Micro Water Flow Measurement Using a Temperature-Compensated MEMS Piezoresistive Cantilever

 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
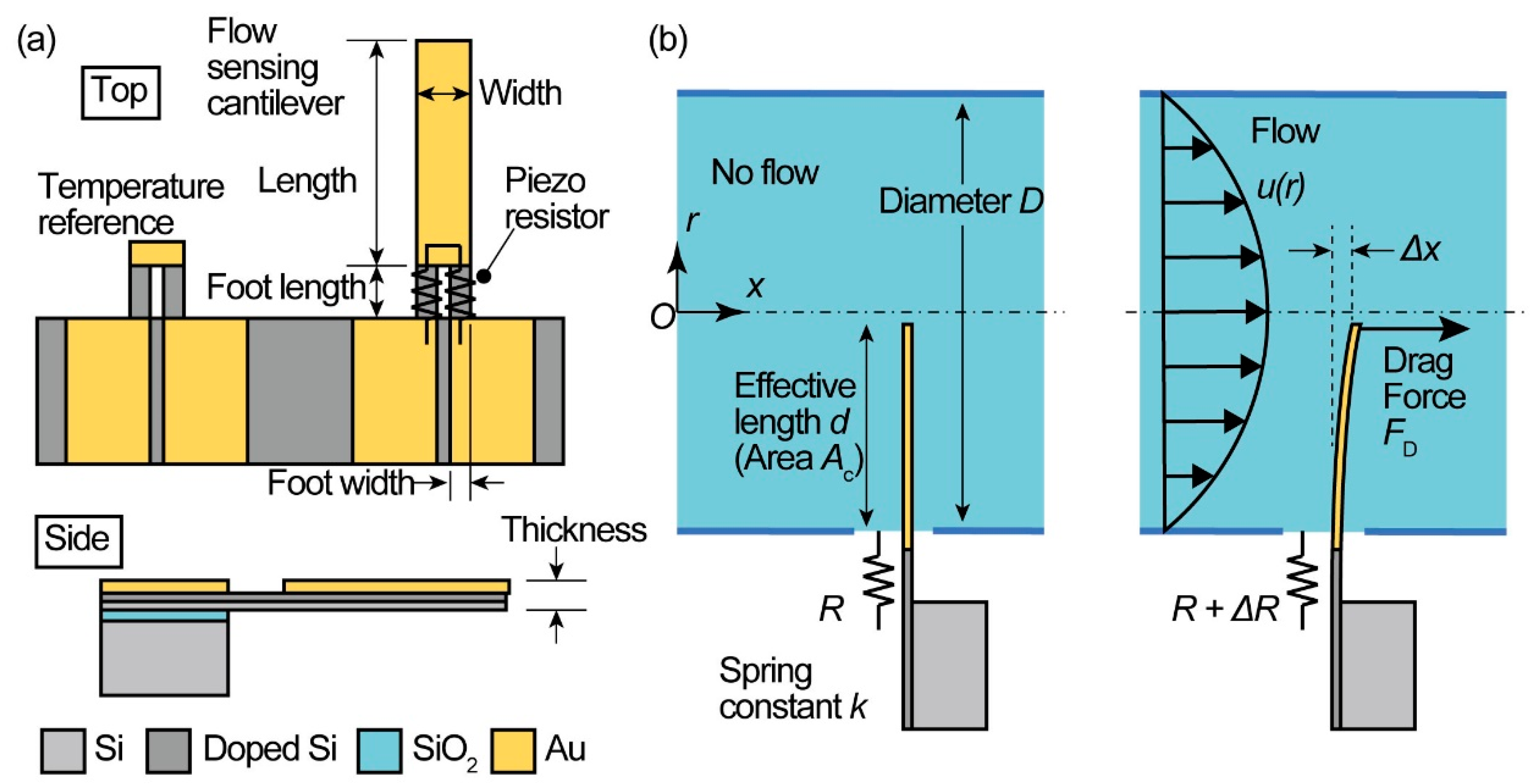
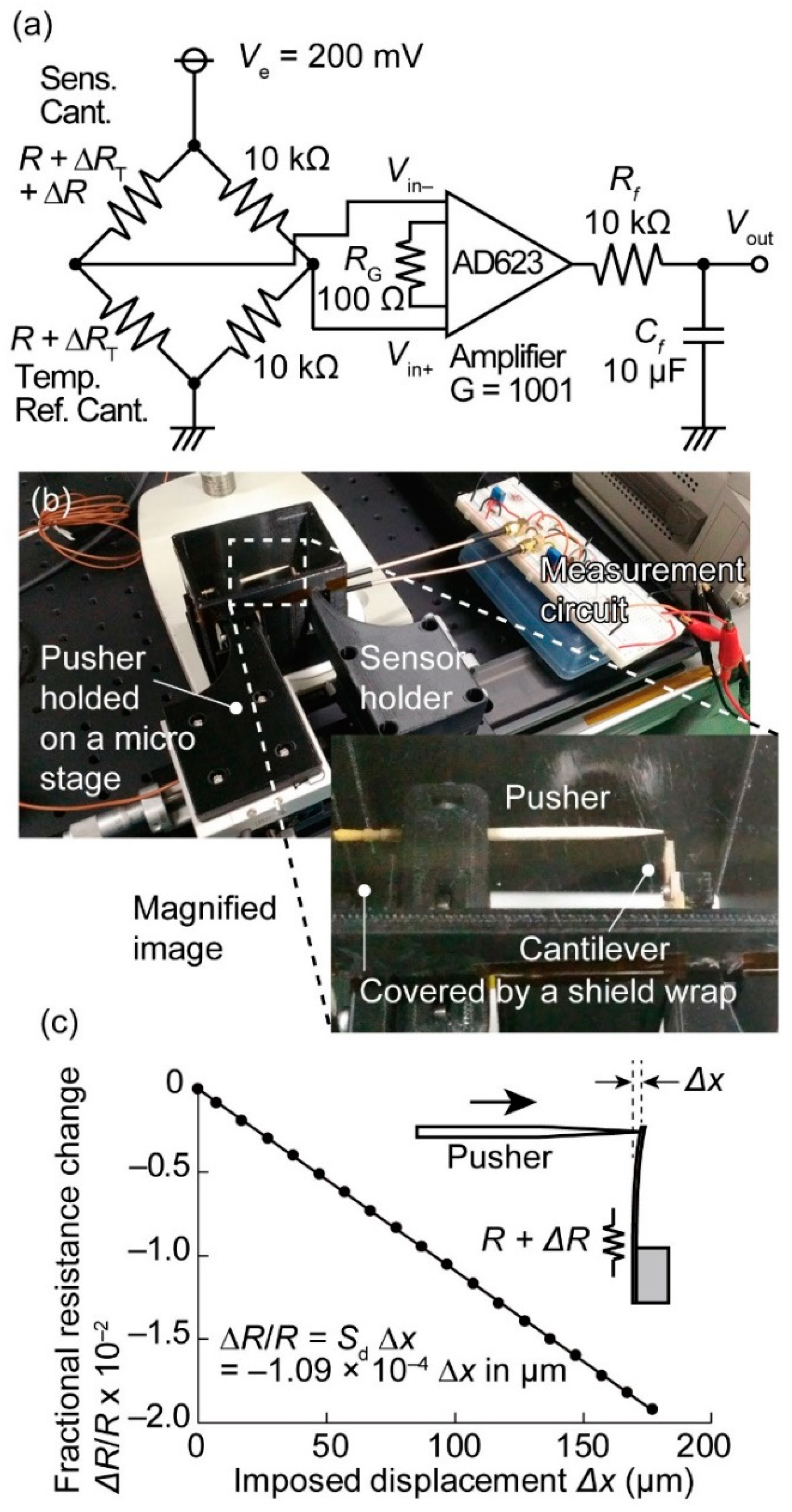
2. Measurement Principle
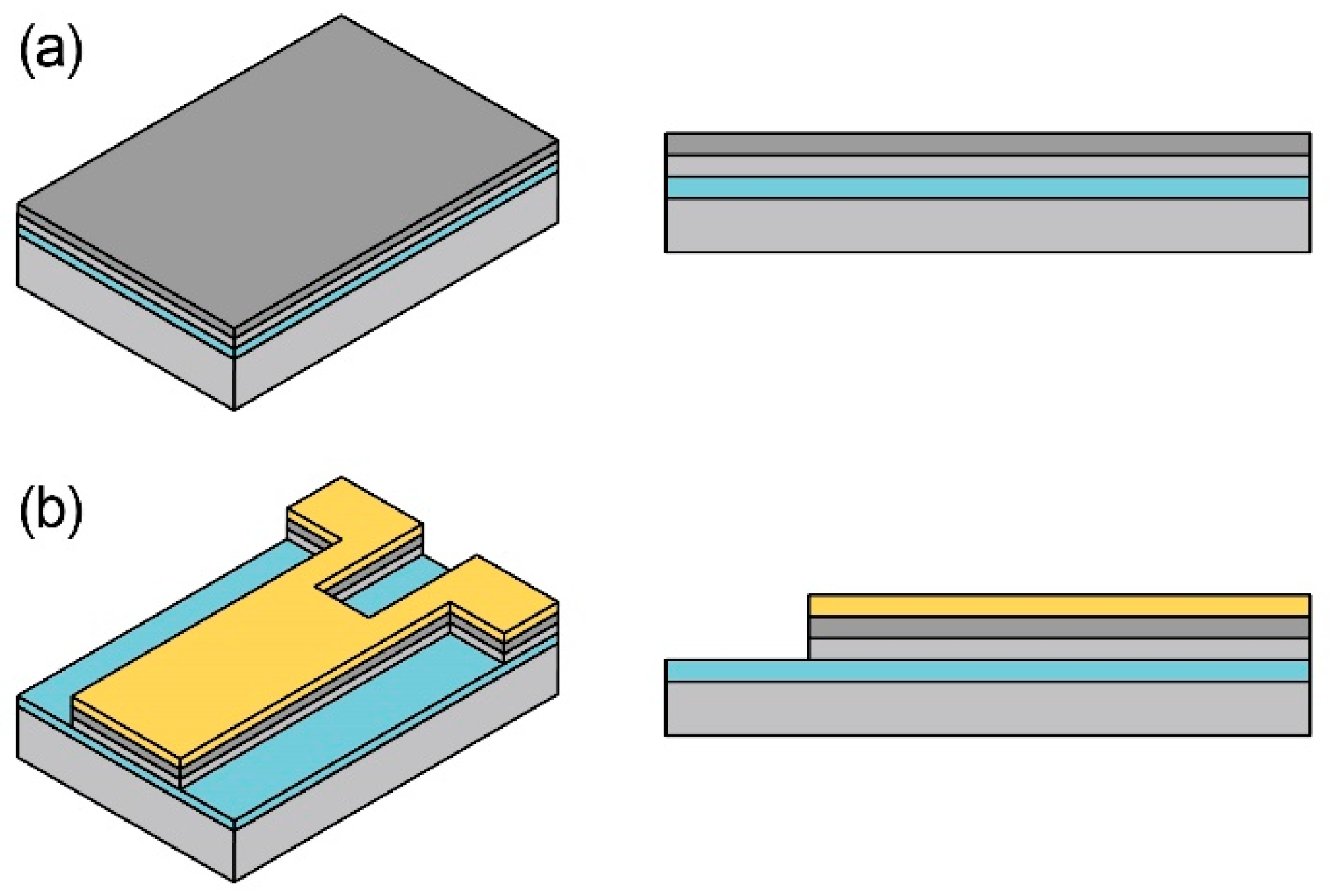
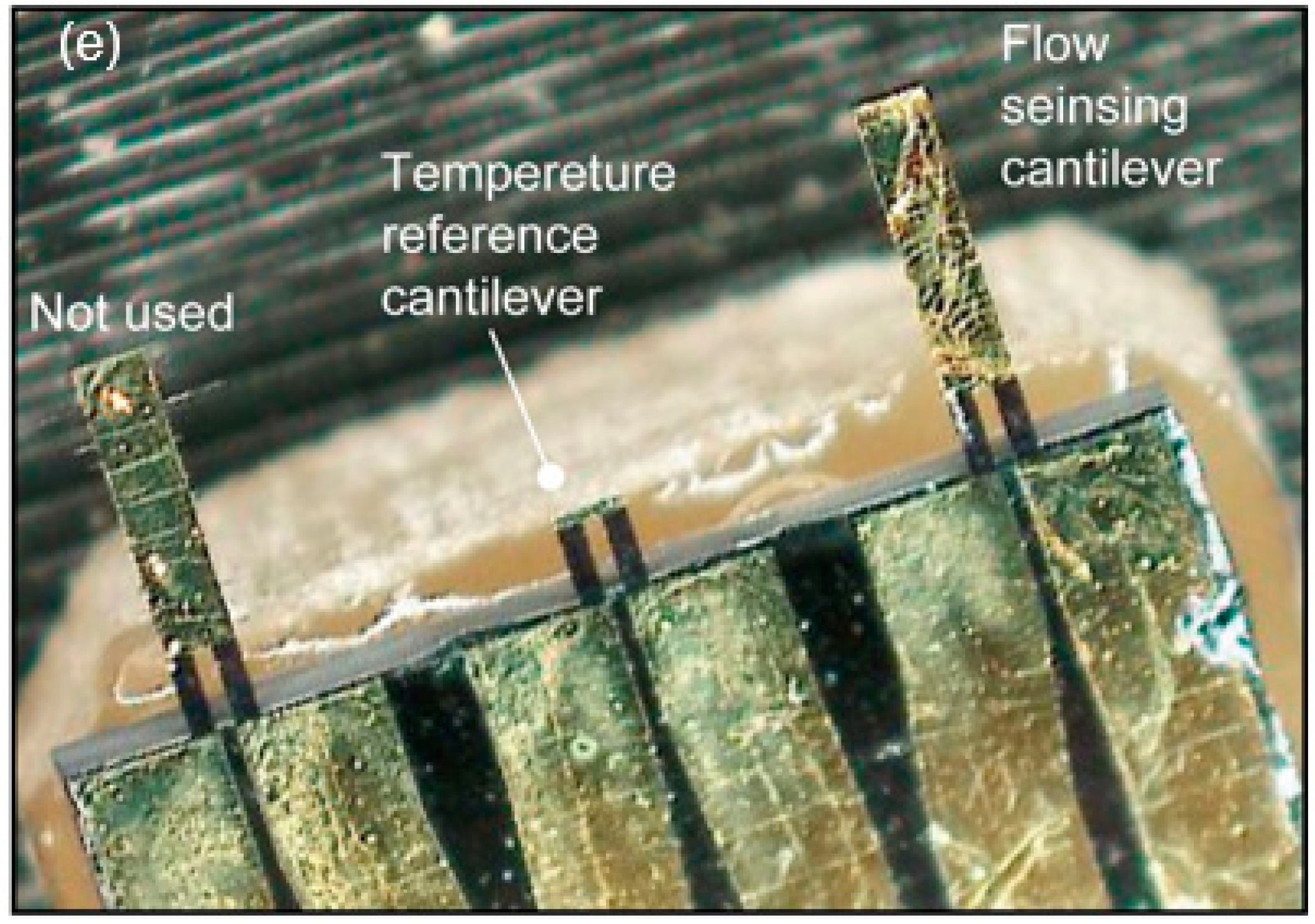
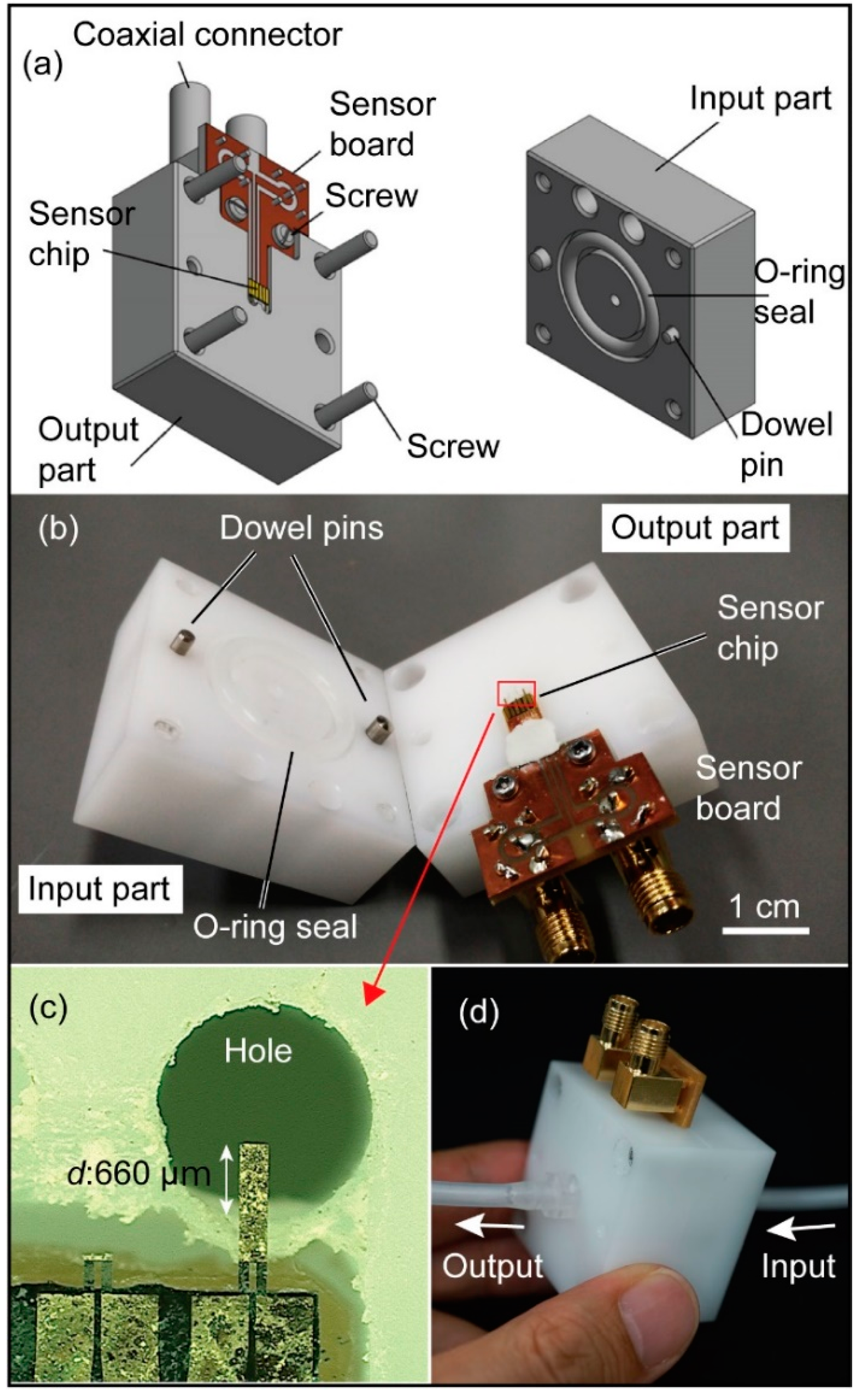
3. Fabrication and Assembly
4. Cantilever Response Measurement
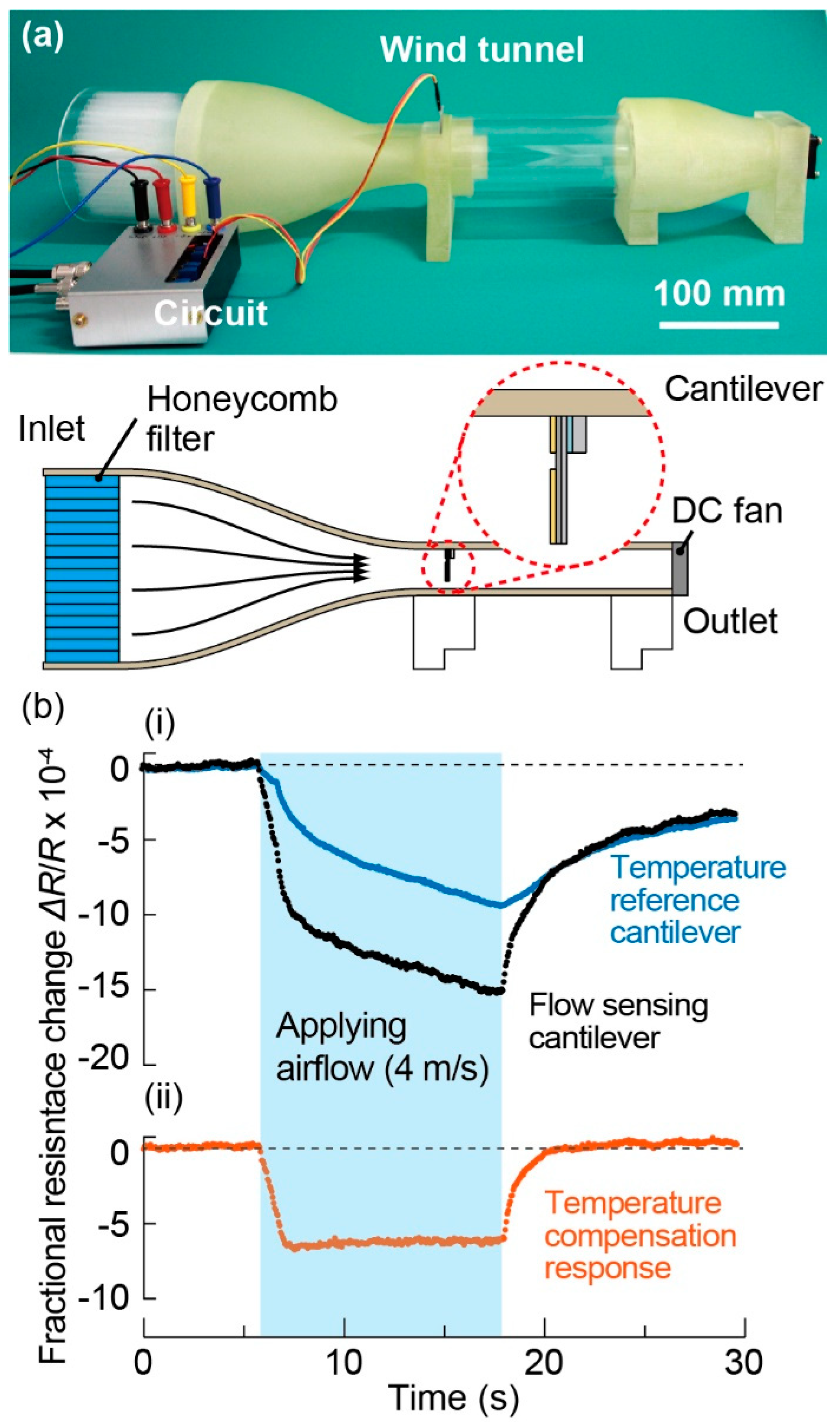
5. Temperature Compensation Effect
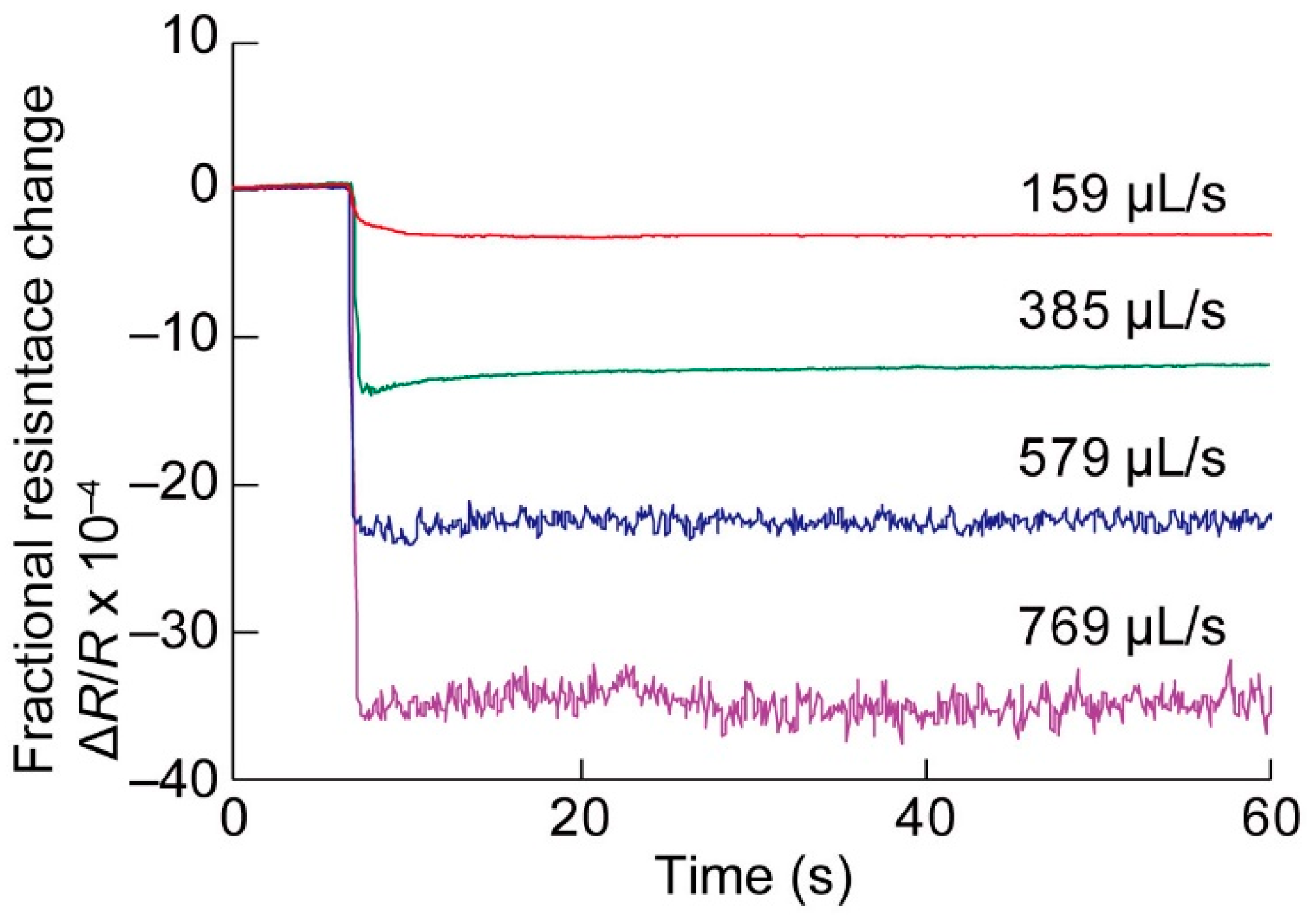
6. Water Flow Measurement
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Silvestri, S.; Schena, E. Micromachined Flow Sensors in Biomedical Applications. Micromachines 2012, 3, 225–243. [Google Scholar] [CrossRef]
- Zarifi, M.H.; SadAbadi, H.; Hejazi, S.H.; Daneshmand, M.; Nezhad, A.S. Noncontact and Nonintrusive Microwave-Microfluidic Flow Sensor for Energy and Biomedical Engineering. Sci. Rep. 2018, 8, 139. [Google Scholar] [CrossRef] [Green Version]
- Asadnia, M.; Kottapalli, A.G.P.; Haghighi, R.; Cloitre, A.; Alvarado, P.V.Y.; Miao, J.; Triantafyllou, M.S. MEMS sensors for assessing flow-related control of an underwater biomimetic robotic stingray. Bioinspir. Biomim. 2015, 10, 36008. [Google Scholar] [CrossRef]
