
Abstract
Hysteresis is a nonlinear phenomenon which may cause inaccuracies and delay in control applications. Shape memory alloys (SMAs) have an asymmetric saturated hysteresis. In addition, the excitation frequency changes the hysteresis behavior of SMA-driven systems and makes them challenging to track reference inputs at different frequencies. In this study, a rate-dependent Prandtl–Ishlinskii model coupled with a deadband function is proposed to characterize the asymmetric and saturated hysteresis behavior as well as its rate-dependency. Unknown parameters of the model are identified using genetic optimization algorithm in MATLAB Toolbox based on measured data. The identified model is validated to consider the excitation frequency effect with a different measured data set. The inverse model is also proposed as a compensator to mitigate hysteresis nonlinearity effects especially the frequency effect in tracking control. Although the proposed compensator cannot fully compensate for hysteresis effects, it can reduce the input–output hysteresis. The proposed rate-dependent compensator as a feedforward controller combined with a proportional–integral–derivative (PID) controller as a feedback mitigates hysteresis effects. The PID controller is used to improve the accuracy of compensated system and remove the steady-state error. Experimental results illustrate that the proposed controller has a great accuracy in tracking control to consider the excitation frequency effect as well as the asymmetric saturated hysteresis.
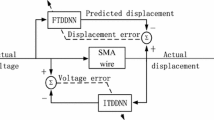
Graphic abstract






















Similar content being viewed by others


References
Evangeliou N, Tzes A (2017) Design and control of a robotic platform for dexterous minimally invasive surgical applications. Int Rev Autom Control 10(5):443–450
Park SJ, Park CH (2019) Suit-type wearable robot powered by shape-memory-alloy-based fabric muscle. Sci Rep 9(1):9157
Mirzakhani F, Ayati S, Fahimi P, Baghani M (2019) Online force control of a shape-memory-alloy-based 2 degree-of-freedom human finger via inverse model and proportional–integral–derivative compensator. J Intell Mater Syst Struct 30(10):1538–1548
Basaeri H, Zakerzadeh MR, Yousefi Koma A, Mohtasebi SS (2015) Design and aerodynamic analysis of a morphing wing with shape memory alloy actuator. Modares Mech Eng 15(5):60–70
Williams EA, Shaw G, Elahinia M (2010) Control of an automotive shape memory alloy mirror actuator. Mechatronics 20(5):527–534
Shakiba S, Abedi M, Vedadi A (2020) Behavioral modeling and experimental verification of a smart servomotor used in a thermal control louver of a satellite using dynamic neural network-based NARX. AUT J Mech Eng. https://doi.org/10.22060/ajme.2020.16517.5822
de Abreu GLCM, Maesta MF, Junior VL, Junior CDM, Faria CT, Inman DJ (2015) Active angular control of a sectioned airfoil using shape memory alloys and fuzzy controller. J Braz Soc Mech Sci Eng 37(5):1555–1567
Copaci D-S, Blanco D, Martin-Clemente A, Moreno L (2020) Flexible shape memory alloy actuators for soft robotics: modelling and control. Int J Adv Rob Syst 17(1):1729881419886747
Borges JM et al (2018) On the active control of a rotor-bearing system using shape memory alloy actuators: an experimental analysis. J Braz Soc Mech Sci Eng 40(5):269
Choudhary N, Kaur D (2016) Shape memory alloy thin films and heterostructures for MEMS applications: a review. Sens Actuators A 242:162–181
Lan C-C, Fan C-H (2010) An accurate self-sensing method for the control of shape memory alloy actuated flexures. Sens Actuators A 163(1):323–332
Gédouin P-A, Delaleau E, Bourgeot J-M, Join C, Arbab Chirani S, Calloch S (2011) Experimental comparison of classical PID and model-free control: Position control of a shape memory alloy active spring. Control Eng Pract 19(5):433–441
Lee J, Jin M, Ahn KK (2013) Precise tracking control of shape memory alloy actuator systems using hyperbolic tangential sliding mode control with time delay estimation. Mechatronics 23(3):310–317
Moghadam MH, Zakerzadeh MR, Ayati M (2019) Development of a cascade position control system for an SMA-actuated rotary actuator with improved experimental tracking results. J Braz Soc Mech Sci Eng 41(10):407
