
Abstract
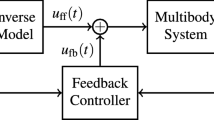
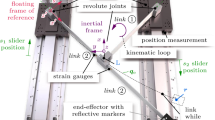
Trajectory tracking problems for underactuated manipulators represent an actual research topic, which is sustained by the interest in a lighter and faster automatic class of mechanical systems, bringing some benefits as lower energy consumption, higher productivity and a more convenient human–machine interaction. This work presents a feedforward design method, which is based on the inverse dynamics of underactuated manipulators. To achieve this aim, an optimal control problem is formulated based on a direct multiple shooting method and the mechanical model is formulated according to the nonlinear finite element approach. Based on the proposed formulation, a bounded solution of the inverse dynamics problem can be achieved. The main contributions of this work are: (1) the development of an alternative formulation for the trajectory tracking problem of underactuated manipulators; (2) a parallel computation method for the inverse dynamics of underactuated manipulators; (3) a comparison/validation with the direct transcription method and the stable inversion method. A planar underactuated manipulator with one passive joint is considered as an illustrative example, but the methodology is general and could be applied to more complex systems, e.g. with flexible bodies, with parallel kinematics and in 3D.













Similar content being viewed by others

References
Arnold, M., Brüls, O.: Convergence of the generalized-\(\alpha \) scheme for constrained mechanical systems. Multibody Syst. Dyn. 18(2), 185–202 (2007)
Bastos, G.J., Seifried, R., Brüls, O.: Inverse dynamics of serial and parallel underactuated multibody systems using a DAE optimal control approach. Multibody Syst. Dyn. 30(3), 359–376 (2013)
Bastos, G.J., Seifried, R., Brüls, O.: Analysis of stable model inversion methods for constrained underactuated mechanical systems. Mech. Mach. Theory 111, 99–117 (2017)
Bayo, E., Ledesma, R.: Augmented lagrangian and mass-orthogonal projection methods for constrained multibody dynamics. Nonlinear Dyn. 9, 113–130 (1996)
Bazaraa, M.S., Sherali, H.D., Shetty, C.M.: Nonlinear Programming: Theory and Algorithms, 3rd edn. Wiley, Hoboken (2006)
Betts, J.T.: Practical Methods for Optimal Control and Estimation Using Nonlinear Programming, 2nd edn. Society for Industrial and Applied Mathematics, Philadelphia (2010)
Bock, H.G., Plitt, K.J.: A multiple shooting algorithm for direct solution of optimal control problems. In: Proceedings of 9th World Congress—International Federation of Automatic Control, pp. 242–247 (1984)
Brüls, O., Bastos, G.J., Seifried, R.: A stable inversion method for constrained feedforward control of flexible multibody systems. J. Comput. Nonlinear Dyn. 9, 011014 (2014)
Brüls, O., Eberhard, P.: Sensitivity analysis for dynamic mechanical systems with finite rotations. Int. J. Numer. Methods Eng. 74, 1897–1927 (2008)
Brüls, O., Lemaire, E., Duysinx, P., Eberhard, P.: Optimization of multibody systems and their structural components. Multibody Dynamics: Computational Methods and Applications, Computational Methods in Applied Sciences 23, 49–68 (2011)
Chung, J., Hulbert, G.M.: A time integration algorithm for structural dynamics with improved numerical dissipation: the generalized-\(\alpha \) method. ASME J. Appl. Mech. 60, 371–375 (1993)
Devasia, S., Chen, D., Paden, B.: Nonlinear inversion-based output tracking. IEEE Trans. Autom. Control 41(7), 930–942 (1996)
Diehl, M., Bock, H.G., Diedam, H., Wieber, P.-B.: Fast direct multiple shooting algorithms for optimal robot control. In: Fast Motions in Biomechanics and Robotics. Springer, Berlin (2007)
Fisette, P., Samin, J.C., Vaneghem, B.: Simulation of flexible multibody systems: coordinate partitioning method in an implicit integration scheme. In: Second ECCOMAS Conference on Numerical Methods in Engineering (1996)
Géradin, M., Cardona, A.: Flexible Multibody Dynamics: A Finite Element Approach. Wiley, New York, USA (2001)
Houska, B., Ferreau, H.J., Diehl, M.: ACADO toolkit—an open source framework for automatic control and dynamic optimization. Optim. Control Appl. Methods 32(3), 298–312 (2011)
Leineweber, D. B. Schräfer, A., Bock, H. G., Schlröder, J. P.: An efficient multiple shooting based reduced SQP strategy for large-scale dynamic process optimization: Part ii: Software aspects and applications. In: Computers & Chemical Engineering, pp. 167–174 2003 (2)
Lismonde, A., Sonneville, V., Brüls, O.: A geometric optimization method for the trajectory planning of flexible manipulators. Multibody Syst. Dyn. 47, 347–362 (2019)
Newmark, N.M.: A method of computation for structural dynamics. J. Eng. Mech. Div. (ASCE) 85, 67–94 (1959)
Nocedal, J., Wright, S.J.: Numerical Optimization. Springer, Berlin (1999)
Schulz, V.H., Bock, H.G., Steinbach, M.C.: Exploiting invariants in the numerical solution of multipoint boundary value problems for DAE. SIAM J. Sci. Comput. 19(2), 440–467 (1998)
Seifried, R.: Dynamics of Underactuated Multibody System. Springer, Berlin (2014)
Acknowledgements
The first author thanks the University of Liège, as a part of the work was achieved when he was affiliated with this institution. He also thanks the ”Fundação de Amparo à Ciência e Tecnologia de Pernambuco” for the research support in Brazil through the project APQ-1226-3.05/15 and Prof. Jose Maria Barbosa (DEMEC/UFPE) who provided a multicore computer for tests in parallel computation.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Bastos, G., Brüls, O. Analysis of open-loop control design and parallel computation for underactuated manipulators. Acta Mech 231, 2439–2456 (2020). https://doi.org/10.1007/s00707-020-02656-0
Received:
Revised:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00707-020-02656-0