- Smith, R.; Sparks, D.; Riley, D.; Najafi, N. A MEMS-Based Coriolis Mass Flow Sensor for Industrial Applications. IEEE Trans. Ind. Electron. 2008, 56, 1066–1071. [Google Scholar] [CrossRef]
- Lien, V.; Vollmer, F. Microfluidic flow rate detection based on integrated optical fiber cantilever. Lab Chip 2007, 7, 1352. [Google Scholar] [CrossRef]
- Ejeian, F.; Azadi, S.; Razmjou, A.; Orooji, Y.; Kottapalli, A.; Warkiani, M.E.; Asadnia, M. Design and applications of MEMS flow sensors: A review. Sens. Actuators A 2019, 295, 483–502. [Google Scholar] [CrossRef]
- Wang, Y.-H.; Chen, C.-P.; Chang, C.-M.; Lin, C.-P.; Lin, C.-H.; Fu, L.-M.; Lee, C.-Y. MEMS-based gas flow sensors. Microfluid. Nanofluid. 2009, 6, 333–346. [Google Scholar] [CrossRef]
- Kuo, J.T.W.; Yu, L.; Meng, E. Micromachined Thermal Flow Sensors—A Review. Micromachines 2012, 3, 550–573. [Google Scholar] [CrossRef] [Green Version]
- Wu, S.; Lin, Q.; Yuen, Y.; Wu, S. MEMS flow sensors for nano-fluidic applications. Sens. Actuators A 2001, 89, 152–158. [Google Scholar] [CrossRef] [Green Version]
- Ahrens, R.; Schlote-Holubek, K. A micro flow sensor from a polymer for gases and liquids. J. Micromech. Microeng. 2009, 19, 74006. [Google Scholar] [CrossRef]
