Experimental Investigation on Vortex-Induced Vibration of a Flexible Pipe under Higher Mode in an Oscillatory Flow

Abstract
:1. Introduction
2. Model Test
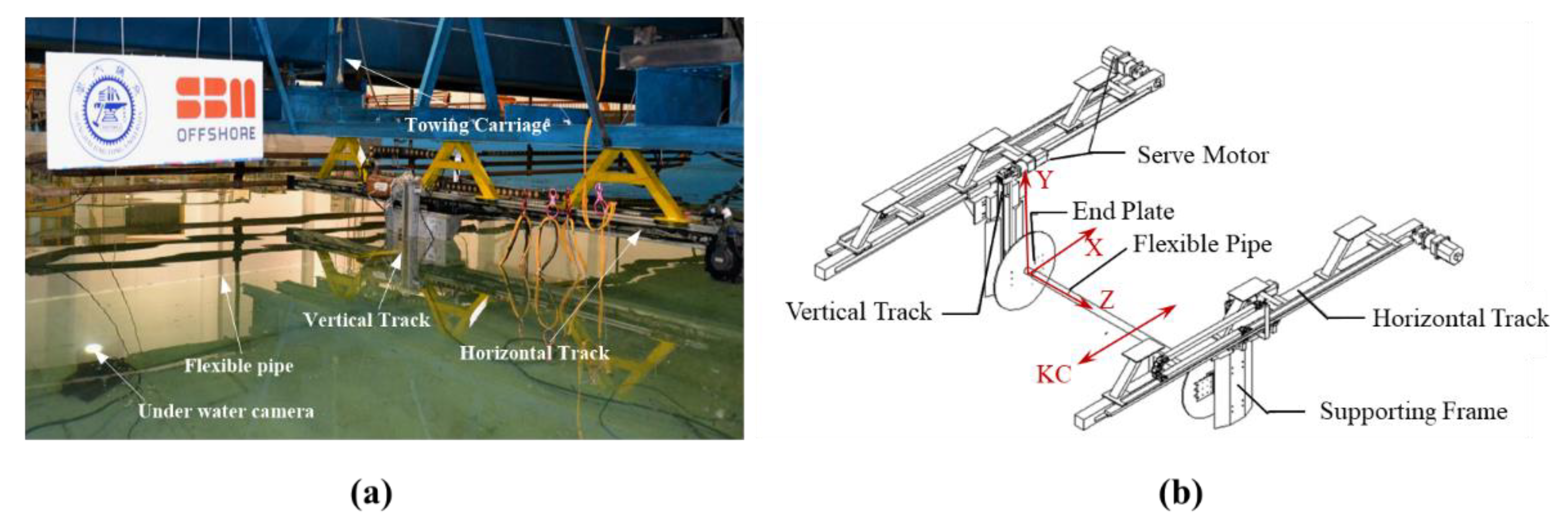
2.1. Experimental Setup
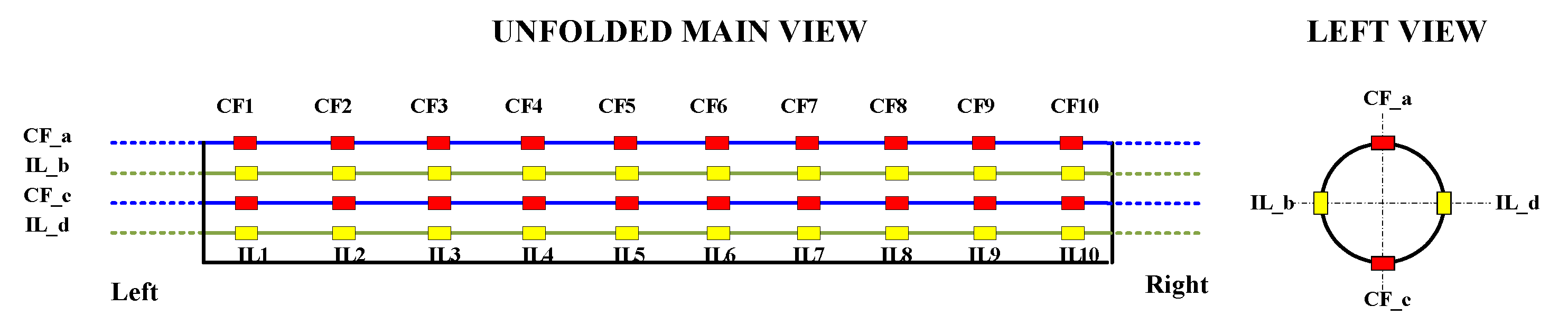
2.2. Test Arrangement
