
Abstract
In this paper we present a comprehensive mechanism for the emergence of strange attractors in a two-parametric family of differential equations acting on a three-dimensional sphere. When both parameters are zero, its flow exhibits an attracting heteroclinic network (Bykov network) made by two 1-dimensional connections and one 2-dimensional separatrix between two hyperbolic saddles-foci with different Morse indices. After slightly increasing both parameters, while keeping the one-dimensional connections unaltered, we focus our attention in the case where the two-dimensional invariant manifolds of the equilibria do not intersect. Under some conditions on the parameters and on the eigenvalues of the linearisation of the vector field at the saddle-foci, we prove the existence of many complicated dynamical objects, ranging from an attracting quasi-periodic torus to Hénon-like strange attractors, as a consequence of the Torus-Breakdown Theory. The mechanism for the creation of horseshoes and strange attractors is also discussed. Theoretical results are applied to show the occurrence of strange attractors in some analytic unfoldings of a Hopf-zero singularity.
Similar content being viewed by others


1 Introduction
1.1 Strange Attractors
Many aspects contribute to the richness and complexity of a dynamical system. One of them is the existence of strange attractors. Before going further, we introduce the following notion (adapted to the situation under consideration):
Definition 1
A (Hénon type) strange attractor of a two-dimensional dissipative diffeomorphism R defined in a Riemannian manifold, is a compact invariant set \(\Lambda \) with the following properties:
-
\(\Lambda \) equals the closure of the unstable manifold of a hyperbolic periodic point;
-
the basin of attraction of \(\Lambda \) contains an open set (and thus has positive Lebesgue measure);
-
there is a dense orbit in \(\Lambda \) with a positive Lyapounov exponent (exponential growth of the derivative along its orbit);
-
\(\Lambda \) is not hyperbolic.
A vector field possesses a strange attractor if the first return map to a cross section does.
The rigorous proof of the strange character of an invariant set is a great challenge and the proof of the persistence (in measure) of such attractors is a very involving task. Based on [12], Mora and Viana [37] proved the emergence of strange attractors in the process of creation or destruction of the Smale horseshoes that appear through a bifurcation of a tangential homoclinic point. In the present paper, rather than exhibit the existence of strange attractors, we explore a mechanism to guarantee the existence of such complex dynamics in the unfolding of a Bykov attractor, an expected phenomenon close to a \(\mathbb {SO}(2)\)-equivariant system. In the present paper, the abundance of strange attractors is a consequence of the Torus-breakdown Theory developed in [1, 3, 4, 8]. See also [51].
1.2 The Object of Study
Our starting point is a two-parametric differential equation \(\dot{x}=f_{(A, \lambda )}(x)\) defined in the three-dimensional sphere \({\mathbb {S}}^3\) with two saddle-foci sharing all the invariant manifolds of dimensions one and two for \(A=\lambda =0\), forming an attracting heteroclinic network \(\Gamma \) with a non-empty basin of attraction \(\mathcal {U}\). We study the global transition of the dynamics from \(\dot{x}=f_{(0,0)}(x)\) to a smooth two-parameter family \(\dot{x}=f_{(A,\lambda )}(x)\) that breaks the network (or part of it). Note that, for small perturbations, the set \(\mathcal {U}\) is still positively invariant. When \(A, \lambda \ne 0\), we assume that the one-dimensional connections persist, and the two dimensional invariant manifolds are generically transverse (either intersecting or not).
When \(\lambda >A\ge 0\), the two-dimensional invariant manifolds meet transversely, giving rise to a complex network, that consists of a union of Bykov cycles [17]. The dynamics in the maximal invariant set contained in \(\mathcal {U}\), contains, but does not coincide with, the suspension of horseshoes accumulating on the heteroclinic network described in [6, 30, 33, 43, 44]. In addition, close to the organising center, the flow contains infinitely many heteroclinic tangencies and attracting limit cycles with long periods, coexisting with sets with positive entropy, giving rise the so called quasi-stochastic attractors. All dynamical models with quasi-stochastic attractors were found, either analytically or by computer simulations, to have tangencies of invariant manifolds [24].
Recently, there has been a renewal of interest of this type of heteroclinic bifurcation in the reversible [21, 30, 36], equivariant [33, 43, 44] and conservative [13] contexts.
The novelty The case \(A>\lambda \ge 0\) corresponds to the situation where the two-dimensional invariant manifolds do not intersect, which has not been yet studied. Although the network \(\Gamma \) associated to the equilibria is destroyed, complex dynamics appears near the ghost of it. In the present article, it is shown that the perturbed system may manifest regular behavior corresponding to the existence of a smooth invariant torus, and may also have chaotic regimes. In the region of transition from regular behavior (attracting torus) to chaotic dynamics (suspended horseshoes), using known results about Arnold tongues, we prove the existence of lines with homoclinic tangencies to dissipative periodic solutions, responsible for the existence of persistent strange attractors nearby. This phenomenon has already been observed by [50, 51] in the context of non-autonomous differential equations. Our theoretical results may be applied in specific unfoldings of the Hopf-zero singularity (Case III of [25]).
1.3 This Article
We study the dynamics arising near a differential equation with a specific attracting heteroclinic network (Bykov attractor). We show that, when a two-dimensional connection is broken with a prescribed configuration, the dynamics undergoes a global transition from regular to chaotic dynamics.
We discuss the global bifurcations that occur as the parameters \((A,\lambda )\) vary. We complete our results by reducing our problem to that of a first return map having an attracting (non-contractible) curve and we study its generic bifurcations. As we will see in Sect. 9, the mechanism of the transition from regular dynamics to chaotic dynamics is not so standard as in [41, 53], where just saddle-node, periodic doubling and Newhouse bifurcations were involved in the the annihilation of hyperbolic horseshoes.
This article is organised as follows. In Sect. 2, after some basic definitions, we describe precisely our object of study and in Sect. 3 we review some literature related to it. In Sect. 4 we state the main results of the article. The coordinates and other notation used in the rest of the article are presented in Sect. 5. In Sects. 6–8, we prove the main results of the manuscript. In Sect. 9, we describe generic ways to break an attracting two-dimensional torus, which involve homoclinic tangencies produced by the stable and unstable manifolds of a dissipative saddle. These tangencies are the origin of persistent strange attractors. This mechanism is discussed in Sect. 10 for generic unfoldings of the Hopf-zero singularity (Case III of [25]). For the reader’s convenience, we have compiled at the end of the paper a list of definitions in a short glossary.
Throughout this paper, we have endeavoured to make a self contained exposition bringing together all topics related to the proofs. We have stated short lemmas and we have drawn illustrative figures to make the paper easily readable.
2 Setting
We will enumerate the main assumptions concerning the configuration of the network and the intersection of the invariant manifolds of the equilibria. We refer the reader to Appendix A for precise definitions.
2.1 The Organising Center
For \(\varepsilon >0\) small, consider the two-parameter family of \(C^3\)-smooth differential equations
where \({\mathbb {S}}^3\) denotes the unit three-sphere, endowed with the usual topology. Denote by \(\varphi _{(A, \lambda )}(t,x)\), \(t \in {\mathbb {R}}\), the associated flow,Footnote 1 satisfying the following hypotheses for \(A=\lambda =0\):
-
(P1) There are two different equilibria, say \(O_1\) and \(O_2\).
-
(P2) The spectrum of \(df_x\) is:
-
(P2a) \(E_1\) and \( -C_1\pm \omega _1 i \) where \(C_1>E_1>0, \quad \omega _1>0\), for \(x=O_1\);
-
(P2b) \(-C_2\) and \( E_2\pm \omega _2 i \) where \(C_2> E_2>0, \quad \omega _2>0\), for \(x=O_2\).
-
Thus the equilibrium \(O_1\) possesses a 2-dimensional stable and 1-dimensional unstable manifold and the equilibrium \(O_2\) possesses a 1-dimensional stable and 2-dimensional unstable manifold. For \(M\subset {\mathbb {S}}^3\), denoting by \(\overline{M}\) the topological closure of M, we also assume that:
-
(P3) The manifolds \(\overline{W^u(O_2)}\) and \(\overline{ W^s(O_1)}\) coincide and \(\overline{W^u(O_2)\cap W^s(O_1)}\) consists of a two-sphere (also called the 2D-connection).
and
-
(P4) There are two trajectories, say \(\gamma _1, \gamma _2\), contained in \(W^u(O_1)\cap W^s(O_2)\), one in each connected component of \({\mathbb {S}}^3\backslash \overline{W^u(O_2)}\) (also called the 1D-connections).

Sketch of the Bykov attractor \(\Gamma \) satisfying (P1)–(P4)
The two equilibria \(O_1\) and \(O_2\), the two-dimensional heteroclinic connection from \(O_2\) to \(O_1\) referred in (P3) and the two trajectories listed in (P4) build a heteroclinic network we will denote hereafter by \(\Gamma \). This network has two cycles and is illustrated in Fig. 1. This set has an attracting character [34], this is why it will be called a Bykov attractor.Footnote 2
Lemma 2.1
[34] The set \(\Gamma \) is asymptotically stable.
Therefore, we may find an open neighborhood \(\mathcal {U}\) of the heteroclinic network \(\Gamma \) having its boundary transverse to the flow of \(\dot{x}=f_{(0,0)}(x)\) and such that every solution starting in \(\mathcal {U}\) remains in it for all positive time and is forward asymptotic to \(\Gamma \).
2.2 Chirality
There are two different possibilities for the geometry of the flow around \(\Gamma \), depending on the direction in which trajectories turn around the one-dimensional heteroclinic connection from \(O_1\) to \(O_2\). To make this rigorous, we need some new concepts.
Let \(V_1\) and \(V_2\) be small disjoint neighborhoods of \(O_1\) and \(O_2\) with disjoint boundaries \(\partial V_1\) and \(\partial V_2\), respectively. These neighborhoods will be constructed with detail in Sect. 5. Trajectories starting at \(\partial V_1\backslash W^s(O_1)\) near \(W^s(O_1)\) go into the interior of \(V_1\) in positive time, then follow the connection from \(O_1\) to \(O_2\), go inside \(V_2\), and then come out at \(\partial V_2\) as in Fig. 2. Let \(\mathcal {Q}\) be a piece of trajectory like the one which has been constructed from \(\partial V_1\) to \(\partial V_2\). Now join its starting point to its end point by a line segment as in Fig. 2, forming a closed curve, that we call the loop of \(\mathcal {Q}\). The loop of \(\mathcal {Q}\) and the network \(\Gamma \) are disjoint closed sets.
Definition 2
[34] We say that the two saddle-foci \(O_1\) and \(O_2\) in \(\Gamma \) have the same chirality if the loop of every trajectory (starting near \(O_1\)) is linked to \(\Gamma \) in the sense that the two closed sets cannot be disconnected by an isotopy. Otherwise, we say that \(O_1\) and \(O_2\) have different chirality.
Our next assumption is topological and may be written as:
-
(P5) The saddle-foci \(O_1\) and \(O_2\) have the same chirality.

