On Two-Derivative Runge–Kutta Type Methods for Solving u‴ = f(x,u(x)) with Application to Thin Film Flow Problem



1
Institute for Mathematical Research, Universiti Putra Malaysia, UPM, Serdang 43400, Selangor, Malaysia
2
Department of Mathematics, Universiti Putra Malaysia, UPM, Serdang 43400, Selangor, Malaysia
3
Institute of Visual Informatics, National University of Malaysia, UKM, Bangi 43600, Selangor, Malaysia
*
Author to whom correspondence should be addressed.
†
These authors contributed equally to this work.
Symmetry 2020, 12(6), 924; https://doi.org/10.3390/sym12060924
Submission received: 27 February 2020
/
Revised: 26 March 2020
/
Accepted: 27 March 2020
/
Published: 2 June 2020
(This article belongs to the Special Issue Symmetry in Numerical Analysis and Numerical Methods)
Abstract
:A class of explicit Runge–Kutta type methods with the involvement of fourth derivative, denoted as two-derivative Runge–Kutta type (TDRKT) methods, are proposed and investigated for solving a special class of third-order ordinary differential equations in the form . In this paper, two stages with algebraic order four and three stages with algebraic order five are presented. The derivation of TDRKT methods involves single third derivative and multiple evaluations of fourth derivative for every step. Stability property of the methods are analysed. Accuracy and efficiency of the new methods are exhibited through numerical experiments.
1. Introduction
In this study, we consider the special class of third-order ordinary differential equations (ODEs) in the form:
where is a continuous vector function.
Third-order ordinary differential equations are principally used to outlook and estimate the pattern of scientific problems, including thin film flow, electrical circuits, momentum transport of viscoelastic fluids in porous channels, and other disciplines. A popular approach for solving third-order ODEs is to convert third-order ODEs into a system of first-order ODEs and solve it with traditional first-order methods such as Runge–Kutta method, linear multistep method, and predictor–corrector method. The disadvantage of using this particular way is that it generates higher local truncation error and rounding error that leads to inaccuracy of numerical approximations. This issue led to the construction of direct methods in solving third-order ODEs to improve the accuracy of methods.
Some efforts have been done by several researchers on deriving direct solving methods. Omar et al. [1] proposed a block hybrid method for higher-order initial value problems in the form of a rapidly convergent series. Agboola et al. [2] derived differential transformation method (DTM) with Taylor series-based for solving third-order ODEs. Khataybeh et al. [3] introduced operational matrices of Bernstein polynomials method for solving a class of third-order ODEs directly. Tang and Zhang [4] constructed continuous-stage Runge–Kutta–Nyström methods with Legendre expansion technique in conjunction with the symmetric conditions for solving second-order ordinary differential equations. On the other hand, certain two derivative Runge–Kutta–Nyström methods with inclusion of third derivative have been presented to solve second order ODEs (see Fang et al. [5], Chen et al. [6], Ehigie et al. [7], and Mohamed et al. [8]).
In this research paper, traditional two-derivative direct Runge–Kutta scheme is modified by removing increment function in third derivative and replaced it with single function from the third-order numerical problem as well as inserting evaluation function with fourth derivative in the formulation.
The objective of this paper is to design high-order two-derivative Runge–Kutta type (TDRKT) methods with minimal number of functional evaluation, consisting of two-stages fourth-order and three-stages fifth-order. In Section 2, general formulation of TDRKT methods is proposed. In Section 3, construction of TDRKT method based on rooted tree will be shown and the methods with two-stages fourth-order and three-stages fifth-order are derived. The linear stability analysis of TDRKT methods is discussed. In Section 4, capability of TDRKT methods is illustrated through the numerical test. Numerical results of TDRKT methods and other existing methods are exhibited in Section 5. This paper ends in Section 6 with the discussion and conclusion.
2. The Formulation of TDRKT Methods
TDRKT methods are derived with the inclusion of fourth derivative, , in the formulation as shown below:
s-stage TDRKT methods consist of multiple evaluations in fourth derivative and single evaluation in third derivative that are expressed as follows:
where
where . In addition, Equation (3) can be expressed in Butcher’s tableau (see Table 1):
TDRKT methods are implicit methods if and are not equal to 0 for , and are explicit methods otherwise. Unlike the traditional two-derivative Runge–Kutta type method, TDRKT methods simply comprise of one function evaluation of f and multiple function evaluations of g per step, and thus, having lower amount of total function evaluations than the existing two-derivative Runge–Kutta type methods which consist of numerous evaluations of f and g per step depending on the amount of stages.
3. Construction of TDRKT Methods
In this section, all coefficients of TDRKT methods, will be determined. For obtaining a general formula for higher derivatives of analytical solution of problem (3), we consider the expression of first to seventh derivatives of the analytical solution at .
