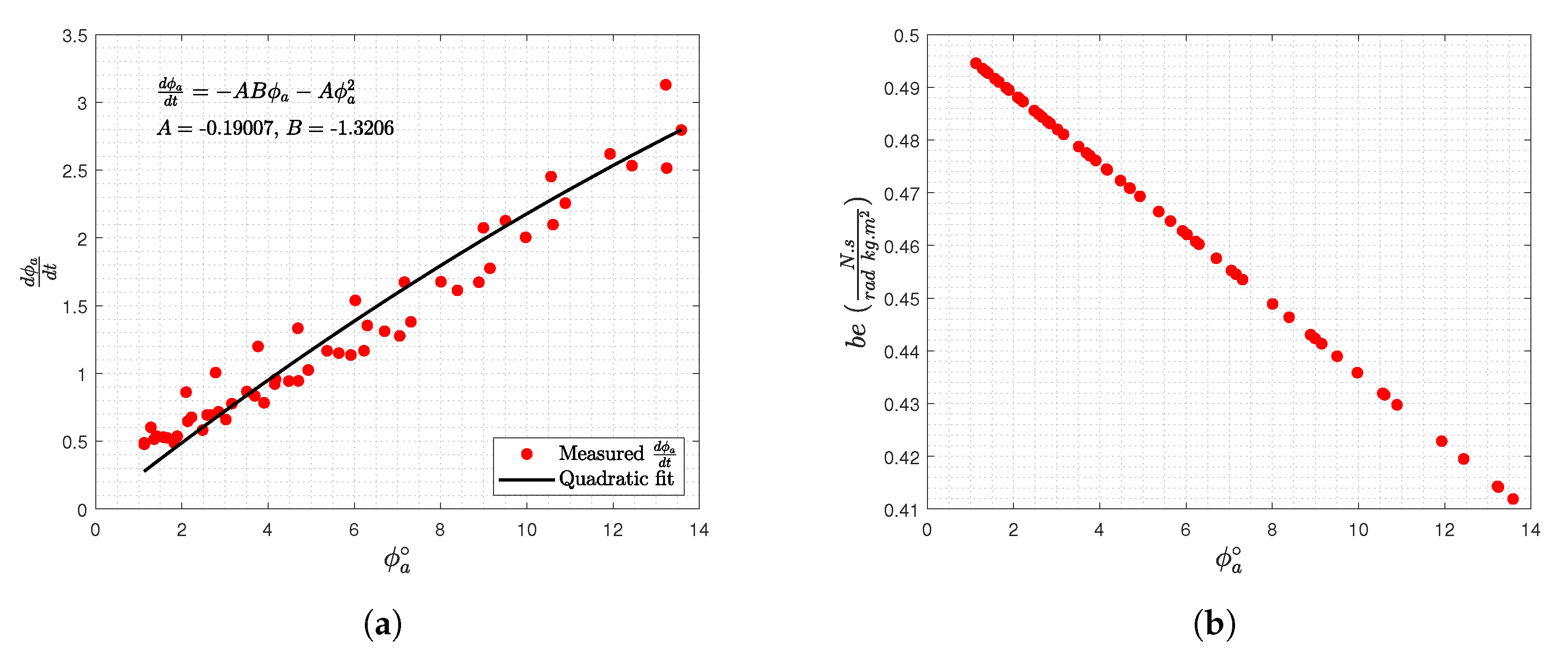
2.2. Froude Energy Method
2.3. Averaging Method
2.4. Perturbation Method
3. Experimental Set Up
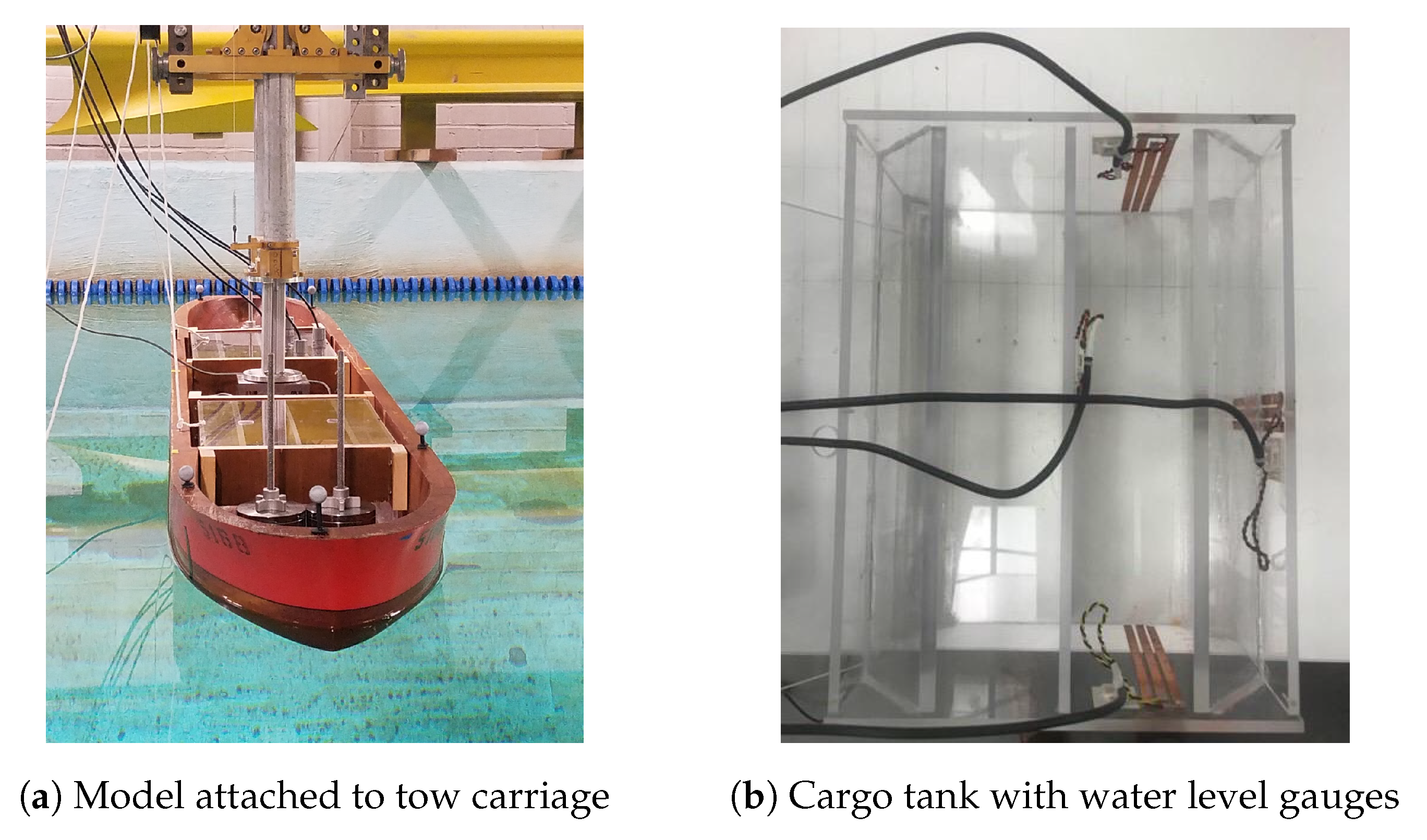
3.1. Model and Instrumentation
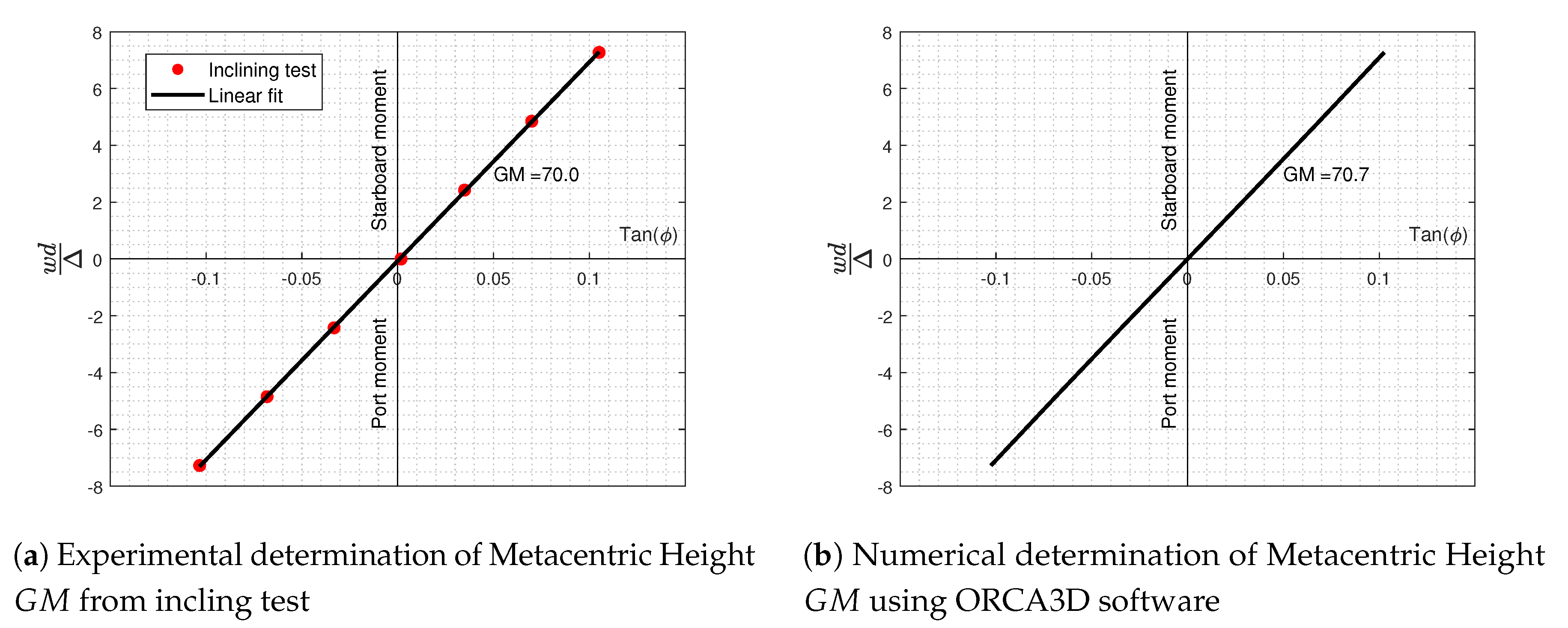
3.2. Inclination Test
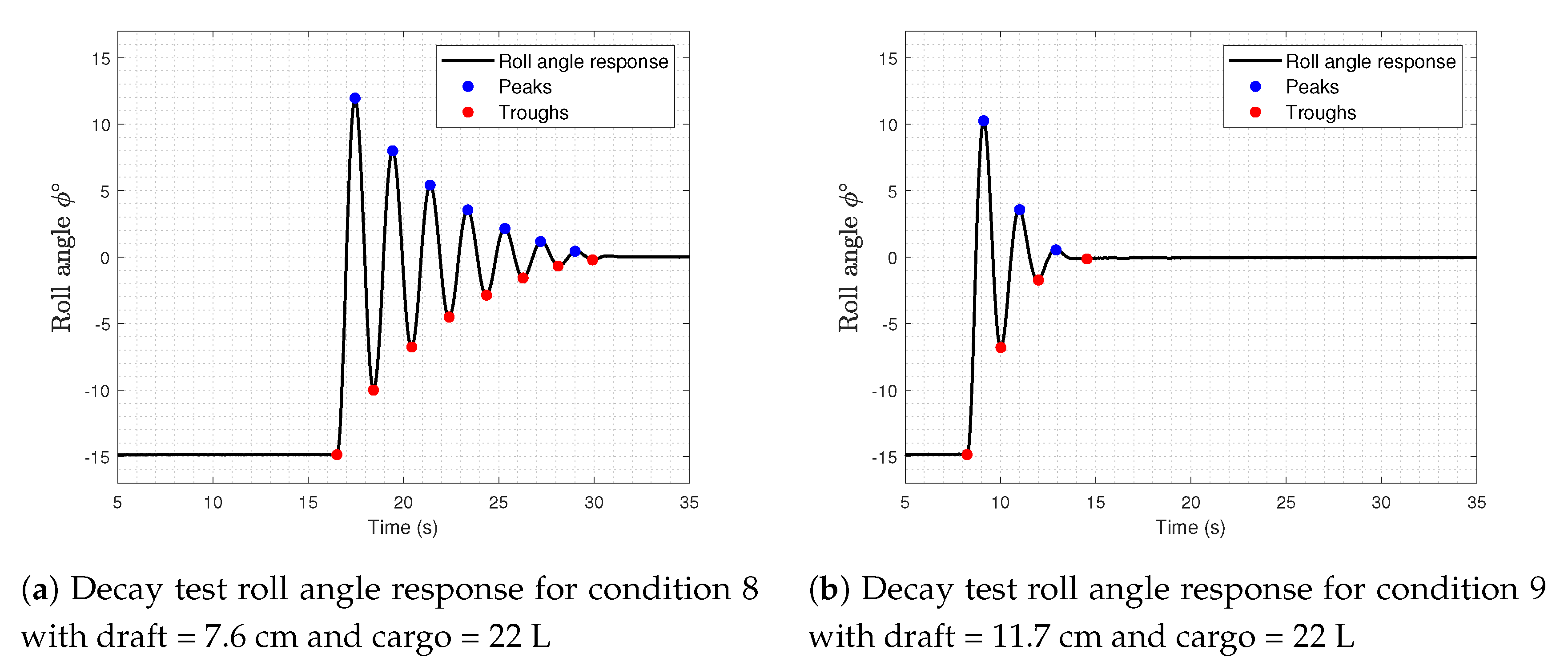
3.3. Roll Decay Test
4. Results and Discussion
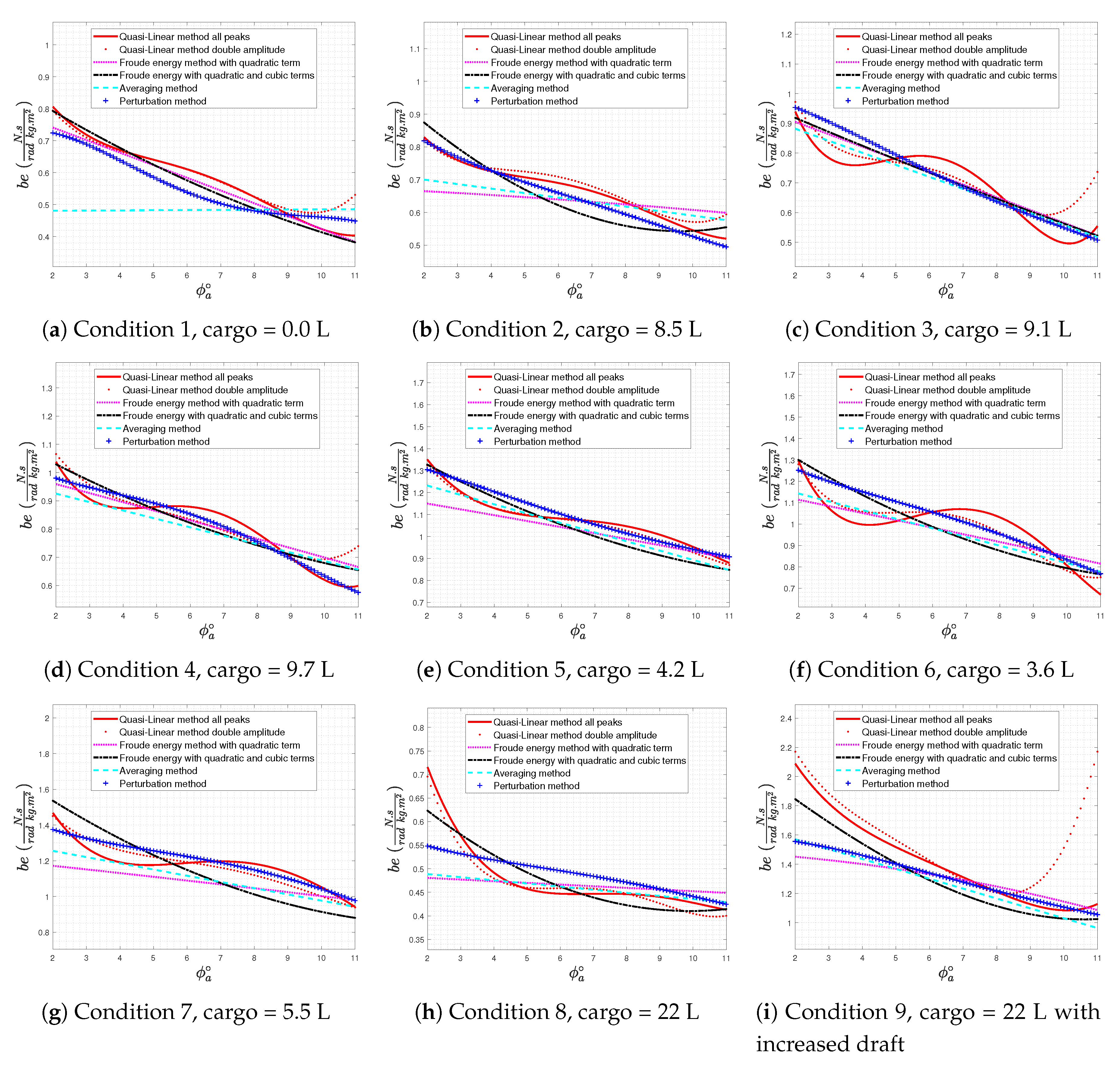
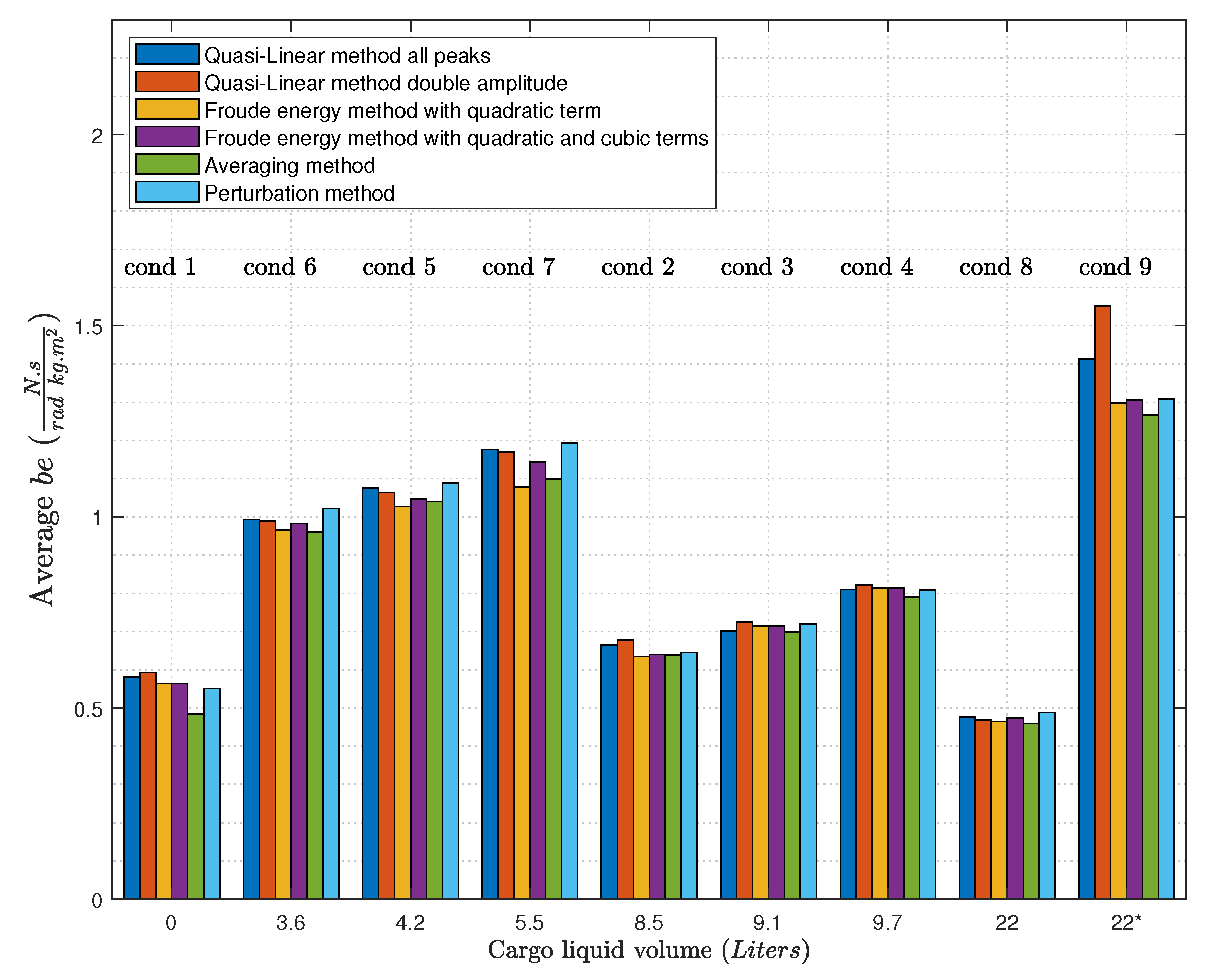
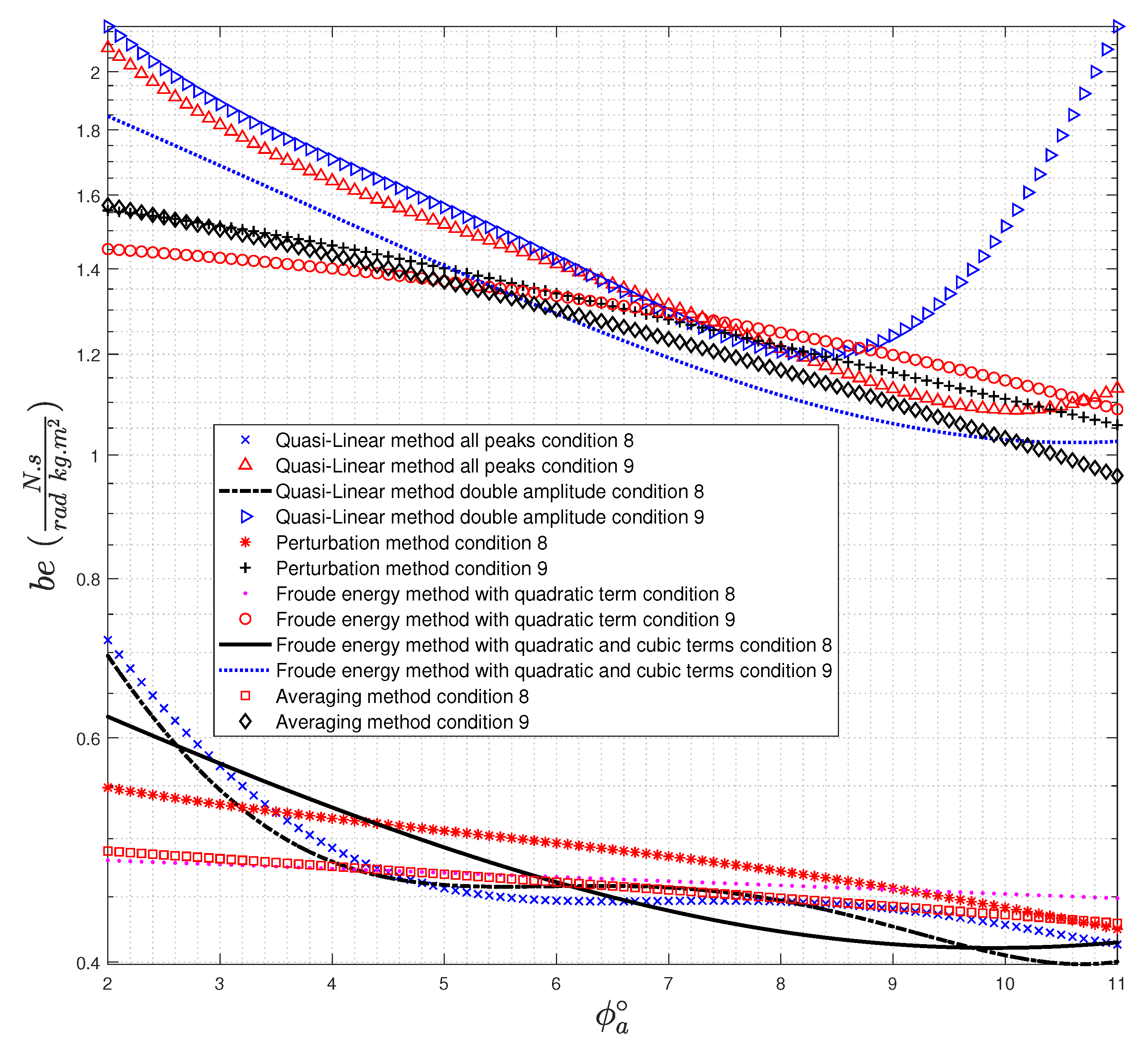
4.1. Effect of Analyzing Method
4.2. Effect of Liquid Cargo
4.3. Effect of Volume Displacement
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
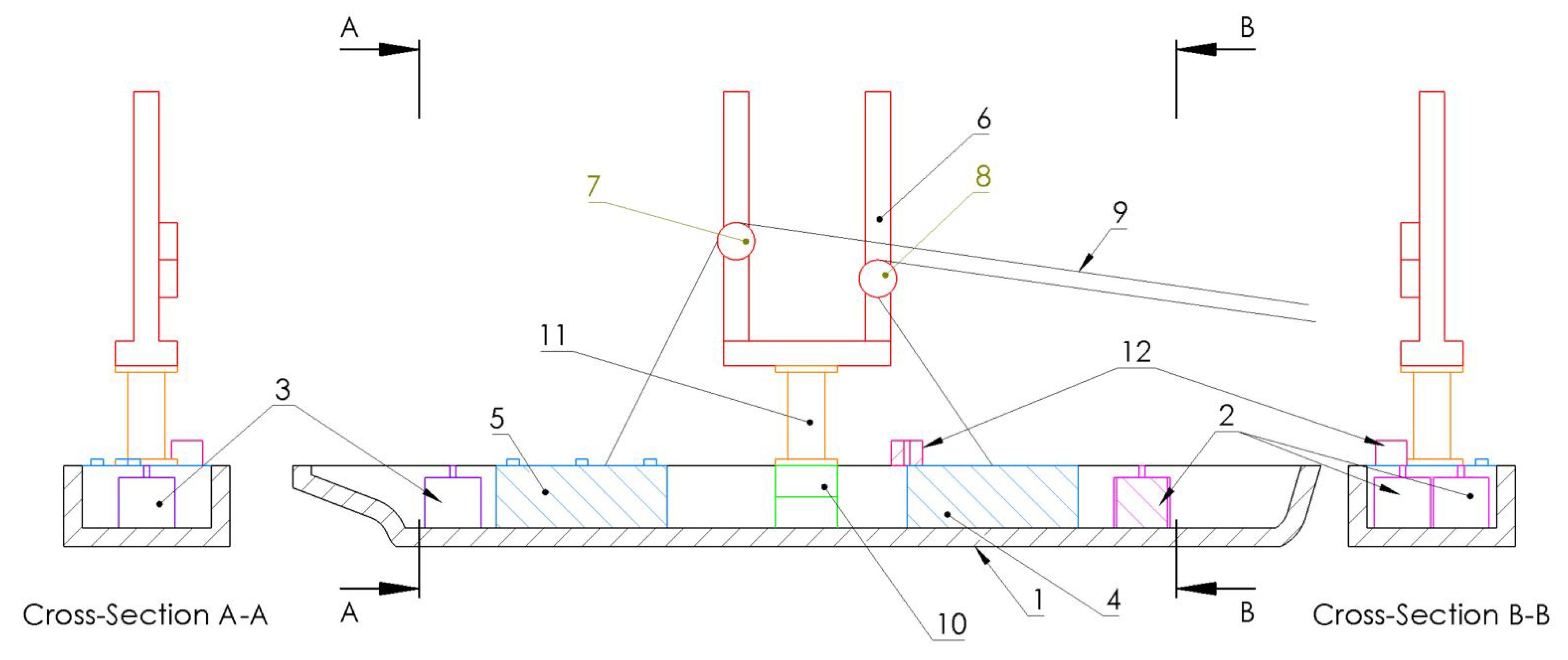
Appendix A. Test Equipment

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Unit Name and Figure Number | LCG [mm] from Aft | VCG [mm] from Keel | Mass [Kg] |
|---|---|---|---|
| FPSO Hull (1) with Ballast (2 and 3) | 1136.0 | 91.6 | 24.10 |
| and Empty Cargo Tanks (4 and 5) | |||
| Forward Ballasts (2) | |||
| (Roll Decay Test) | |||
| Port Ballast (TCG = 44.45 mm) | 1771.65 | 117.81 | 4.72 |
| Starboard Ballast (TCG = −44.45 mm) | 1771.65 | 117.81 | 4.72 |
| (Inclination Test) | |||
| Port Ballast (TCG = 44.45 mm) | 1771.65 | 110.30 | 4.15 |
| Starboard Ballast (TCG = −44.45 mm) | 1771.65 | 110.30 | 4.15 |
| Aft Ballast (3) | |||
| (Roll Decay Test) | 400.05 | 129.81 | 5.67 |
| (Inclination Test) | 400.05 | 121.80 | 4.77 |
| Forward Cargo Tank (4) | 770.64 | Varies | Varies |
| Aft Cargo Tank (5) with Water Level Gauges | 1529.08 | Varies | Varies |
| Heave Post (6) with Pulleys and clamps (7 and 8) | 412.50 | 685.80 | 3.20 |
| Pivot Box and Drag Balance (10) | 412.50 | 190.55 | 3.88 |
