
Abstract
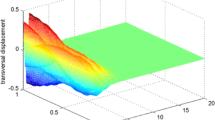
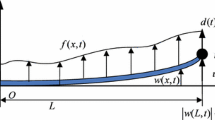
This paper focuses on the boundary control of a Timoshenko beam with a tip mass in space. Compared with an Euler–Bernoulli beam model, the coupling of the Timoshenko beam’s transverse vibration and its cross-sectional rotation makes it difficult to develop the controller. The Timoshenko beam is essentially a distributed parameter system, the motion of which can be described using partial differential equations. A prescribed performance function is introduced to the boundary control strategy to guarantee the transient and steady tracking errors. By applying the proposed controller, the outputs are ultimately restricted within a small residual set, which is arbitrarily predefined, and the minimum convergence rate can be ensured. The stability of the boundary control is analyzed using the LaSalle’s invariance principle and the theoretical solutions of the Timoshenko beam model. Finally, the performance of the presented boundary controller is verified by numerical case studies.


















Similar content being viewed by others

References
Meng, D.S., Wang, X.Q., Xu, W.F., Liang, B.: Space robots with flexible appendages: dynamic modeling, coupling measurement, and vibration suppression. J. Sound Vib. 396, 30–50 (2017)
Chen, T., Shan, J.J., Wen, H.: Distributed adaptive attitude control for networked underactuated flexible spacecraft. IEEE Trans. Aerosp. Electron. Syst. (2018)
Verlinden, O., Huynh, H.N., Kouroussis, G., Rivière-Lorphèvre, E.: Modelling of flexible bodies with minimal coordinates by means of the corotational formulation. Multibody Syst. Dyn. 42, 495–514 (2018)
Chen, T., Wen, H.: Autonomous assembly with collision avoidance of a fleet of flexible spacecraft based on disturbance observer. Acta Astronaut. 147, 86–96 (2018)
Korayem, M.H., Dehkordi, S.F.: Derivation of dynamic equation of viscoelastic manipulator with revolute-prismatic joint using recursive Gibbs-Appell formulation. Nonlinear Dyn. 89, 2041–2064 (2017)
Yang, X.X., Ge, S.S., He, W.: Dynamic modelling and adaptive robust tracking control of a space robot with two-link flexible manipulators under unknown disturbances. Int. J. Control 91, 969–988 (2018)
Ouyang, Y.C., He, W., Li, X.J.: Reinforcement learning control of a single-link flexible robotic manipulator. IET Control Theory Appl. 11, 1426–1433 (2017)
Chen, T., Shan, J.J., Ramkumar, G.: Distributed adaptive control for multiple under-actuated Lagrangian systems under fixed or switching topology. Nonlinear Dyn. 93, 1705–1718 (2018)
Ma, J.T., Jin, D.P., Wei, Z.T., Chen, T., Wen, H.: Boundary control of a flexible manipulator based on a high order disturbance observer with input saturation. Shock Vib. (2018). https://doi.org/10.1155/2018/2086424
Ma, J.T., Wen, H., Jin, D.P.: PDE model-based boundary control of a spacecraft with double flexible appendages under prescribed performance. Adv. Space Res. 65, 586–597 (2020)
Auriol, J., Morris, K.A., Di Meglio, F.: Late-lumping backstepping control of partial differential equations. Automatica 100, 247–259 (2019)
He, W., Ge, S.S.: Vibration control of a flexible beam with output constraint. IEEE Trans. Ind. Electron. 62, 5023–5030 (2015)
Liu, Z.J., Liu, J.K., He, W.: Boundary control of an Euler–Bernoulli beam with input and output restrictions. Nonlinear Dyn. 92, 531–541 (2018)
Jiang, T.T., Liu, J.K., He, W.: Adaptive boundary control for a flexible manipulator with state constraints using a Barrier Lyapunov Function. J. Dyn. Syst. Meas. Control. 140 (2018)
He, W., Mu, X.X., Chen, Y.N., He, X.Y., Yu, Y.: Modeling and vibration control of the flapping-wing robotic aircraft with output constraint. J. Sound Vib. 423, 472–483 (2018)
Cao, F.F., Liu, J.K.: Vibration control for a rigid-flexible manipulator with full state constraints via Barrier Lyapunov Function. J. Sound Vib. 406, 237–252 (2017)