Fundamental of the set of rooted trees for TDRKT methods are described and analysed as follows (see Chen et al. [6]):
Definition 1.
The set of rooted trees is recursively interpreted as
- (i)
- The graph
![Symmetry 12 00924 i001]() expressed as , with one meagre vertex (root of the rooted tree); the graph
expressed as , with one meagre vertex (root of the rooted tree); the graph ![Symmetry 12 00924 i002]() expessed as ; the graph
expessed as ; the graph ![Symmetry 12 00924 i003]() denoted as ; and lastly,
denoted as ; and lastly, ![Symmetry 12 00924 i004]() denoted as ;
denoted as ; - (ii)
- If are different from , then the graph can be obtained as the roots of connecting downward to white circle vertex, combining the roots of into this black triangle vertex, followed by joining the roots downward to white rectangle vertex and subsequently to the roots into a new black circle vertex (root of ). It is expressed asin which
![Symmetry 12 00924 i005]() is root of the rooted tree t.
is root of the rooted tree t.





The criteria of producing the following rooted tree are as follows:
- (i)
- The meagre vertex is the root of every rooted tree.
- (ii)
- The offspring of meagre vertex must consist of only one white circle vertex.
- (ii)
- The offspring of white circle vertex must consist of only one black triangle vertex.
- (iv)
- The offspring of black triangle vertex must consist of only one white rectangle vertex.
Definition 2.
Order of integer function is expressed as follows:
- (i)
- (ii)
- for ,For every , the order ρ represents the amount of vertices t. The set comprised of all rooted trees with order k is expressed as .
Definition 3.
For every tree , the fundamental differential is a vector function expressed as follows:
- (i)
- ;
- (ii)
- for ,
Definition 4.
An integer function is recursively described as follows:
- (i)
- ;
- (ii)
- for with , and distinct,in which is the product of for .
Theorem 1.
Given the analytical solution of Equation (1) is B-series with real function e prescribed on , then
and for ,
Proof.
By assumption,
The first two derivatives of are shown below:
Through Taylor series expansion of around
For every , elements of rooted tree, density and positive integer can be defined as and . Two propositions can be derived based on Theorem 1.
Proposition 1.
For every tree , density is defined as positive integer function on set (see Chen et al. [6]).
- (i)
- ;
- (ii)
- for
Proposition 2.
For every tree , positive integer is fulfilled (see Chen et al. [6]).
- (i)
- ;
- (ii)
- for whereby distinct, distinct and distinct,where is the product of
Here, B-series of TDRKT methods can be defined as
and can be denoted as
3.1. Analytical Solution and Exact Derivative on B-Series
Theorem 2.
Exact solution and the derivative and of the problem (1) have the forms as follows:
Proof.
The conclusion is based on Theorem 1 and expression (11). □
3.2. Numerical Solution and Numerical Derivative on B-Series
B-series based on TDRKT methods are developed regarding numerical solution of and its numerical derivatives and of the problem (1) produced by TDRKT methods, and are expanded as B-series as and , respectively. Hence, the first three equations in (3) become
Referring to (11) and (12), the previous three equations can be expressed as
It follows
and
Hereby, we denote the vectors for . The rooted trees are of order up to nine, whereby the values of related functions are listed in Table 2. Elementary weight for , can be listed as follows:
and elementary weight for and are expressed as and , respectively,
Thereupon, the numerical solution for and the following numerical derivatives and of the numerical problem that belong to TDRKT methods have B-series as follows:
Order conditions of TDRKT methods up to order eight and selected rooted trees comprised of all order conditions for TDRKT methods with order nine for , and are developed based on B-series in Equation (20) and shown in Appendix A. The selection of rooted trees with order nine is based on the terms of in which duplication of will be eliminated, and rooted trees are not listed in Appendix A due to the concern of yielding a large quantity of pages.
Following are the order conditions for explicit TDRKT methods:
- The order conditions for u:
- Fourth order:
- Fifth order:
- Sixth order:
- The order conditions for :
- Third order:
- Fourth order:
- Fifth order:
- Sixth order:
- The order conditions for :
- Second order:
- Third order:
- Fourth order:
- Fifth order:
- Sixth order:
The simplifying assumption is utilised in generating parameters of TDRKT methods as follows:
3.3. Two-Stage TDRKT Method of Order Four
Algebraic order conditions up to order four in the equations u, , and , comprised of Equations (21), (24) and (25), and (28)–(30) are used to derive the fourth-order TDRKT method. Simplified assumption (22) is utilised to obtain parameters of the methods by yielding a unique solution. Truncation error norms for , , and are given by , , , respectively, with the global truncation error term, . Parameters of the new method are given in Butcher tableau and denoted by TDRKT4 shown in Table 2:
3.4. Three-Stage TDRKT Method of Order Five
Algebraic order conditions up to order five in the equations u, , and comprised of Equations (21) and (22), (24)–(26), and (28)–(31) are used to derive the fifth-order TDRKT method. Altogether, it involves 9 equations, 17 variables, and contains 4 free parameters after solving those equations. and are set with and 0, respectively, to generate a single system of parameters. The resulting system contains two free parameters, and .