Illustration of Property (P5): the saddle-foci \(O_1\) and \(O_2\) have the same chirality
For \(r \ge 3\), denote by \(\mathfrak {X}^r({\mathbb {S}}^3)\), the set of \(C^r\) two-parameter families of vector fields on \({\mathbb {S}}^3\) satisfying Properties (P1)–(P5), endowed with the \(C^r\)-topology.
2.3 Perturbing Terms
With respect to the effect of the two parameters A and \(\lambda \) on the dynamics, we assume that:
-
(P6) For \(A> \lambda \ge 0\), the two trajectories within \(W^u(O_1)\cap W^s(O_2)\) persist.
By Kupka-Smale Theorem, generically the invariant two-dimensional manifolds \(W^u (O_2)\) and \(W^s (O_1)\) are transverse (intersecting or not). Throughout this article, we assume that:
-
(P7a) For \(A> \lambda \ge 0\), the two-dimensional manifolds \(W^u(O_2)\) and \(W^s(O_1)\) do not intersect.
and
-
(P8) The transitions along the connections \([O_1 \rightarrow O_2]\) and \([O_2 \rightarrow O_1]\) are given, in local coordinates, by the Identity map and by
$$\begin{aligned} (x,y)\mapsto (x,y+A + \lambda \Phi (x)) \end{aligned}$$respectively, where \(\Phi :{\mathbb {S}}^1 \rightarrow {\mathbb {S}}^1\) is a Morse function with at least two non-degenerate critical points (\({\mathbb {S}}^1={\mathbb {R}}\pmod {2\pi }\)). This assumption will be detailed later in Sect. 5.
For the moment, without loss of generality, let us also assume that \(\Phi (x)=\sin x\), \(x\in {\mathbb {S}}^1\), which has exactly two critical points.
2.4 Constants
For future use, we settle the following notation:
and
3 Overview
In this section, we review some known results about the bifurcation of codimension 2 under consideration, which are summarized in Table 1 and illustrated in Fig. 3.
3.1 Case 1: \(A=\lambda =0\)
The network \(\Gamma \) is asymptotically stable (see Lemma 2.1). The two-dimensional manifolds \(W^u(O_2)\) and \(W^s(O_1)\) coincide and the global attractor of \(f_{(0,0)}\) is made of the equilibria \(O_1, O_2\), and the two trajectories of \([O_1 \rightarrow O_2]\) together with a sphere which is both the stable manifold of \(O_1\) and the unstable manifold of \(O_2\). See Fig. 1.
This attractor, the so called Bykov attractor, has a finite number of moduli of stability and the points of its proper basin of attraction have historic behavior [18]. The coincidence of the two-dimensional invariant manifolds of \(O_1\) and \(O_2\) prevents visits to both cycles.
3.2 Case 2: \(A=0\) and \(\lambda >0\)
Let \(f_{(A, \lambda )}\in \mathfrak {X}^r({\mathbb {S}}^3)\) be a two-parameter family of vector fields satisfying (P1)–(P6) and for which Property (P7a) does not hold. Trajectories within \(W^u(O_1)\cap W^s(O_2)\) are kept but the manifolds \(W^u(O_2)\) and \(W^s(O_1)\) rearrange themselves, creating either transversal or tangential intersections. This upheaval causes an explosion of the non-wandering set of the flow, bringing forth a countable union of suspended horseshoes inside the set of trajectories that remain for all positive times in \(\mathcal {U}\). These horseshoes accumulate at the stable/unstable manifolds of the equilibria (cf. [17, 33]). Furthermore, for a sequence of positive parameters arbitrarily close to zero, say \((\lambda _j)_j\), the flow associated to \(f_{(0, \lambda _j)}\) exhibits homo and heteroclinic tangencies, sinks with long periods and strange attractors (cf. [35, 37, 38]).

Shape of the first hit of \(W^u(O_2)\)/\(W^s(O_1)\) to \(\Sigma \). The set \(\Sigma \) a cross section to the Bykov attractor \(\Gamma \) near the connection \(W^u(O_2) \cap W^s(O_1)\). The symbol \(\circ \) represents (transverse) heteroclinic connections from \(O_2\) to \(O_1\); the red line is the graph of \(\Phi (x)\) representing \(W^u (O_2)\cap \Sigma \); the grey line is \(W^s (O_1)\cap \Sigma \); the double bars mean that the sides are identified (Color figure online)
3.3 Case 3: \(\lambda>A>0\)
In this case, the manifolds \(W^u(O_2)\) and \(W^s(O_1)\) still meet transversely along at least two connections and thus the results of [33, 35, 44] still hold. The transverse intersection of the two-dimensional invariant manifolds of the two equilibria implies that the set of trajectories that remain for all time in a small neighborhood of the Bykov cycle contains a locally-maximal hyperbolic set admitting a complete description in terms of symbolic dynamics, reminiscent of the results of [24, 47]. An obstacle to the global symbolic description of these trajectories is the existence of tangencies that lead to the birth of stable periodic solutions, as described in [23, 24, 39].
3.4 Case 4: \(A>\lambda \ge 0\)
As far as we know, the cases \(A>\lambda =0\) and \(A>\lambda >0\) have not been studied. The goal of this article is to explore these cases where there are no cycles associated to \(O_1\) and \(O_2\). In contrast to Cases 2 and 3, where the involved bifurcations are related to horseshoe destruction, tangencies and Newhouse phenomena [35, 41], in Case 4 the bifurcations are connected with the Torus-Breakdown Theory [1, 3, 4, 8]. Hence, hereafter, we also assume that:
-
(P7b)\(A>\lambda \ge 0\) (or, equivalently, \(a =\frac{\lambda }{A}\in \,[\, 0,1\, [\, \)).
Under hypothesis (P8), one has (P7a) \(\Leftrightarrow \) (P7b), as noticed in Remark 5.2. When we refer to (P7) we refer one of the above.
For \(r \ge 3\), we denote by \(\mathfrak {X}^r_{\text {Byk}}({\mathbb {S}}^3)\subset \mathfrak {X}^r({\mathbb {S}}^3)\), the set of \(C^r\) two-parameter families of vector fields on \({\mathbb {S}}^3\) satisfying conditions (P1)–(P8). An explicit example with a two parameter polynomial differential equation satisfying (P1)–(P7) has been given in §4.1.3.2 of [5].
3.5 Digestive remark
Constants A and \(\lambda \) may be interpreted as follows: as depicted in Fig. 3, the first hit of \(W^u(O_2)\) and \(W^s(O_1)\) to \(\Sigma \) are two closed curves. In Case 4, according to our model, the distance between the two curves can be written as \(A + \lambda \Phi (x)\), \(x\in {\mathbb {S}}^1\), which may be seen as an approximation of the Melnikov function associated to the two-dimensional invariant manifolds [25, §4.5]. The constant A gives the averaged distance between the first hit of \(W^u(O_2)\) and \(W^s(O_1)\) in \(\Sigma \); the parameter \(\lambda \) describes fluctuations of \(W^u(O_2)\) in \(\Sigma \).
4 Main Results
Let \(\mathcal {T}\) be a neighborhood of the Bykov attractor \(\Gamma \), which exists for \(A=\lambda =0\). For \(\varepsilon >0\) small, let \(\left( f_{(A, \lambda )}\right) _{(A,\lambda )\in [0, \varepsilon ] ^2}\) be a two-parameter family of vector fields in \(\mathfrak {X}_{Byk}^3({\mathbb {S}}^3)\) satisfying conditions (P1)–(P8).
Theorem A
Let \(f_{(A, \lambda )} \in \mathfrak {X}_{Byk}^3({\mathbb {S}}^3)\). Then, there is \(\tilde{\varepsilon }>0\) (small) such that the first return map to a given cross section to \(\Gamma \) may be written (in local coordinates) by:
where
and the ellipsis stand for asymptotically small terms depending on x and y which converge to zero along their derivatives.
The proof of Theorem A is done in Sect. 6 by composing local and transition maps. Since \(\delta >1\), for A small enough, the second component of \(\mathcal {F}_{(A, \lambda )}\) is contracting and, under an additional hypothesis, the dynamics of \(\mathcal {F}_{(A, \lambda )}\) is dominated by the family of circle maps.
Theorem B
Let \(f_{(A, \lambda )} \in \mathfrak {X}_{Byk}^3({\mathbb {S}}^3)\). For \(A>0\) small enough, if \(\frac{\lambda }{A}<\frac{1}{\sqrt{1+K_\omega ^2}}\), then there is an invariant closed curve \(\mathcal {C}\subset \mathcal {D}\) as the maximal attractor for \(\mathcal {F}_{(A, \lambda )}\). This closed curve is not contractible on \(\mathcal {D}\).
The proof of Theorem is performed in Sect. 7 using the Afraimovich’s Annulus Principle [3]. The curve \(\mathcal {C}\) is globally attracting in the sense that, for every \(p\in \mathcal {D}\), there exist a point \(p_0\in \mathcal {C}\) such that
The attracting invariant curve for \(\mathcal {F}_{(A, \lambda )}\) is the graph of a smooth map and corresponds to an attracting two-torus for the flow of (2.1). Thus, in particular:
Corollary C
Let \(f_{(A, \lambda )} \in \mathfrak {X}_{Byk}^3({\mathbb {S}}^3)\). For \(A>0\) small enough, if either \(K_\omega >0\) or \(\lambda >0\) are sufficiently small, then:
-
(a) there is a persistent two-dimensional torus which is globally attracting.
-
(b) the dynamics of \(\mathcal {F}_{(A, \lambda )}\) induces on \(\mathcal {C}\) a circle map. In this case, for any given interval of unit length I, there is a positive measure set \(\Delta \subset I\) so that the rotation number of \(\mathcal {F}_{(A, \lambda )}|_\mathcal {C}\) is irrational if and only if \(a=\lambda /A \in \Delta \).
Proof
-
(a)
The existence of an invariant torus is a direct corollary of Theorem B. Since the torus is normally hyperbolic, its persistence follows from the theory for normally hyperbolic manifolds developed by Hirsch et al. [27].
-
(b)
The first part of this item follows from (a); the second part, concerning the rotation number on circle maps, may be found in Boyland [15] and Herman [26]. \(\square \)
The previous result implies the existence of a set of positive Lebesgue measure (in the bifurcation parameter \((A, \lambda )\)) for which the torus has a dense orbit, i.e. the whole torus is a minimal attractor.

Invariant attracting 2-torus and chaotic regions for the map \(\mathcal {F}_{(A, \lambda )}\) with respect to the parameters \(K_\omega \) and \(\frac{\lambda }{A}\)
Theorem D
Let \(f_{(A, \lambda )} \in \mathfrak {X}_{Byk}^3({\mathbb {S}}^3)\). For \(A>0\) small enough, if
then there exists a hyperbolic invariant closed subset \(\Lambda \) in a cross section to \(\Gamma \) such that \(\mathcal {F}_{(A, \lambda )}|_\Lambda \) is topologically conjugate to the Bernoulli shift of two symbols.
Remark 4.1
Under a stronger hypothesis, the conclusion of Theorem D may be rephrased as: \(\mathcal {F}_{(A, \lambda )}|_\Lambda \) is topologically conjugate to the Bernoulli shift of m symbols, with \(2 \le m \in {\mathbb {N}}\), giving rise to rotational horseshoes, a particular type of horseshoes characterized by Passegi et al. [42]—see Lemma 8.2.
As a corollary of Theorems B and D, in the bifurcation diagram \((a, K_\omega )=\left( \frac{\lambda }{A}, K_\omega \right) \), we may draw, in the first quadrant, two smooth curves, the graphs of \(h_1\) and \(h_2\) in Fig. 4, such that:
-
(1)
\(h_1(K_\omega )=\frac{1}{\sqrt{1+K_\omega ^2}}\) and \(f(K_\omega )= \frac{\exp \left( \frac{6\pi }{K_\omega \, }\right) -1}{\exp \left( \frac{6\pi }{K_\omega \, }\right) -1/6}\);
-
(2)
the region below the graph of \(h_1\) corresponds to flows having an invariant and attracting torus with zero topological entropy (regular dynamics);
-
(3)
the region above the graph of \(h_2\) corresponds to vector fields whose flows exhibit suspended horseshoes (chaotic dynamics).
The behavior of \(\mathcal {F}_{(A, \lambda )}\) is unknown for the parameter range between the graphs of f and g. Nevertheless, for \(K_\omega >0\) fixed (along the red dashed line in Fig. 4), the transition from the graph of \(h_1\) to that of \(h_2\) may be explained via Arnold tongues associated to the torus bifurcations [1, 7, 8]. In particular, in the bifurcation diagram \(\left( A, \frac{\lambda }{A}\right) \), there is a set with positive Lebesgue measure for which the family (2.1) exhibits strange attractors.
Theorem E
Fix \(K_\omega ^0>0\). In the bifurcation diagram \(\left( A, \frac{\lambda }{A}\right) \), where \((A, \lambda )\) is such that \(h_1(K_\omega ^0)<\frac{\lambda }{A}<h_2(K_\omega ^0)\), there exists a positive measure set \(\Delta \) of parameter values, so that for every \(a\in \Delta \), \(\mathcal {F}_{(A, \lambda )}\) admits a strange attractor (of Hénon-type) with an ergodic SRB measure.
The proof of Theorem E is a consequence of the Torus-Breakdown Theory [1, 3, 4, 8] combined with the results by Mora and Viana [37]. A discussion of these results will be performed in Sect. 9.
4.1 An Application: Strange Attractors in the Unfolding of a Hopf-Zero Singularity
By applying the previous theory, we may show the occurrence of strange attractors in a specific case of unfoldings of a Hopf-zero singularity (Type I of [11], Case III of [25]).Footnote 3 Since the hypotheses are very technical, we decide to postpone the precise result to Sect. 10.
5 Local and Transition Maps
In this section we will analyze the dynamics near the Bykov attractor \(\Gamma \) through local maps, after selecting appropriate coordinates in neighborhoods of the saddle-foci \(O_1\) and \(O_2\) (see Fig. 5), as done in [40].