- Meng, E.; Li, P.-Y.; Tai, Y.-C. A biocompatible Parylene thermal flow sensing array. Sens. Actuators A 2008, 144, 18–28. [Google Scholar] [CrossRef]
- Su, Y.; Evans, A.G.R.; Brunnschweiler, A. Micromachined silicon cantilever paddles with piezoresistive readout for flow sensing. J. Micromech. Microeng. 1996, 6, 69–72. [Google Scholar] [CrossRef]
- Nezhad, A.S.; Ghanbari, M.; Agudelo, C.G.; Packirisamy, M.; Bhat, R.B.; Geitmann, A. PDMS Microcantilever-Based Flow Sensor Integration for Lab-on-a-Chip. IEEE Sens. J. 2012, 13, 601–609. [Google Scholar] [CrossRef]
- Noeth, N.; Keller, S.; Boisen, A. Integrated Cantilever-Based Flow Sensors with Tunable Sensitivity for In-Line Monitoring of Flow Fluctuations in Microfluidic Systems. Sensors 2013, 14, 229–244. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Q.; Ruan, W.; Wang, H.; Zhou, Y.; Wang, Z.; Liu, L. A self-bended piezoresistive microcantilever flow sensor for low flow rate measurement. Sens. Actuators A 2010, 158, 273–279. [Google Scholar] [CrossRef]
- Takahashi, H.; Nakai, A.; Shimoyama, I. Waterproof airflow sensor for seabird bio-logging using a highly sensitive differential pressure sensor and nano-hole array. Sens. Actuators A 2018, 281, 243–249. [Google Scholar] [CrossRef]