3. Data Analysis Procedures
3.1. Preprocessing
3.2. Displacement Reconstruction
3.3. Time–Frequency Analysis
4. Results and Discussions
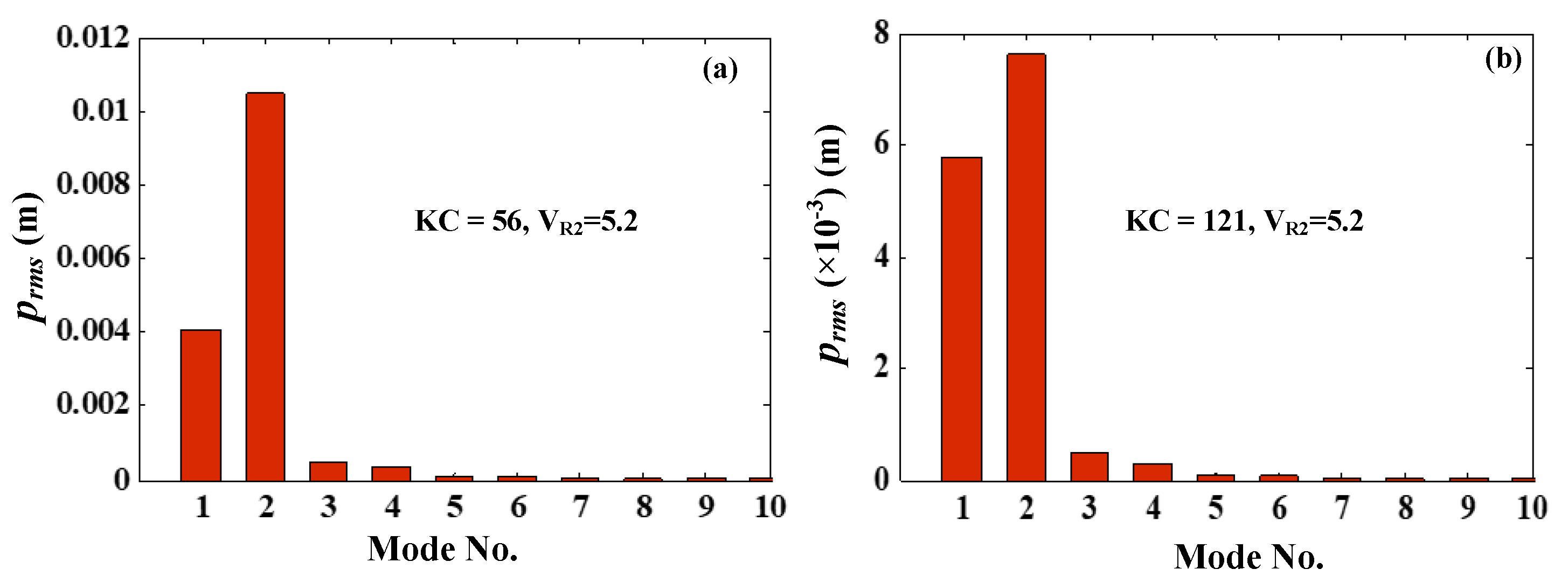
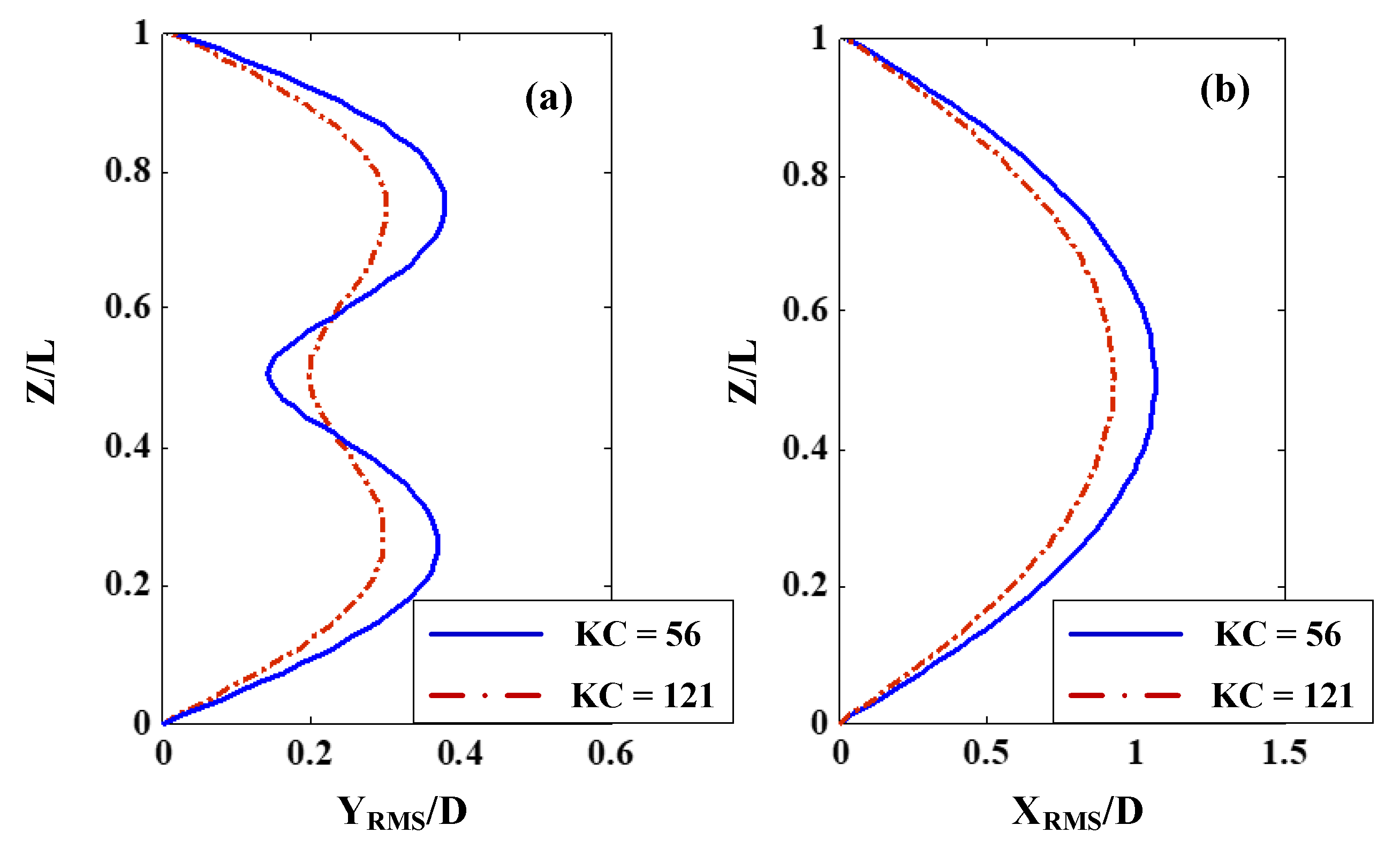
4.1. Spatial and Temporal Distributions of VIV Responses