Zhang, S., He, X.Y., Yang, C.: Vibration control of a flexible marine riser with joint angle constraint. Nonlinear Dyn. 87, 617–632 (2017)
Bechlioulis, C.P., Rovithakis, G.A.: Adaptive control with guaranteed transient and steady state tracking error bounds for strict feedback systems. Automatica 45, 532–538 (2009)
Bechlioulis, C.P., Rovithakis, G.A.: Robust adaptive control of feedback linearizable MIMO nonlinear systems with prescribed performance. IEEE Trans. Autom. Control 53, 2090–2099 (2008)
Karayiannidis, Y., Doulgeri, Z.: Model-free robot joint position regulation and tracking with prescribed performance guarantees. Robot. Autonom. Syst. 60, 214–226 (2012)
Li, S., Xiang, Z.: Adaptive prescribed performance control for switched nonlinear systems with input saturation. Int. J. Syst. Sci. 49, 113–123 (2018)
Wei, C.S., Luo, J.J., Dai, H.H., Bian, Z.L., Yuan, J.P.: Learning-based adaptive prescribed performance control of postcapture space robot-target combination without inertia identifications. Acta Astronaut. 146, 228–242 (2018)
Wang, C.C., Yang, G.H.: Observer-based adaptive prescribed performance tracking control for nonlinear systems with unknown control direction and input saturation. Neurocomputing 284, 17–26 (2018)
Liu, Z.J., Liu, J.K.: Boundary control of a flexible robotic manipulator with output constraints. Asian J. Control 19, 332–345 (2017)
Liu, Z.J., Liu, J.K.: Adaptive iterative learning boundary control of a flexible manipulator with guaranteed transient performance. Asian J. Control 19, 1–12 (2017)
Cao, F.F., Liu, J.K.: Boundary control for a constrained two-link rigid-flexible manipulator with prescribed performance. Int. J. Control 91, 1091–1103 (2018)
Siuka, A., Schöberl, M., Schlacher, K.: Port-Hamiltonian modelling and energy-based control of the Timoshenko beam. Acta Mech. 222, 69–89 (2011)
Pirrotta, A., Cutrona, S., Di Lorenzo, S.: Fractional visco-elastic Timoshenko beam from elastic Euler–Bernoulli beam. Acta Mech. 226, 179–189 (2015)
Aldraihem, O.J., Wetherhold, R.C., Singh, T.: Distributed control of laminated beams: Timoshenko theory vs. Euler–Bernoulli theory. J. Intell. Mater. Syst. Struct. 8, 149–157 (1997)
Queiroz, M.S.D., Dawson, D.M., Nagarkatti, S.P., Zhang, F.M.: Lyapunov-based control of mechanical systems. Appl. Mech. Rev. 54, B81 (2001)
Liberzon, D.: Calculus of Variations and Optimal Control Theory: A Concise Introduction. Princeton University Press, Princeton (2012)
LaSalle, J.P.: The Stability of Dynamical Systems. Siam, New York (1976)
Cao, F.F., Liu, J.K.: Partial differential equation modeling and vibration control for a nonlinear 3D rigid-flexible manipulator system with actuator faults. Int. J. Robust Nonlinear Control 29, 3793–3807 (2019)
Chen, T., Wen, H., Wei, Z.T.: Distributed attitude tracking for multiple flexible spacecraft described by partial differential equations. Acta Astronaut. 159, 637–645 (2019)
Cao, F.F., Liu, J.K.: Three-dimensional modeling and input saturation control for a two-link flexible manipulator based on infinite dimensional model. J. Frankl. Inst. 357, 1026–1042 (2020)
Vu, Q.P., Wang, J.M., Xu, G.Q., Yung, S.P.: Spectral analysis and system of fundamental solutions for Timoshenko beams. Appl. Math. Lett. 18, 127–134 (2005)
Acknowledgements
This work was supported by the National Natural Science Foundation of China (Grant No. 11832005, 11772150 and 11902145) and the National Science Foundation of Jiangsu Province of China (Grant No. BK20190390).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that there is no conflict of interest regarding the publication of this paper.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Ma, J., Wei, Z., Wen, H. et al. Boundary control of a Timoshenko beam with prescribed performance. Acta Mech 231, 3219–3234 (2020). https://doi.org/10.1007/s00707-020-02701-y
Received:
Revised:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00707-020-02701-y