
Abstract
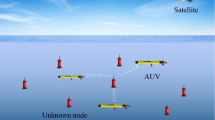
Accurate time synchronization of the nodes of digital underwater acoustic (UWA) networks is necessary for the effective use of information obtained from various kinds of underwater sensors over a vast water area. The sensors of autonomous underwater vehicles (AUV) are widely used to address new challenges. One of them is time synchronization of sensors on mobile carriers, as well as synchronization of the clocks on mobile nodes of UWA networks, for example, teams of AUVs that perform coordinated and/or cooperated operations. The paper presents theresults of the experiments on using UWA modems for AUV positioning, namely, UWA modems with chip-scale atomic clocks (CSAC) that allow accurate measurements of delays in propagation of UWA signals and, thus, accurate estimation of ranges to their georeferenced sources. In addition, the accuracy of CSAC operation in various situations as well as positioning accuracy of AUVs having UWA modems with integrated CSACs are analyzed based on the experimental results. Also given are practical recommendations on how to “discipline” (steer) CSACs and provide their phase synchronization with a source of timekeeping signals.










Similar content being viewed by others

REFERENCES
Antonelli, G., Caffaz, A., Casalino, G., and Pollini, L., The Widely scalable Mobile Underwater Sonar Technology (WiMUST) H2020 project: First year status, Proceedings OCEANS, 2016, Shanghai. https://doi.org/10.1109/OCEANSAP.2016.7485587.
Kebkal, K. and Bannasch, R., Sweep-spread carrier for underwater communication over acoustic channels with strong multipath propagation, J. Ac. Soc. America, 2002, vol. 112 (5), pp. 2043–2052.
Lutwak, R. et al., The Chip-Scale Atomic Clock – coherent population trapping vs. conventional interrogation, Proc. 34th Annual Precise Time and Time Interval Systems and Applications Meeting, December 3–5, 2002, Reston, VA, pp. 539–550.
Poddar, A.K. and Rohde, U.L., Techniques minimize the phase noise in crystal oscillator circuits, IEEE International Symposium on Frequency Control (FCS), 2012.
Rohde, U.L., Poddar, A.K., and Apte, A.M., Getting its Measure: Oscillator phase noise measurement techniques and limitations, IEEE Microwave Magazine, 2013, vol. 14, issue 6.
Stofanik, V., Sam, A.E., Balaz, I., and Minarik, M., Direct digital synthesizer clock frequency versus temperature dependency compensation using two look-up tables, Proc.2004IEEE Joint 50th Anniversary Conference UFFC, pp. 770–774.
Gardner, A.T. and Collins, J.A., A second look at Chip Scale Atomic Clocks for long term precision timing, OCEANS 2016 MTS/IEEE Monterey, Monterey, CA, 2016, pp. 1–9.
Ingram David M.E., Assessment of precision timing and real-time data networks for digital substation automation, PhD by Publication, Queensland University of Technology, 2013.
ACKNOWLEDGMENTS
The work was supported by the European project WiMUST, grant no. 645 141, program H2020-ICT-2014-1. The study was made possible owing to the joint efforts of the WiMUST project partners: the Interuniversity Center of Integrated Systems for the Marine Environment (ISME), Laboratory of Robotics and Engineering, Systems, ISR/Instituto Superior Tecnico, University of Lisbon, Portugal (IST-ID, Portugal), the Center of Technological Research, University of Algarve, Portugal, (CINTAL, Portugal), Graduate School of Computer Science, University of Hertfordshire, CGG (France), Evologics (Germany), Geo Marine Survey Systems (Portugal), Geosurveys (Netherlands), and Graal Tech (Italy).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Kebkal, K.G., Kebkal, A.G., Glushko, E.V. et al. Underwater Acoustic Modems with Synchronous Chip-Scale Atomic Clocks for Scalable Tasks of AUV Underwater Positioning. Gyroscopy Navig. 10, 313–321 (2019). https://doi.org/10.1134/S2075108719040096
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1134/S2075108719040096