Local cylindrical coordinates inside \(V_1\) and \(V_2\) and near \(O_1\) and \(O_2\), respectively
5.1 Local Coordinates
In order to describe the dynamics around the cycles of \(\Gamma \), we use the local coordinates near the equilibria \(O_1\) and \(O_2\) introduced in [35]. See also Ovsyannikov and Shilnikov [40].
In these coordinates, we consider cylindrical neighborhoods \(V_1\) and \(V_2\) in \({{\mathbb {R}}}^3\) of \(O_1 \) and \(O_2\), respectively, of radius \(\rho =\tilde{\varepsilon }>0\) and height \(z=2\tilde{\varepsilon }\)—see Fig. 5. After a linear rescaling of the variables, we may also assume that \(\tilde{\varepsilon }=1\). Their boundaries consist of three components: the cylinder wall parametrised by \(x\in {\mathbb {R}}\pmod {2\pi }\) and \(|y|\le 1\) with the usual cover
and two discs, the top and bottom of the cylinder. We take polar coverings of these disks
where \(0\le r\le 1\) and \(\varphi \in {\mathbb {R}}\pmod {2\pi }\). The local stable manifold of \(O_1\), \(W^s_{\text {loc}}(O_1)\), corresponds to the circle parametrised by \( y=0\). In \(V_1\) we use the following terminology suggested in Fig. 5:
-
\({\text {In}}(O_1)\), the cylinder wall of \(V_1\), consisting of points that go inside \(V_1\) in positive time;
-
\({\text {Out}}(O_1)\), the top and bottom of \(V_1\), consisting of points that go outside \(V_1\) in positive time.
We denote by \({\text {In}}^+(O_1)\) the upper part of the cylinder, parametrised by (x, y), \(y\in \, ]\, 0,1]\) and by \({\text {In}}^-(O_1)\) its lower part.
The cross-sections obtained for the linearisation around \(O_2\) are dual to these. The set \(W^s_{\text {loc}}(O_2)\) is the z-axis intersecting the top and bottom of the cylinder \(V_2\) at the origin of its coordinates. The set \(W^u_{\text {loc}}(O_2)\) is parametrised by \(y=0\), and we use:
-
\({\text {In}}(O_2)\), the top and bottom of \(V_2\), consisting of points that go inside \(V_2\) in positive time;
-
\({\text {Out}}(O_2)\), the cylinder wall of \(V_2\), consisting of points that go inside \(V_2\) in negative time, with \({\text {Out}}^+(O_2)\) denoting its upper part, parametrised by (x, y), \(y\in \, ] 0,1]\) and \({\text {Out}}^-(O_2)\) its lower part.
We will denote by \(W^u_{{\text {loc}}}(O_2)\) the portion of \(W^u(O_2)\) that goes from \(O_2\) up to \({\text {In}}(O_1)\) not intersecting the interior of \(V_1\) and by \(W^s_{{\text {loc}}}(O_1)\) the portion of \(W^s(O_1)\) outside \(V_2\) that goes directly from \({\text {Out}}(O_2)\) into \(O_1\). The flow is transverse to these cross-sections and the boundaries of \(V_1\) and of \(V_2\) may be written as the closure of \({\text {In}}(O_1) \cup {\text {Out}}(O_1)\) and \({\text {In}}(O_2) \cup {\text {Out}}(O_2)\), respectively. The orientation of the angular coordinate near \(O_2\) is chosen to be compatible with the direction induced by the angular coordinate in \(O_1\).
5.2 Local Maps Near the Saddle-Foci
Following [20, 40], the trajectory of a point (x, y) with \(y>0\) in \({\text {In}}^+(O_1)\), leaves \(V_1\) at \({\text {Out}}(O_1)\) at
where \(S_1\), \(S_2\) are smooth functions which depend on A, \(\lambda \) and satisfy:
The numbers C, \(\sigma \) are positive constants and \(k, l, m_1, m_2\) are non-negative integers. Similarly, a point \((r,\phi )\) in \({\text {In}}(O_2) \backslash W^s_{{\text {loc}}}(O_2)\), leaves \(V_2\) at \({\text {Out}}(O_2)\) at
and \(R_1\), \(R_2\) satisfy a condition similar to (5.2). The terms \(S_1\), \(S_2\), \(R_1\), \(R_2\) correspond to asymptotically small terms that vanish when y and r go to zero. A better estimate under a stronger eigenvalue condition has been obtained in [28, Prop. 2.4].
5.3 The Transitions
The coordinates on \(V_1\) and \(V_2\) are chosen so that \([O_1\rightarrow O_2]\) connects points with \(z>0\) (resp. \(z<0\)) in \(V_1\) to points with \(z>0\) (resp. \(z<0\)) in \(V_2\). Points in \({\text {Out}}(O_1) \setminus W^u_{{\text {loc}}}(O_1)\) near \(W^u(O_1)\) are mapped into \({\text {In}}(O_2)\) along a flow-box around each of the connections \([O_1\rightarrow O_2]\). Assuming (P8), the transition
does not depend neither on \(\lambda \) nor A and is the Identity map, a choice compatible with Hypothesis (P4). Using a more general form for \(\Psi _{1 \rightarrow 2}\) would complicate the computations without any change in the final results. Denote by \(\eta \) the map
Omitting the higher order terms which appear in (5.1) and (5.3), we infer that, in local coordinates, for \(y>0\) we have
with
A similar expression is valid for \(y<0\), after suitable changes in the sign of y. Using (P7) and (P8), for \(A> \lambda \ge 0\), we still have a well defined transition map
that depends on the parameters \(\lambda \) and A, given by (see Fig. 6)
Remark 5.1
Our study is based on a model satisfying Hypothesis (P8). It governs the transition maps along the heteroclinic connections, being necessary to make precise computations in Sects. 6–8. The part concerning the transition along \([O_2 \rightarrow O_1]\), \(\Psi _{2 \rightarrow 1}^{(A, \lambda )}\), corresponds to the expected unfolding from the coincidence of the two-dimensional invariant manifolds at \(f_{(0,0)}\); this is also suggested in Figure 4 of [22].
Remark 5.2
We are now in conditions to explain why, under (P8), the hypotheses (P7a) and (P7b) are equivalent. Indeed, as suggested by Fig. 6, the sets \(W^u_{\text {loc}}(O_2)\cap {\text {Out}}(O_2)\) and \(W^s_{\text {loc}}(O_1)\cap {\text {In}}(O_1)\) are parametrised by \(y=0\). Assuming (P8), the set
is the graph of \(A+\lambda \sin (x)\), \(x\in {\mathbb {S}}^1\). Since \(A, \lambda \ge 0\), the two-dimensional manifolds \(W^u_{\text {loc}}(O_2)\) and \(W^s_{\text {loc}}(O_1)\) do not intersect if and only if
In particular, \(A>\lambda \ge 0\) i.e. \( \lambda /A \in [\, 0,1[\).