4.2. Time-Varying Features of VIV Responses
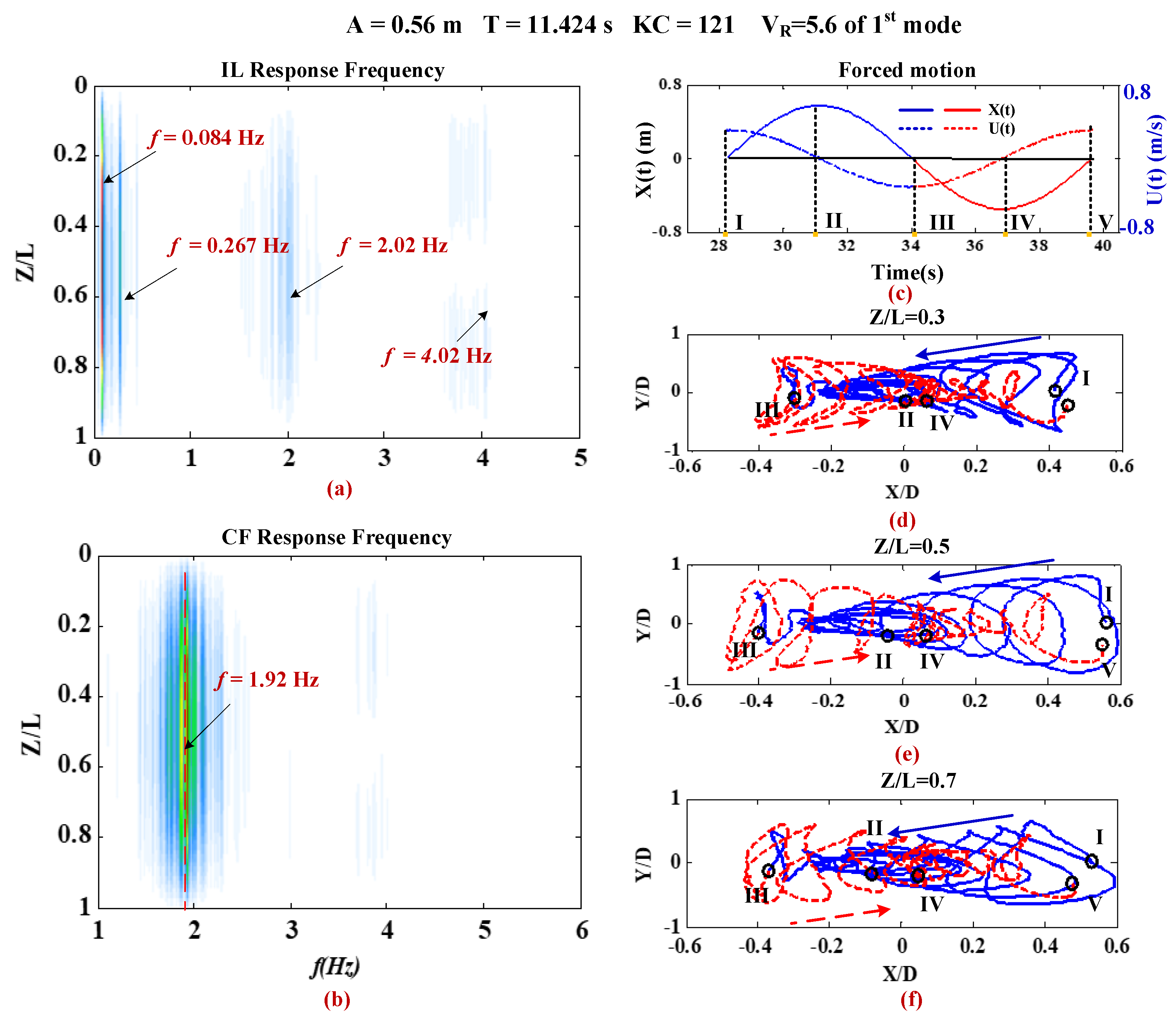
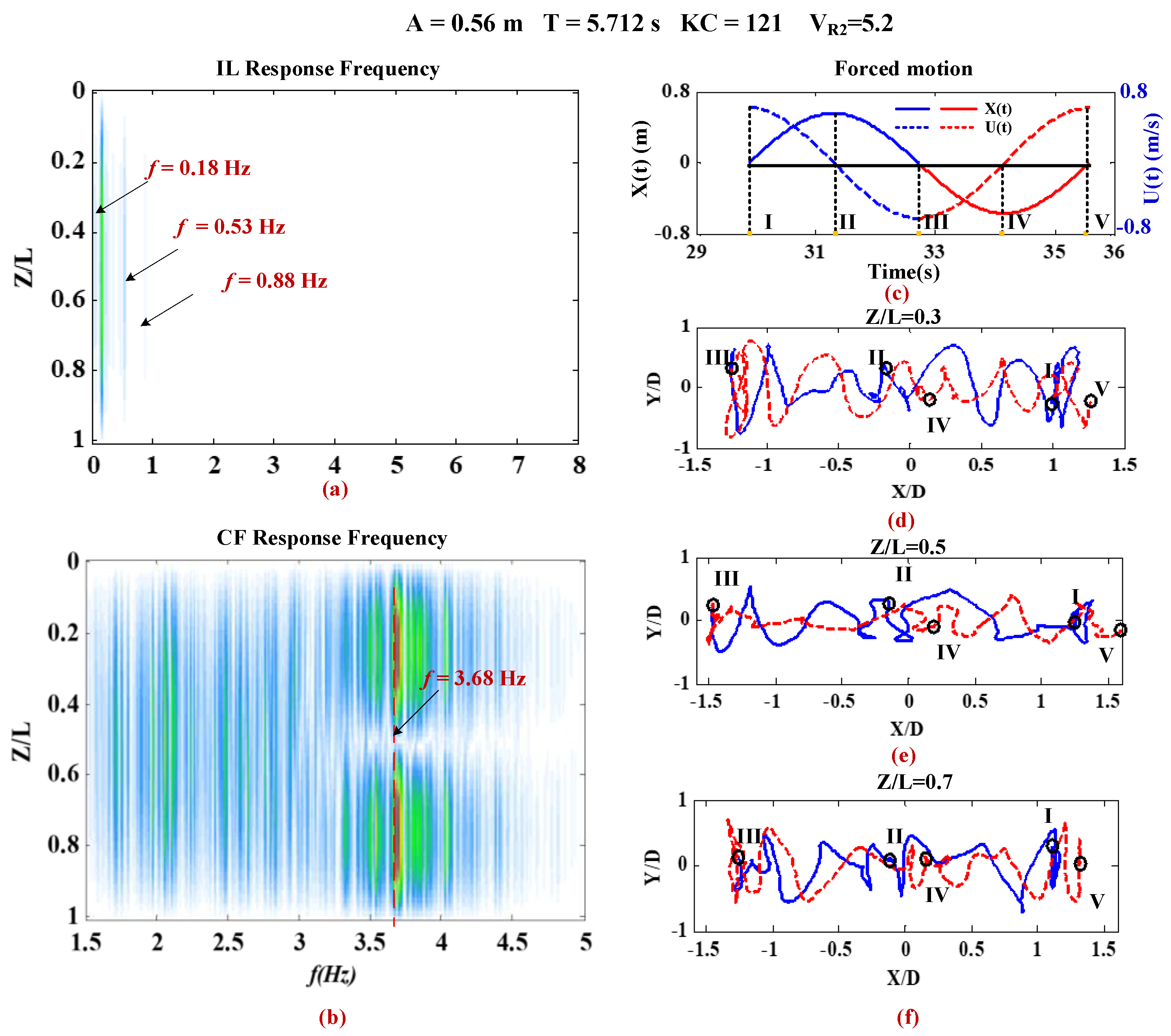
4.3. Response Frequencies and Trajectories
4.4. General Discussions
5. Conclusions
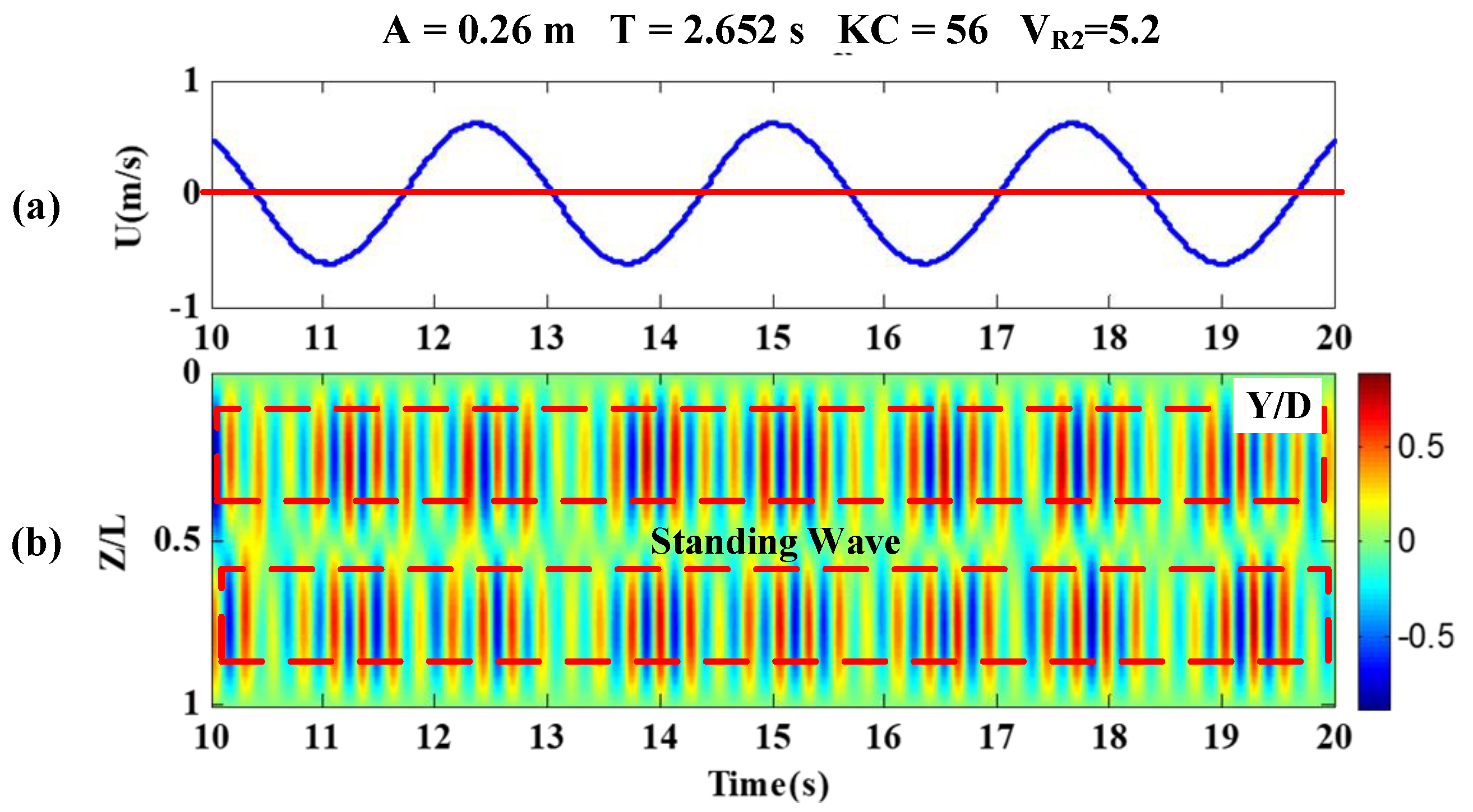
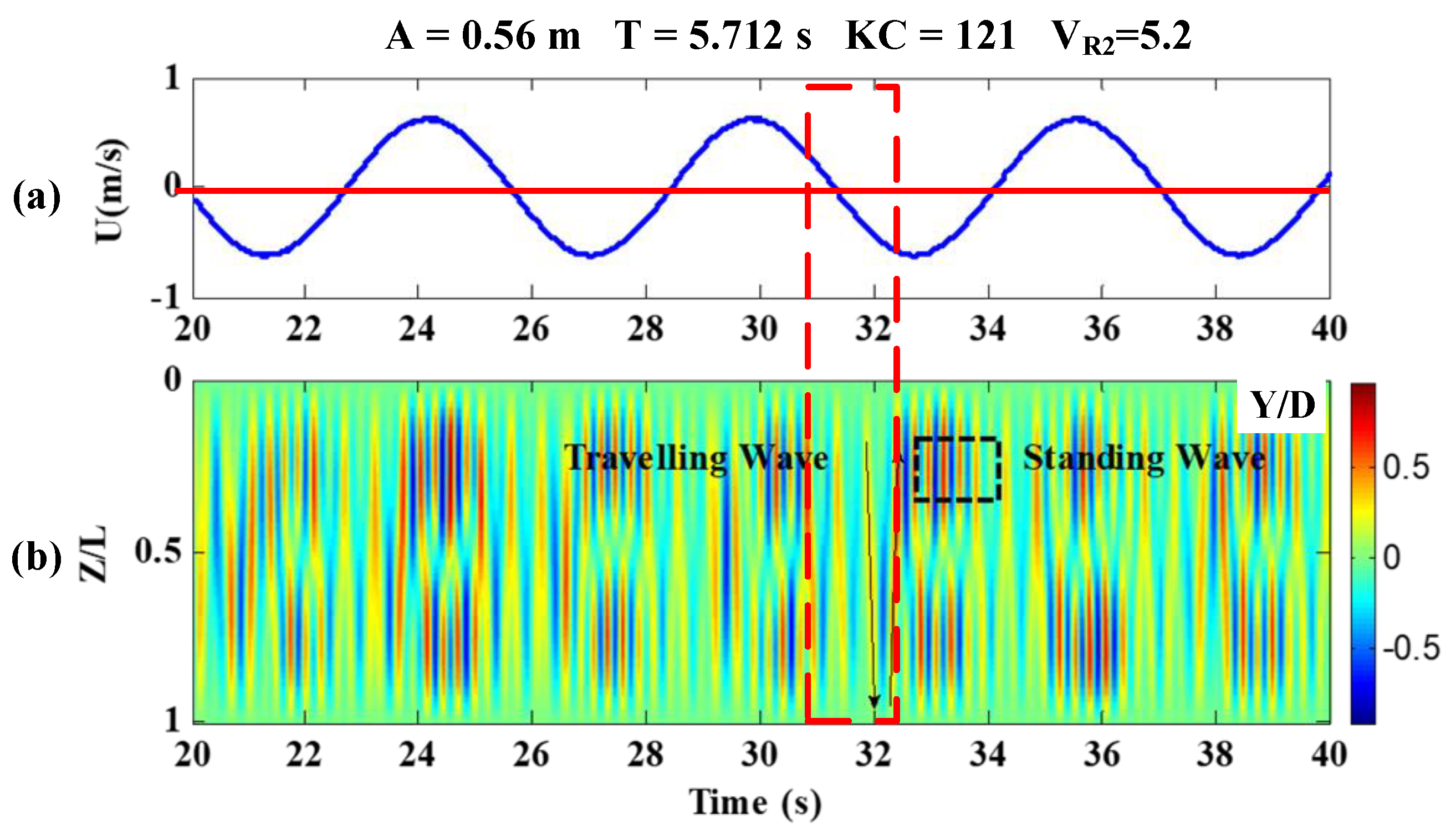
