Incremental Conductance Based Particle Swarm Optimization Algorithm for Global Maximum Power Tracking of Solar-PV under Nonuniform Operating Conditions

 ,
,  ,
,  ,
,  and
and 
Abstract
:1. Introduction
- Design and application of ICPSO algorithm for extraction of efficient tracking the global maximum power point under NUOC.
- Proposed algorithm is effective to reduce the steady-state oscillations by continuous tracking of weight component.
- Proposed algorithm updates velocity and position of particles using the concept of I&C MPPT algorithm.
- Proposed ICPSO is useful for fast-tracking of the speed with negligible oscillations at the global maximum point compared to other conventional and hybrid MPP algorithms.
- Easy calculation for accurate tracking of global maximum during sudden fluctuations in temperature and irradiance level.
- MATLAB code has been successfully executed for various temperatures and Irradiation condition of Solar-PV array in a practical scenario.
2. Concept Behind the Proposed ICPSO Algorithm
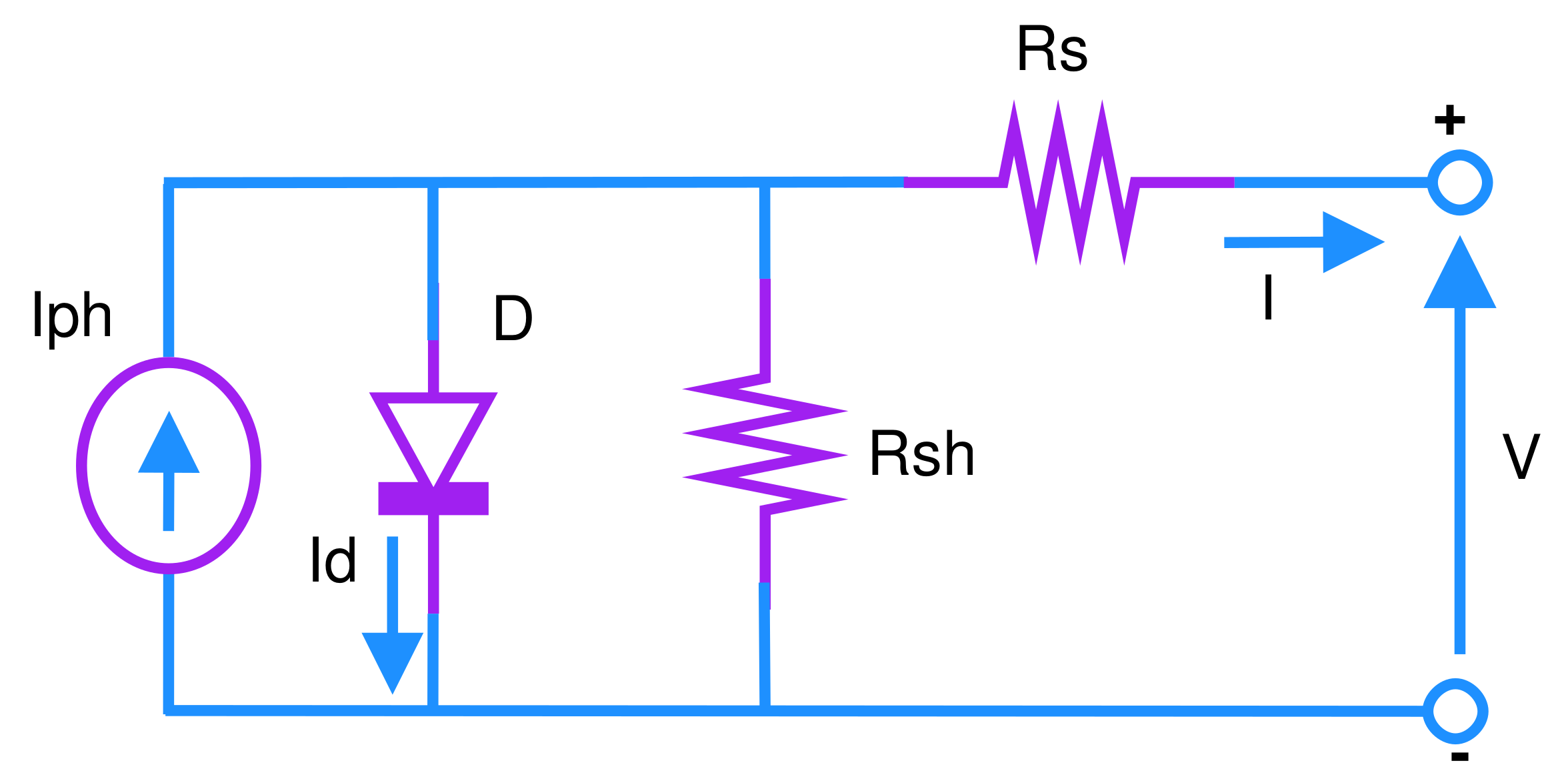
3. System under Consideration
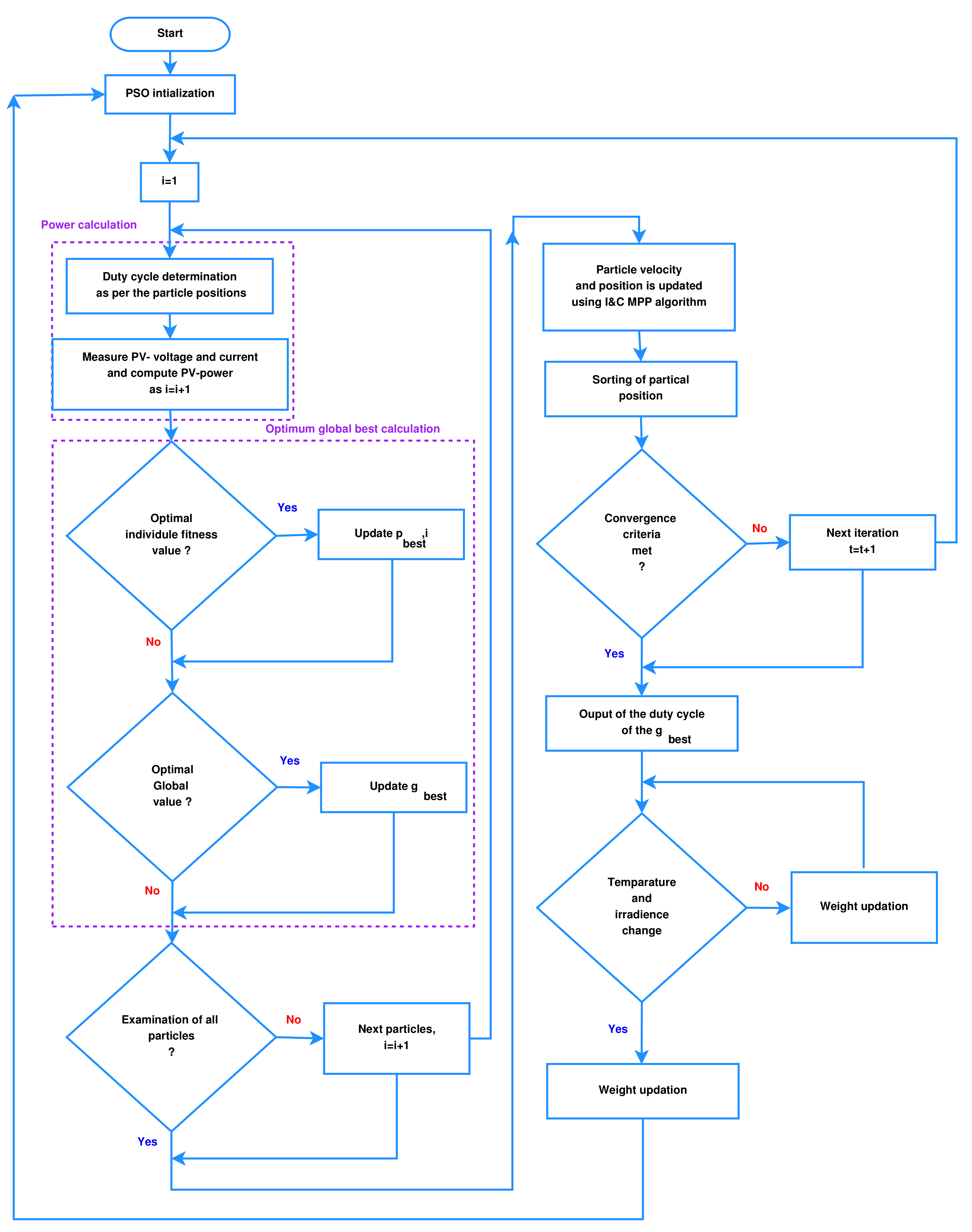
4. Design and Implementation of Proposed MPPT Algorithm
4.1. Concept of Incremental Conductance (I & C)
- →
- Operation point is at maximum power point (MPP)
- →
- Operation point is at left side of MPP
- →
- Operation point is at right side of MPP
4.2. Incremental Conductance Based Particle Swarm Optimization (ICPSO)
5. Concept Validation
5.1. Scenario-1→Irradiance 1000 W/m, Temperature 25 C
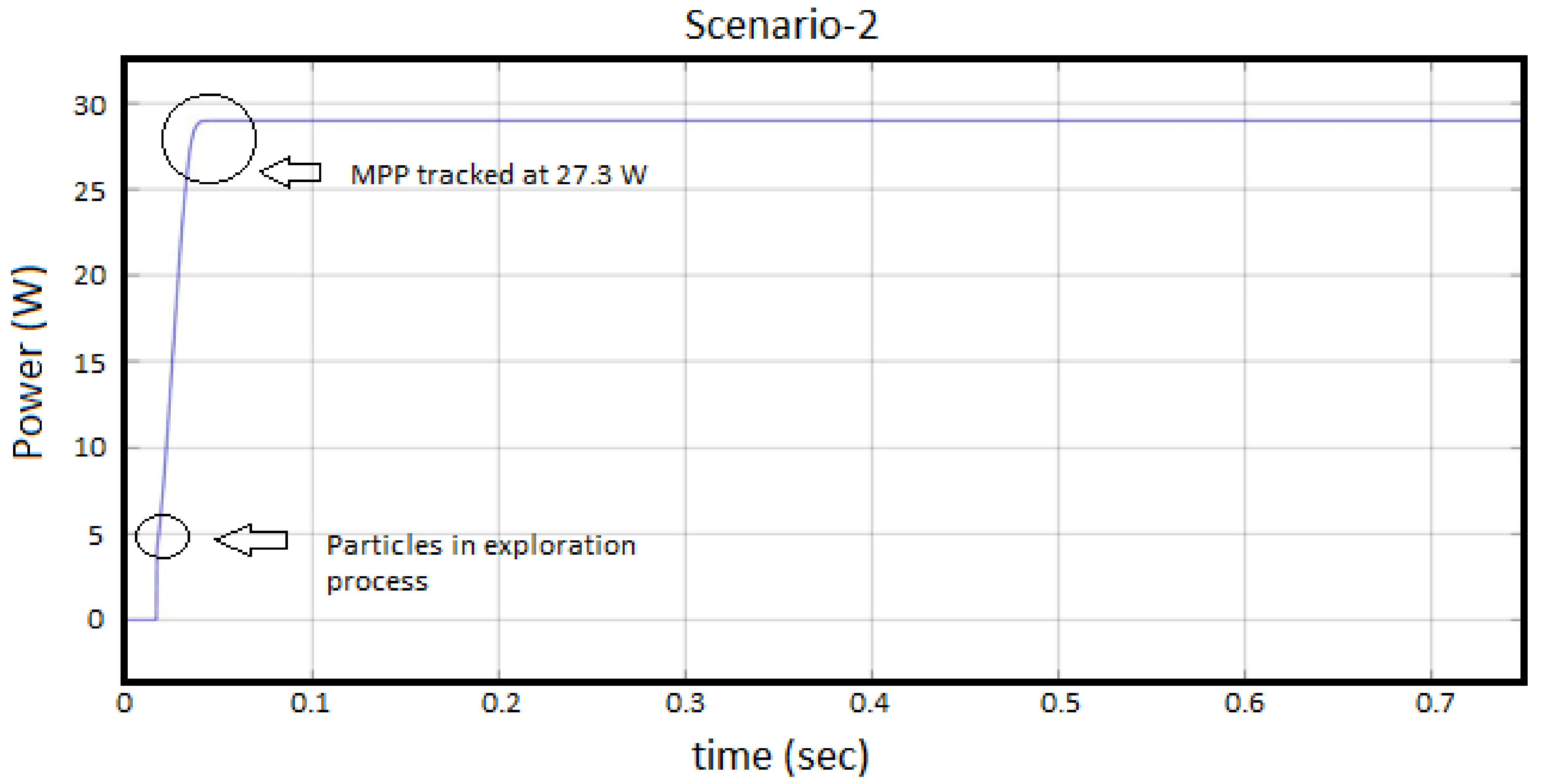
5.2. Scenario-2→Irradiance 300 W/m, Temperature 25 C
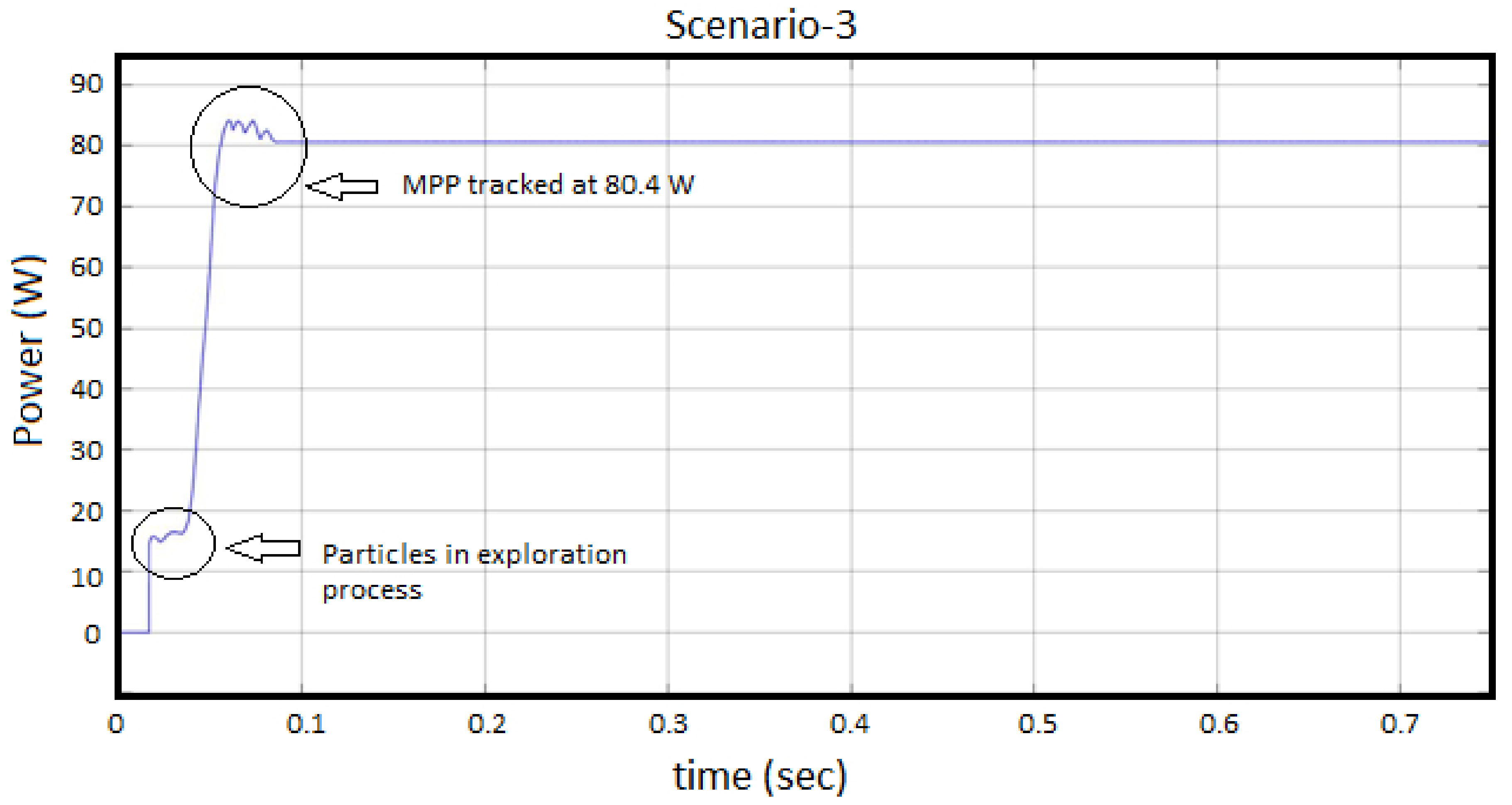
5.3. Scenario-3→Irradiance 1000 W/m, Temperature 30 C
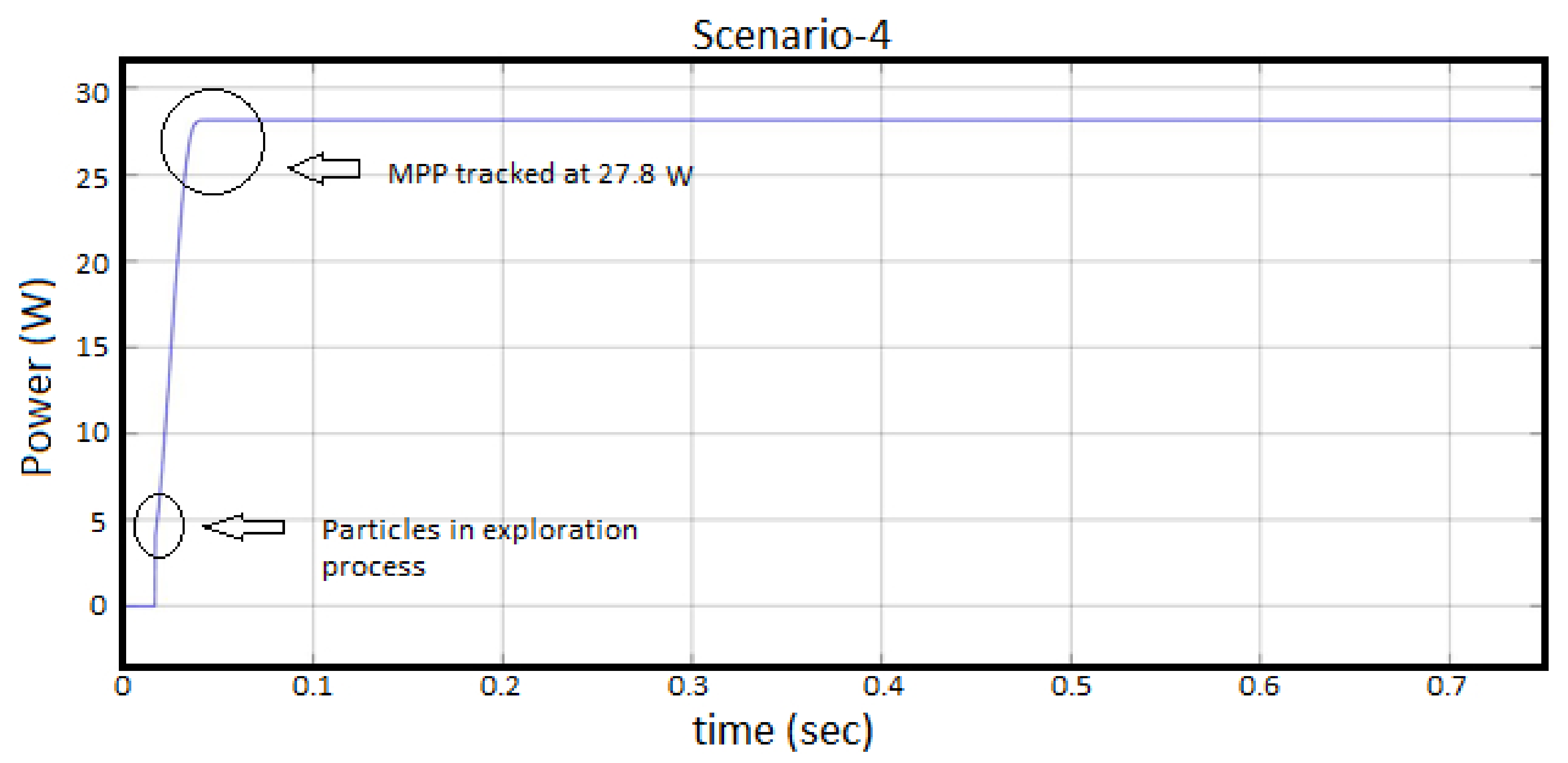
5.4. Scenario-4→Irradiance 300 W/m, Temperature 30 C
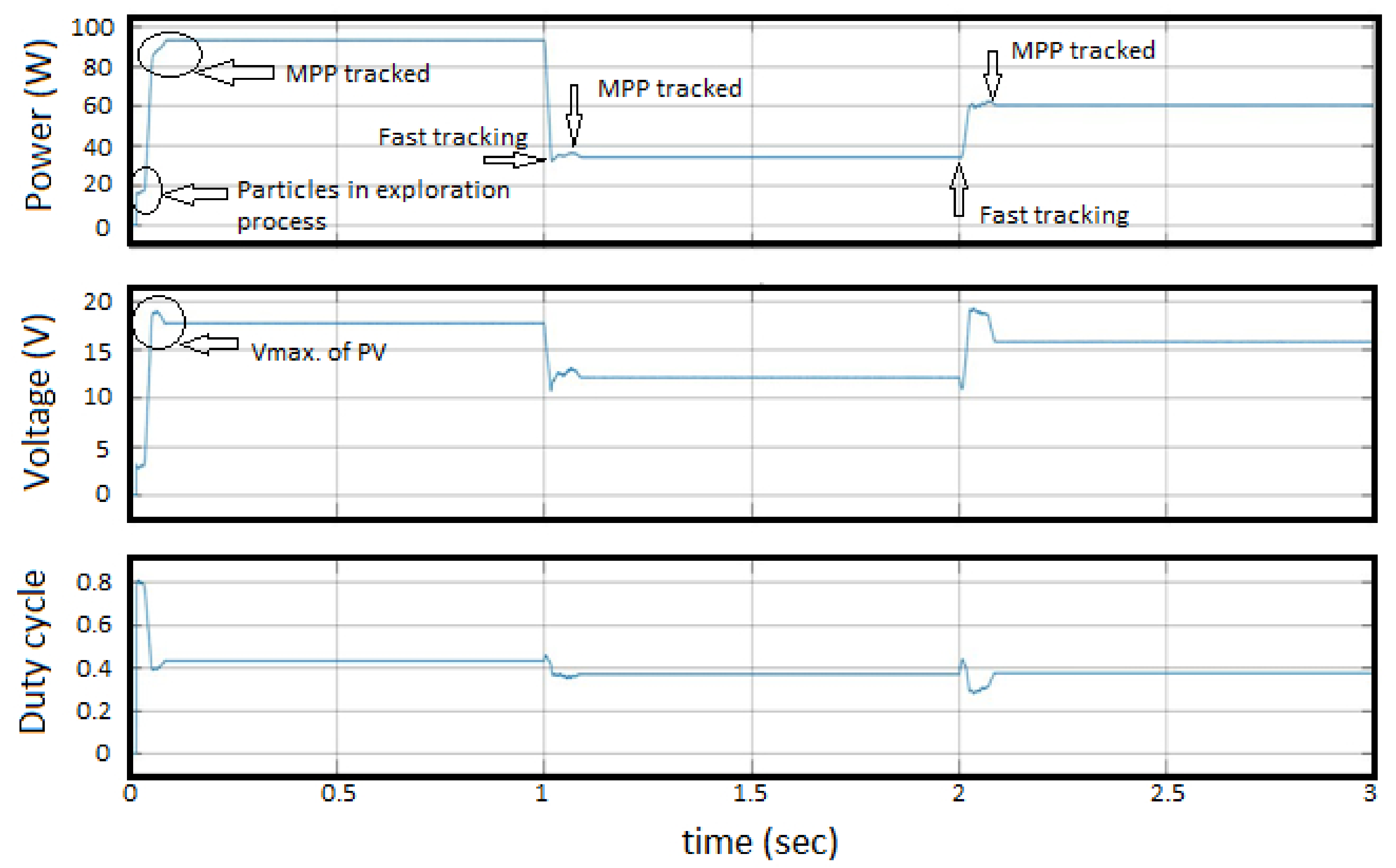