Geometry of the global map \(\Psi _{2 \rightarrow 1}^{(A, \lambda )}\). For \(A>\lambda \ge 0\), \(W^s_{\text {loc}}(O_1)\) intersects the wall \({\text {Out}}(O_2)\) of the cylinder \(V_2\) and \(W^u_{\text {loc}}(O_2)\) intersects the wall \({\text {In}}(O_1)\) of the cylinder \(V_1\) on closed curves given, in local coordinates, by the graph of a \(2\pi -\)periodic function of sinusoidal type. Compare with Figure 4 of [22]
To simplify the notation, in what follows we will sometimes drop the subscript \((A, \lambda )\), unless there is some risk of misunderstanding.
6 Proof of Theorem A
The proof of Theorem A is straightforward by composing the local and transition maps constructed in Sect. 5. Let
be the first return map to \({\text {Out}}(O_2)\), where \(\mathcal {D}\) is the set of initial conditions \((x,y) \in {\text {Out}}(O_2)\) whose solution returns to \({\text {Out}}(O_2)\). Composing \(\eta \) (5.4) with \(\Psi _{2 \rightarrow 1}\) (5.6), the analytic expression of \(\mathcal {F}_{(A, \lambda )}\) is given by:
and Theorem A is proved.
The following technical result will be useful in the sequel.
Lemma 6.1
For \(A>0\) small enough, the map \(\mathcal {F}_2^{(A, \lambda )}\) is a contraction in the variable y.
Proof
Since \(\delta >1\) and \(y\in [0,1]\), we may write:
and we get the result. \(\square \)
7 Proof of Theorem B
To prove the existence of an invariant and attracting smooth closed curve for \(\mathcal {F}_{(A, \lambda )}\), we make use if the Afraimovich Annulus Principle [3, 4]. We start by proving the existence of a flow-invariant annulus in \({\text {Out}}^+(O_2)\) in Sect. 7.1, then we check the conditions required by the Annulus Principle (one by one) in Sect. 7.2.
7.1 The Existence of an Annulus
Let
In what follows, if \(\mathcal {X}\subset {\text {Out}}(O_2)\), let \( {\mathop {\mathcal {X}}\limits ^{\ \circ }}\) denote the topological interior of \(\mathcal {X}\).
Lemma 7.1
There exists \(A_0 \in \, ]\, 0, \varepsilon \, [\) such that: if \(A \in \, \, ] \, 0,A_0\, ]\) and \(\lambda \in \, [\, 0, A\, [\) then \(\mathcal {F}_{(A, \lambda )} (\mathcal {B})\subseteq \ {\mathop {\mathcal {B}}\limits ^{\ \circ }}\).
Proof
If \((x,y)\in \mathcal {B}\), we have:
In particular, there exists \(A_1>0\) such that:
Analogously, if \((x,y)\in \mathcal {B}\), we may write:
Therefore, there exists \(A_2>0\) such that:
Therefore, the region \(\mathcal {B}\) is forward invariant for all \(A \in \,\, ]\, 0, A_0]\) and \(\lambda \in [\,0, A\, [\), where \(A_0 =~ \min \{A_1, A_2\}\). \(\square \)
We recall the annulus principle (version [4]), adapted to our purposes. Let us introduce the following notation: for a vector-valued or matrix-valued function \(\mathbf{F} (x,y)\), define
where \(\Vert \star \Vert \) is the standard Euclidian norm.
Theorem 7.2
[4] Let \(G(x,y)=\left( x+g_1(x,y),g_2(x,y) \right) \) be a \(C^1\) map, with \(x\in {\mathbb {R}}\pmod {2\pi }\), defined on the annulus
where \(0<a<b\), and satisfying:
-
(1)
\(g_1\) and \(g_2\) are \(2\pi \)-periodic in x and smooth;
-
(2)
\(G (\mathcal {B})\subseteq \ {\mathop {\mathcal {B}}\limits ^{\ \circ }}\);
-
(3)
\(0<\displaystyle \left\| 1+ \frac{\partial g_1}{\partial x}\right\| <1\);
-
(4)
\(\displaystyle \left\| \frac{\partial g_2}{\partial y}\right\| <1\) (ie, the map \(g_2\) is a contraction in y);
-
(5)
\(\displaystyle 2 \sqrt{\left\| 1+\frac{\partial g_1}{\partial x}\right\| ^{-2} \left\| \frac{\partial g_2}{\partial x} \right\| \left\| \frac{\partial g_1}{\partial y} \right\| } < 1- \left\| 1+\frac{\partial g_1}{\partial x}\right\| ^{-1} \left\| \frac{\partial g_2}{\partial y}\right\| \);
-
(6)
\(\displaystyle \left\| 1+\frac{\partial g_1}{\partial x}\right\| +\left\| \frac{\partial g_2}{\partial y}\right\| <2\),
then the maximal attractor in \(\mathcal {B}\) is an invariant closed curve, the graph of a \(2\pi \)-periodic, \(C^1\) function \(y=h(x)\).
7.2 Proof of Theorem B
In this section, we prove Theorem B as an application of Theorem 7.2. Let us define:
where
whose derivatives may be written as:
We state and prove an auxiliary result that will be used in the sequel.
Lemma 7.3
If \(0<\lambda <\frac{A}{\sqrt{1+K_\omega ^2}}\), the range of \(\frac{\partial \mathcal {F}_1^{(A, \lambda )}}{\partial x}\) is \(]\,0,1\, [\).
Proof
First note that
Taking \(a=\frac{\lambda }{A}\), we get:
Therefore \(\frac{\partial ^2 \mathcal {F}_1^{(A, \lambda )}(x,y)}{\partial ^2 x}=0\) if and only if \(a=0\) or \(\sin (x)=-a\). Let us define \(x^\star \in [\pi , 3\pi /2]\) such that \(\sin (x^\star )=-a\). Therefore:
\(\square \)
In order to prove Theorem B, we check one by one the hypotheses of Theorem 7.2, putting all pieces together.
-
(1)
It is easy to see to see that \(g_1(x,y)= \mathcal {F}_1^{(A, \lambda )}(x,y)-x\) and \(g_2(x,y)= \mathcal {F}_2^{(A, \lambda )}(x,y)\) are \(2\pi \)-periodic in the variable x and smooth in \(\mathcal {B}\).
-
(2)
This item follows from Lemma 7.1, where \(a= A^\delta \left( 1-\frac{\lambda }{A}\right) ^\delta \) and \(b= 2 A^\delta \left( 1+\frac{\lambda }{A}\right) ^\delta \).
-
(3)
Using Lemma 7.3, we know that \(0<\left\| 1+ \frac{\partial g_1}{\partial x}\right\| <1\) if \(a= \frac{\lambda }{A}\in [0, \frac{1}{\sqrt{1+K_\omega ^2}}[\). In particular, under the same condition, we get \(\left\| 1+ \frac{\partial g_1}{\partial x}\right\| ^{-1}<\infty \).
-
(4)
The proof of this item follows from Lemma 6.1. Indeed,
$$\begin{aligned} \left\| \frac{\partial g_2(x,y)}{\partial y } \right\|= & {} \sup _{(x,y)\in \mathcal {B}} \, |\delta (y + A + \lambda \sin x)^{\delta -1} |= O(A^{\delta -1})<1. \end{aligned}$$ -
(5)
Since
$$\begin{aligned} \frac{\partial g_1(x,y)}{\partial y }= & {} \frac{-K_\omega }{y+A+\lambda \sin x} = O\left( \frac{1}{A}\right) \qquad \text {and}\\ \frac{\partial g_2(x,y)}{\partial x}= & {} \delta \lambda (y+A+\lambda \sin x)^{\delta -1} \cos x \\\le & {} \delta A (y+A+\lambda \sin x)^{\delta -1} \\= & {} O\left( A^{\delta }\right) , \end{aligned}$$this implies that:
$$\begin{aligned} \sqrt{\left\| 1+\frac{\partial g_1}{\partial x}\right\| ^{-2} \left\| \frac{\partial g_2}{\partial x}\right\| \left\| \frac{\partial g_1}{\partial y}\right\| }= & {} \left\| 1+ \frac{\partial g_1}{\partial x}\right\| ^{-1} O(A^{\delta /2}) \, O(A^{-1/2})=O\left( A^{\frac{\delta -1}{2}}\right) . \end{aligned}$$Combining now
$$\begin{aligned} 1- \left\| 1+\frac{\partial g_1}{\partial x}\right\| ^{-1}\left\| \frac{\partial g_2}{\partial y}\right\|= & {} 1- O\left( A^{\delta -1}\right) \end{aligned}$$with
$$\begin{aligned} \sqrt{\left\| 1+\frac{\partial g_1}{\partial x}\right\| ^{-2} \left\| \frac{\partial g_2}{\partial x}\right\| \left\| \frac{\partial g_1}{\partial y}\right\| } =O\left( A^{\frac{\delta -1}{2}}\right) , \end{aligned}$$item (5) follows for \(A>0\) sufficiently small.
-
(6)
Using again Lemmas 6.1 and 7.3, we get:
$$\begin{aligned} \left\| 1+\frac{\partial g_1}{\partial x}\right\| + \left\| \frac{\partial g_2}{\partial y}\right\|<1+ O(A^{\delta -1})<2 \end{aligned}$$

Illustration of Theorem B: for \(A>0\) small enough, if \(\lambda <\frac{A}{\sqrt{1+K_\omega ^2}}\), then there is an invariant closed curve \(\mathcal {C}\subset {\text {Out}}^+(O_2)\) as the maximal attractor of \(\mathcal {F}_{(A, \lambda )}\)
This ends the proof of the existence of an attracting curve for the dynamics of \( \mathcal {F}_{(A, \lambda )}\), provided \(A>0\) is sufficiently small and \(\frac{\lambda }{A}<\frac{1}{\sqrt{1+K_\omega ^2}}\). This curve, shown is Fig. 7, is not contractible because it is the graph of a \(C^1\)-smooth map h.
7.3 Geometric Interpretation
Condition \(\lambda <\frac{A}{\sqrt{1+K_\omega ^2}}\) implies that the image of the annulus \(\mathcal {B}\) under \(\mathcal {F}_{(A, \lambda )}\) is also an annulus bounded by two curves without folds. The subsequent image of this annulus is self-alike too, and so on. As a result, we obtain a sequence of embedded annuli; the contraction in the y-variable (Lemma 6.1) guarantees that these annuli intersect in a single and smooth attracting closed curve.
8 Proof of Theorem D
In this section, under an appropriate hypothesis, we prove the existence of two rectangles whose image under \(\mathcal {F}_{(A, \lambda )}\) overlaps with \({\text {Out}}(O_2)\) at least twice. Therefore, we obtain a construction similar to the hyperbolic Smale horseshoe: a small tubular neighborhood of \(y=0\) (in \({\text {Out}}(O_2)\)) is folded and mapped into itself.
8.1 Stretching the Angular Component
The first technical result, illustrated in Fig. 8, says that the image under \(\mathcal {F}_1^{(A, \lambda )}\) of the segment parametrised by
(\(y_0 \in [0, 1]\)) is monotonic, meaning that there are no folds. Here we use the hypothesis that the map \(\Phi (x)=\sin x\) has non-degenerate critical points.
Lemma 8.1
For any \(y_0 \in [0, 1]\), the angular map \(\mathcal {F}_1^{(A, \lambda )}(x,y_0)\) is an increasing map for \(x\in \, \, ]\, \pi /2, 3\pi /2 \, [\).
Proof
Let \(y_0 \in [0, 1]\). One knows that:
Since \(\frac{\lambda }{A}\ll 1\) and \(\frac{\lambda }{A} \cos x<0\) in \(]\, \pi /2, 3\pi /2\,[\), we may conclude that:
and the result follows. \(\square \)
From now on, for \(n\in {\mathbb {N}}\backslash \{1\}\), let \(\theta _n=\pi +\arcsin (c_n)\) where \(c_n=\frac{1}{2(n+1)}\). It is easy to see that \(\theta _n \in \, \, ]\, \pi , 3\pi /2\, [\) and \(\sin (\theta _n)=\sin (\pi +\arcsin (c_n))=-c_n<0.\)
Therefore, for all \(y\in [0,1]\) and \(\delta \in [\, 0, 3\pi /2 -\theta _n\, [\, \, \subset \, \, ]\, 0, \pi /2\, [\), we have:

For \(y_0\in [0,1]\), the image under \(\mathcal {F}_{(A, \lambda )}\) of the segment \([\pi , 3\pi /2] \times \{y_0\}\) is a curve (without folds) intersecting twice the rectangle \(R= [\pi , 3\pi /2] \times [-1,1] \subset {\text {Out}}(O_2).\) There are two sub-segments (\(I_1\) and \(I_2\)) which are stretched by \(\mathcal {F}_{(A, \lambda )}\) along R
For each \(n\in {\mathbb {N}}\backslash \{1\}\), \(\delta \in \, ]\,0, \pi /2\, [\), \(a=\frac{\lambda }{A}\in \, [0,1[\) and \(A\ne 0\), define the map
Lemma 8.2
For \(n\in {\mathbb {N}}\backslash \{1\}\), \(\frac{\lambda }{A} > \frac{\exp \left( \frac{\pi }{K_\omega \, c_n}\right) -1}{\exp \left( \frac{\pi }{K_\omega \, c_n}\right) -c_n}\) if and only if \(P\left( 0, \frac{\lambda }{A} \right) >\frac{\pi }{c_n}\).
Proof
Taking \(a= \lambda / A\), we may write:
\(\square \)
Using Lemma 8.2, by continuity of P with respect to \(\delta \), there exists \(\delta _0<3\pi /2 -\theta _n\) such that
Taking into account (8.1), the condition \(3\pi /2- \delta -\theta _n \in [0, \pi /2],\) and (8.3), we conclude that there exists \(\delta _0<3\pi /2 -\theta _n\) such that
Then, as suggested in Fig. 8, the image, under \(\mathcal {F}_{(A, \lambda )}\), of the segment \([\pi , 3\pi /2] \times \{y_0\}\) is a curve (without folds) intersecting n times the rectangle
In particular, we may find n disjoint intervals defined by \(I_n=[x_{2n-1}, x_{2n}]\) such that
for which we define n non-empty compact and disjoint subsets \(H_n\), on which the map \(\mathcal {F}_{(A, \lambda )}|_{H_1\cup \cdots \cup H_n}\) is topologically conjugate to a Bernoulli shift with n symbols. The construction of this horseshoe (\(n=2\)) is the goal of the Sect. 8.2.
8.2 The Construction of the Topological Horseshoe
We now recall the main steps of the construction of the horseshoes (with \(n=2\)) which are \(\mathcal {F}_{(A, \lambda )} \)–invariant. The argument uses the generalized Conley-Moser conditions [25, 32, 46, 52] to ensure the existence for \(\frac{\lambda }{A} > \frac{\exp \left( \frac{\pi }{K_\omega \, c_2}\right) -1}{\exp \left( \frac{\pi }{K_\omega \, c_2}\right) -c_2}\), of an invariant set \(\Lambda \subset {\text {Out}}^+(O_2)\) topologically conjugated to a Bernoulli shift with 2 symbols. As suggested in Fig. 9 (right), in this subsection, we decided to flip coordinates \((x,y) \leftrightarrow (y,x)\) in \(\mathcal {D}\subset {\text {Out}}(O_2)\) because doing so, we get a high similarity of the present situation to that of [44, 52], where we address the reader for details.
Given a rectangular region \(\mathcal {R}\) in \({\text {Out}}(O_2)\), parameterised by a rectangle \([w_1,w_2]\times [z_1, z_2]\), a horizontal strip in \(\mathcal {R}\) is a set
where \(u_1,u_2: [w_1,w_2] \rightarrow [z_1,z_2]\) are Lipschitz functions such that \(u_1(y)<u_2(y)\). The horizontal boundaries of a horizontal strip are the graphs of the maps \(u_i\); the vertical boundaries are the lines \(\{w_i\} \times [u_1(w_i),u_2(w_i)]\). In an analogous way, we define a vertical strip across \({\text {Out}}(O_2)\), a vertical rectangle, with the roles of x and y reversed.