- Takahashi, H.; Sato, K.; Nguyen, M.-D.; Matsumoto, K.; Shimoyama, I. Characteristic evaluation of a bristled wing using mechanical models of a thrips wings with MEMS piezoresistive cantilevers. J. Biomech. Sci. Eng. 2015, 10, 14–233. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.-H.; Lee, C.-Y.; Chiang, C.-M. A MEMS-based Air Flow Sensor with a Free-standing Micro-cantilever Structure. Sensors 2007, 7, 2389–2401. [Google Scholar] [CrossRef] [Green Version]
- Quist, A.; Chand, A.; Ramachandran, S.; Cohen, D.; Lal, R. Piezoresistive cantilever based nanoflow and viscosity sensor for microchannels. Lab Chip 2006, 6, 1450. [Google Scholar] [CrossRef]
- Chen, N.; Tucker, C.; Engel, J.M.; Yang, Y.; Pandya, S.; Liu, C. Design and Characterization of Artificial Haircell Sensor for Flow Sensing With Ultrahigh Velocity and Angular Sensitivity. J. Microelectromech. Syst. 2007, 16, 999–1014. [Google Scholar] [CrossRef]
- Su, Y.; Evans, A.G.R.; Brunnschweiler, A.; Ensell, G. Characterization of a highly sensitive ultra-thin piezoresistive silicon cantilever probe and its application in gas flow velocity sensing. J. Micromech. Microeng. 2002, 12, 780–785. [Google Scholar] [CrossRef]