5.5. Duty Cycle Updation under Different Irradiance Conditions
6. Comparative Performance Analysis
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A
References
- Kjaer, S.B.; Pedersen, J.K.; Blaabjerg, F. A review of single-phase grid-connected inverters for photovoltaic modules. IEEE Trans. Ind. Appl. 2005, 41, 1292–1306. [Google Scholar] [CrossRef]
- Blaabjerg, F.; Teodorescu, R.; Liserre, M.; Timbus, A.V. Overview of control and grid synchronization for distributed power generation systems. IEEE Trans. Ind. Electron. 2006, 53, 1398–1409. [Google Scholar] [CrossRef] [Green Version]
- Shaik, A.G.; Mahela, O.P. Power quality assessment and event detection in hybrid power system. Electr. Power Syst. Res. 2018, 161, 26–44. [Google Scholar] [CrossRef]
- Mahela, O.P.; Khan, B.; Alhelou, H.H.; Tanwar, S. Assessment of power quality in the utility grid integrated with wind energy generation. IET Power Electron. 2020. [Google Scholar] [CrossRef]
- Chawda, G.S.; Shaik, A.G. Performance Evaluation of Adaline Controlled Dstatcom for Multifarious Load in Weak AC Grid. In Proceedings of the 2019 IEEE PES GTD Grand International Conference and Exposition Asia (GTD Asia), Bangkok, Thailand, 19–23 March 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 356–361. [Google Scholar]
- Chawda, G.S.; Shaik, A.G. Smooth Grid Synchronization in Weak AC Grid with High Wind Energy Penetration using Distribution Static Compensator. In Proceedings of the 2019 2nd International Conference on Smart Grid and Renewable Energy (SGRE), Doha, Qatar, 19–21 November 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–6. [Google Scholar]
- Chawda, G.S.; Shaik, A.G. Adaptive Reactive Power Control of DSTATCOM in Weak AC Grid with High Wind Energy Penetration. In Proceedings of the 2019 IEEE 16th India Council International Conference (INDICON), Rajkot, India, 13–15 December 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–4. [Google Scholar]