Two rectangles whose image under \(\mathcal {F}_{(A, \lambda )}\) overlaps with \({\text {Out}}(O_2)\) at least twice, giving rise to a Smale horseshoe—see Fig. 10d
We may deduce (by construction) that:
-
(1)
For \(i=1,2\), as suggested in Fig. 9, the horizontal strip
$$\begin{aligned} H_i= \{(y,x)\in \mathcal {D}: x\in I_i\}. \end{aligned}$$is mapped (homeomorphically) by \(\mathcal {F}_{(A, \lambda )}\) into a vertical strip across \( R\subset {\text {Out}}(O_2)\).
-
(2)
\(\mathcal {F}_{(A, \lambda )}(H_1)\cap \mathcal {F}_{(A, \lambda )}(H_2)=\emptyset \) because \(\mathcal {F}_{(A, \lambda )}\) is a diffeomorphism, where it is well defined.
-
(3)
\(\mathcal {F}_{(A, \lambda )}(H_1)\) and \(\mathcal {F}_{(A, \lambda )}(H_2)\) have full intersections with \(H_1\) and \(H_2\) (i.e. the vertical boundaries of \(\mathcal {F}_{(A, \lambda )}(H_1)\) and \(\mathcal {F}_{(A, \lambda )}(H_2)\) cross both the horizontal and vertical boundaries of \(H_1\) and \(H_2\)) because of Lemma 8.2 and subsequent remark;
-
(4)
For \(i, j=1,2\), defining \(V_{ji}: =\mathcal {F}_{(A, \lambda )}(H_i) \cap H_j\), \(H_{ij}: = \mathcal {F}_{(A, \lambda )}^{-1}(V_{ji}) =H_i \cap \mathcal {F}_{(A, \lambda )}^{-1}(H_j)\) and denoting by \(\partial _v V_{ji}\) the vertical boundaries of \(V_{ji}\), we get, by construction, that:
-
(1)
\(\partial _v V_{ji} \subset \partial _v \mathcal {F}_{(A, \lambda )}(H_i)\);
-
(2)
the map \(\mathcal {F}_{(A, \lambda )}\) maps \(H_{ij}\) homomorphically onto \(V_{ji}\);
-
(3)
\(\mathcal {F}_{(A, \lambda )}^{-1}(\partial _v V_{ji}) \subset \partial _v H_i\).
-
(1)
Using [52], we may conclude that there exists a \(\mathcal {F}_{(A, \lambda )}-\)invariant set of initial conditions
on which the map \(\mathcal {F}_{(A, \lambda )}|_\Lambda \) is topologically conjugate to a Bernoulli shift with two symbols.
8.3 Hyperbolicity
To prove the hyperbolicity of \(\Lambda \) with respect to the map \(\mathcal {F}_{(A, \lambda )}\), we apply the following result due to Afraimovich et al. [2].
Theorem 8.3
[2] Let \(H:U \rightarrow {\mathbb {R}}^2\) be a \(C^1\) map where U is an open convex subset of \({\mathbb {R}}^2\) such that \(H(x,y):=(F_1(x,y), F_2(x,y))\), where \(x, y \in {\mathbb {R}}\). If:
-
(1)
\(\left\| \frac{\partial F_2}{\partial y}\right\| <1\)
-
(2)
\(\left\| \left( \frac{\partial F_1}{\partial x}\right) ^{-1}\right\| <1\);
-
(3)
\(1-{\left\| \frac{\partial F_2}{\partial y}\right\| }{\left\| \left( \frac{\partial F_1}{\partial x}\right) ^{-1}\right\| }>2\sqrt{{\left\| \frac{\partial F_2}{\partial x}\right\| } \left\| \frac{\partial F_1}{\partial y}\right\| \left\| \left( \frac{\partial F_1}{\partial x}\right) ^{-1}\right\| } \)
-
(4)
\(\left( 1-\left\| \frac{\partial F_2}{\partial y}\right\| \right) \left( 1-\left\| \frac{\partial F_1}{\partial x}\right\| ^{-1}\right) >{\left\| \frac{\partial F_2}{\partial x}\right\| \left\| (\frac{\partial F_1}{\partial x})^{-1}\right\| } \left\| \frac{\partial F_1}{\partial y}\right\| \),
then any compact invariant set \(\Lambda \subset U\) is hyperbolic.
To finish the proof of Theorem D, we check one by one the hypotheses of Theorem 8.3, when applied to the compact set \(\Lambda \subset {\text {Out}}^+(O_2)\), where \(F_1= \mathcal {F}_1^{(A, \lambda )}\) and \(F_2= \mathcal {F}_2^{(A, \lambda )}\).
-
(1)
The proof follows from Lemma 6.1.
-
(2)
One knows that:
$$\begin{aligned} \left\| \left( \frac{\partial F_1}{\partial x}\right) \right\|= & {} \sup _{(x, y)\in \Lambda } \left| \left( \frac{\partial F_1}{\partial x}\right) \right| \\= & {} \sup _{(x, y)\in \Lambda } \left| 1-K_\omega \frac{\frac{\lambda }{A} \cos x}{1+\frac{\lambda }{A}\sin x} + o(1)\, y \right| >1 \end{aligned}$$The last inequality follows from the fact that \(\pi<x<\frac{3\pi }{2}\) (see (8.4)) in \(\Lambda \subset H_1\cup H_2\).
-
(3)
By Lemma 6.1, it follows that:
$$\begin{aligned} 1-{\left\| \frac{\partial F_2}{\partial y}\right\| }{\left\| \left( \frac{\partial F_1}{\partial x}\right) ^{-1}\right\| }= 1- O(A^{\delta -1}){\left\| \left( \frac{\partial F_1}{\partial x}\right) ^{-1}\right\| } \end{aligned}$$On the other hand, we may write:
$$\begin{aligned} 2\sqrt{{\left\| \frac{\partial F_2}{\partial x}\right\| } \left\| \frac{\partial F_1}{\partial y}\right\| \left\| \left( \frac{\partial F_1}{\partial x}\right) ^{-1}\right\| } = 2 \sqrt{\left\| \left( \frac{\partial F_1}{\partial x}\right) ^{-1}\right\| }\,\,O(A^{\frac{\delta -1}{2}}) \end{aligned}$$ -
(4)
Similarly, we write:
$$\begin{aligned} \left( 1-\left\| \frac{\partial F_2}{\partial y}\right\| \right) \left( 1-\left\| \frac{\partial F_1}{\partial x}\right\| ^{-1}\right) = (1-O(A^\delta ))\left( 1-\left\| \frac{\partial F_1}{\partial x}\right\| ^{-1}\right) \end{aligned}$$and
$$\begin{aligned} {\left\| \frac{\partial F_2}{\partial x}\right\| \left\| \left( \frac{\partial F_1}{\partial x}\right) ^{-1}\right\| } \left\| \frac{\partial F_1}{\partial y}\right\| = O(A^\delta ) \left\| \left( \frac{\partial F_1}{\partial x}\right) ^{-1}\right\| \, O(A^{-1}) \end{aligned}$$
8.4 Geometric Interpretation
Condition \(a=\frac{\lambda }{A} > \frac{\exp \left( \frac{\pi }{K_\omega \, c_2}\right) -1}{\exp \left( \frac{\pi }{K_\omega \, c_2}\right) -c_2}\) provides enough expansion in the x-variable (angular coordinate) within the region \(R\subset {\text {Out}}(O_2)\). It means that there are at least two rectangles whose image under \(\mathcal {F}_{(A, \lambda )}\) overlaps with \(R\subset {\text {Out}}(O_2)\) at least twice, giving rise to a suspended horseshoe. Hyperbolicity is obtained by considering rectangles whose vertical boundaries do not have reversals of orientation.

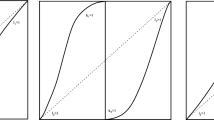
Image of \(\eta (W^u(O_2)\cap {\text {In}}(O_1))\) for different values of \(\frac{\lambda }{A}\) with \(K_\omega ^0\) fixed. Transition from an invariant and attracting curve (a) to a horseshoe (d) for a fixed \(K_\omega ^0>0\) and \(\lambda /A\) increasing. One observes the “breaking of the wave” which accompanies the break of the invariant circle \(\mathcal {C}\). In d, a neighborhood of \(y=0\) is folded and mapped into itself, leading to the formation of horseshoes—see Fig. 9
Remark 8.4
The dynamics of \(\Lambda \) is mainly governed by the geometric configuration of the global invariant manifold \(W^u(O_2)\).
9 Proof of Theorem E
In the bifurcation diagram \(\left( \frac{\lambda }{A}, K_\omega \right) \), we may draw two smooth curves in the first quadrant, the graphs of \(h_1\) and \(h_2\), such that:
-
(1)
\(h_1(K_\omega )=\frac{1}{\sqrt{1+K_\omega ^2}}\) and \(h_2(K_\omega )= \frac{\exp \left( \frac{6\pi }{K_\omega \, }\right) -1}{\exp \left( \frac{6\pi }{K_\omega \, }\right) -1/6}\);
-
(2)
the region below the graph of \(h_1\) corresponds to flows having an invariant and attracting torus with zero topological entropy (regular dynamics);
-
(3)
the region above the graph of \(h_2\) corresponds to vector fields whose flows exhibit chaos (chaotic dynamics).
For \(A, K_\omega >0\) fixed, as \(\lambda \) increases, one observes the “breaking of the wave” which accompanies the break of the invariant circle \(\mathcal {C}\). As suggested in Fig. 10, the attracting curve \(\mathcal {C}\) (whose existence is ensured by Theorem B) starts to disintegrate into a finite collection of periodic saddles and sinks, a phenomenon occurring within an Arnold tongue. Once the horseshoes develop, they persist.