- Matsudaira, K.; Takahashi, H.; Shoji, K.H.; Nguyen, T.-V.; Tsukagoshi, T.; Shimoyama, I. A MEMS-based measurement system for evaluating the force-length relationship of human induced pluripotent stem cell-derived cardiomyocytes adhered on a substrate. J. Micromech. Microeng. 2019, 29, 055003. [Google Scholar] [CrossRef]
- Nguyen, T.-V.; Kazama, R.; Takahashi, H.; Takahata, T.; Matsumoto, K.; Shimoyama, I. A wall shear stress sensor using a pair of sidewall doped cantilevers. J. Micromech. Microeng. 2017, 27, 075017. [Google Scholar] [CrossRef]
- Shekhawat, G.S. MOSFET-Embedded Microcantilevers for Measuring Deflection in Biomolecular Sensors. Science 2006, 311, 1592–1595. [Google Scholar] [CrossRef] [Green Version]
- Kang, S.-W.; Fragala, J.; Banerjee, D. Numerical Modeling and Experimental Validation by Calorimetric Detection of Energetic Materials Using Thermal Bimorph Microcantilever Array: A Case Study on Sensing Vapors of Volatile Organic Compounds (VOCs). Sensors 2015, 15, 21785–21806. [Google Scholar] [CrossRef] [Green Version]
- Zhao, R.; Sun, Y. Polymeric Flexible Immunosensor Based on Piezoresistive Micro-Cantilever with PEDOT/PSS Conductive Layer. Sensors 2018, 18, 451. [Google Scholar] [CrossRef] [Green Version]
