
Abstract
This article mainly explores a class of inertial proportional delayed neural networks. Abstaining reduced order strategy, a novel approach involving differential inequality technique and Lyapunov function fashion is presented to open out that all solutions of the considered system with their derivatives are convergent to zero vector, which refines some previously known research. Moreover, an example and its numerical simulations are given to display the exactness of the proposed approach.
Similar content being viewed by others

1 Introduction
In neural networks dynamics, inertial neural networks can be described as second-order differential equations, and the inertial term is used as a convenient tool for causing bifurcation and chaos [1, 2]. Consequently, dynamic analyses on constant delayed inertial neural networks have been extensively explored, and plentiful important results have been gained in [3–11] and the references cited therein. It should be adverted to that all research approaches involved in the above papers are on the base of the reduced order strategy, which will produce a large amount of computation and has no practical value. Therefore, the authors in [12, 13] used non-reduced order strategy to explore the synchronization and stability in inertial neural networks. As is well known, the neural networks involving time-varying parameters will have more practical issues [14–16]. In particular, taking the global Lipschitz activation functions, the authors in [12, 13] applied some novel Lyapunov functionals instead of the classical reduced order strategy and established a set of new conditions to illustrate the dynamic behaviors such as synchronization and stability in non-autonomous inertial neural networks. Yet in some applications, activation functions without Lipschitz conditions are inevitably encountered. However, there is little research on the convergence of non-autonomous inertial neural networks without taking the global Lipschitz requirements in activation functions.
For the last few years, the dynamics in proportional delayed neural networks have attracted widespread concern because of biological and physical applications (see [17–22]). Particularly, the global convergence of proportional delayed neural networks without inertial terms has been widely studied in [23–30]. Unfortunately, so far, there has been no publishing article using non-reduced order strategy to establish the global convergence analysis on inertial proportional delayed neural networks without global Lipschitz activation functions.
On account of the above considerations, in this paper, our aim is to utilize the non-reduced order strategy to deal with the global convergence of the following inertial proportional delayed neural networks:
involving initial values
where \(t\geq t_{0}>0\), \(\tau_{i}= \min_{1\leq j\leq n}\{q_{ij}\}\), \(\bar{c}_{ij}, \bar{d}_{ij} :\mathbb{R}\rightarrow\mathbb{R}\), and \(\bar{a}_{i},\bar{b}_{i} :\mathbb{R}\rightarrow(0, +\infty)\) are continuous and bounded, and \(i,j\in Q= \{1,2,\ldots,n\}\), \(z_{i}''(t)\) is called an inertial term of (1.1), \(z(t)=(z_{1}(t), z_{2}(t),\ldots, z_{n}(t))\) is the state vector, proportional delay factor \(q _{ij} \) satisfies the conditions that \(0 < q _{ij} < 1\), \(J_{i}(t)\) is the continuous external input, and the continuous activation functions \(G_{j} \) and \(F_{j} \) involve two nonnegative constants \(L^{F}_{j}\) and \(L^{G}_{j}\) satisfying
which abstain the global Lipschitz conditions.
Remark 1.1
Via the step and step approach, one can prove the existence and uniqueness for every solution of initial value problem (1.1) and (1.2) on \([t_{0}, +\infty)\).
The remainder of this paper is organized as follows. We apply Barbalat’s lemma to set the main result in Sect. 2. The validity of our methods is shown by an application example in Sect. 3. Finally, Sect. 4 concludes the paper with discussion.
2 Global convergence of inertial proportional delayed neural networks
Lemma 2.1
(see [31, Barbalat’s lemma])
Let\(g (t)\)be uniformly continuous on\([t_{0}, +\infty)\)and\(\int_{t_{0}}^{+\infty}g(s)\,ds<+\infty\), then\(\lim_{t\rightarrow+\infty} g(t) =0\).
Theorem 2.1
Suppose that (1.3) holds, and the following assumptions are satisfied:
- \((T_{1})\):
-
\(W(t)= \int_{t_{0}}^{t}w(s)\,ds\)is bounded on\([t_{0}, +\infty)\), where\(w(t)=\max_{i\in Q}|J_{i}(t)|\).