| Attachment Bar (11) | 1677.92 | 304.8 | 0.71 |
| Incline Weight (12) | 1328.42 | 280.80 | 2.04 |
| Strings used to induce roll (9) |

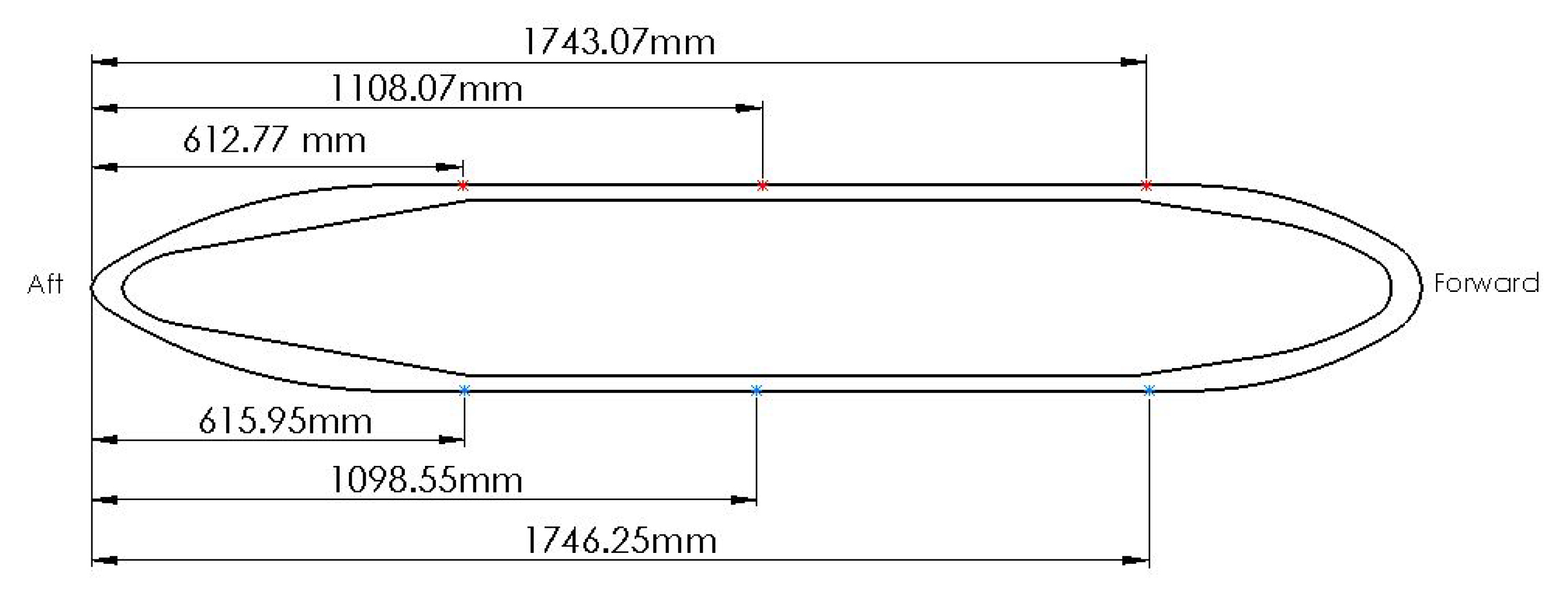
| Incline Test (Port) | Location (mm) | 612.77 | 1108.07 | 1743.07 | |
| Draft (mm) | 66 | 66 | 66 | ||
| Roll Decay Test (Starboard) | Location (mm) | 615.95 | 1098.55 | 1746.25 | |
| Draft (mm) | Condition 1–8 | 70 | 78 | 81 | |
| Condition 9 | 105 | 117 | 125 | ||


Appendix A.1. Ballast Weight and Weight Posts
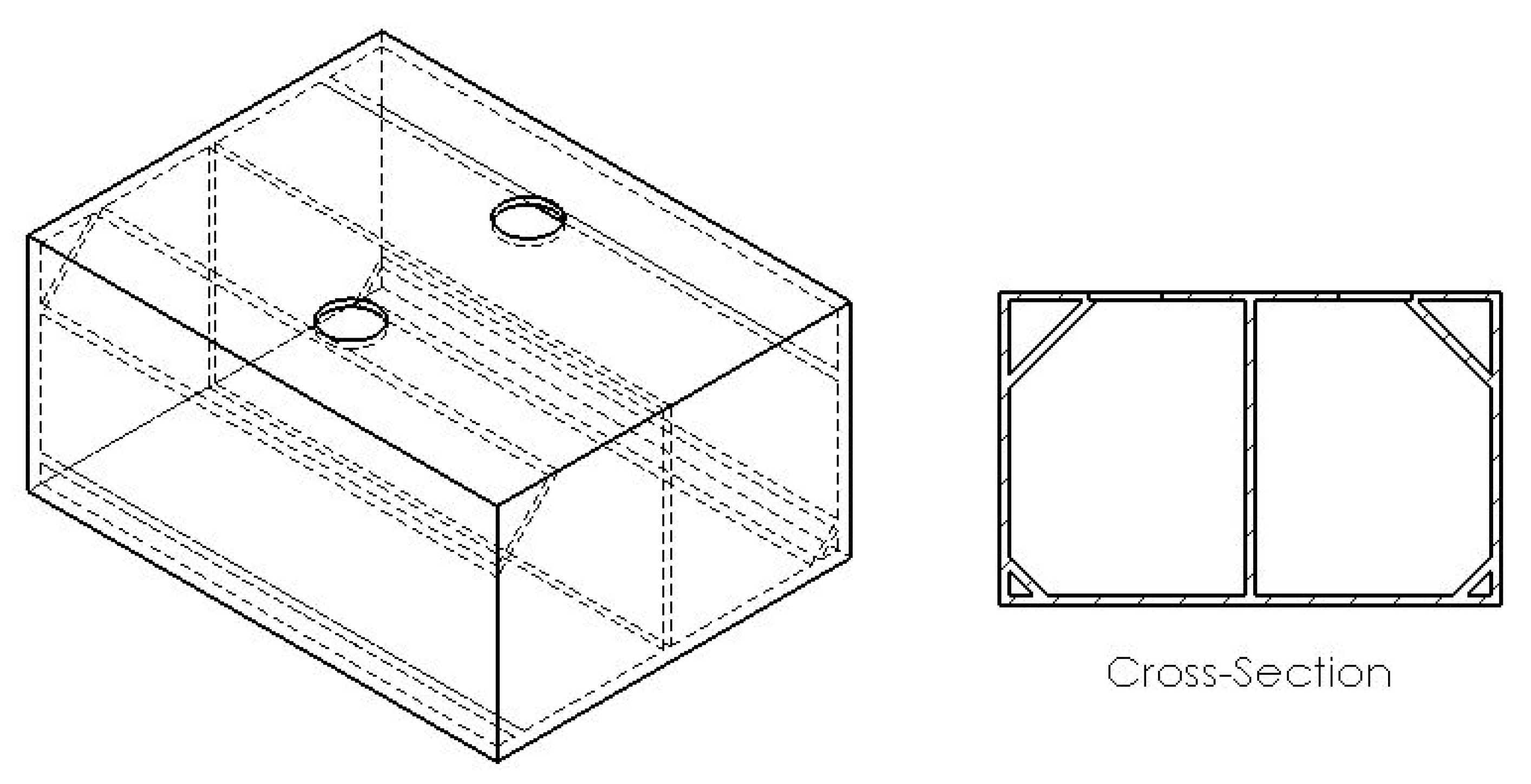
Appendix A.2. Cargo Tank
Appendix A.3. Towing Carriage and Heaving Post
Appendix A.4. Pivot Box
References
- Balthazar, J.M.; Gonçalves, P.B.; Lenci, S.; Mikhlin, Y.V. Models, Methods, and Applications of Dynamics and Control in Engineering Sciences: State of the Art. Math. Probl. Eng. 2010, 2010. [Google Scholar] [CrossRef] [Green Version]
- Guze, S.; Wawrzynski, W.; Wilczynski, P. Determination of Parameters Describing the Risk Areas of Ships Chaotic Rolling on the Example of LNG Carrier and OSV Vessel. J. Mar. Sci. Eng. 2020, 8, 91. [Google Scholar] [CrossRef] [Green Version]
- Kim, Y.; Park, M.J. Identification of the nonlinear roll damping and restoring moment of a FPSO using Hilbert transform. Ocean Eng. 2015, 109, 381–388. [Google Scholar] [CrossRef]
- Arai, M.; Cheng, L.; Inoue, Y.; Sasaki, H.; Yamagishi, N. Numerical analysis of liquid sloshing in tanks of FPSO. In Proceedings of the Second International Offshore and Polar Engineering Conference, San Francisco, CA, USA, 14–19 June 1992. [Google Scholar]