- Jung, U.G.; Kuwana, K.; Ajiki, Y.; Takahashi, H.; Kan, T.; Takei, Y.; Noda, K.; Iwase, E.; Matsumoto, K.; Shimoyama, I. A photoresponse-compensated parallel piezoresistive cantilever for cellular force measurements. J. Micromech. Microeng. 2013, 23, 45015. [Google Scholar] [CrossRef]
- Pelletier, J.-C.; Aoyama, H.; Irie, Y.; Kanamori, C.; Piat, N. Development of a Micro-Manipulator for Bio-Targets Using Micro Flows. J. Robot. Mechatronics 2018, 30, 638–649. [Google Scholar] [CrossRef]
- Hopcroft, M.A.; Nix, W.D.; Kenny, T.W. What is the Young’s Modulus of Silicon? J. Microelectromech. Syst. 2010, 19, 229–238. [Google Scholar] [CrossRef] [Green Version]
- Gel, M.; Shimoyama, I. Force sensing submicrometer thick cantilevers with ultra-thin piezoresistors by rapid thermal diffusion. J. Micromech. Microeng. 2003, 14, 423–428. [Google Scholar] [CrossRef]
- Takahashi, H.; Dung, N.M.; Matsumoto, K.; Shimoyama, I. Differential pressure sensor using a piezoresistive cantilever. J. Micromech. Microeng. 2012, 22, 55015. [Google Scholar] [CrossRef]
- Hoerner, S.F. Fluid-Dynamic Drag: Practical Information on Aerodynamic Drag and Hydrodynamic Resistance; Hoerner Fluid Dynamics: Bricktown, NJ, USA, 1965. [Google Scholar]