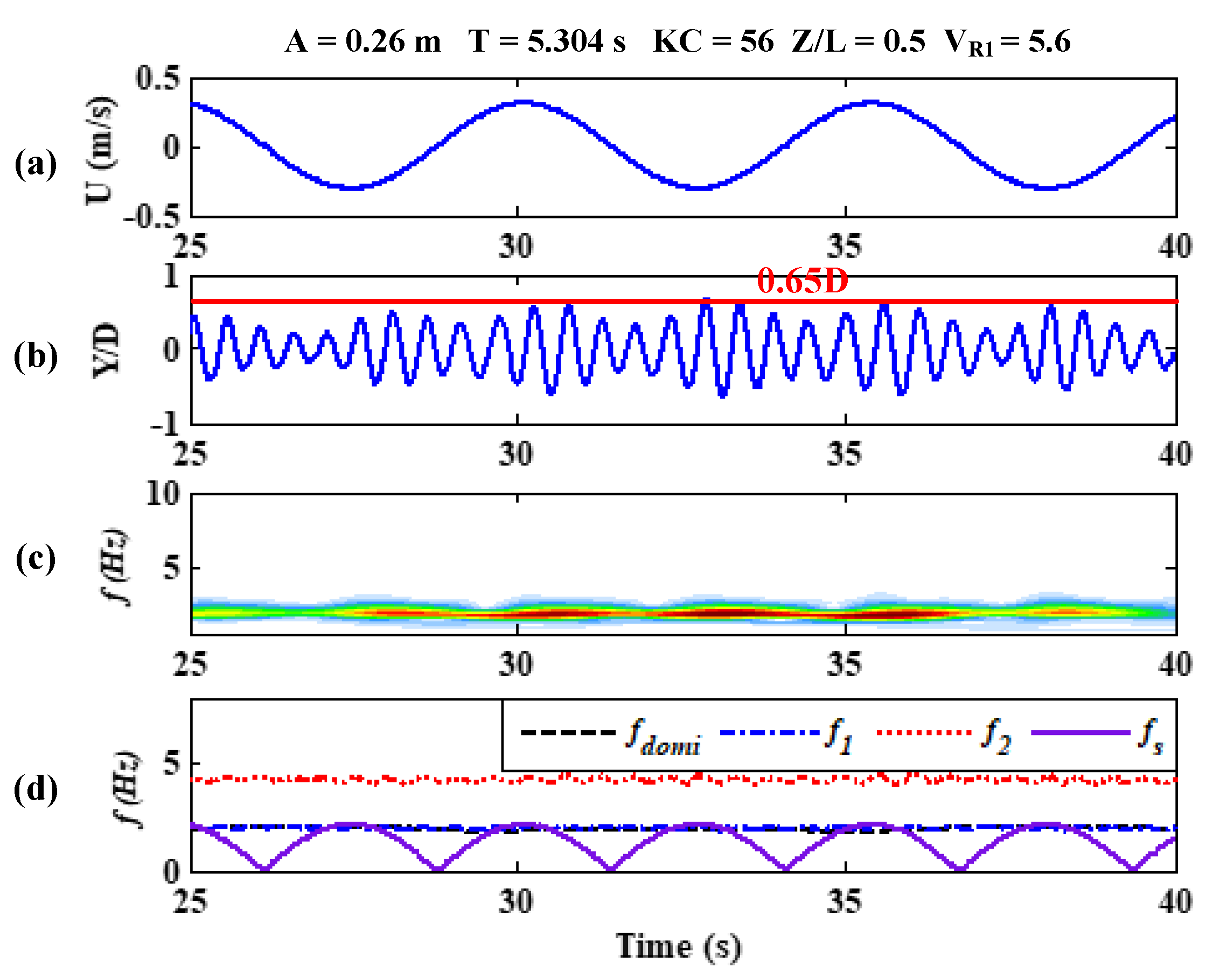
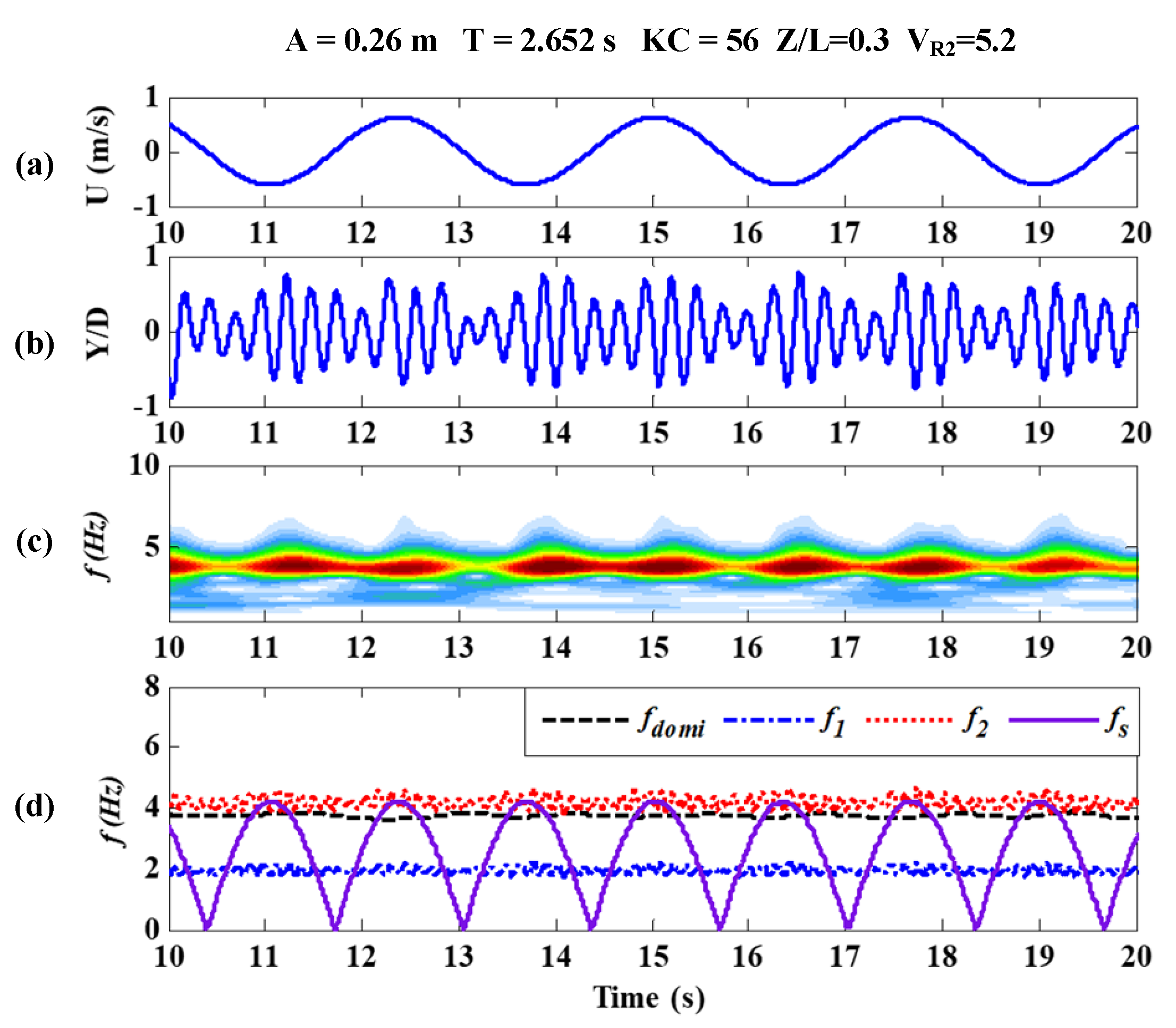
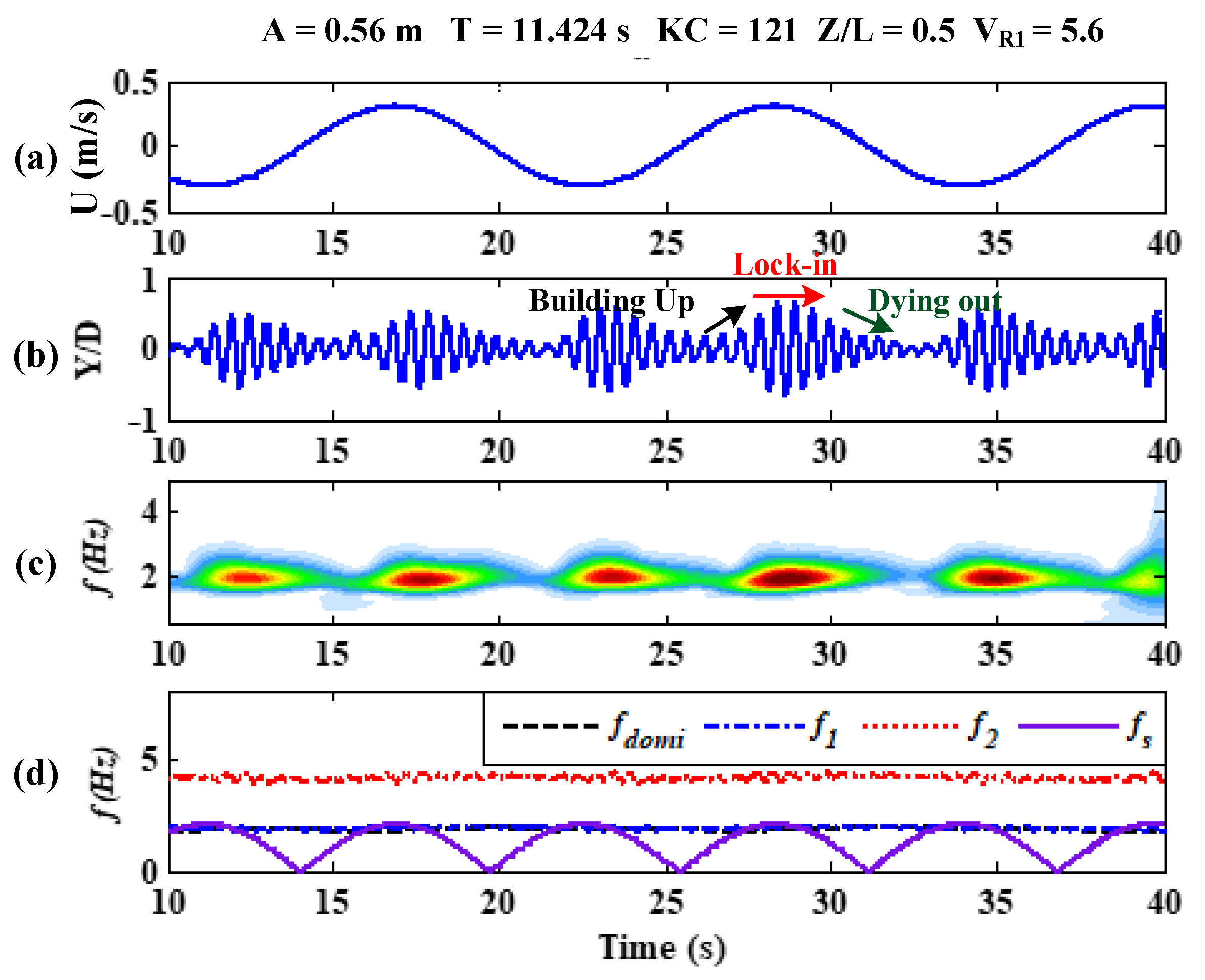
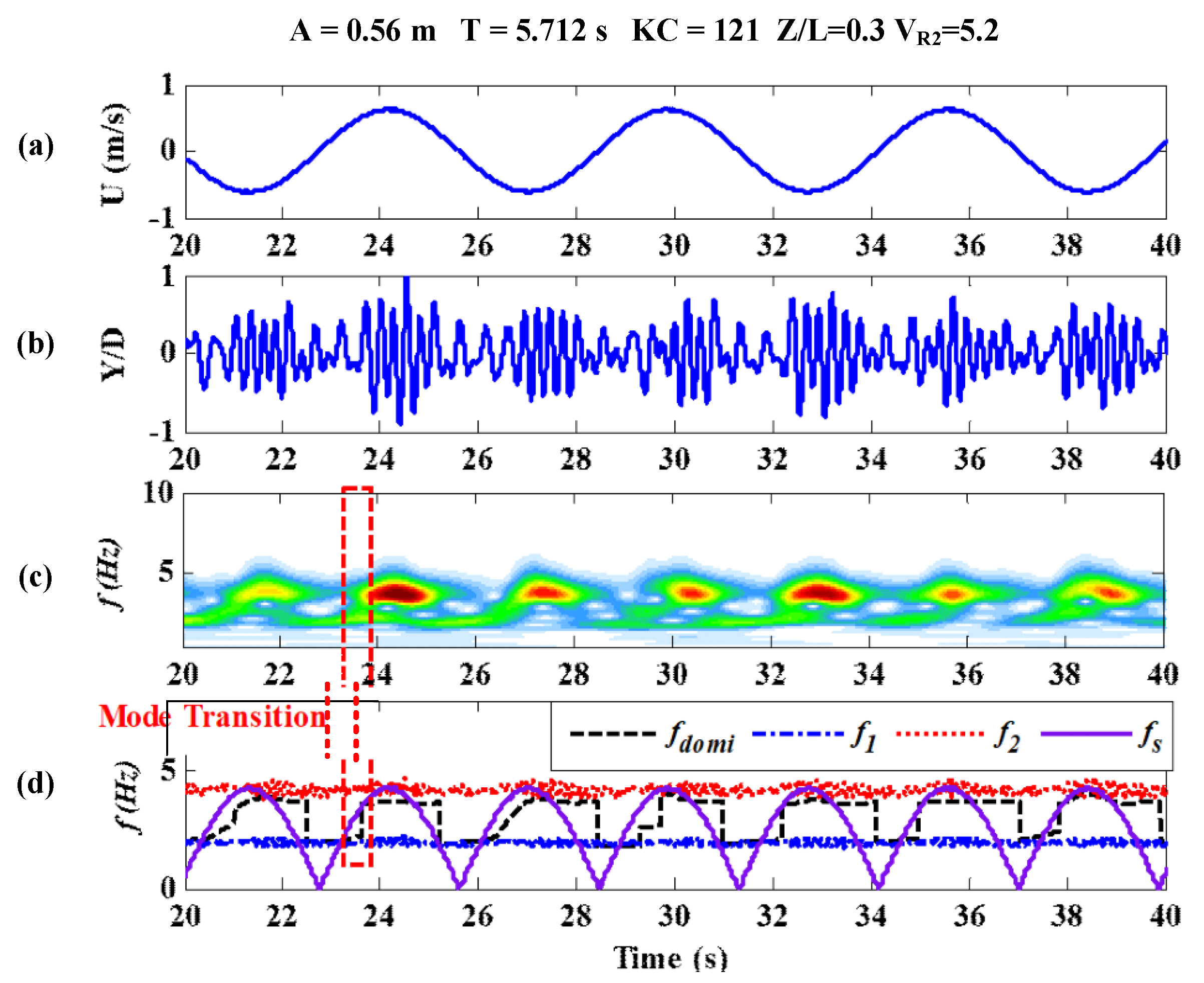
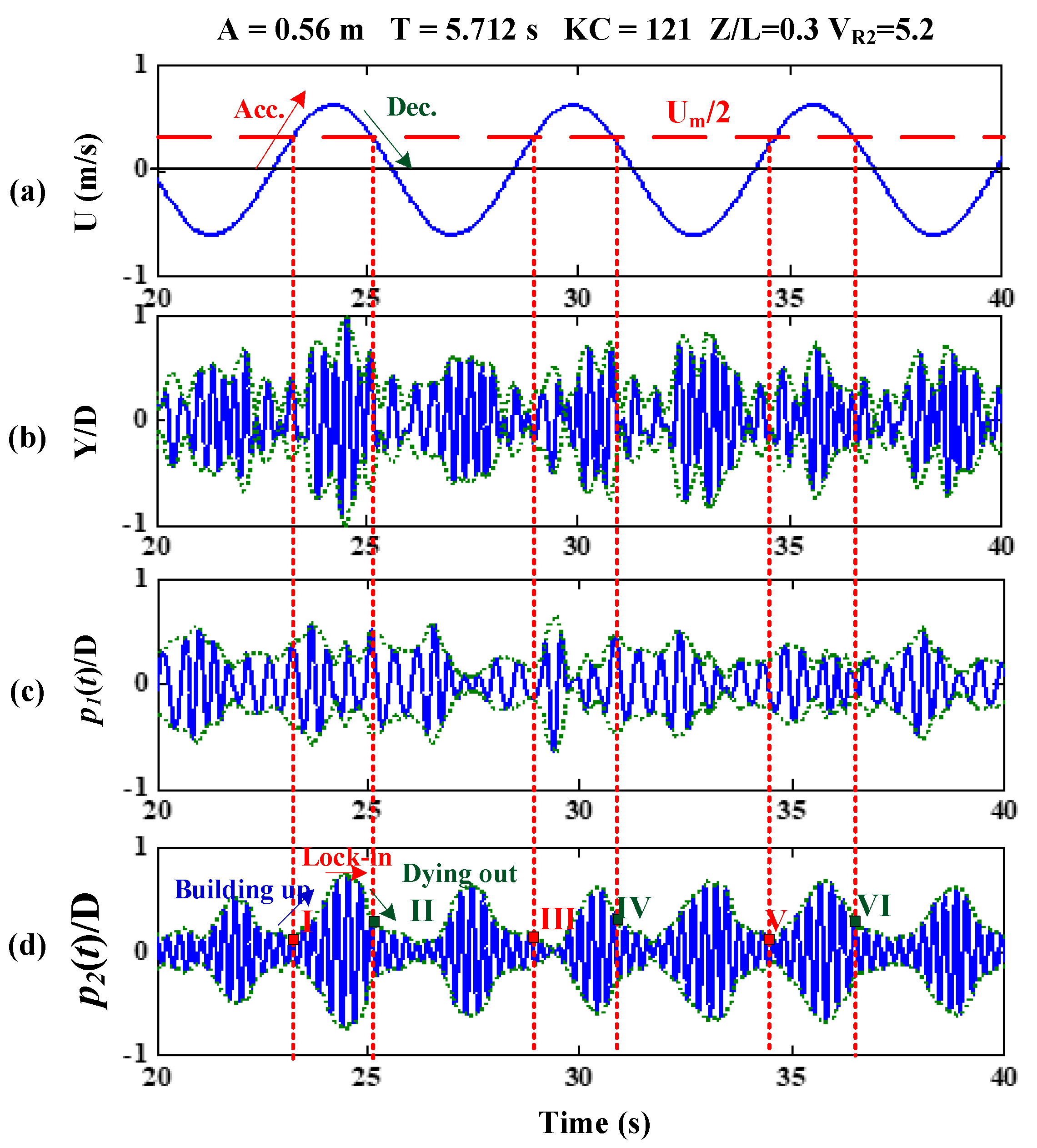
- Under the higher mode, a travelling wave is observed in the mode transition regions for larger KC numbers. An alternate mode lock-in occurs in the case of larger KC numbers, but does not occur for smaller KC ones. A distinctive feature for smaller KC number is that the VIV response of the flexible pipe always locks in the dominant mode.