- \((T_{2})\):
-
For\(i, j\in Q\), \(\bar{a}_{i}' (t)\), \(\bar{b}_{i} '(t)\)and\((|\bar{c}_{ij}(t)|L^{F}_{j} +|\bar{d}_{ij}(t)|L^{G}_{j})'\)are bounded and continuous on\([t_{0}, +\infty)\).
- \((T_{3})\):
-
There are constants\(\alpha_{i}\geq0\), \(\beta_{i}>0\), and\(\gamma_{i}\geq0\)such that
$$ \sup_{t\in[t_{0}, +\infty)}A_{i} (t)< 0,\qquad \inf _{t\in [t_{0}, +\infty)} \bigl\{ 4A_{i}(t)B_{i }(t)- C_{i}^{2}(t)\bigr\} >0, \quad\forall i\in Q, $$(2.1)where
$$\left \{ \textstyle\begin{array}{l} A_{i}(t) = \alpha_{i}\gamma_{i}-\bar{a}_{i}(t)\alpha_{i}^{2} + \frac{1}{2}\alpha_{i}^{2}\sum_{j=1}^{n}( \vert \bar{c}_{ij}(t) \vert L^{F}_{j} + \vert \bar{d}_{ij}(t) \vert L^{G}_{j}) , \\ B_{i}(t) = -\bar{b}_{i}(t)\alpha_{i}\gamma_{i} +\frac{1}{2}\sum_{j=1}^{n}( \vert \bar{c}_{ij}(t) \vert L^{F}_{j}+ \vert \bar {d}_{ij}(t) \vert L^{G}_{j} ) \vert \alpha_{i}\gamma_{i} \vert \\ \phantom{B_{i}(t) =}{}+\frac{1}{2}\sum_{j=1}^{n}\alpha_{j}^{2}( \vert \bar{c}_{ji}(t) \vert L^{F}_{i} + \bar{d}_{ji}^{+} L^{G}_{i}\frac{1}{q _{ji} } ) +\frac{1}{2}\sum_{j=1}^{n}( \vert \bar{c}_{ji}(t) \vert L^{F}_{i} + \bar{d}_{ji}^{+} L^{G}_{i}\frac{1}{q _{ji} } ) \vert \alpha_{j}\gamma_{j} \vert , \\ C_{i}(t) = \beta_{i}+\gamma_{i}^{2} -\bar{a}_{i}(t)\alpha_{i}\gamma_{i}-\bar{b}_{i}(t)\alpha_{i}^{2}, \quad\bar {d}_{ij}^{+}=\sup_{t\in\mathbb{R}} \vert \bar{d}_{ij}(t) \vert , i,j\in Q . \end{array}\displaystyle \right . $$
Moreover, label\(z (t)=(z_{1}(t), z_{2}(t),\ldots, z_{n}(t))\)as a solution of the initial value problem of (1.1) and (1.2). Then
Proof
From \((T_{1})\), \((T_{3})\), one can see that there exist constants \(\sigma,\delta\in(0, +\infty)\) satisfying
Define
In view of \((T_{1})\) and (1.1), we have
From (1.3) and the fact that \(uv \leq\frac{1}{2} (u^{2} + v^{2})\) (\(u, v\in\mathbb{R}\)), one gains
and
which, together with \((T_{3})\), (2.2), and (2.3), yield
Consequently, \(U (t)\leq U (t_{0})\) holds on \(t \in[t_{0}, +\infty)\), and
Note that
one can obtain the uniform boundedness of \(z '_{i}(t)\) and \(z_{i}(t)\) on \([t_{0}, +\infty)\), where \(i\in Q\). This entails the uniform boundedness of \(z ''_{i}(t)\) for all \(t\in[t_{0}, +\infty)\) and \(i\in Q\). Clearly, on \([t_{0}, +\infty)\), it follows from \((T_{2}) \) that \(\sum_{i=1}^{n} ( z '_{i}(t)+\frac{C_{i} (t)}{2A_{i} (t)}z_{i}(t))^{2}\) and \(\sum_{i=1}^{n} z_{i}^{2}(t)\) are uniformly continuous for all \(i\in Q\).