- Chawda, G.S.; Shaik, A.G.; Mahela, O.P.; Padmanaban, S.; Holm-Nielsen, J.B. Comprehensive Review of Distributed FACTS Control Algorithms for Power Quality Enhancement in Utility Grid With Renewable Energy Penetration. IEEE Access 2020, 8, 107614–107634. [Google Scholar] [CrossRef]
- IRENA. Global Energy Transformation: A Roadmap to 2050; International Renewable Energy Agency: Abu Dhabi, UAE, 2019. [Google Scholar]
- Mahela, O.P.; Shaik, A.G. Comprehensive overview of grid interfaced solar photovoltaic systems. Renew. Sustain. Energy Rev. 2017, 68, 316–332. [Google Scholar] [CrossRef]
- Li, H.; Yang, D.; Su, W.; Lü, J.; Yu, X. An overall distribution particle swarm optimization MPPT algorithm for photovoltaic system under partial shading. IEEE Trans. Ind. Electron. 2018, 66, 265–275. [Google Scholar] [CrossRef]
- Priyadarshi, N.; Padmanaban, S.; Bhaskar, M.S.; Blaabjerg, F.; Holm-Nielsen, J.B. An improved hybrid PV-wind power system with MPPT for water pumping applications. Int. Trans. Electr. Energy Syst. 2020, 30, e12210. [Google Scholar] [CrossRef]
- Belhachat, F.; Larbes, C. A review of global maximum power point tracking techniques of photovoltaic system under partial shading conditions. Renew. Sustain. Energy Rev. 2018, 92, 513–553. [Google Scholar] [CrossRef]
- Kumar, N.; Singh, B.; Panigrahi, B.K. Integration of solar PV with Low-voltage weak grid system: Using maximize-M Kalman filter and self-tuned P&O algorithm. IEEE Trans. Ind. Electron. 2019, 66, 9013–9022. [Google Scholar]
- Kumar, N.; Singh, B.; Panigrahi, B.K.; Chakraborty, C.; Suryawanshi, H.M.; Verma, V. Integration of solar PV with low-voltage weak grid system: Using normalized Laplacian kernel adaptive Kalman filter and learning based InC algorithm. IEEE Trans. Power Electron. 2019, 34, 10746–10758. [Google Scholar] [CrossRef]