- Onoe, H.; Gel, M.; Hoshino, K.; Matsumoto, K.; Shimoyama, I. Direct Measurement of the Binding Force between Microfabricated Particles and a Planar Surface in Aqueous Solution by Force-Sensing Piezoresistive Cantilevers. Langmuir 2005, 21, 11251–11261. [Google Scholar] [CrossRef] [PubMed]
- Harley, J.A.; Kenny, T.W. High-sensitivity piezoresistive cantilevers under 1000 Å thick. Appl. Phys. Lett. 1999, 75, 289–291. [Google Scholar] [CrossRef]
- Villanueva, G.; Montserrat, J.; Pérez-Murano, F.; Rius, G.; Bausells, J. Submicron piezoresistive cantilevers in a CMOS-compatible technology for intermolecular force detection. Microelectron. Eng. 2004, 73–74, 480–486. [Google Scholar] [CrossRef]
- Arlett, J.L.; Maloney, J.R.; Gudlewski, B.; Muluneh, M.; Roukes, M.L. Self-Sensing Micro- and Nanocantilevers with Attonewton-Scale Force Resolution. Nano Lett. 2006, 6, 1000–1006. [Google Scholar] [CrossRef]
- Tosolini, G.; Scarponi, F.; Cannistraro, S.; Bausells, J. Biomolecule recognition using piezoresistive nanomechanical force probes. Appl. Phys. Lett. 2013, 102, 253701. [Google Scholar] [CrossRef] [Green Version]