Furthermore, (2.4) leads to
and
This and Lemma 2.1 suggest that
which finishes the proof of Theorem 2.1. □
Remark 2.1
Most recently, taking the global Lipschitz activation functions, the authors in [12, 13] applied the non-reduced order strategy to reveal the convergence on the state vectors of inertial constant delayed neural networks. Unfortunately, the authors in [12, 13] have not given any opinion on the convergence of the inertial proportional delayed neural networks without choosing global Lipschitz activation functions. In this present paper, without taking the global Lipschitz activation functions, the convergence for all solutions and their derivatives in inertial proportional delayed neural networks are established. Therefore, compared with the methods in references [12] and [13], our method has fewer conditions and a simpler proof.
3 An illustrative numerical example
In this section, an example is given to reveal analytical results obtained in the previous sections graphically.
Example 3.1
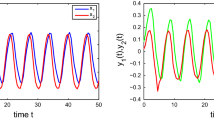
Consider model (1.1) with the following proportional delays and time-varying coefficients:
where \(t\geq t_{0}=1\), \(F_{1}(u) = G_{1}(u) = 0.25(|u + 1|-|u-1|)\), \(F_{2}(u) = G_{2}(u) = 0.5 u\sin u\).
Choose \(\alpha_{i}=\gamma_{i}=1\), \(\beta_{1}=3.8\), \(\beta_{2}=5.3\), \(L^{F}_{i} = L^{G}_{i} =0.5\), \(i=1,2\), one can show that \((T_{1})\), \((T_{2})\), \((T_{3})\), and (1.3) are satisfied in system (3.1). Hence, from Theorem 2.1, we can obtain that all state vectors of (3.1) and their derivatives converge to zero vector. The simulation results are given in Fig. 1 and Fig. 2.


Remark 3.1
As far as the authors know, no one has used the non-reduced order strategy to study the global convergence of inertial proportional delay neural networks without the global Lipschitz activation functions. Moreober, the results in [35–89] have not touched on the global convergence of inertial proportional delay neural networks. It should be noted that the global Lipschitz assumption about the activation function is not applicable to system (3.1), and we can easily discover that all achievements in [3–13] and [32–89] cannot be directly used to establish the global convergence of (3.1).
4 Conclusions
In this paper, the global convergence of a class of inertial proportional delayed neural networks without the global Lipschitz activation functions is explored without involving the reduced order strategy. Some sufficient assertions have been obtained by using novel Lyapunov function and differential inequality. It is worth noting that the conditions adopted in this manuscript are easy to be checked with simple inequality strategy, which provides a possible approach for the investigation of dynamic behavior on other delayed neural networks with inertial terms and without the global Lipschitz activation functions.
References
Babcock, K., Westervelt, R.: Stability and dynamics of simple electronic neural networks with added inertia. Physica D 23, 464–469 (1986)
Babcock, K., Westervelt, R.: Dynamics of simple electronic neural networks. Physica D 28, 305–316 (1987)
Cai, Z., Huang, J., Huang, L.: Periodic orbit analysis for the delayed Filippov system. Proc. Am. Math. Soc. 146, 4667–4682 (2018)
Li, J., Ying, J., Xie, D.: On the analysis and application of an ion size-modified Poisson–Boltzmann equation. Nonlinear Anal., Real World Appl. 47, 188–203 (2019)
Huang, C., Qiao, Y., Huang, L., Agarwal, R.P.: Dynamical behaviors of a food-chain model with stage structure and time delays. Adv. Differ. Equ. 2018, 186 (2018). https://doi.org/10.1186/s13662-018-1589-8
Rakkiyappan, R., Premalatha, S., Chandrasekar, A., Cao, J.: Stability and synchronization analysis of inertial memristive neural networks with time delays. Cogn. Neurodyn. 10, 437–451 (2016)