- Priyadarshi, N.; Bhaskar, M.S.; Padmanaban, S.; Blaabjerg, F.; Azam, F. New CUK–SEPIC converter based photovoltaic power system with hybrid GSA–PSO algorithm employing MPPT for water pumping applications. IET Power Electron. 2020. [Google Scholar] [CrossRef]
- Zhao, J.; Zhou, X.; Ma, Y.; Liu, Y. Analysis of dynamic characteristic for solar arrays in series and global maximum power point tracking based on optimal initial value incremental conductance strategy under partially shaded conditions. Energies 2017, 10, 120. [Google Scholar] [CrossRef] [Green Version]
- Priyadarshi, N.; Padmanaban, S.; Holm-Nielsen, J.B.; Blaabjerg, F.; Bhaskar, M.S. An Experimental Estimation of Hybrid ANFIS–PSO-Based MPPT for PV Grid Integration Under Fluctuating Sun Irradiance. IEEE Syst. J. 2019, 14, 1218–1229. [Google Scholar] [CrossRef]
- Ghasemi, M.A.; Foroushani, H.M.; Blaabjerg, F. Marginal Power-Based Maximum Power Point Tracking Control of Photovoltaic System Under Partially Shaded Condition. IEEE Trans. Power Electron. 2019, 35, 5860–5872. [Google Scholar] [CrossRef]
- Santra, S.B.; Chatterjee, D.; Kumar, K.; Bertoluzzo, M.; Sangwongwanich, A.; Blaabjerg, F. Maximum Power Point Trterfaced Converter Suitable for Maximum Power Point Tracking. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 1. [Google Scholar] [CrossRef]
- Sundareswaran, K.; Palani, S. Application of a combined particle swarm optimization and perturb and observe method for MPPT in PV systems under partial shading conditions. Renew. Energy 2015, 75, 308–317. [Google Scholar] [CrossRef]
- Daraban, S.; Petreus, D.; Morel, C. A novel MPPT (maximum power point tracking) algorithm based on a modified genetic algorithm specialized on tracking the global maximum power point in photovoltaic systems affected by partial shading. Energy 2014, 74, 374–388. [Google Scholar] [CrossRef]