Minimising error equations of sixth-order conditions are utilised to select the parameters that generate minimum value of truncation error norms for , and . Minimising error equations generate , and with the global truncation error of , yielding, . Then, these values are substituted into (33) and obtain . Let , which yields from Equation (34). The coefficients of the new method are presented in Butcher tableau and denoted by TDRKT5 as seen in Table 3:
Next, we analyse the numerical properties of TDRKT methods, comprised of zero stability, consistency, and convergence.
Definition 5.
The numerical method with order p is zero-stable if and only if modulus of roots for the first characteristic polynomial are less than or equal to 1 with the numerical solutions remaining bounded as step size, [9].
Matrix finite difference equation of TDRKT methods can be written as
in which I = Identity for matrix ; =; =; , ; , and C are matrices . In the Equation (35), knowing that
Then,
Hence, first characteristic polynomial can be defined as
Thus, TDRKT method is zero-stable with the roots of polynomial, are less than or equal to 1.
Definition 6.
The p-order numerical method is consistent if and only if local truncational error , as (see Suli [10]).
Consider explicit TDRKT methods in the form:
Let , then
where .
TDRKT methods are consistent if and only if Equation (37) fulfils the following conditions:
Applying the conditions (38),
Here, local truncation error at is expressed as the residual when is replaced by which is
where is defined in (38). Assuming that p is the largest integer whereby , then the method has order p (see Lambert [11]). We denote by the value at generated by TDRKT methods when the localising assumption is made. Since
then, we have
TDRKT methods are consistent if they follow (38) that
Since , for TDRKT methods is equal to , it shows that TDRKT methods are consistent with the order at least 4.
Convergence is a numerical property related to truncation errors in which the numerical solution converges onto the exact solution and the global truncation error goes to zero at all step sizes with step size (see Atkinson [12]).
Definition 7.
The numerical method is convergent iff attaining zero stability and consistency (see Lambert [11]).
Since TDRKT methods are zero-stable and consistent, hence, TDRKT methods are convergent.
4. Problem Testing and Numerical Result
In this section, we test the efficiency of the new methods with order four and five on selected numerical problems for comparison purpose. Below are the numerical methods utilised to be compared:
- TDRKT4—Explicit two-derivative Runge–Kutta type method with two stage fourth-order.
- TDRKT5—Explicit two-derivative Runge–Kutta type method with three stage fifth-order.
- RK4—Runge–Kutta fourth-order method as given in Hossain et al. [13].
- RK5—Runge–Kutta fifth-order method as given in Goeken and Johnson [14].
- Mechee4—Explicit two stage fourth-order direct method proposed by Mechee et al. [15].
- Mechee5—Explicit three stage fifth-order direct method proposed by Mechee et al. [16].
- Hussain4—Fourth-order improved Runge–Kutta direct method proposed by Hussain et al. [17].
- Hussain5—Fifth-order improved Runge–Kutta direct method proposed by Hussain et al. [18].
Problem 1
Consider the linear homogeneous problem
whose analytic solution is .
Source: Yap et al. [19]
Problem 2
Consider the nonlinear nonhomogeneous problem
whose analytic solution is
Source: Mechee et al. [16]
Problem 3
Consider the nonlinear homogeneous problem
whose analytic solution is
Problem 4
Consider the nonlinear homogeneous problem
whose analytic solution is
Problem 5
Consider linear nonhomogeneous system
whose analytic solutions are as follows:
Problem 6
Consider an application nonlinear nonhomogeneous problem, thin film flow of viscous liquid driven by surface tension. In this study, we consider nondimensionalised equation of thin film flow equation as follows:
The problem is integrated on the interval with the initial conditions , and this problem can be used to model the draining down of a dry wall of a non-Newtonian thin film (see Momomiat and Mahomed [20]). This equation has no analytical solution (45). Runge–Kutta order 4 method is used to obtain numerical approximation with step size and compare with the selected methods.
5. Numerical Results
6. Discussion and Conclusions
As a whole, a group of explicit two-derivative Runge–Kutta type TDRKT methods that involve one f-evaluation and multiple g-evaluations for solving initial value problems in the form of were presented. These newly proposed methods are the extension from special class direct methods for solving , and these methods comprises of algebraic theories of rooted trees and B-series theory referring to the derivation ideas proposed by Butcher [21,22,23] and Chen et al. [6].