Wang, J., Tian, L.: Global Lagrange stability for inertial neural networks with mixed time varying delays. Neurocomputing 235, 140–146 (2017)
Tu, Z., Cao, J., Alsaedi, A., Alsaadi, F.: Global dissipativity of memristor-based neutral type inertial neural networks. Neural Netw. 88, 125–133 (2017)
Li, X., Liu, Z., Li, J.: Existence and controllability for nonlinear fractional control systems with damping in Hilbert spaces. Acta Mech. Sin. Engl. Ser. 39(1), 229–242 (2019)
Zhu, K., Xie, Y., Zhou, F.: Pullback attractors for a damped semilinear wave equation with delays. Acta Math. Sin. Engl. Ser. 34(7), 1131–1150 (2018)
Zhao, J., Liu, J., Fang, L.: Anti-periodic boundary value problems of second-order functional differential equations. Bull. Malays. Math. Sci. Soc. 37(2), 311–320 (2014)
Zhang, J., Huang, C.: Dynamics analysis on a class of delayed neural networks involving inertial terms. Adv. Differ. Equ. (2020). https://doi.org/10.1186/s13662-020-02566-4
Huang, C., Liu, B.: New studies on dynamic analysis of inertial neural networks involving non-reduced order method. Neurocomputing 325, 283–287 (2019)
Huang, C., Long, X., Cao, J.: Stability of antiperiodic recurrent neural networks with multiproportional delays. Math. Methods Appl. Sci. (2020). https://doi.org/10.1002/mma.6350
Huang, C., Wen, S., Huang, L.: Dynamics of anti-periodic solutions on shunting inhibitory cellular neural networks with multi-proportional delays. Neurocomputing 357, 47–52 (2019)
Huang, C., Zhang, H.: Periodicity of non-autonomous inertial neural networks involving proportional delays and non-reduced order method. Int. J. Biomath. 12(2), 1950016 (2019)
Liu, B.: Finite-time stability of CNNs with neutral proportional delays and time-varying leakage delays. Math. Methods Appl. Sci. 40, 167–174 (2017)
Chen, T., Huang, L., Yu, P., Huang, W.: Bifurcation of limit cycles at infinity in piecewise polynomial systems. Nonlinear Anal., Real World Appl. 41, 82–106 (2018)
Yang, X., Wen, S., Liu, Z., Li, C., Huang, C.: Dynamic properties of foreign exchange complex network. Mathematics 7, 832 (2019). https://doi.org/10.3390/math7090832
Iswarya, M., Raja, R., Rajchakit, G., Cao, J., Alzabut, J., Huang, C.: Existence, uniqueness and exponential stability of periodic solution for discrete-time delayed BAM neural networks based on coincidence degree theory and graph theoretic method. Mathematics 7(11), 1055 (2019). https://doi.org/10.3390/math7111055
Xiao, S.: Almost periodic cellular neural networks with neutral-type proportional delays. J. Exp. Theor. Artif. Intell. 30(2), 319–330 (2018)
Huang, Z.: Almost periodic solutions for fuzzy cellular neural networks with multi-proportional delays. Int. J. Mach. Learn. Cybern. 8, 1323–1331 (2017)
Zhang, H.: Global large smooth solutions for 3-D hall-magnetohydrodynamics. Discrete Contin. Dyn. Syst. 39(11), 6669–6682 (2019)
Yang, G.: Exponential stability of positive recurrent neural networks with multi-proportional delays. Neural Process. Lett. 49, 67–78 (2019)
Yang, G., Wan, W.: New results on convergence of CNNs with neutral type proportional delays and D operator. Neural Process. Lett. 49, 321–330 (2019)
Xu, Y., Cao, Q., Guo, X.: Stability on a patch structure Nicholson’s blowflies system involving distinctive delays. Appl. Math. Lett. 105, 106340 (2020). https://doi.org/10.1016/j.aml.2020.106340
Li, W., Huang, L., Ji, J.: Periodic solution and its stability of a delayed Beddington–DeAngelis type predator–prey system with discontinuous control strategy. Math. Methods Appl. Sci. 42(13), 4498–4515 (2019)
Yu, Y.: Global exponential convergence for a class of neutral functional differential equations with proportional delays. Math. Methods Appl. Sci. 39, 4520–4525 (2016)