- Pragallapati, N.; Sen, T.; Agarwal, V. Adaptive velocity PSO for global maximum power control of a PV array under nonuniform irradiation conditions. IEEE J. Photovoltaics 2016, 7, 624–639. [Google Scholar] [CrossRef]
- Jiang, Y.; Qahouq, J.A.A.; Haskew, T.A. Adaptive step size with adaptive-perturbation-frequency digital MPPT controller for a single-sensor photovoltaic solar system. IEEE Trans. Power Electron. 2012, 28, 3195–3205. [Google Scholar] [CrossRef]
- Pandey, A.; Dasgupta, N.; Mukerjee, A.K. High-performance algorithms for drift avoidance and fast tracking in solar MPPT system. IEEE Trans. Energy Convers. 2008, 23, 681–689. [Google Scholar] [CrossRef] [Green Version]
- Huang, Y.P.; Ye, C.E.; Chen, X. A modified firefly algorithm with rapid response maximum power point tracking for photovoltaic systems under partial shading conditions. Energies 2018, 11, 2284. [Google Scholar] [CrossRef] [Green Version]
- Pei, T.; Hao, X.; Gu, Q. A novel global maximum power point tracking strategy based on modified flower pollination algorithm for photovoltaic systems under non-uniform irradiation and temperature conditions. Energies 2018, 11, 2708. [Google Scholar] [CrossRef] [Green Version]
- Dehghani, M.; Taghipour, M.; Gharehpetian, G.B.; Abedi, M. Optimized Fuzzy Controller for MPPT of Grid-Connected PV Systems in Rapidly Changing Atmospheric Conditions. J. Mod. Power Syst. Clean Energy 2020, 1–8. [Google Scholar] [CrossRef]
- Khosravy, M.; Gupta, N.; Patel, N.; Senjyu, T. Frontier Applications of Nature Inspired Computation; Springer: Berlin, Germany, 2020. [Google Scholar]
- Dey, N. Advancements in Applied Metaheuristic Computing, 1st ed.; IGI Global: Hershey, PA, USA, 2017. [Google Scholar]