- Zhao, W.; Efthymiou, M.; McPhail, F.; Wille, S. Nonlinear roll damping of a barge with and without liquid cargo in spherical tanks. J. Ocean Eng. Sci. 2016, 1, 84–91. [Google Scholar] [CrossRef] [Green Version]
- Chakrabarti, S. Empirical calculation of roll damping for ships and barges. Ocean Eng. 2001, 28, 915–932. [Google Scholar] [CrossRef]
- ITTC. Numerical estimation of roll damping. In Proceedings of the 26th International Towing Tanks Conference, Rio de Janeiro, Brazil, 28 August–3 September 2011. Number 7.5-02-07-04.5. [Google Scholar]
- Salvesen, N.; Tuck, E.; Faltinsen, O. Ship Motions and Sea Loads; The Society of Naval Architects and Marine Engineers: New York, NY, USA, 1970. [Google Scholar]
- Prpić-Oršić, J.; Čorić, V. Seakeeping; University of Rijeka: Rijeka, Croatia, 2006. [Google Scholar]
- Guo, Z.; Ma, Q.; Yu, S.; Qin, H. A body-nonlinear Green’s function method with viscous dissipation effects for large-amplitude roll of floating bodies. Appl. Sci. 2018, 8, 517. [Google Scholar] [CrossRef] [Green Version]
- Froude, W.; Abell, S.W.; Gawn, R.; Duckworth, A. The Papers of William Froude, 1810–1879: With a Memoir by Sir Westcott Abell and an Evaluation of William Froude’s Work by RWL Gawn: Collected Into One Volume; Institution of Naval Architects: London, UK, 1955. [Google Scholar]
- Ikeda, Y.; Himeno, Y.; Norio, T. A prediction method for ship roll damping. In Report No. 00405 of the Department of Naval Architecture; University of Osaka Prefecture: Osaka, Japan, 1978. [Google Scholar]
- Kianejad, S.; Lee, J.; Liu, Y.; Enshaei, H. Numerical assessment of roll motion characteristics and damping coefficient of a ship. J. Mar. Sci. Eng. 2018, 6, 101. [Google Scholar] [CrossRef] [Green Version]