Hu, H., Yi, T., Zou, X.: On spatial-temporal dynamics of Fisher–KPP equation with a shifting environment. Proc. Am. Math. Soc. 148(1), 213–221 (2020)
Zhou, L.: Delay-dependent exponential stability of cellular neural networks with multi-proportional delays. Neural Process. Lett. 38, 347–359 (2013)
Popov, V.: Hyperstability of Control Systems. Springer, New York (1973)
Huang, C., Yang, L., Liu, B.: New results on periodicity of non-autonomous inertial neural networks involving non-reduced order method. Neural Process. Lett. 50, 595–606 (2019)
Huang, C.: Exponential stability of inertial neural networks involving proportional delays and non-reduced order method. J. Exp. Theor. Artif. Intell. 32(1), 133–146 (2020). https://doi.org/10.1080/0952813X.2019.1635654
Xu, Y.: Convergence on non-autonomous inertial neural networks with unbounded distributed delays. J. Exp. Theor. Artif. Intell. 32(3), 503–513 (2020). https://doi.org/10.1080/0952813X.2019.1652941
Huang, C., Yang, L., Cao, J.: Asymptotic behavior for a class of population dynamics. AIMS Math. (2020). https://doi.org/10.3934/math.2020218
Long, X., Gong, S.: New results on stability of Nicholson’s blowflies equation with multiple pairs of time-varying delays. Appl. Math. Lett. 100, 106027 (2020). https://doi.org/10.1016/j.aml.2019.106027
Huang, C., Zhang, H., Huang, L.: Almost periodicity analysis for a delayed Nicholson’s blowflies model with nonlinear density-dependent mortality term. Commun. Pure Appl. Anal. 18(6), 3337–3349 (2019)
Duan, L., Fang, X., Huang, C.: Global exponential convergence in a delayed almost periodic Nicholson’s blowflies model with discontinuous harvesting. Math. Methods Appl. Sci. 41(5), 1954–1965 (2018)
Huang, C., Zhang, H., Cao, J., Hu, H.: Stability and Hopf bifurcation of a delayed prey–predator model with disease in the predator. Int. J. Bifurc. Chaos 29(7), 1950091 (2019)
Huang, C., Yang, X., Cao, J.: Stability analysis of Nicholson’s blowflies equation with two different delays. Math. Comput. Simul. 171, 201–206 (2020). https://doi.org/10.1016/j.matcom.2019.09.023
Tan, Y., Huang, C., Sun, B., Wang, T.: Dynamics of a class of delayed reaction–diffusion systems with Neumann boundary condition. J. Math. Anal. Appl. 458(2), 1115–1130 (2018)
Huang, C., Yang, H., Cao, J.: Weighted pseudo almost periodicity of multi-proportional delayed shunting inhibitory cellular neural networks with D operator. Discrete Contin. Dyn. Syst., Ser. S (2020). https://doi.org/10.3934/dcdss.2020372
Huang, C., Yang, Z., Yi, T., Zou, X.: On the basins of attraction for a class of delay differential equations with non-monotone bistable nonlinearities. J. Differ. Equ. 256(7), 2101–2114 (2014)
Zhang, X., Hu, H.: Convergence in a system of critical neutral functional differential equations. Appl. Math. Lett. 107, 106385 (2020). https://doi.org/10.1016/j.aml.2020.106385
Hu, H., Zou, X.: Existence of an extinction wave in the Fisher equation with a shifting habitat. Proc. Am. Math. Soc. 145(11), 4763–4771 (2017)
Huang, C., Su, R., Cao, J., Xiao, S.: Asymptotically stable high-order neutral cellular neural networks with proportional delays and D operators. Math. Comput. Simul. (2020). https://doi.org/10.1016/j.matcom.2019.06.001
Wang, J., Huang, C., Huang, L.: Discontinuity-induced limit cycles in a general planar piecewise linear system of saddle-focus type. Nonlinear Anal. Hybrid Syst. 33, 162–178 (2019)
Wang, J., Chen, X., Huang, L.: The number and stability of limit cycles for planar piecewise linear systems of node-saddle type. J. Math. Anal. Appl. 469(1), 405–427 (2019)
Qian, C.: New periodic stability for a class of Nicholson’s blowflies models with multiple different delays. Int. J. Control (2020). https://doi.org/10.1080/00207179.2020.1766118