Elahinia MH, Seigler TM, Leo DJ, Ahmadian M (2004) Nonlinear stress-based control of a rotary SMA-actuated manipulator. J Intell Mater Syst Struct 15(6):495–508
Moghadam MH, Zakerzadeh MR, Ayati M (2019) Robust sliding mode position control of a fast response SMA-actuated rotary actuator using temperature and strain feedback. Sens Actuators A 292:158–168
Li J, Tian H (2018) Position control of SMA actuator based on inverse empirical model and SMC-RBF compensation. Mech Syst Signal Process 108:203–215
Sayyaadi H, Zakerzadeh MR (2012) Position control of shape memory alloy actuator based on the generalized Prandtl–Ishlinskii inverse model. Mechatronics 22(7):945–957
Zakerzadeh MR, Sayyaadi H (2013) Precise position control of shape memory alloy actuator using inverse hysteresis model and model reference adaptive control system. Mechatronics 23(8):1150–1162
Janaideh MA, Su C-Y, Rakheja S (2008) Development of the rate-dependent Prandtl–Ishlinskii model for smart actuators. Smart Mater Struct 17(3):035026
Al Janaideh M (2013) A time-dependent stop operator for modeling a class of singular hysteresis loops in a piezoceramic actuator. Physica B Condens Matter 413:100–104
Al Janaideh M, Krejci P (2013) Inverse rate-dependent Prandtl-Ishlinskii model for feedforward compensation of hysteresis in a piezomicropositioning actuator. IEEE/ASME Trans Mechatron 18(5):1498–1507
Aljanaideh O, Rakheja S, Su C-Y (2014) Experimental characterization and modeling of rate-dependent asymmetric hysteresis of magnetostrictive actuators. Smart Mater Struct 23(3):035002
Shakiba S, Yousefi-Koma A, Jokar M, Zakerzadeh MR, Basaeri H (2020) Modeling and characterization of the shape memory alloy–based morphing wing behavior using proposed rate-dependent Prandtl–Ishlinskii models. Proc Inst Mech Eng Part I J Syst Control Eng 234(4):550–565
Al Janaideh M, Aljanaideh O (2018) Further results on open-loop compensation of rate-dependent hysteresis in a magnetostrictive actuator with the Prandtl-Ishlinskii model. Mech Syst Signal Process 104:835–850
Aljanaideh O, Al-Tahat MD, Al Janaideh M (2016) Rate-bias-dependent hysteresis modeling of a magnetostrictive transducer. Microsyst Technol 22:883–892
Aljanaideh O, Al Janaideh M, Rakheja S, Su C-Y (2013) Compensation of rate-dependent hysteresis nonlinearities in a magnetostrictive actuator using an inverse Prandtl-Ishlinskii model. Smart Mater Struct 22(2):025027
Ang WT, Khosla PK, Riviere CN (2007) Feedforward controller with inverse rate-dependent model for piezoelectric actuators in trajectory-tracking applications. IEEE/ASME Trans Mechatron 12(2):134–142
Shakiba S, Zakerzadeh MR, Ayati M (2018) Experimental characterization and control of a magnetic shape memory alloy actuator using the modified generalized rate-dependent Prandtl–Ishlinskii hysteresis model. Proc Inst Mech Eng Part I J Syst Control Eng 232(5):506–518
Riccardi L, Naso D, Turchiano B, Janocha H, Palagachev DK (2012) On PID control of dynamic systems with hysteresis using a Prandtl–Ishlinskii model. In: 2012 American control conference (ACC). IEEE, pp 1670–1675
Al Janaideh M, Feng Y, Rakheja S, Tan Y, Su C-Y (2009) Generalized Prandtl–Ishlinskii hysteresis: modeling and robust control for smart actuators. In: Proceedings of the 48th IEEE conference on decision and control (CDC) held jointly with 2009 28th Chinese control conference. IEEE, pp 7279–7284
Al Janaideh M, Feng Y, Rakheja S, Su C-Y, Rabbath CA (2009) Hysteresis compensation for smart actuators using inverse generalized Prandtl–Ishlinskii model. In: 2009 American control conference. IEEE, pp 307–312
Funding
Funding was provided by Iran National Science Foundation (Grant No. 97018481).
Author information
Authors and Affiliations
Corresponding author
Additional information
Technical Editor: Pedro Manuel Calas Lopes Pacheco, D.Sc.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Shakiba, S., Yousefi-Koma, A. & Ayati, M. Tracking control of an SMA-driven actuator with rate-dependent behavior using an inverse model of hysteresis. J Braz. Soc. Mech. Sci. Eng. 42, 418 (2020). https://doi.org/10.1007/s40430-020-02486-0
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s40430-020-02486-0