- Remola, A.O. On Ship Roll Damping: Analysis and Contributions on Experimental Techniques. Ph.D. Thesis, Universidad Politécnica de Madrid, Madrid, Spain, 2018. [Google Scholar]
- Handschel, S.; Feder, D.F.; Abdel-Maksoud, M. Estimation of ship roll damping-A comparison of the decay and the harmonic excited roll motion technique for a post panamax container ship. In Proceedings of the 12th International Conference on the Stability of Ships and Ocean Vehicles, Glasgow, UK, 14–19 June 2015; pp. 475–488. [Google Scholar]
- Bačkalov, I.; Bulian, G.; Cichowicz, J.; Eliopoulou, E.; Konovessis, D.; Leguen, J.F.; Rosén, A.; Themelis, N. Ship stability, dynamics and safety: Status and perspectives from a review of recent STAB conferences and ISSW events. Ocean Eng. 2016, 116, 312–349. [Google Scholar] [CrossRef]
- Kinnas, S.A.; Yi-Hsiang, Y.; Vinayan, V. Prediction of flows around FPSO hull sections in roll using an unsteady Navier-Stokes solver. In Proceedings of the Sixteenth International Offshore and Polar Engineering Conference, San Francisco, CA, USA, 28 May–2 June 2006. [Google Scholar]
- Thiagarajan, K.P.; Braddock, E.C. Influence of bilge keel width on the roll damping of FPSO. J. Offshore Mech. Arct. Eng. 2010, 132, 011303-1–011303-7. [Google Scholar] [CrossRef]
- Blume, P. Experimentell bestimmung von koeffizienten der wirksamen rolldämpfung und ihre anwedung zur abschätzung extremer rollwinkel. In Institut für Schiffbau, Universität Hamburg, Bericht Nr. 1511, Zeitschrifft “Schiffstechnik’, Band 26, 1979; Universität Hamburg: Hamburg, Germany, 1979. [Google Scholar]