In the Arnold tongue \(\mathcal {T}_k\), there are three lines corresponding to the emergence of a homoclinic tangency associated to a dissipative periodic point. Left: homoclinic tangency of third class which occurs along \(S^k\); right: homoclinic tangencies which occur along the lines \(\text {Hom}_1^k\), \(\text {Hom}_2^k\). Center: \(B_k^1\) and \(B_k^2\): saddle-node bifurcations; \(D^k\): period doubling bifurcation (torus-breakdown); \(M_k^1, M_k^2\): above these points, the maximal invariant set is not homeomorphic to a circle; \(Q_k\): saddle; \(P_k\): sink
In what follows, we describe generic mechanisms to break an attracting two-dimensional torus which involves the onset of homoclinic tangencies produced by the stable and unstable manifolds of a dissipative saddle.Footnote 4 These tangencies are the source of strange attractors. We address the reader to [1, 3, 4, 8] for more information on the subject. A comprehensive description of these phenomena has been given by Shilnikov et al. [48].
9.1 Dissecting an Arnold Tongue
For \(\varepsilon >0\) small, the choice of parameters in Sect. 2 (\(\varepsilon>A>\lambda \ge 0\)) lets us to build the bifurcation diagram of Fig. 11, in the domain
We suggest that the reader follows this subsection observing Fig. 11.
Within the region above, for each \(k\in {\mathbb {N}}\), we may define an Arnold tongue (or resonance wedge), denoted by \(\mathcal {T}_k\), adjoining the horizontal axis at a point \(A_k=(\exp (-2\pi k), \, 0).\) Parameters within this wedge correspond to Poincaré maps with at least a pair of fixed points; one of the fixed points is always of saddle-type (say \(Q_k\)); the other point is a sink (say \(P_k\)). We suppose just one pair of fixed points for the following analysis (as shown in Fig. 11).
The borders of the Arnold tongue \(\mathcal {T}_k\) are the bifurcation curves \(B_1^k\) and \(B_2^k\) on which the fixed points merge to a saddle-node. The curve \(B_2^k\) continue up to the line \(\lambda /A = 1\), while the curve \(B_1^k\) bends to the left staying below \(\lambda /A= 1\). Eventually these curves may touch the corresponding curves of other tongue, meaning that there are parameter values for which the periodic points of periods k and m coexist, \(m, k\in {\mathbb {N}}\).
The points \(M_1^k\) and \(M_2^k\) correspond to pre-wiggles: below these points, in \(B_1^k\) and \(B_2^k\), the limit set of \(W^u(Q_k)\) is the saddle-node itself and is homeomorphic to a circle. Above this point, the maximal invariant set is not homeomorphic to a circle. There is also a curve, say \(D^k\), above which the invariant torus (or the curve \(\mathcal {C}\)) no longer exists due to period doubling bifurcation process [7].
In the next subsection we will emphasise the role played by the lines \(\text {Hom}_1^k\), \(\text {Hom}_2^k\) and \(S^k\), also depicted in Fig. 11.
9.2 Strange Attractors
Continuing the process of dissecting an Arnold tongue, the authors of [1, 7] describe generic mechanisms by which the invariant and attracting torus is destroyed. Two of them are revived in the next result and involve homoclinic tangencies—routes [PA] and [PB] of [7].
Theorem 9.1
( [1, 7], adapted) For \(K_\omega ^0>0\) fixed, in the bifurcation diagram \(\left( -\ln A, \frac{\lambda }{A}\right) \), within \(\mathcal {T}_k\):
-
(1)
there are two curves \(\text {Hom}_1^k\) and \(\text {Hom}_2^k\) corresponding to a homoclinic tangency associated to a dissipative periodic point of the first return map \(\mathcal {F}_{(A, \lambda )}\).
-
(2)
there is one curve \(S^k\) corresponding to a homoclinic tangency (of third class) associated to a dissipative periodic point of the first return map \(\mathcal {F}_{(A, \lambda )}\).
Along the bifurcation curves \(\text {Hom}_1^k\) and \(\text {Hom}_2^k\), one observes a homoclinic contact of the components \(W^s(Q_k)\) and \(W^u(Q_k)\), where \(Q_k\) is a dissipative saddle, as illustrated in Fig. 11(right). The curves \(\text {Hom}_1^k\) and \(\text {Hom}_2^k\) divide the region above \(D^k\) into two regions with simple and complex dynamics. In the zone above the curves \(\text {Hom}_1^k\) and \(\text {Hom}_2^k\), there is a fixed point \(Q_k\) exhibiting a transverse homoclinic intersection, and thus the corresponding map \(\mathcal {F}_{(A, \lambda )}\) exhibits nontrivial hyperbolic chaotic sets. Other stable points of large period exist in the region above the curves \(\text {Hom}_1^k\) and \(\text {Hom}_2^k\) since the homoclinic tangencies arising in these lines are generic [19, 39]. The curve \(S^k\) corresponds to a homoclinic tangency of third class meaning that there are tangencies associated to the fixed points which have emerged from the period-doubling bifurcation at \(D^k\) (see the meaning of \(D^k\) in Sect. 9.1). Again, above these curves, in the parameter space \((-\ln A, \frac{\lambda }{A})\), there is a dense set of parameters for which the map \(\mathcal {F}_{(A, \lambda )}\) has infinitely many sinks. The next result will be used to finish the proof of Theorem E:
Theorem 9.2
[37] Let \((f_\mu )_\mu \) a one-parameter family of diffeomorphisms on a surface S and suppose that for \(f_{\mu _0}\) has a homoclinic tangency associated to a dissipative periodic point \(q\in S\). Then, under generic conditions, there is a positive Lebesgue measure set E of parameter values near \(\mu _0\) such that for all \(\mu \in E\), the diffeomorphism \(f_\mu \) exhibits a Hénon-like strange attractor near the orbit of tangency (with an ergodic SRB measure).
By Theorem 9.1, the existence of \(\text {Hom}_1^k\), \(\text {Hom}_2^k\) and \(S^k\) shows that there are curves in the space of parameters \(\left( A, \frac{\lambda }{A} \right) \) for which the corresponding first return map has a quadratic (generic) homoclinic tangency associated to a dissipative periodic point of the first return map \(\mathcal {F}_{(A, \lambda )}\). Using now Theorem 9.2, there exists a positive measure set \(\Delta \) of parameter values, so that for every \(a\in \Delta \), \(\mathcal {F}_{(A, \lambda )}\) admits a strange attractor of Hénon-type with an ergodic SRB measure. This completes the proof of Theorem E.
Remark 9.3
In this type of result, the number of connected components with which the strange attractors intersect the section \({\text {Out}}(O_2)\) is not specified nor is the size of their basins of attraction.
Remark 9.4
In (P4) we have asked for the existence of two 1D-connections. Nevertheless the statements of Theorems B, D and E still hold if (P4) is replaced by:
-
(P4a) There is one trajectory contained in \(W^u(O_1)\cap W^s(O_2)\),
provided the map \(\Psi _{2\rightarrow 1}^{(A, \lambda )}\) sends the line \(W^u_{\text {loc}}(O_2)\, \cap \, {\text {Out}}(O_2)\) into the connected component of \({\text {In}}(O_1)\backslash W^s_{\text {loc}}(O_1)\) where solutions follow the 1D-connection. This remark will be important in Sect. 10.
10 An Application: Hopf-Zero Singularity Unfolds Strange Attractors
In this section, we prove the existence of strange attractors in particular analytic unfoldings of a Hopf-zero singularity. In order to improve the readability of the paper, we recall to the reader the most important steps about unfoldings of a Hopf-zero singularity.
From now on, we consider Hopf-Zero singularities, that is, three-dimensional vector fields \(f^*\) in \({\mathbb {R}}^3\) such that:
-
\(O\equiv (0,0,0)\) is an equilibrium of \(f^\star \);
-
the spectrum of \(df^*(0, 0, 0)\) is \(\{\pm i\omega , \, 0\}\), with \(\omega >0\).
Without loss of generality, we can assume that:
Observe that the lowest codimension singularities in \({\mathbb {R}}^3\) with a three-dimensional center manifold are the ones whose linear part is linearly conjugated to (10.1).
10.1 The Normal Form
The normal form of a degenerate jet with linear part given by \( \left[ {\begin{array}{ccc} 0&{} \omega &{} 0 \\ -\omega &{} 0 &{} 0 \\ 0&{}0&{}0 \\ \end{array} } \right] \left[ {\begin{array}{c} x \\ y \\ z \\ \end{array} } \right] \) may be written in cylindrical coordinates \((r, \theta , z)\) by:
where \(\omega >0\) and \(a_1, a_2, a_3, b_1, b_2, b_3, b_4 \in {\mathbb {R}}\backslash \{0\}\). Normal form can be chosen in such a way that, up to arbitrarily high \(k\in {\mathbb {N}}\), the truncation of order k contains no \(\theta \)-dependent terms [25]. Ultimately, one has to restore the tail which, generically, contains no \(\theta \)-dependent terms.Footnote 5 Truncating (10.2) at order 2 and removing the angular coordinate \(\theta \), we obtain:

Setting \( r^{new} = -\sqrt{|b_1 b_2|}\, r\), \(z^{new}=-b_2 z,\) and dropping the superscripts “new”, we get the differential equation:
where \( a=-a_1/b_2 \) and \( b=\pm 1.\) The phase diagram of (10.4) for \(a>0\) and \(b=-1\) is shown in Fig. 12a.
Takens [49] proved that there are six topological types for the normal form (10.4), but from now on, we are only interested in the one characterized by the conditions \(b=-1\) and \(a>0\) (Type I of [11]; Case III of [25]). The line defined by \(r=0\) (z-axis) is flow-invariant. According to [25], any generic unfolding of (10.4), truncated at second order, may be written as:
whose flow satisfy the following properties (for \(\mu _2\ge 0\) and \({\mu _2}>\frac{\mu _1^2}{a^2}\)):
-
there are two equilibria of saddle-type, say \(p_1=(0, \sqrt{\mu _2})\), \(p_2=(0, -\sqrt{\mu _2})\), whose eigenvalues of \(df^\star \) at the equilibria are \(\mu _1 \pm a\sqrt{\mu _2}\) and \({\mp } 2\sqrt{\mu _2}\);
-
there is another equilibrium given by \(\left( \sqrt{\mu _2-\frac{\mu _1^2}{a^2}}, -\frac{\mu _1}{a}\right) \) which is a center;
-
for \(\mu _1=0\), there is a heteroclinic cycle associated to \(p_1\) and \(p_2\);
-
for \(\mu _1=0\), if \(G(r,z)= \frac{a}{2} r^\frac{2}{a} \left( \mu _2 -\frac{r^2}{1+a}-z^2\right) \) then the Lie derivative of G with respect to the vector field associated to (10.5) satisfies the equality:
$$\begin{aligned} \mathcal {L}_v \, G \equiv 0, \end{aligned}$$meaning that there is a family of non-trivial periodic solutions limiting the inner part of the planar heteroclinic cycle associated to \(p_1\) and \(p_2\). This cycle is Lyapunov stable—see Fig. 12b.
The truncated normal form of order 2 is not enough to our purposes because the heteroclinic cycle is not asymptotically stable.
10.2 Truncating at Order 3
Truncating at third order any generic unfolding of (10.4) with \(a>0\) and \(b=-1\), we obtain:
Assuming that the new parameters \(c,d,e,f\in {\mathbb {R}}\) satisfy the open conditions:
the flow of (10.6) exhibits a heteroclinic cycle associated to
at all points \((\mu _1, \mu _2)\) lying at the line AHC defined by
This cycle has a non-empty basin of attraction [25, 31]. Line AHC is depicted in Fig. 13.