In this study, two-stages of order four and three-stages of order five, denoted as TDRKT4 and TDRKT5 methods, are presented based on the algebraic order conditions in the form of , derivative of to solve special third-order ODEs directly. The properties of stability, consistency, and convergence for both TDRKT methods are analysed.
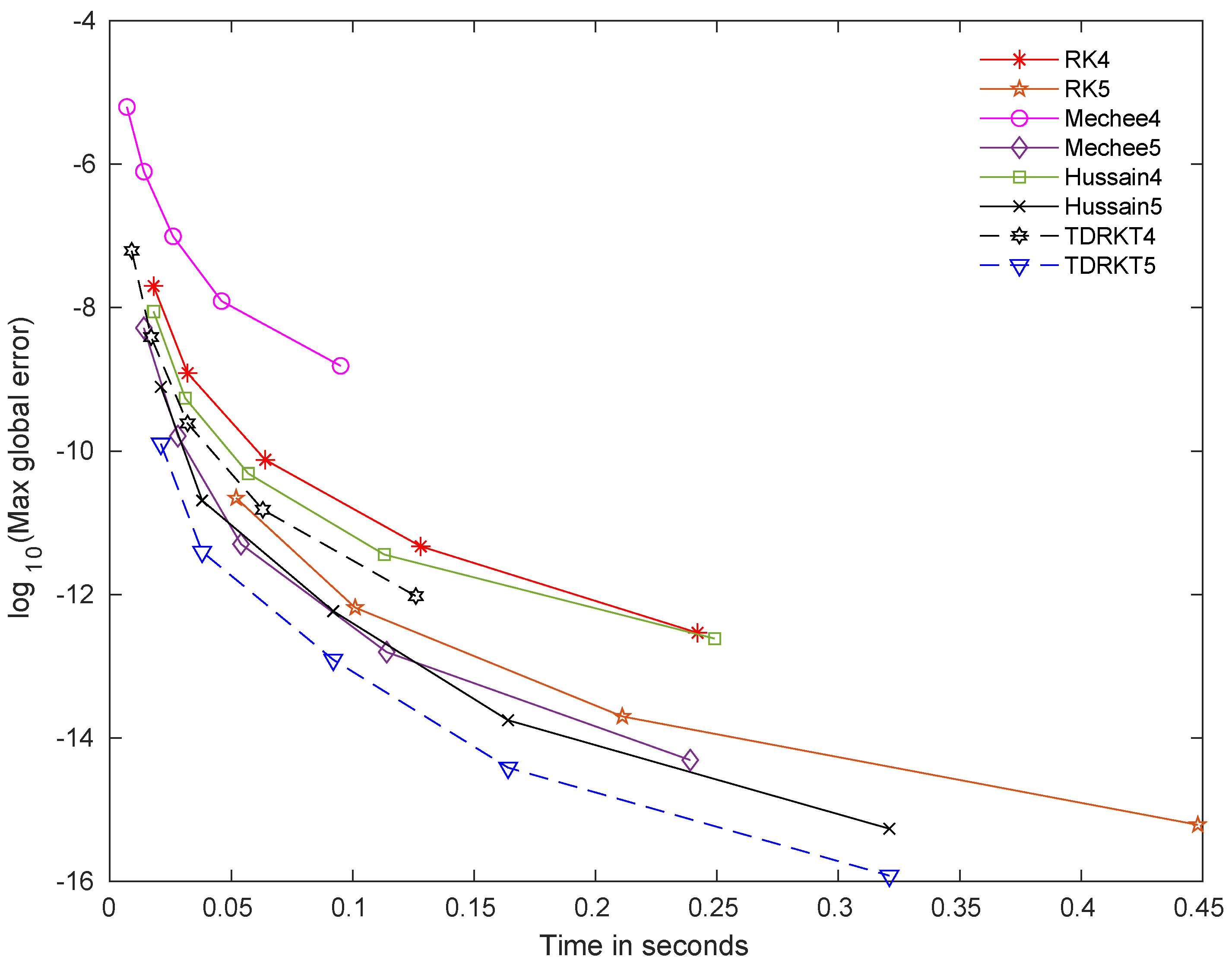
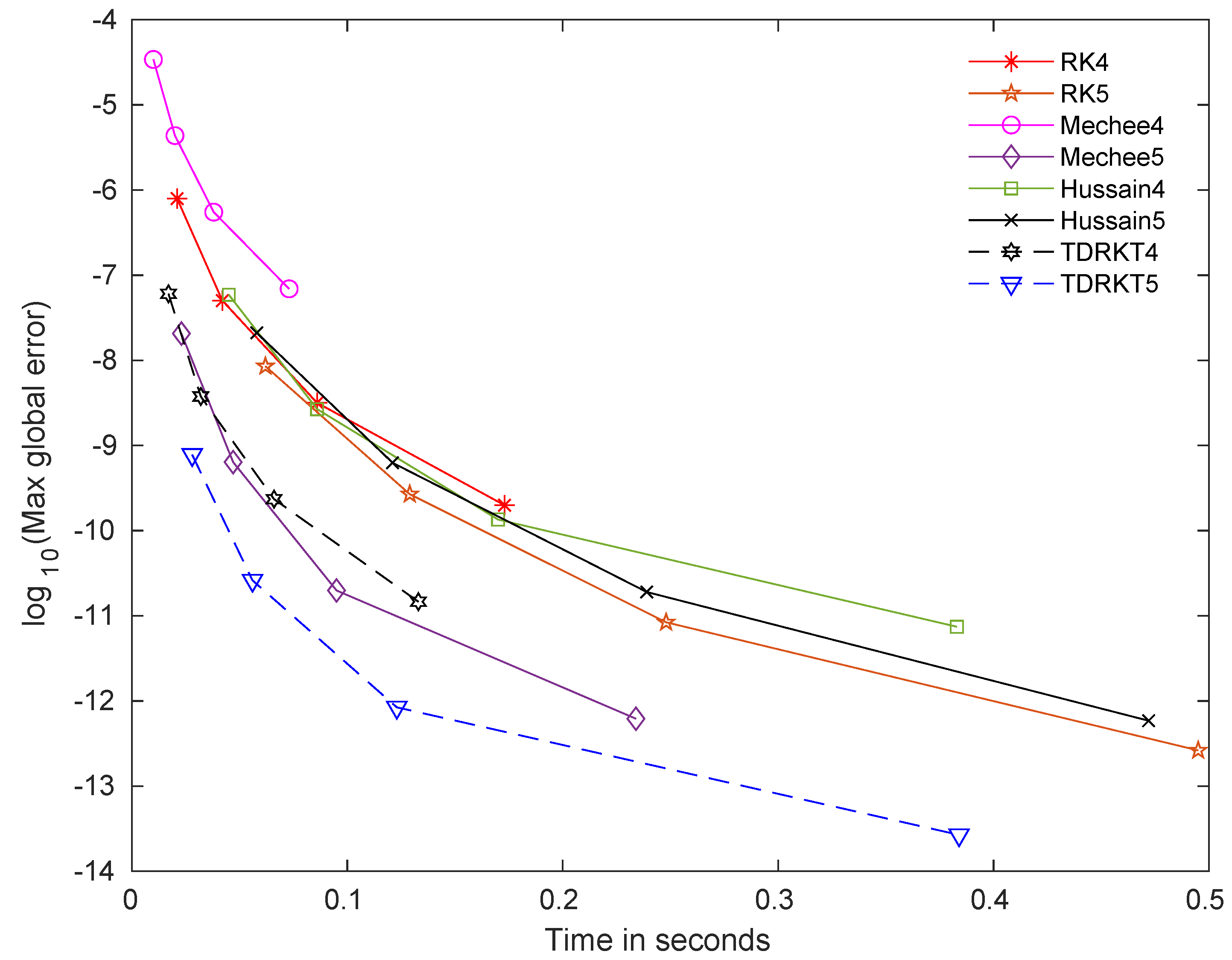
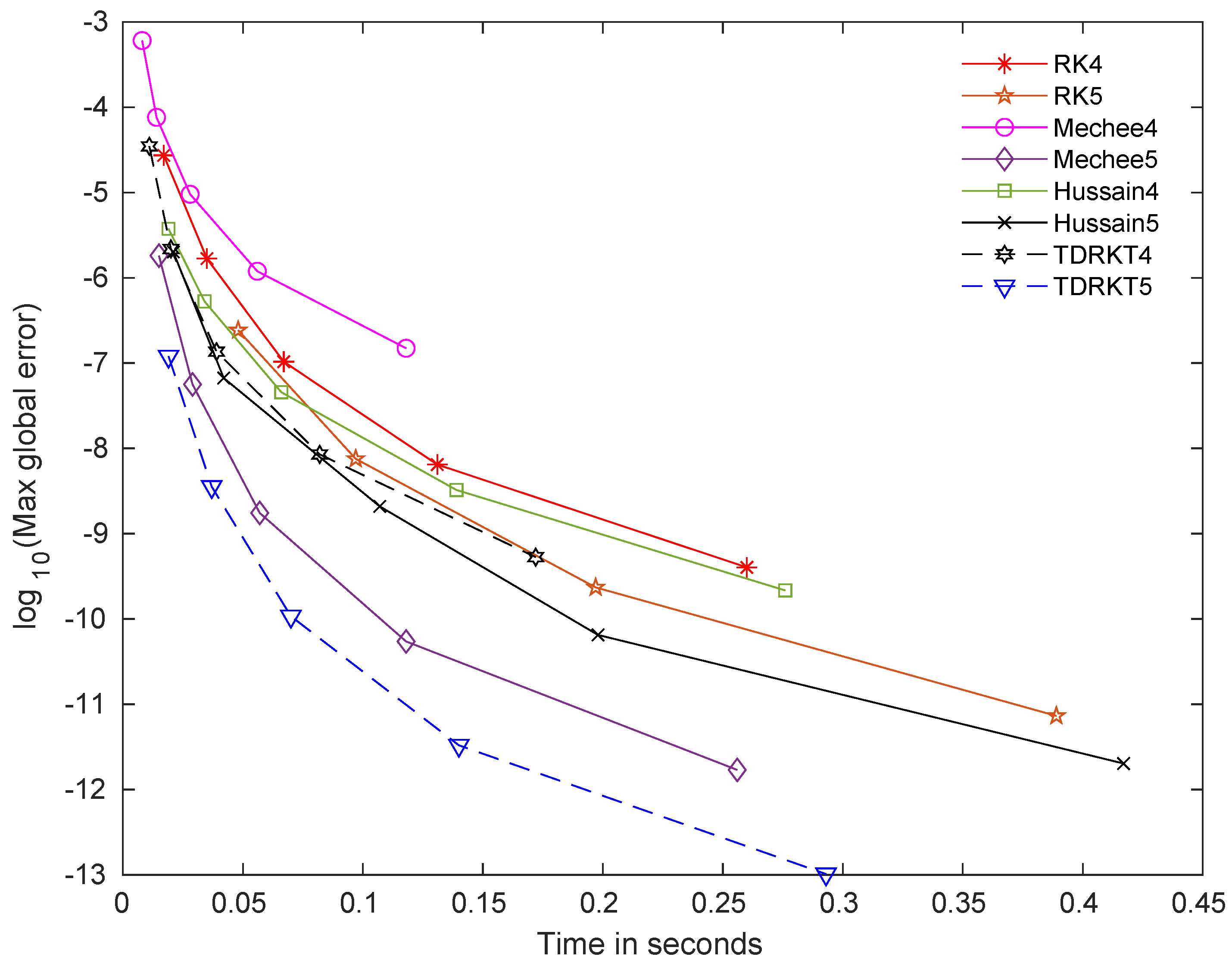