- Handschel, S.; Abdel-Maksoud, M. Improvement of the harmonic excited roll motion technique for estimating roll damping. Ship Technol. Res. 2014, 61, 116–130. [Google Scholar] [CrossRef]
- Wassermann, S.; Feder, D.F.; Abdel-Maksoud, M. Estimation of ship roll damping—A comparison of the decay and the harmonic excited roll motion technique for a post panamax container ship. Ocean Eng. 2016, 120, 371–382. [Google Scholar] [CrossRef]
- Avalos, G.O.; Wanderley, J.B. A Two-Dimensional Numerical Simulation of Roll Damping Decay of a FPSO Using the Upwind TVD Scheme of Roe-Sweby. In International Conference on Offshore Mechanics and Arctic Engineering; American Society of Mechanical Engineers: New York, NY, USA, 2012; Volume 44915, pp. 395–402. [Google Scholar]
- Avalos, G.O.; Wanderley, J.B.; Fernandes, A.C.; Oliveira, A.C. Roll damping decay of a FPSO with bilge keel. Ocean Eng. 2014, 87, 111–120. [Google Scholar] [CrossRef]
- Zhou, Y.H.; Ma, N.; Shi, X.; Zhang, C. Direct calculation method of roll damping based on three-dimensional CFD approach. J. Hydrodyn. 2015, 27, 176–186. [Google Scholar] [CrossRef]
- Gu, Y.; Boulougouris, E.; Day, A. A Study on the Effects of Bilge Keels on Roll Damping Coefficient. In Proceedings of the 12th International Conference on the Stability of Ships and Ocean Vehicles, Glasgow, UK, 14–19 June 2015. [Google Scholar]
- Rodríguez, C.A.; Esperança, P.T.; Oliveira, M.C. Estimation of Roll Damping Coefficients Based on Model Tests Responses of a FPSO in Waves. In International Conference on Offshore Mechanics and Arctic Engineering; American Society of Mechanical Engineers: New York, NY, USA, 2019; Volume 58851, p. V07BT06A021. [Google Scholar]