- Acharjya, D.; Anitha, A. A comparative study of statistical and rough computing models in predictive data analysis. Int. J. Ambient. Comput. Intell. (IJACI) 2017, 8, 32–51. [Google Scholar] [CrossRef] [Green Version]
- Gupta, N.; Patel, N.; Tiwari, B.N.; Khosravy, M. Genetic algorithm based on enhanced selection and log-scaled mutation technique. In Proceedings of the Future Technologies Conference; Springer: Berlin, Germany, 2018; pp. 730–748. [Google Scholar]
- Bersch, S.; Azzi, D.; Khusainov, R.; Achumba, I.E. Artificial immune systems for anomaly detection in ambient assisted living applications. Int. J. Ambient. Comput. Intell. (IJACI) 2013, 5, 1–15. [Google Scholar] [CrossRef]
- Gupta, N.; Khosravy, M.; Patel, N.; Dey, N.; Mahela, O.P. Mendelian Evolutionary Theory Optimization Algorithm. TechRxiv 2020. preprint. [Google Scholar] [CrossRef]
- Kumar, R.R.; Kumar, C. A multi criteria decision making method for cloud service selection and ranking. Int. J. Ambient. Comput. Intell. (IJACI) 2018, 9, 1–14. [Google Scholar] [CrossRef]
- Sera, D.; Kerekes, T.; Teodorescu, R.; Blaabjerg, F. Improved MPPT algorithms for rapidly changing environmental conditions. In Proceedings of the 2006 12th International Power Electronics and Motion Control Conference, Portoroz, Slovenia, 30 August–1 September 2006; IEEE: Piscataway, NJ, USA, 2006; pp. 1614–1619. [Google Scholar]
- Abdulkadir, M.; Yatim, A.; Yusuf, S. An improved PSO-based MPPT control strategy for photovoltaic systems. Int. J. Photoenergy 2014, 7, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Zolfaghari, M.; Hosseinian, S.H.; Fathi, S.H.; Abedi, M.; Gharehpetian, G.B. A new power management scheme for parallel-connected PV systems in microgrids. IEEE Trans. Sustain. Energy 2018, 9, 1605–1617. [Google Scholar] [CrossRef]