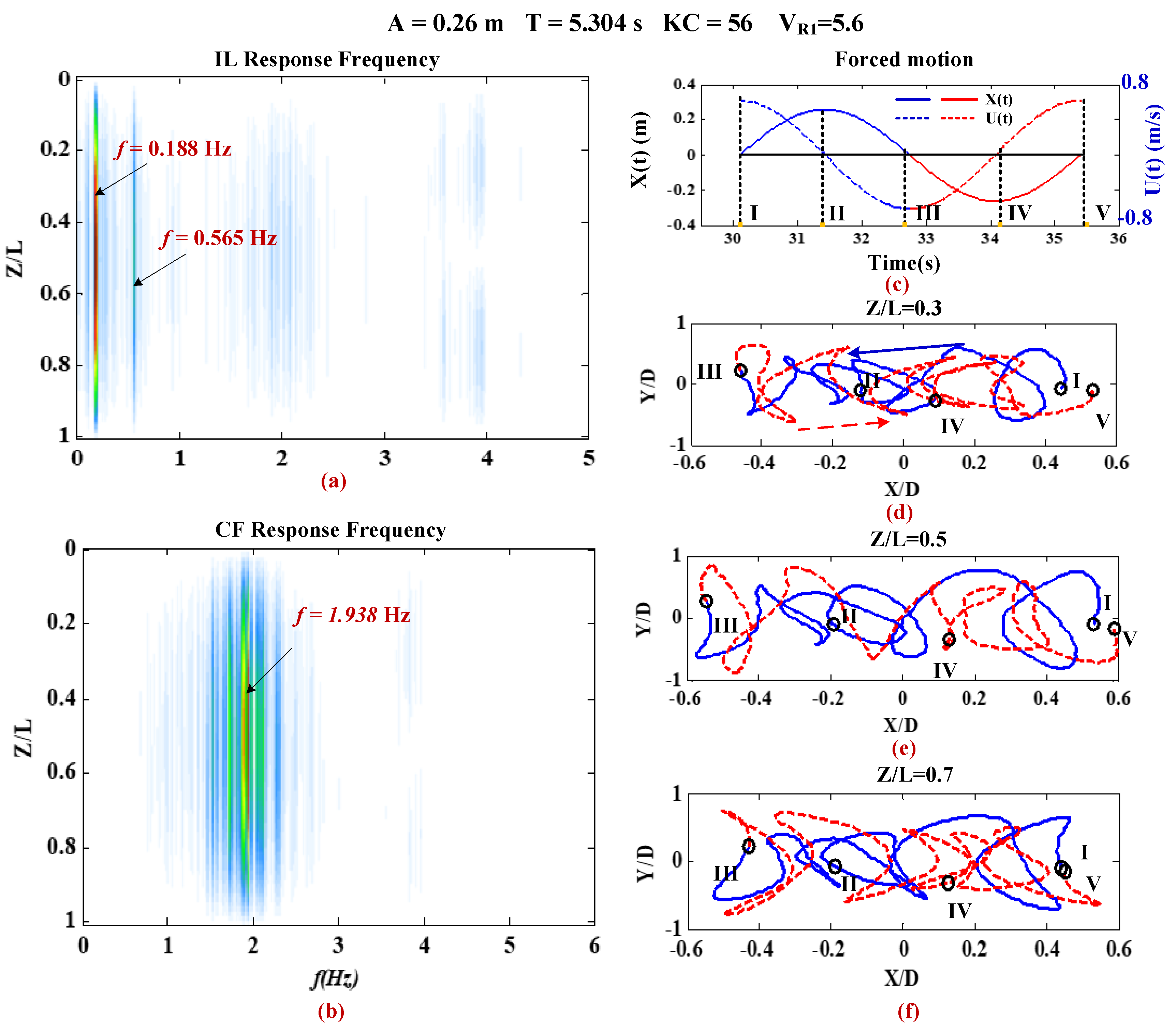
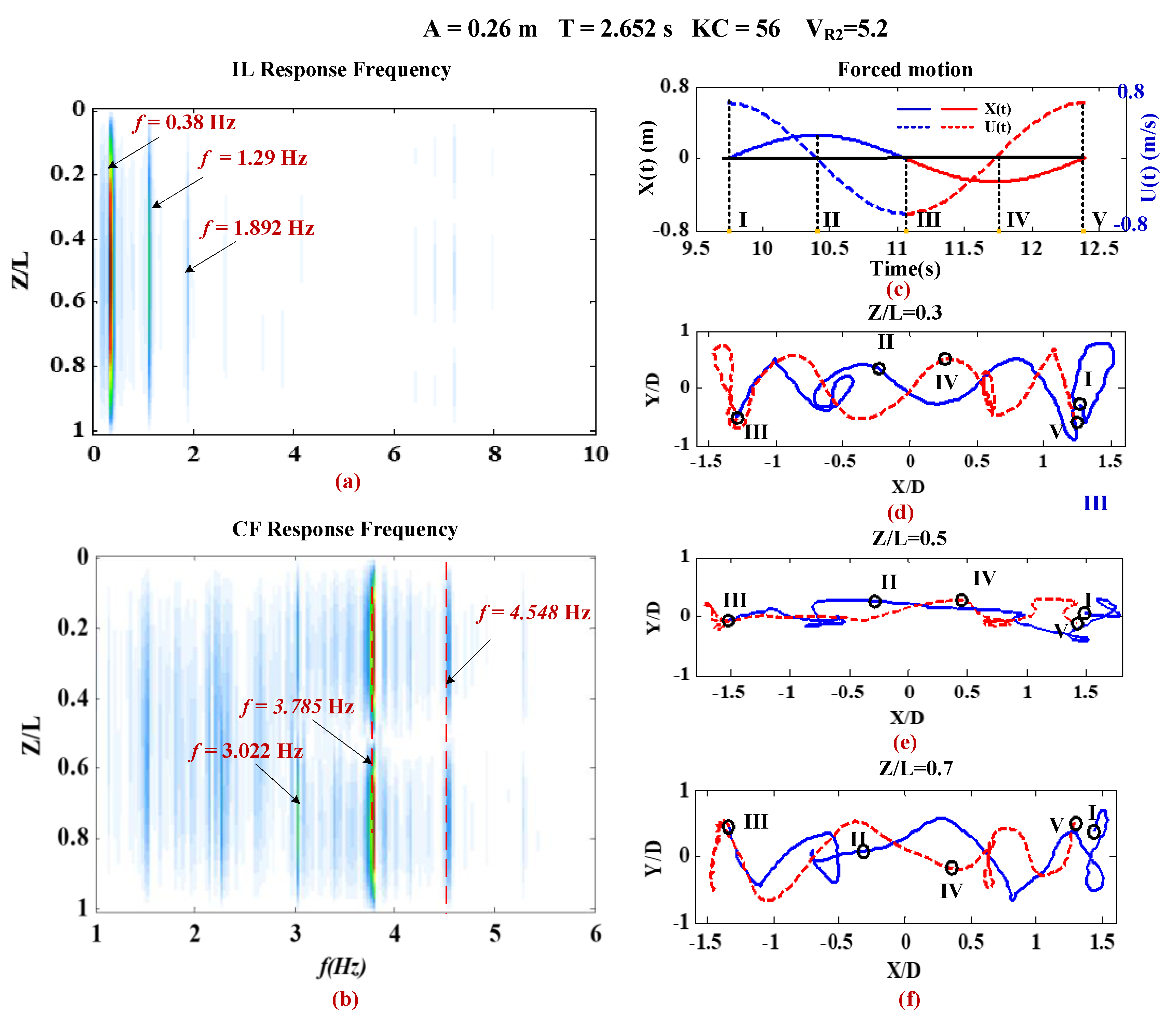
- The features of response motion trajectory under higher modes are different from those under only the first mode excited, especially for larger KC numbers. The walking “8” and “o” shapes of the motion trajectory are observed under only the first mode excited and disappear under the higher mode. The discrepancies of trajectory along the flexible pipe and in different time phases indicate that the hydrodynamic coefficient may exhibit spatial and temporal features.