Huang, L., Su, H., Tang, G., Wang, J.: Bilinear forms graphs over residue class rings. Linear Algebra Appl. 523, 13–32 (2017)
Cao, Q., Wang, G., Qian, C.: New results on global exponential stability for a periodic Nicholson’s blowflies model involving time-varying delays. Adv. Differ. Equ. (2020). https://doi.org/10.1186/s13662-020-2495-4
Huang, C., Long, X., Huang, L., Fu, S.: Stability of almost periodic Nicholson’s blowflies model involving patch structure and mortality terms. Can. Math. Bull. (2019). https://doi.org/10.4153/S0008439519000511
Peng, J., Zhang, Y.: Heron triangles with figurate number sides. Acta Math. Hung. 157(2), 478–488 (2019)
Wang, F., Yao, Z.: Approximate controllability of fractional neutral differential systems with bounded delay. Fixed Point Theory 17, 495–508 (2016)
Liu, W.: An incremental approach to obtaining attribute reduction for dynamic decision systems. Open Math. 14, 875–888 (2016)
Huang, L., Lv, B.: Cores and independence numbers of Grassmann graphs. Graphs Comb. 33(6), 1607–1620 (2017)
Huang, L., Huang, J., Zhao, K.: On endomorphisms of alternating forms graph. Discrete Math. 338(3), 110–121 (2015)
Xu, Y., Cao, Q., Guo, X.: Stability on a patch structure Nicholson’s blowflies system involving distinctive delays. Appl. Math. Lett. 36, 106340 (2020). https://doi.org/10.1016/j.aml.2020.106340
Hu, H., Yuan, X., Huang, L., Huang, C.: Global dynamics of an SIRS model with demographics and transfer from infectious to susceptible on heterogeneous networks. Math. Biosci. Eng. 16(5), 5729–5749 (2019)
Wei, Y., Yin, L., Long, X.: The coupling integrable couplings of the generalized coupled Burgers equation hierarchy and its Hamiltonian structure. Adv. Differ. Equ. 2019, 58 (2019). https://doi.org/10.4153/S0008439519000511
Zhang, J., Lu, C., Li, X., Kim, H.-J., Wang, J.: A full convolutional network based on DenseNet for remote sensing scene classification. Math. Biosci. Eng. 16(5), 3345–3367 (2019)
Hu, H., Liu, L.: Weighted inequalities for a general commutator associated to a singular integral operator satisfying a variant of Hormander’s condition. Math. Notes 101(5–6), 830–840 (2017)
Lv, B., Huang, Q., Wang, K.: Endomorphisms of twisted Grassmann graphs. Graphs Comb. 33(1), 157–169 (2018)
Huang, L.: Generalized bilinear forms graphs and MRD codes over a residue class ring. Finite fields and their applications. Finite Fields Appl. 51, 306–324 (2018)
Li, L., Jin, Q., Yao, B.: Regularity of fuzzy convergence spaces. Open Math. 16, 1455–1465 (2018)
Huang, C., Liu, L.: Boundedness of multilinear singular integral operator with non-smooth kernels and mean oscillation. Quaest. Math. 40(3), 295–312 (2017)
Huang, C., Cao, J., Wen, F., Yang, X.: Stability analysis of SIR model with distributed delay on complex networks. PLoS ONE 11(8), e0158813 (2016). https://doi.org/10.1371/journal.pone.0158813
Li, X., Liu, Y., Wu, J.: Flocking and pattern motion in a modified Cucker–Smale model. Bull. Korean Math. Soc. 53(5), 1327–1339 (2016)
Xie, Y., Li, Q., Zhu, K.: Attractors for nonclassical diffusion equations with arbitrary polynomial growth nonlinearity. Nonlinear Anal., Real World Appl. 31, 23–37 (2016)
Xie, Y., Li, Y., Zeng, Y.: Uniform attractors for nonclassical diffusion equations with memory. J. Funct. Spaces 2016, Article ID 5340489 (2016). https://doi.org/10.1155/2016/5340489
Wang, F., Wang, P., Yao, Z.: Approximate controllability of fractional partial differential equation. Adv. Differ. Equ. 2015, 367 (2015). https://doi.org/10.1186/s13662-015-0692-3
Liu, Y., Wu, J.: Multiple solutions of ordinary differential systems with min-max terms and applications to the fuzzy differential equations. Adv. Differ. Equ. 2015, 379 (2015). https://doi.org/10.1186/s13662-015-0708-z