- Mahela, O.P.; Shaik, A.G. Power quality recognition in distribution system with solar energy penetration using S-transform and Fuzzy C-means clustering. Renew. Energy 2017, 106, 37–51. [Google Scholar] [CrossRef]
- Ram Ola, S.; Saraswat, A.; Goyal, S.K.; Jhajharia, S.K.; Khan, B.; Mahela, O.P.; Haes Alhelou, H.; Siano, P. A Protection Scheme for a Power System with Solar Energy Penetration. Appl. Sci. 2020, 10. [Google Scholar] [CrossRef] [Green Version]
- Çelik, Ö.; Teke, A. A Hybrid MPPT method for grid connected photovoltaic systems under rapidly changing atmospheric conditions. Electr. Power Syst. Res. 2017, 152, 194–210. [Google Scholar] [CrossRef]
- Heydari-doostabad, H.; Keypour, R.; Khalghani, M.R.; Khooban, M.H. A new approach in MPPT for photovoltaic array based on extremum seeking control under uniform and non-uniform irradiances. Sol. Energy 2013, 94, 28–36. [Google Scholar] [CrossRef]
- Zou, Y.; Yu, Y.; Zhang, Y.; Lu, J. MPPT control for PV generation system based on an improved inccond algorithm. Procedia Eng. 2012, 29, 105–109. [Google Scholar] [CrossRef] [Green Version]
- Ishaque, K.; Salam, Z.; Amjad, M.; Mekhilef, S. An improved particle swarm optimization (PSO)—Based MPPT for PV with reduced steady-state oscillation. IEEE Trans. Power Electron. 2012, 27, 3627–3638. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| MPPT Algorithms | SPV Output Power at Fix 25 °C | ||
|---|---|---|---|
| 1000 W/m | 600 W/m | 300 W/m | |
| P&O Algorithm [28] | 90.13 kW | 53.68 kW | - |
| I&C Algorithm [28] | 94.52 kW | 56.29 kW | - |
| GA-based optimized FLC [28] | 95.11 kW | 56.14 kW | - |
| PSO-based optimized FLC [28] | 96.15 kW | 56.78 kW | - |
| PSO-GA-based optimized FLC [28] | 98.85 kW | 58.64 kW | - |
| Proposed ICPSO | 97.3 W | 60 W | 94.2 W |
| MPPT Algorithms | SPV Output Power at Fix 1000 W/m | Remarks | |
|---|---|---|---|
| 25 °C | 30 °C | ||