10.3 General Perturbations
Adding the angular coordinate \(\theta \) to Eq. (10.6), we define a \(\mathbb {SO}(2)\)-equivariant vector field, say \( f_{(\mu _1, \mu _2)}.\) Its flow has cycle associated to the lift of \(\tilde{p}_1\) and \(\tilde{p}_2\), say \(O_1\) and \(O_2\) with non-empty basin of attraction. This cycle is made by one 1D and one 2D heteroclinic connections associated to two hyperbolic saddles-foci with different Morse indices. The coincidence of the invariant manifolds of the hyperbolic saddle-foci is exceptional and they are expected to split.
Generic analytic unfoldings of the Hopf-zero singularities were considered in [21]; the authors introduced an extra parameter \(\varepsilon = \sqrt{\mu _2}\) and obtained a singular perturbation problem with a pure rotation when \(\varepsilon =0\) or a family with rotation speed tending to \(+\infty \) as \(\varepsilon \rightarrow 0\). Since the imaginary part of the eigenvalues of the vector field at the equilibria has the form \(O(1/\varepsilon )\), this means that \(K_\omega \rightarrow 0\); details in Section 3 of [21]. In the present work, we are interested in particular unfoldings of a Hopf-zero singularity.
Definition 3
A Gaspard-type unfolding of a Hopf-zero singularity \(f^\star \) (with \(a>0\) and \(b=-1\) in (10.4)) has the form:
where \(\mathcal {H}_1, \mathcal {H}_2, \mathcal {H}_3 \) are arbitrary smooth functions of degree greater than three in the variables r and z (i.e. they have the form of equations (2.15) and (2.16) of Gaspard [22]).
Proposition 10.1
Let \(f^\star \) be a Hopf-zero singularity (with \(a>0\) and \(b=-1\) in (10.4)). Then there exists an analytic curve \(\mathcal {S}\) in the parameter space \((\mu _1, \mu _2)\) and a domain \(\mathcal {W}\) contained in a wedge shaped neighborhood of \(\mathcal {S}\) such that: if \((\mu _1, \mu _2)\in \mathcal {W}\) then any Gaspard-type unfolding of \(f^\star \) contains strange attractors (of Hénon-type) with an ergodic SRB measure.
In the following proof, Hypothesis (P8) is implicit; it corresponds to the expected unfolding from the coincidence of the two-dimensional invariant manifolds of the equilibria; see Remark 5.1.
Proof
We apply Theorem E to prove Proposition 10.1. Indeed, if \((\mu _1, \mu _2)\in AHC=:\mathcal {S}\), then the flow of \( f_{(\mu _1, \mu _2)}\) satisfies:
-
there are two hyperbolic saddle-foci \(O_1\) and \(O_2\) satisfying (P1)–(P2);
-
the manifolds \(W^u(O_2)\) and \(W^s(O_1)\) coincide and one branch of \(W^u(O_1)\) coincide with \(W^s(O_2)\)—see Remark 9.4. In particular, there is a heteroclinic cycle associated to \(O_1\) and \(O_2\) with non-empty basin of attraction, meaning that (P3)–(P4a) are satisfied;
-
by construction on the way the angular coordinate is acting on (10.6), the saddle-foci have the same chirality—(P5) is valid;
-
by hypothesis, we perturb \(f_{(\mu _1, \mu _2)}\) in such a way that the manifolds \(W^u(O_2)\) and \(W^s(O_1)\) do not intersect and the one-dimensional manifolds are preserved, emerging an attracting 2-torus. The dynamics on it exhibits intervals of frequency locking and irrational flow as the rotation number varies. This perturbation correspond to (P6)–(P7).
Adding the \( O(\varepsilon )\)-terms will correspond to generic perturbations (without symmetry) that break the attracting two-dimensional torus [25]. Observe that \(\lim _{\varepsilon \rightarrow 0} K_\omega =+\infty \) since the imaginary part of the eigenvalues of the vector field at the equilibria has the form \(O(1/\varepsilon )\) (cf. pp. 4444 of [21]). By Theorem E, the result follows, where the parameter \(\varepsilon \) plays the role of \(\lambda \). \(\square \)
Remark 10.2
Besides the break of the two-dimensional attracting torus, adding generic \( O(\varepsilon )\)-terms to \( f_{(\mu _1, \mu _2)}\) may imply that the 1D-connection is also broken. This does not affect the proof of Proposition 10.1 since the existence of strange attractors has been obtained via Torus-breakdown phenomena, which occur even when the 1D-connection is broken.
Theorem E cannot be applied directly for generic unfoldings of the Hopf-zero singularity because there is no chance to express a generic Hopf-zero singularities as perturbations of a vector field whose flow has an attracting heteroclinic cycle.
10.4 Discussion and Conjecture
Following Bonckaert and Fontich [14], when the scaling parameters defined in [21] tend to 0, the invariant manifolds have a limit position given by the invariant manifolds of the equilibria at the 2-jet of the singularity when \(z>0\). Therefore, for any generic unfolding of the Hopf-zero singularity (Type I of [11]), the splitting distance is well defined for the 1D and 2D-connections. The first case was obtained in [9]—the distance \(\mathcal {S}^1\) between the 1D invariant manifolds is exponentially small with respect to \(\varepsilon >0\) and the coefficient in front of the dominant term depends on the full jet of the singularity. The splitting function for the 2D invariant manifolds, say \(\mathcal {S}^2\), has been obtained in [10].
When the manifolds \(W^u(O_2)\) and \(W^s(O_1)\) intersect transversely, conclusive results are given in [11]: any generic analytic unfolding of a Hopf-zero singularity exhibits Shilnikov bifurcations and strange attractors [16, 28].
When the two-dimensional manifolds of the saddle-foci do not intersect (see [10] and case \(\sigma \gg O(\varepsilon )\) of [11]Footnote 6), there exist trapping regions which prevent the existence of Shilnikov homoclinic cycles. In particular, the route Shilnikov bifurcations \(\Rightarrow \) Strange attractors is not possible. With that configuration (the invariant manifolds of the saddle-foci do not intersect), the existence of suspended horseshoes may be ensured by our Theorem D provided its hypotheses are satisfied—see Remark 9.4. Distances \(\mathcal {S}^1\) ( [9]) and \(\mathcal {S}^2\) ( [10]) have to be introduced in the definition of the transition maps. We conjecture that generic analytic unfoldings of a Hopf-zero singularity also include strange attractors created by the Torus-breakdown mechanism. We defer this task for a future work.
Notes
Since \({\mathbb {S}}^3\) is a compact set without boundary, the local solutions of (2.1) could be extended to \({\mathbb {R}}\).
The terminology Bykov is a tribute to V. Bykov who has dedicated his latest research activity to heteroclinic cycles with similar properties to those of \(\Gamma \).
Care is needed to compare both works because the constants choice and signs are different.
Note that, for small \(A, \lambda >0\), the first return map \(\mathcal {F}_{(A, \lambda )}\) is still contracting.
The author is grateful to one of the reviewers for pointing out this remark.
The condition \( \sigma \gg O(\varepsilon )\) does not refer to a class of unfoldings, but to a region in the parameter space associated to the unfolding.
References
Afraimovich, V.S., Shilnikov, L.P.: On invariant two-dimensional tori, their breakdown and stochasticity. In: Methods of the Qualitative Theory of Differential Equations, Gor’kov. Gos. University, pp. 3–26 (1983). Translated in: Amer. Math. Soc. Transl., (2), vol. 149 (1991) 201–212
Afraimovich, V.S., Bykov, V.V., Shilnikov, L.P.: On the structurally unstable attracting limit sets of Lorenz attractor type. Tran. Moscow Math. Soc. 2, 153–215 (1982)
Afraimovich, V.S., Hsu, S.-B., Lin, H.E.: Chaotic behavior of three competing species of May–Leonard model under small periodic perturbations. Int. J. Bifurc. Chaos 11(2), 435–447 (2001)
Afraimovich, V.S., Hsu, S.B.: Lectures on Chaotic Dynamical Systems. American Mathematical Society and International Press, Boston (2002)
Aguiar, M.: Vector Fields with Heteroclinic Networks. Ph.D. thesis, Departamento de Matemática Aplicada, Faculdade de Ciências da Universidade do Porto (2003)
Aguiar, M.A.D., Castro, S.B.S.D., Labouriau, I.S.: Dynamics near a heteroclinic network. Nonlinearity 18, 391–414 (2005)
Anishchenko, V., Safonova, M., Chua, L.: Confirmation of the Afraimovich–Shilnikov torus-breakdown theorem via a torus circuit. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 40(11), 792–800 (1993)
Aronson, D., Chory, M., Hall, G., McGehee, R.: Bifurcations from an invariant circle for two-parameter families of maps of the plane: a computer-assisted study. Commun. Math. Phys. 83(3), 303–354 (1982)
Baldomá, I., Castejón, O., Seara, T.M.: Exponentially small heteroclinic breakdown in the generic Hopf-Zero singularity. J. Dyn. Differ. Equ. 25(2), 335–392 (2013)
Baldomá, I., Castejón, O., Seara, T.M.: Breakdown of a 2D heteroclinic connection in the Hopf-zero singularity (II). The generic case. J. Nonlinear Sci. 28(4), 1489–1549 (2018)
Baldomá, I., Ibáñez, S., Seara, T.: Hopf-Zero singularities truly unfold chaos. Commun. Nonlinear Sci. Numer. Simul. 84, 105162 (2020)
Benedicks, M., Carleson, L.: The dynamics of the Hénon map. Ann. Math. 133(1), 73–169 (1991)
Bessa, M., Rodrigues, A.A.P.: Dynamics of conservative Bykov cycles: tangencies, generalized Cocoon bifurcations and elliptic solutions. J. Differ. Equ. 261(2), 1176–1202 (2016)
Bonckaert, P., Fontich, E.: Invariant manifolds of dynamical systems close to a rotation: transverse to the rotation axis. J. Differ. Equ. 214(1), 128–155 (2005)
Boyland, P.L.: Bifurcations of circle maps: Arnold tongues, bistability and rotation intervals. Commun. Math. Phys. 106, 353–381 (1986)
Broer, H., Vegter, G.: Subordinate Shilnikov bifurcations near some singularities of vector fields having low codimension. Ergodic Theory Dyn. Syst. 4, 509–525 (1984)
Bykov, V.V.: Orbit structure in a neighborhood of a separatrix cycle containing two saddle-foci. Am. Math. Soc. Transl. 200, 87–97 (2000)
Carvalho, M., Rodrigues, A.A.P.: Complete set of invariants for a Bykov attractor. Regul. Chaotic Dyn. 23, 227–247 (2018)
Colli, E.: Infinitely many coexisting strange attractors. Ann. Inst. H. Poincaré 15, 539–579 (1998)
Deng, B.: The Shilnikov problem, exponential expansion, strong \(\lambda \)-Lemma, \(C^1\) linearisation and homoclinic bifurcation. J. Differ. Equ. 79, 189–231 (1989)
Dumortier, F., Ibáñez, S., Kokubu, H., Simó, C.: About the unfolding of a Hopf-zero singularity. Discrete Contin. Dyn. Syst. 33(10), 4435–4471 (2013)
Gaspard, P.: Local birth of homoclinic chaos. Physica D 62(1–4), 94–122 (1993)