Yan, L., Liu, J., Luo, Z.: Existence and multiplicity of solutions for second-order impulsive differential equations on the half-line. Adv. Differ. Equ. 2013, 293 (2013). https://doi.org/10.1186/1687-1847-2013-293
Liu, Y., Wu, J.: Fixed point theorems in piecewise continuous function spaces and applications to some nonlinear problems. Math. Methods Appl. Sci. 37(4), 508–517 (2014)
Tong, D., Wang, W.: Conditional regularity for the 3D MHD equations in the critical Besov space. Appl. Math. Lett. 102, 106119 (2020). https://doi.org/10.1016/j.aml.2019.106119
Cai, Y., Wang, K., Wang, W.: Global transmission dynamics of a Zika virus model. Appl. Math. Lett. 92, 190–195 (2019)
Qian, C., Hu, Y.: Novel stability criteria on nonlinear density-dependent mortality Nicholson’s blowflies systems in asymptotically almost periodic environments. J. Inequal. Appl. (2020). https://doi.org/10.1186/s13660-019-2275-4
Zhou, S., Jiang, Y.: Finite volume methods for N-dimensional time fractional Fokker–Planck equations. Bull. Malays. Math. Sci. Soc. 42(6), 3167–3186 (2019)
Huang, C., Wen, S. Li, M., Wen, F., Yang, X.: An empirical evaluation of the influential nodes for stock market network: Chinese A shares case. Finance Res. Lett. (2020). https://doi.org/10.1016/j.frl.2020.101517
Liu, F., Feng, L., Vo, A., Li, J.: Unstructured-mesh Galerkin finite element method for the two-dimensional multi-term time-space fractional Bloch–Torrey equations on irregular convex domains. Comput. Math. Appl. 78(5), 1637–1650 (2019)
Jin, Q., Li, L., Lang, G.: p-Regularity and p-regular modification in T-convergence spaces. Mathematics, 7(4), 370 (2019). https://doi.org/10.3390/math7040370
Huang, L.: Endomorphisms and cores of quadratic forms graphs in odd characteristic. Finite Fields Appl. 55, 284–304 (2019)
Huang, L., Lv, B., Wang, K.: Erdos–Ko–Rado theorem, Grassmann graphs and \(p^{s}\)-Kneser graphs for vector spaces over a residue class ring. J. Comb. Theory, Ser. A 164, 125–158 (2019)
Li, Y., Vuorinen, M., Zhou, Q.: Characterizations of John spaces. Monatshefte Math. 188(3), 547–559 (2019)
Huang, L., Lv, B., Wang, K.: The endomorphisms of Grassmann graphs. Ars Math. Contemp. 10(2), 383–392 (2016)
Zhang, Y.: Right triangle and parallelogram pairs with a common area and a common perimeter. J. Number Theory 164, 179–190 (2016)
Zhang, Y.: Some observations on the Diophantine equation \(f(x)f(y) = f(z)^{2}\). Colloq. Math. 142(2), 275–283 (2016)
Gong, X., Wen, F., He, Z., Yang, J., Yang, X.: Extreme return, extreme volatility and investor sentiment. Filomat 30(15), 3949–3961 (2016)
Jiang, Y., Huang, B.: A note on the value distribution of \(f^{1} (f^{(}k))^{n}\). Hiroshima Math. J. 46(2), 135–147 (2016)
Acknowledgements
We would like to thank the anonymous referees and the editor for considering our original paper.
Availability of data and materials
Data sharing not applicable to this article as no datasets were generated or analyzed during the current study.
Funding
This work was supported by the National Natural Science Foundation of China (Nos. 11971076, 11861037) and the Natural Scientific Research Fund of Hunan Provincial of China (Grant No. 2016JJ6104).
Author information
Authors and Affiliations
Contributions
The two authors contributed equally to this work. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare that they have no competing interests.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Zhang, H., Qian, C. Convergence analysis on inertial proportional delayed neural networks. Adv Differ Equ 2020, 277 (2020). https://doi.org/10.1186/s13662-020-02737-3
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13662-020-02737-3