- Zeraatgar, H.; Asghari, M.; Bakhtiari-Nejad, F. A study of the roll motion by means of a free decay test. J. Offshore Mech. Arct. Eng. 2010, 132, 031303. [Google Scholar] [CrossRef]
- Oliva-Remola, A.; Bulian, G.; Pérez-Rojas, L. Estimation of damping through internally excited roll tests. Ocean Eng. 2018, 160, 490–506. [Google Scholar] [CrossRef]
- Spouge, J. Non-linear analysis of large-amplitude rolling experiments. Int. Shipbuild. Prog. 1988, 35, 271–324. [Google Scholar]
- Bulian, G. Estimation of nonlinear roll decay parameters using an analytical approximate solution of the decay time history. Int. Shipbuild. Prog. 2004, 51, 5–32. [Google Scholar]
- ESilva, S.R.; Soares, C.G. Prediction of parametric rolling in waves with a time domain non-linear strip theory model. Ocean Eng. 2013, 72, 453–469. [Google Scholar]
- Uzunoglu, E.; Soares, C.G. Automated processing of free roll decay experimental data. Ocean Eng. 2015, 102, 17–26. [Google Scholar] [CrossRef]
- Sun, J.; Shao, M. Estimation of Nonlinear Roll Damping by Analytical Approximation of Experimental Free-Decay Amplitudes. J. Ocean Univ. China 2019, 18, 812–822. [Google Scholar] [CrossRef]
- Roberts, J.B. Estimation of Non-Linear Ship Roll Damping from Free-Decay Data; Technical Report; Journal of Ship Research, Vol. 29, No. 2; The Society of Naval Architects and Marine Engineers; University of Sussex: Brighton, UK, 1985; pp. 127–138. [Google Scholar]
- Flower, J.; Sabti Aljaff, W. Kryloff-Bogoliuboff’s solution to decaying nonlinear oscillations in marine systems. Int. Shipbuild. Prog. 1980, 27, 225–230. [Google Scholar] [CrossRef]