Gavrilov, N.K., Shilnikov, L.P.: On three-dimensional dynamical systems close to systems with a structurally unstable homoclinic curve. Part I: Math. USSR Sbornik 17, 467–485 (1972). Part II: ibid 19, 139–156 (1973)
Gonchenko, S.V., Shilnikov, L.P., Turaev, D.V.: Quasiattractors and homoclinic tangencies. Comput. Math. Appl. 34(2–4), 195–227 (1997)
Guckenheimer, J., Holmes, P.: Nonlinear Oscillations, Dynamical Systems, and Bifurcations of Vector Fields. Applied Mathematical Sciences, vol. 42. Springer, Berlin (1983)
Herman, M.: Mesure de Lebesgue et Nombre de Rotation. Lecture Notes in Mathematics, vol. 597, pp. 271–293. Springer, Berlin (1977)
Hirsch, M.W., Pugh, C., Shub, M.: Invariant manifolds. Bull. Am. Math. Soc. 76(5), 1015–1019 (1970)
Homburg, A.J.: Periodic attractors, strange attractors and hyperbolic dynamics near homoclinic orbits to saddle-focus equilibria. Nonlinearity 15, 1029–1050 (2002)
Homburg, A.J., Sandstede, B.: Homoclinic and Heteroclinic Bifurcations in Vector Fields. Handbook of Dynamical Systems, vol. 3, pp. 379–524. North Holland, Amsterdam (2010)
Knobloch, J., Lamb, J.S.W., Webster, K.N.: Using Lin’s method to solve Bykov’s problems. J. Differ. Equ. 257(8), 2984–3047 (2014)
Kuznetsov, Y.A.: Elements of Applied Bifurcation Theory. Applied Mathematical Sciences, vol. 112, 3rd edn. Springer, New York (2004)
Koon, W.S., Lo, M., Marsden, J., Ross, S.: Heteroclinic Connections Between Periodic Orbits and Resonance Transition in Celestial Mechanics. Control and Dynamical Systems Seminar, California Institute of Technology, Pasadena, California (1999)
Labouriau, I.S., Rodrigues, A.A.P.: Global generic dynamics close to symmetry. J. Differ. Equ. 253(8), 2527–2557 (2012)
Labouriau, I.S., Rodrigues, A.A.P.: Dense heteroclinic tangencies near a Bykov cycle. J. Differ. Equ. 259(12), 5875–5902 (2015)
Labouriau, I.S., Rodrigues, A.A.P.: Global bifurcations close to symmetry. J. Math. Anal. Appl. 444(1), 648–671 (2016)
Lamb, J.S.W., Teixeira, M.A., Webster, K.N.: Heteroclinic bifurcations near Hopf-zero bifurcation in reversible vector fields in \(\mathbb{R}^3\). J. Differ. Equ. 219, 78–115 (2005)
Mora, L., Viana, M.: Abundance of strange attractors. Acta Math. 171(1), 1–71 (1993)
Newhouse, S.E.: Diffeomorphisms with infinitely many sinks. Topology 13, 9–18 (1974)
Newhouse, S.E.: The abundance of wild hyperbolic sets and non-smooth stable sets for diffeomorphisms. Publ. Math. Inst. Hautes Études Sci. 50, 101–151 (1979)
Ovsyannikov, I.M., Shilnikov, L.P.: On systems with a saddle-focus homoclinic curve. Math. USSR Sb. 58, 557–574 (1987)
Palis, J., Takens, F.: Hyperbolicity and Sensitive Chaotic Dynamics at Homoclinic Bifurcations: Fractal Dimensions and Infinitely Many Attractors in Dynamics. Cambridge University Press, Cambridge (1995)
Passeggi, A., Potrie, R., Sambarino, M.: Rotation intervals and entropy on attracting annular continua. Geom. Topol. 22(4), 2145–2186 (2018)
Rodrigues, A.A.P.: Persistent switching near a heteroclinic model for the geodynamo problem. Chaos Solitons Fractals 47, 73–86 (2013)
Rodrigues, A.A.P.: Repelling dynamics near a Bykov cycle. J. Dyn. Differ. Equ. 25(3), 605–625 (2013)
Rodrigues, A.A.P., Labouriau, I.S.: Spiralling dynamics near heteroclinic networks. Physica D 268, 34–49 (2014)
Rodrigues, A.A.P., Labouriau, I.S., Aguiar, M.A.D.: Chaotic double cycling. Dyn. Sys. Int. J. 26(2), 199–233 (2011)
Shilnikov, L.P.: A contribution to the problem of the structure of an extended neighborhood of a rough equilibrium state of saddle-focus type. Math. USSR Sb. 10, 91–102 (1970)
Shilnikov, A., Shilnikov, L.P., Turaev, D.: On some mathematical topics in classical synchronization. A tutorial. Int. J. Bifurc. Chaos. Appl. Sci. Eng. 14, 2143–2160 (2004)
Takens, F.: Singularities of vector fields. Publ. Math. l’IHES 43(1), 47–100 (1974)
Wang, Q., Oksasoglu, A.: Dynamics of homoclinic tangles in periodically perturbed second-order equations. J. Differ. Equ. 250(2), 710–751 (2011)
Wang, Q., Young, L.S.: From invariant curves to strange attractors. Commun. Math. Phys. 225, 275 (2002)
Wiggins, S.: Global Bifurcations and Chaos. Analytical Methods. Applied Mathematical Sciences, vol. 73. Springer, New York (1988)
Yorke, J.A., Alligood, K.T.: Cascades of period-doubling bifurcations: a prerequisite for horseshoes. Bull. Am. Math. Soc. (N.S.) 9(3), 319–322 (1983)
Acknowledgements
Special thanks to Santiago Ibáñez (Univ. Oviedo) and Isabel Labouriau (Univ. Porto) for fruitful discussions. The author is also grateful to the three referees for the constructive comments, corrections and suggestions which helped to improve the readability of this manuscript.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Alexandre A. P. Rodrigues was partially supported by CMUP, which is financed by national funds through FCT—Fundação para a Ciência e Tecnologia, I.P., under the project with Reference UIDB/00144/2020. The author also acknowledges financial support from Program INVESTIGADOR FCT (IF/00107/2015).
Glossary
Glossary
For \(\varepsilon >0\) small, consider the two-parameter family of \(C^3\)-smooth autonomous differential equations
Denote by \(\varphi _{(A, \lambda )}(t,x)\), \(t \in {\mathbb {R}}\), the associated flow.
1.1 Symmetry
Given a group \(\mathcal {G}\) of endomorphisms of \({\mathbb {S}}^3\), we will consider two-parameter families of vector fields \((f_{(A, \lambda )})\) under the equivariance assumption \(f_{(A, \lambda )}(\gamma x)=\gamma f_{(A, \lambda )}(x)\) for all \(x \in {\mathbb {S}}^3\), \(\gamma \in \mathcal {G}\) and \((A, \lambda )\in [0, \varepsilon ]^2.\) For an isotropy subgroup \(\widetilde{\mathcal {G}}< \mathcal {G}\), we will write \({\text {Fix}}(\widetilde{\mathcal {G}})\) for the vector subspace of points that are fixed by the elements of \(\widetilde{\mathcal {G}}\). Observe that, for \(\mathcal {G}-\)equivariant differential equations, the subspace \({\text {Fix}}(\widetilde{\mathcal {G}})\) is flow-invariant.
1.2 Attracting Set
A subset \(\Omega \) of a topological space \(\mathcal {M}\) for which there exists a neighborhood \(U \subset \mathcal {M}\) satisfying \(\varphi (t,U)\subset U\) for all \(t\ge 0\) and \(\bigcap _{t\,\in \,{\mathbb {R}}^+}\,\varphi (t,U)=\Omega \) is called an attracting set by the flow \(\varphi \), not necessarily connected. Its basin of attraction, denoted by \(\mathbf{B} (\Omega )\) is the set of points in \(\mathcal {M}\) whose orbits have \(\omega -\)limit in \(\Omega \). We say that \(\Omega \) is asymptotically stable (or that \(\Omega \) is a global attractor) if \(\mathbf{B} (\Omega )=\mathcal {M}\). An attracting set is said to be quasi-stochastic if it encloses periodic solutions with different Morse indices, structurally unstable cycles, sinks and saddle-type invariant sets.
1.3 Heteroclinic Structures
Suppose that \(O_1\) and \(O_2\) are two hyperbolic saddle-foci of \(f_{(A, \lambda )}\) with different Morse indices (dimension of the unstable manifold). There is a heteroclinic cycle associated to \(O_1\) and \(O_2\) if \(W^{u}(O_1)\cap W^{s}(O_2)\ne \emptyset \) and \(W^{u}(O_2)\cap W^{s}(O_1)\ne \emptyset .\) For \(i, j \in \{1,2\}\), the non-empty intersection of \(W^{u}(O_i)\) with \(W^{s}(O_j)\) is called a heteroclinic connection between \(O_i\) and \(O_j\), and will be denoted by \([O_i \rightarrow O_j]\). Although heteroclinic cycles involving equilibria are not a generic feature within differential equations, they may be structurally stable within families of systems which are equivariant under the action of a compact Lie group \(\mathcal {G}\subset \mathbb {O}(n)\), due to the existence of flow-invariant subspaces [25].
1.4 Bykov Cycle
A heteroclinic cycle between two hyperbolic saddle-foci of different Morse indices, where one of the connections is transverse (and so stable under small perturbations) while the other is structurally unstable, is called a Bykov cycle. A Bykov network is a connected union of heteroclinic cycles, not necessarily in finite number. We refer to [29] for an overview of heteroclinic bifurcations and substantial information on the dynamics near different kinds of heteroclinic cycles and networks.
1.5 Suspended Horseshoe
Given \((A, \lambda ) \in [0, \varepsilon ]^2\), suppose that there is a cross-section \(\mathcal {S}_\lambda \) to the flow \(\varphi _{(A, \lambda )}\) such that \(\mathcal {S}_{(A, \lambda )}\) contains a compact set \(\mathcal {K}_{(A, \lambda )}\) invariant by the first return map \(\mathcal {F}_{(A, \lambda )}\) to \(\mathcal {S}_{(A, \lambda )}\). Assume also that \(\mathcal {F}_{(A, \lambda )}\) restricted to \(\mathcal {K}_{(A, \lambda )}\) is conjugate to a full shift on a finite alphabet. Then the suspended horseshoe associated to \(\mathcal {K}_{(A, \lambda )}\) is the flow-invariant set \(\widetilde{\mathcal {K}_{(A, \lambda )}}=\{\varphi _\lambda (t,x)\,:\,t\in {\mathbb {R}},\,x\in \mathcal {K}_{(A, \lambda )}\}.\)
1.6 SRB Measure
Given an attracting set \({\Omega }\) for a continuous map \(R: \mathcal {M} \rightarrow \mathcal {M}\) of a compact manifold \( \mathcal {M}\), consider the Birkhoff average with respect to the continuous function \(T: \mathcal {M} \rightarrow {\mathbb {R}}\) on the R-orbit starting at \(x\in \mathcal {M}\):
Suppose that, for Lebesgue almost all points \(x\in \mathbf{B} ({\Omega })\), the limit (A.2) exists and is independent on x. Then L is a continuous linear functional in the set of continuous maps from \(\mathcal {M}\) to \({\mathbb {R}}\) (denoted by \(C(\mathcal {M}, {\mathbb {R}})\)). By the Riesz Representation Theorem, it defines a unique probability measure \(\mu \) such that:
for all \(T\in C(\mathcal {M}, {\mathbb {R}})\) and for Lebesgue almost all points \(x\in \mathbf{B} ({\Omega })\). If there exists an ergodic measure \(\mu \) supported in \({\Omega }\) such that (A.3) is satisfied for all continuous maps \(T\in C(\mathcal {M}, {\mathbb {R}})\) for Lebesgue almost all points \(x\in \mathbf{B} ({\Omega })\), where \(\mathbf{B} ({\Omega })\) has positive Lebesgue measure, then \(\mu \) is called a SRB measure and \({\Omega }\) is a SRB attractor.
Rights and permissions
About this article

Cite this article
Rodrigues, A.A.P. Unfolding a Bykov Attractor: From an Attracting Torus to Strange Attractors. J Dyn Diff Equat 34, 1643–1677 (2022). https://doi.org/10.1007/s10884-020-09858-z
Received:
Revised:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10884-020-09858-z