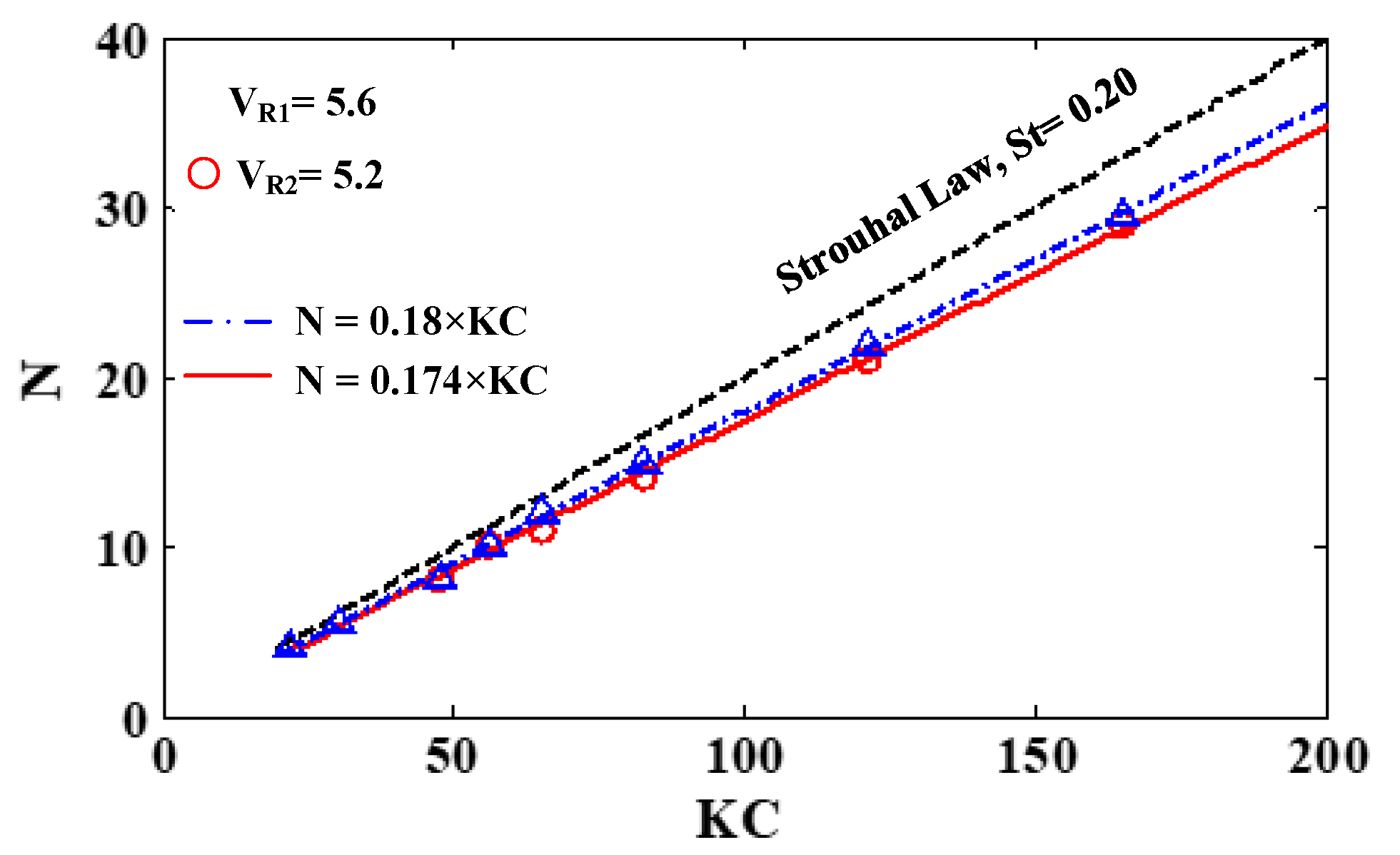
- The dominant frequency of the VIV is always kept triple that of the oscillatory flow frequency in the IL direction and maintains the Strouhal law in the CF direction. Under a VR of approximately 5.5, the St number is equal to 0.18 and is not affected by the excited mode number.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Blevins, R.D.; Saunders, H. Flow-Induced Vibration; Elsevier: Amsterdam, The Netherlands, 1977. [Google Scholar]
- Schewe, G. On the force fluctuations acting on a circular cylinder in crossflow from subcritical up to transcritical Reynolds numbers. J. Fluid Mech. 1983, 133, 265–285. [Google Scholar] [CrossRef]
- Williamson, C.H.K. Defining a universal and continuous Strouhal–Reynolds number relationship for the laminar vortex shedding of a circular cylinder. Phys. Fluids 1988, 31, 2742. [Google Scholar] [CrossRef]
- Hallam, M.G. Dynamics of Marine Structures: Methods of Calculating the Dynanic Response of Fixed Structures Sub; Ciria underwater engineering group: London, UK, 1977. [Google Scholar]
- Achenbach, E.; Heinecke, E. On vortex shedding from smooth and rough cylinders in the range of reynolds number multiplied by 103 to multiplied by 106. J. Fluid Mech. 1981, 109, 239–251. [Google Scholar] [CrossRef]
- Williamson, C.H.K. Sinusoidal flow relative to circular cylinders. J. Fluid Mech. 2006, 155, 141–174. [Google Scholar] [CrossRef]
- Williamson, C.H.K.; Govardhan, R. Vortex-induced vibrations. Annu. Rev. Fluid Mech. 2004, 36, 413–455. [Google Scholar] [CrossRef] [Green Version]
- Williamson, C.H.K.; Govardhan, R. A brief review of recent results in vortex-induced vibrations. J. Wind. Eng. Ind. Aerodyn. 2008, 96, 713–735. [Google Scholar] [CrossRef]
- Govardhan, R.; Williamson, C.H.K. Modes of vortex formation and frequency response of a freely vibrating cylinder. J. Fluid Mech. 2000, 420, 85–130. [Google Scholar] [CrossRef]
- Sarpkaya, T. A critical review of the intrinsic nature of vortex-induced vibrations. J. Fluids Struct. 2004, 19, 389–447. [Google Scholar] [CrossRef]
- Bearman, P.W. Vortex shedding from oscillating bluff bodies. Annu. Rev. Fluid Mech. 1984, 16, 195–222. [Google Scholar] [CrossRef]
- Feng, C.C. The Measurement of Vortex Induced Effects in Flow past Stationary and Oscillating Circular and D-Section Cylinder. Master’s Thesis, University of Britich Columbia, Vanccuver, BC, Canada, 1963. [Google Scholar]
- Griffin, O.M.; Ramberg, S.E. Some recent studies of vortex shedding with application to marine tubulars and risers. J. Energy Resour. Technol. 1982, 104, 2–13. [Google Scholar] [CrossRef]
- Parkinson, G. Phenomena and modelling of flow-induced vibrations of bluff bodies. Prog. Aerosp. Sci. 1989, 26, 169–224. [Google Scholar] [CrossRef]
- Lie, H.; Kaasen, K.E. Modal analysis of measurements from a large-scale VIV model test of a riser in linearly sheared flow. J. Fluids Struct. 2006, 22, 557–575. [Google Scholar] [CrossRef]
- Fu, S.; Ren, T.; Li, R.; Wang, X. Experimental Investigation on VIV of the Flexible Model under Full Scale Re Number. In Proceedings of the ASME 2011 30th International Conference on Ocean, Offshore and Arctic Engineering, Rotterdam, The Netherlands, 19–24 June 2011; pp. 43–50. [Google Scholar]
- Ren, H.; Xu, Y.; Zhang, M.; Fu, S.; Meng, Y.; Huang, C. Distribution of drag coefficients along a flexible pipe with helical strakes in uniform flow. Ocean Eng. 2019, 184, 216–226. [Google Scholar] [CrossRef]
- Vandiver, J.K. Drag coefficients of long flexible cylinders. In Proceedings of the 15th Annual Offshore Technology Conference, Houston, TX, USA, 1–4 May 1985. [Google Scholar]
- Chaplin, J.R.; Bearman, P.W.; Huarte, F.J.H.; Pattenden, R.J. Laboratory measurements of vortex-induced vibrations of a vertical tension riser in a stepped current. J. Fluids Struct. 2005, 21, 3–24. [Google Scholar] [CrossRef]
- Song, L.; Fu, S.; Dai, S.; Zhang, M.; Chen, Y. Distribution of drag force coefficient along a flexible riser undergoing VIV in sheared flow. Ocean Eng. 2016, 126, 1–11. [Google Scholar] [CrossRef]
- Song, L.; Fu, S.; Li, M.; Gao, Y.; Ma, L. Tension and drag forces of flexible risers undergoing vortex-induced vibration. China Ocean Eng. 2017, 31, 1–10. [Google Scholar] [CrossRef]
- Frank, W.R.; Tognarelli, M.A.; Slocum, S.T.; Campbell, R.B.; Balasubramanian, S. Flow-induced vibration of a long, flexible, straked cylinder in uniform and linearly sheared currents. In Offshore Technology Conference; Offshore Technology Conference: Houston, TX, USA, 2004; p. 8. [Google Scholar]
- Trim, A.D.; Braaten, H.; Lie, H.; Tognarelli, M.A. Experimental investigation of vortex-induced vibration of long marine risers. J. Fluids Struct. 2005, 21, 335–361. [Google Scholar] [CrossRef]
- Vandiver, J.K.; Li, L. SHEAR7 V4.4 Program Theoretical Manual; Massachusetts Institute of Technology: Cambridge, MA, USA, 2005. [Google Scholar]
- Triantafyllou, M.; Triantafyllou, G.; Tein, Y.D.; Ambrose, B.D. Pragmatic Riser VIV Analysis. In Proceedings of the Offshore Technology Conference (OTC), Houston, TX, USA, 3–6 May 1999. [Google Scholar]
- SINTEF Ocean. VIVANA 4.12.2 Theory Manual; Marintek: Trondheim, Norway, 2018. [Google Scholar]
- Wang, J.; Fu, S.; Baarholm, R.; Jie, W.; Larsen, C.M. Out-of-plane vortex-induced vibration of a steel catenary riser caused by vessel motions. Ocean Eng. 2015, 109, 389–400. [Google Scholar] [CrossRef]
- Wang, J.; Fu, S.; Larsen, C.M.; Baarholm, R.; Wu, J.; Lie, H. Dominant parameters for vortex-induced vibration of a steel catenary riser under vessel motion. Ocean Eng. 2017, 136, 260–271. [Google Scholar] [CrossRef] [Green Version]
- Pesce, C.P.; Franzini, G.R.; Fujarra, A.L.C.; Gonçalves, R.T.; Salles, R.; Mendes, P. Further experimental investigations on vortex self-induced vibrations (vsiv) with a small-scale catenary riser model. In Proceedings of the ASME 2017 36th International Conference on Ocean, Offshore and Arctic Engineering, Rondheim, Norway, 25–30 June 2017. [Google Scholar]
- Wang, J.; Fu, S.; Baarholm, R.; Jie, W.; Larsen, C.M. Fatigue damage of a steel catenary riser from vortex-induced vibration caused by vessel motions. Mar. Struct. 2014, 39, 131–156. [Google Scholar] [CrossRef]