- Himeno, Y. Prediction of Ship Roll Damping—A State of the Art; Technical Report; University of Michigan: Ann Arbor, MI, USA, 1981. [Google Scholar]
- Dalzell, J. A Note on the Form of Ship Roll Damping; Technical Report; Stevens Inst of Tech Hoboken N Davidson Lab.: Hoboken, NJ, USA, 1976. [Google Scholar]
- Zubaly, R.B. Applied Naval Architecture; Cornell Maritime Press, Schiffer Publishing, Ltd.: Atglen, PA, USA, 1996. [Google Scholar]
- Solutions, D.D. ORCA3D User Manual; DRS Technology: Largo, FL, USA, 2015. [Google Scholar]
- Iqbal, K.S.; Bulian, G.; Hasegawa, K.; Karim, M.; Mashud, A. Interim guidelines for alternative assessment of the weather criterion Interim guidelines for alternative assessment of the weather criterion, 2006. J. Mar. Sci. Technol. 2008, 13, 282–290. [Google Scholar] [CrossRef]














| Parameter | Value | Unit |
|---|---|---|
| Length overall LOA | 2.18 | m |
| Beam B | 0.341 | m |
| Depth D | 0.19 | m |
| Unballasted vessel weight | 24.96 | kg |
| Ballasted vessel weight | 40 | kg |
| Displacement (ballast condition) | 0.029 | ton |
| Kyy | 1.09 | m |
| Kzz | 1.09 | m |
| Kxx | 0.12 | m |
| Cargo Tank Outer Dimensions | ||
| Length L | 0.49 | m |
| Width B | 0.26 | m |
| Width of one tank B | 0.13 | m |
| Depth D | 0.17 | m |
| Thickness t | 0.01 | m |
| Side | Load Horizontal Shift d (mm) | Load Moment per Displacement (mm) | Roll Angle |
|---|---|---|---|
| −150 | −78 | −5.9 | |
| Port side | −100 | −52 | −3.9 |
| −50 | −26 | −1.9 | |
| 0 | 0 | 0.1 | |
| 50 | 26 | 2.0 | |
| Starboard side | 100 | 52 | 4.0 |
| 150 | 78 | 6.0 |
| Forward | Aft | |||||||
|---|---|---|---|---|---|---|---|---|
| Condition | Port | Starboard | Port | Starboard | ||||