| P&O Algorithm [28] | 90.13 kW | 86.73 kW | Conventional |
| I&C Algorithm [28] | 94.52 kW | 90.91 kW | Conventional |
| GA-based optimized FLC [28] | 95.09 kW | 89.56 kW | Large training data required |
| PSO-based optimized FLC [28] | 96.03 kW | 90.1 kW | computational complexity |
| PSO-GA-based optimized FLC [28] | 98.7 kW | 94.47 kW | Increases up to 8% of output power with high computation time |
| Proposed ICPSO | 97.3 W | 92.4 W | Increases up to 7% of output power with low computation time |
| MPPT Algorithms | Tracking Time in Simulation (Second) |
|---|---|
| Firefly [11] | 0.2 |
| Overall distribution (OD)- PSO [11] | 0.21 |
| P&O-PSO [11] | 0.28 |
| High performance MPP [25] | 0.3 |
| Load-current adaptive step-size and perturbation frequency (LCASF) [24] | 0.35 |
| PSO-GA based optimized FLC [28] | ≈0.15 |
| Proposed ICPSO | 0.1 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Singh Chawda, G.; Prakash Mahela, O.; Gupta, N.; Khosravy, M.; Senjyu, T. Incremental Conductance Based Particle Swarm Optimization Algorithm for Global Maximum Power Tracking of Solar-PV under Nonuniform Operating Conditions. Appl. Sci. 2020, 10, 4575. https://doi.org/10.3390/app10134575
Singh Chawda G, Prakash Mahela O, Gupta N, Khosravy M, Senjyu T. Incremental Conductance Based Particle Swarm Optimization Algorithm for Global Maximum Power Tracking of Solar-PV under Nonuniform Operating Conditions. Applied Sciences. 2020; 10(13):4575. https://doi.org/10.3390/app10134575
Chicago/Turabian StyleSingh Chawda, Gajendra, Om Prakash Mahela, Neeraj Gupta, Mahdi Khosravy, and Tomonobu Senjyu. 2020. "Incremental Conductance Based Particle Swarm Optimization Algorithm for Global Maximum Power Tracking of Solar-PV under Nonuniform Operating Conditions" Applied Sciences 10, no. 13: 4575. https://doi.org/10.3390/app10134575