- Le Cunff, C.; Biolley, F.; Damy, G. Experimental and numerical study of heave-induced lateral motion (HILM). In Proceedings of the ASME 2005 24th International Conference on Offshore Mechanics and Arctic Engineering, Halkidiki, Greece, 12–17 June 2005; pp. 757–765. [Google Scholar]
- Rateiro Pereira, F.; Gonçalves, R.T.; Pesce, C.P.; Fujarra, A.L.C.; Franzini, G.R.; Mendes, P. A model scale experimental investigation on vortex-self induced vibrations (vsiv) of catenary risers. In Proceedings of the ASME 2013 32nd International Conference on Ocean, Offshore and Arctic Engineering. Volume 7: CFD and VIV, Nantes, France, 9–14 June 2013. V007T08A029. [Google Scholar]
- Wang, J.; Fu, S.; Wang, J.; Li, H.; Ong, M.C. Experimental investigation on vortex-induced vibration of a free-hanging riser under vessel motion and uniform current. J. Offshore Mech. Arct. Eng. 2017, 139. [Google Scholar] [CrossRef]
- Wang, J.; Xiang, S.; Fu, S.; Cao, P.; Yang, J.; He, J. Experimental investigation on the dynamic responses of a free-hanging water intake riser under vessel motion. Mar. Struct. 2016, 50, 1–19. [Google Scholar] [CrossRef] [Green Version]
- Fu, S.; Wang, J.; Baarholm, R.; Wu, J.; Larsen, C.M. Features of vortex-induced vibration in oscillatory flow. J. Offshore Mech. Arct. Eng. 2014, 136, 011801. [Google Scholar] [CrossRef]
- Wang, J.; Fu, S.; Baarholm, R.; Wu, J.; Larsen, C.M. Fatigue damage induced by vortex-induced vibrations in oscillatory flow. Mar. Struct. 2015, 40, 73–91. [Google Scholar] [CrossRef]
- Sumer, B.M.; Fredsøe, J. Transverse vibrations of an elastically mounted cylinder exposed to an oscillating flow. J. Offshore Mech. Arct. Eng. 1988, 110, 387–394. [Google Scholar] [CrossRef]
- Ren, H.; Xu, Y.; Cheng, J.; Cao, P.; Zhang, M.; Fu, S.; Zhu, Z. Vortex-induced vibration of flexible pipe fitted with helical strakes in oscillatory flow. Ocean Eng. 2019, 189, 106274. [Google Scholar] [CrossRef]
- Liu, C.; Fu, S.; Zhang, M.; Ren, H.; Xu, Y. Hydrodynamics of a flexible cylinder under modulated vortex-induced vibrations. J. Fluids Struct. 2020, 94, 102913. [Google Scholar] [CrossRef]
- Fu, B.; Zou, L.; Wan, D. Numerical study of vortex-induced vibrations of a flexible cylinder in an oscillatory flow. J. Fluids Struct. 2018, 77, 170–181. [Google Scholar] [CrossRef]
- Song, L.; Fu, S.; Cao, J.; Ma, L.; Wu, J. An investigation into the hydrodynamics of a flexible riser undergoing vortex-induced vibration. J. Fluids Struct. 2016, 63, 325–350. [Google Scholar] [CrossRef]
- Mengmeng, Z.; Shixiao, F.; Leijian, S.; Jie, W.; Halvor, L.; Hanwen, H. Hydrodynamics of flexible pipe with staggered buoyancy elements undergoing vortex-induced vibrations. J. Offshore Mech. Arct. Eng. 2018, 140, 061805. [Google Scholar]
- Liu, C.; Fu, S.; Zhang, M.; Ren, H. Time-varying hydrodynamics of a flexible riser under multi-frequency vortex-induced vibrations. J. Fluids Struct. 2018, 80, 217–244. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Author | Year | Current | Model Type | Experiment Type | Vibration Mode |
|---|---|---|---|---|---|
| Schewe et al., Williamson et al., Hallam et al., Achenbach et al. | 1983, 1988, 1977, 1981 | Uniform flow | Rigid cylinder | Stationary towing | / |
| Williamson et al., Govardhan et al., Sarpkaya, Bearman, Feng, Griffin et al., Parkinson | 2006, 2004, 2008, 2000, 2004, 1984, 1963, 1982, 1989 | Uniform flow | Rigid cylinder | Self-oscillation | / |
| Lie et al., Frank etal., Trim et al. | 2006, 2004, 2005 | Linear shear flow | Flexible pipe | Flexible pipe | Multi-mode |
| Fu et al., Ren et al., Vandiver, Song et al. | 2011, 2019, 1985, 2016, 2017 | Uniform flow | Flexible pipe | Flexible pipe | Multi-mode |
| Chaplin et al. | 2005 | Stepped flow | Flexible pipe | Flexible pipe | Multi-mode |
| Wang et al., Pesce et al., Cunff et al., Pereira et al., | 2015, 2017, 2017, 2005, 2013 | / | Flexible pipe | VMI-VIV | Multi-mode |
| Fu et al., Wang et al. | 2014, 2015 | Oscillatory flow | Flexible pipe | Flexible pipe | 1st |
| Item | Value |
|---|---|
| Model length L (m) | 4 |
| Outer diameter D (mm) | 29 |
| Mass of flexible pipe in the air (kg/m) | 1.529 |
| Mass ratio of flexible pipe (m*) | 2.3 |
| Bending stiffness EI (N·m2) | 46.43 |
| Tensile stiffness EA (N) | 1.528 × 106 |
| Pre-tension FT0 (N) | 500 |
| Damping ratio ζ | 2.53% |
| Calculated first natural frequency f10 in still water (Hz) | 1.90 |
| Calculated second natural frequency f20 in still water (Hz) | 4.08 |
| Case No. | VR | Mode | Am(m) | KC | Remax |
|---|---|---|---|---|---|
| 1–8 | 5.6 | 1st | 0.10–0.76 | 22–165 | 7860 |
| 9–15 | 5.2 | 2nd | 0.22–0.76 | 48–165 | 15,696 |
| VR | KC | Dominant Mode | Forced Motion Frequency (fo) | Dominant Frequency of VIV | Direction |
|---|---|---|---|---|---|
| VR1 = 5.6 | 56 | 1st | 0.188 Hz | 0.565 Hz (3fo) | IL |
| VR1 = 5.6 | 56 | 1st | 0.188 Hz | 1.938 Hz (10fo) | CF |
| VR2 = 5.2 | 56 | 2nd | 0.38 Hz | 1.290 Hz (3fo) | IL |
| VR2 = 5.2 | 56 | 2nd | 0.38 Hz | 3.785 Hz (10fo) | CF |
| VR1 = 5.6 | 121 | 1st | 0.084 Hz | 0.267 Hz (3fo) | IL |
| VR1 = 5.6 | 121 | 1st | 0.084 Hz | 1.920 Hz (22fo) | CF |
| VR2 = 5.2 | 121 | 2nd | 0.18 Hz | 0.530 Hz (3fo) | IL |
| VR2 = 5.2 | 121 | 2nd | 0.18 Hz | 3.680 Hz (21fo) | CF |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ren, H.; Zhang, M.; Cheng, J.; Cao, P.; Xu, Y.; Fu, S.; Liu, C. Experimental Investigation on Vortex-Induced Vibration of a Flexible Pipe under Higher Mode in an Oscillatory Flow. J. Mar. Sci. Eng. 2020, 8, 408. https://doi.org/10.3390/jmse8060408
Ren H, Zhang M, Cheng J, Cao P, Xu Y, Fu S, Liu C. Experimental Investigation on Vortex-Induced Vibration of a Flexible Pipe under Higher Mode in an Oscillatory Flow. Journal of Marine Science and Engineering. 2020; 8(6):408. https://doi.org/10.3390/jmse8060408
Chicago/Turabian StyleRen, Haojie, Mengmeng Zhang, Jingyun Cheng, Peimin Cao, Yuwang Xu, Shixiao Fu, and Chang Liu. 2020. "Experimental Investigation on Vortex-Induced Vibration of a Flexible Pipe under Higher Mode in an Oscillatory Flow" Journal of Marine Science and Engineering 8, no. 6: 408. https://doi.org/10.3390/jmse8060408