| Volume | Percentage | Volume | Percentage | Volume | Percentage | Volume | Percentage | |
| (L) | (%) | (L) | (%) | (L) | (%) | (L) | (%) | |
| 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 2 | 0 | 0 | 3 | 50 | 5.5 | 95 | 0 | 0 |
| 3 | 0 | 0 | 0.6 | 10 | 3 | 50 | 5.5 | 95 |
| 4 | 0.6 | 10 | 5.5 | 95 | 3 | 50 | 0.6 | 10 |
| 5 | 3 | 50 | 0 | 0 | 0.6 | 10 | 0.6 | 10 |
| 6 | 3 | 50 | 0 | 0 | 0 | 0 | 0.6 | 10 |
| 7 | 5.5 | 95 | 0 | 0 | 0 | 0 | 0 | 0 |
| 8 | 5.5 | 95 | 5.5 | 95 | 5.5 | 95 | 5.5 | 95 |
| 9 * | 5.5 | 95 | 5.5 | 95 | 5.5 | 95 | 5.5 | 95 |
| Condition | Initial Roll Angle | Natural Period (s) | Percentage Difference % |
|---|---|---|---|
| 3 | 16.6 | 1.68 | 6.13 |
| 1.58 | |||
| 5 | 12.6 | 1.26 | 10 |
| 1.14 | |||
| 7 | 13.6 | 1.30 | 6.35 |
| 1.22 | |||
| 8 | 16.6 | 1.62 | 25.3 |
| 2.09 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Igbadumhe, J.-F.; Sallam, O.; Fürth, M.; Feng, R. Experimental Determination of Non-Linear Roll Damping of an FPSO Pure Roll Coupled with Liquid Sloshing in Two-Row Tanks. J. Mar. Sci. Eng. 2020, 8, 582. https://doi.org/10.3390/jmse8080582
Igbadumhe J-F, Sallam O, Fürth M, Feng R. Experimental Determination of Non-Linear Roll Damping of an FPSO Pure Roll Coupled with Liquid Sloshing in Two-Row Tanks. Journal of Marine Science and Engineering. 2020; 8(8):582. https://doi.org/10.3390/jmse8080582
Chicago/Turabian StyleIgbadumhe, Jane-Frances, Omar Sallam, Mirjam Fürth, and Rihui Feng. 2020. "Experimental Determination of Non-Linear Roll Damping of an FPSO Pure Roll Coupled with Liquid Sloshing in Two-Row Tanks" Journal of Marine Science and Engineering 8, no. 8: 582. https://doi.org/10.3390/jmse8080582