- Kwoka, K.; Oroowska, K.; Majstrzyk, W.; Sierakowski, A.; Janus, P.; Tomaszewski, D.; Grabiec, P.; Piasecki, T.; Gotszalk, T. Soft piezoresistive cantilevers for adhesion force measurements. Sens. Actuators A. 2020, 301, 111747. [Google Scholar] [CrossRef]
- Takahashi, H.; Kan, T.; Matsumoto, K.; Shimoyama, I. Simultaneous detection of particles and airflow with a MEMS piezoresistive cantilever. Meas. Sci. Technol. 2013, 24, 025107. [Google Scholar] [CrossRef]










© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pommois, R.; Furusawa, G.; Kosuge, T.; Yasunaga, S.; Hanawa, H.; Takahashi, H.; Kan, T.; Aoyama, H. Micro Water Flow Measurement Using a Temperature-Compensated MEMS Piezoresistive Cantilever. Micromachines 2020, 11, 647. https://doi.org/10.3390/mi11070647
Pommois R, Furusawa G, Kosuge T, Yasunaga S, Hanawa H, Takahashi H, Kan T, Aoyama H. Micro Water Flow Measurement Using a Temperature-Compensated MEMS Piezoresistive Cantilever. Micromachines. 2020; 11(7):647. https://doi.org/10.3390/mi11070647
Chicago/Turabian StylePommois, Romain, Gaku Furusawa, Takuya Kosuge, Shun Yasunaga, Haruki Hanawa, Hidetoshi Takahashi, Tetsuo Kan, and Hisayuki Aoyama. 2020. "Micro Water Flow Measurement Using a Temperature-Compensated MEMS Piezoresistive Cantilever" Micromachines 11, no. 7: 647. https://doi.org/10.3390/mi11070647