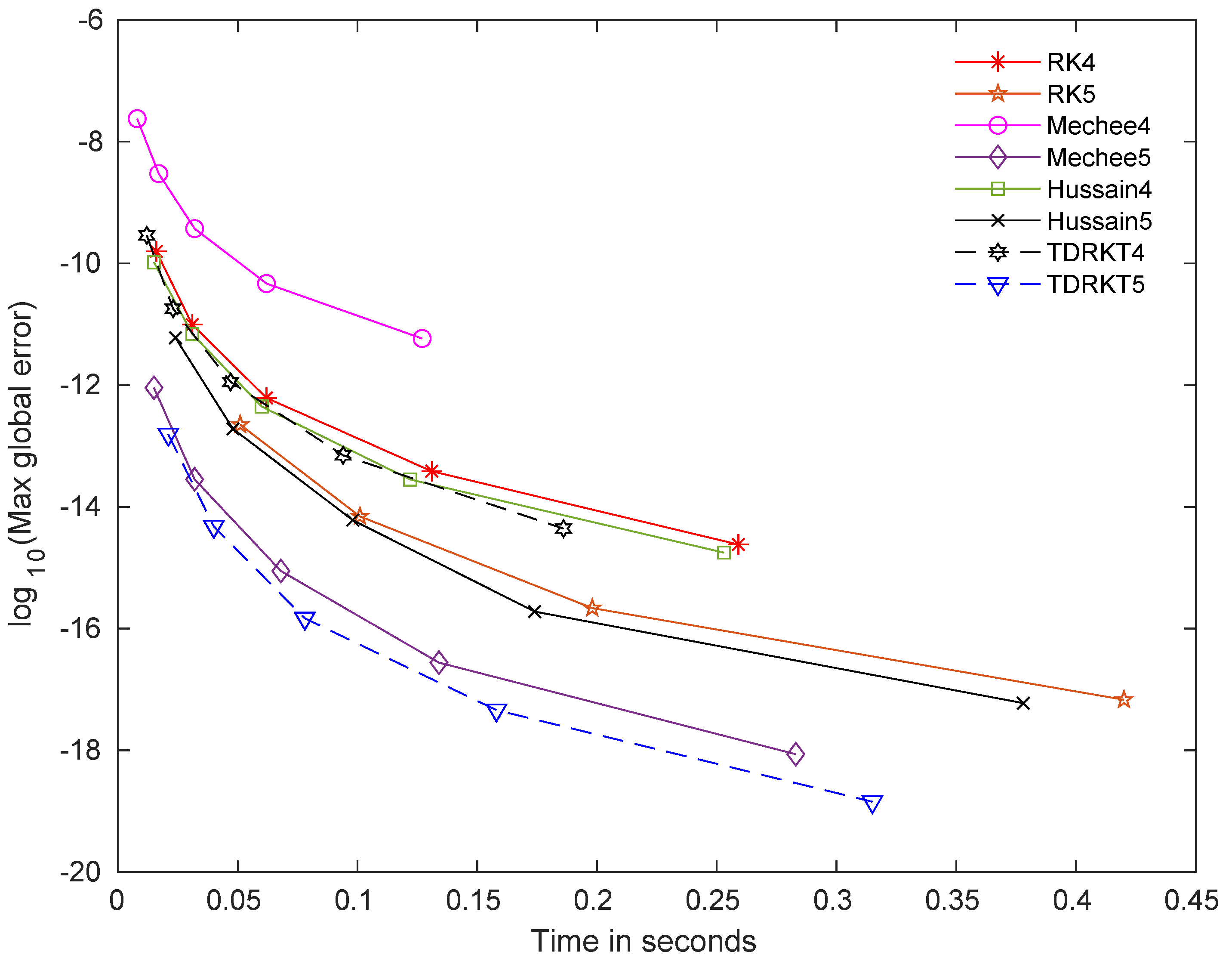
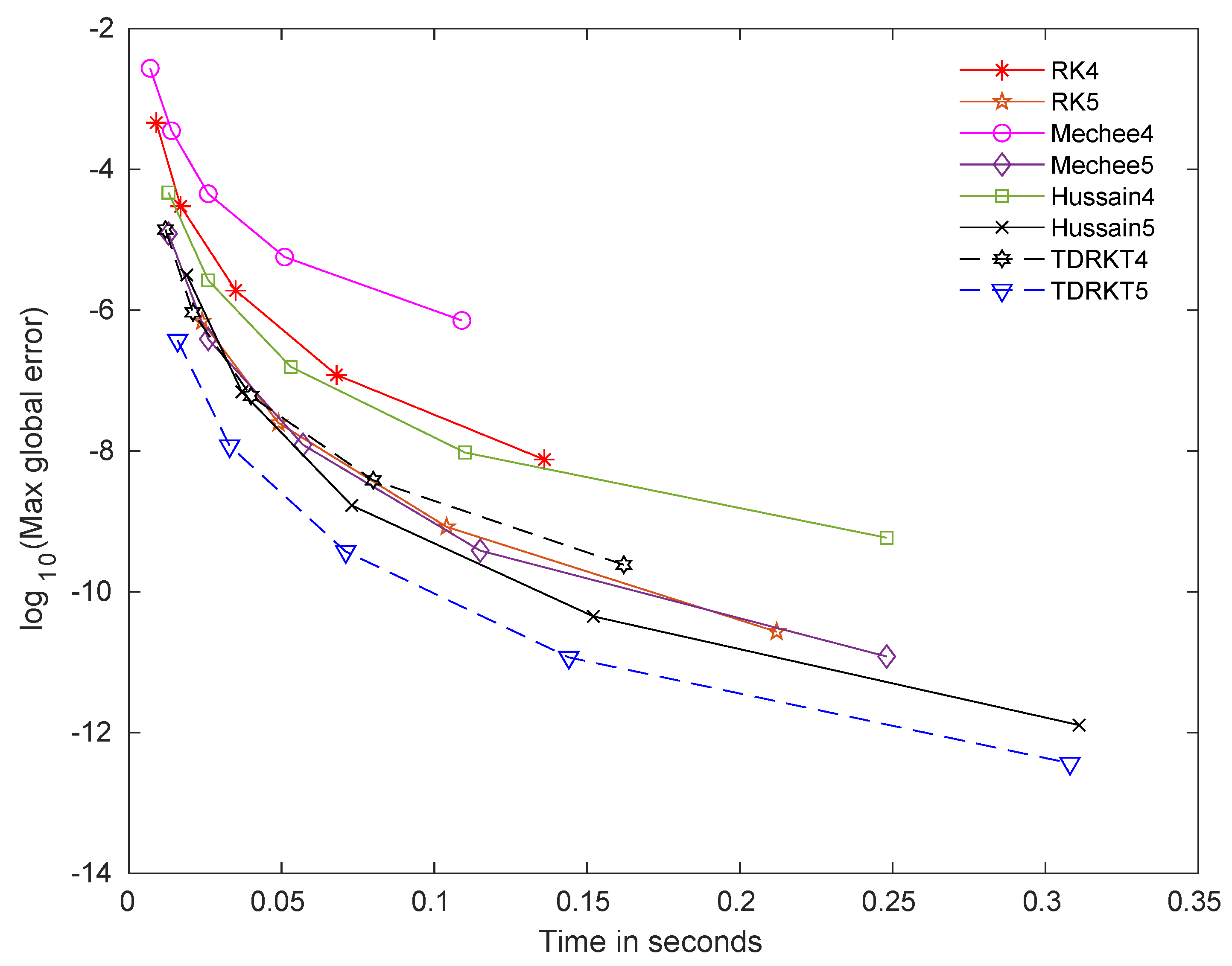
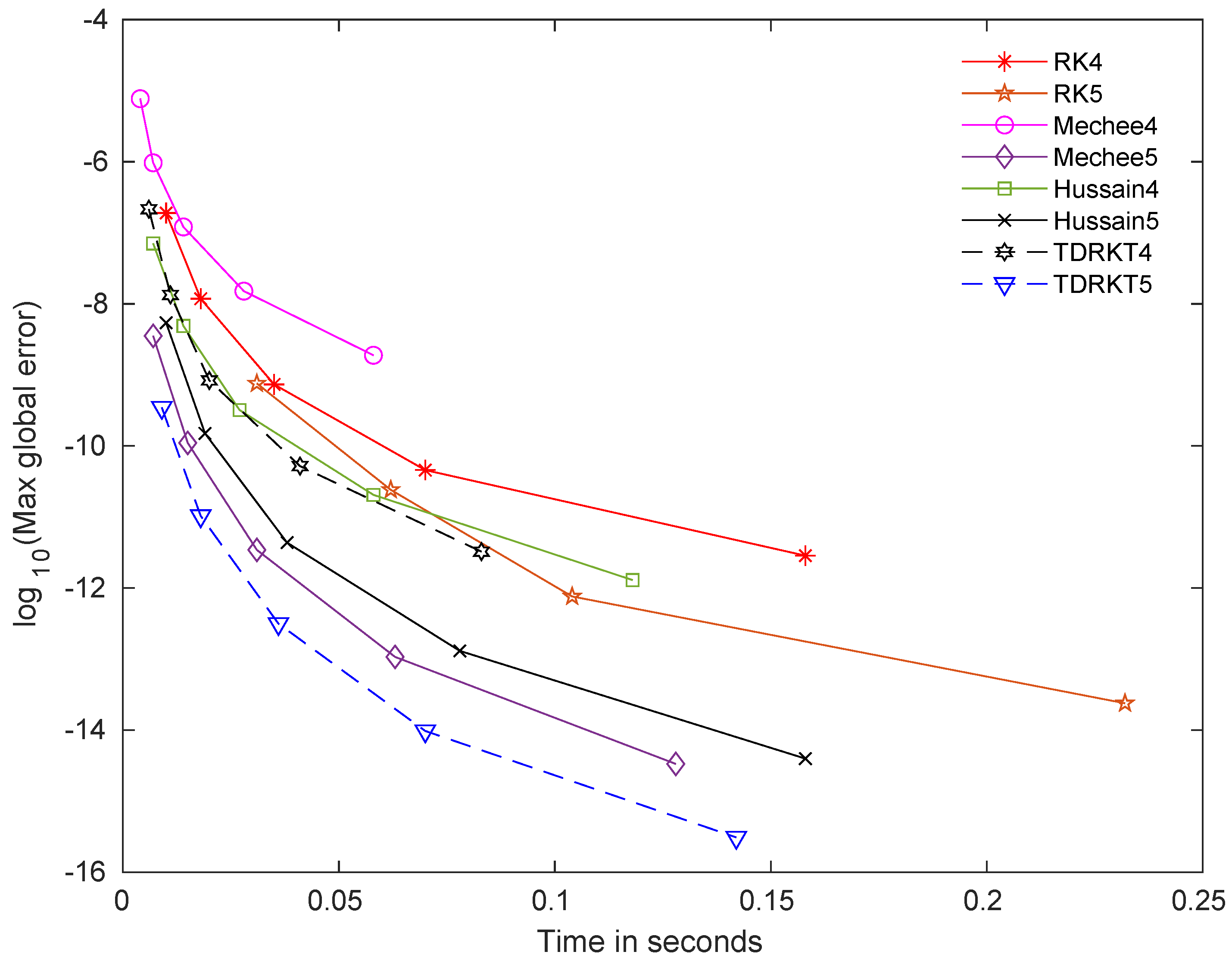
The time curves that measured in terms of maximum global error versus time of computation for newly proposed methods and selected methods are displayed in Figure 1, Figure 2, Figure 3, Figure 4, Figure 5 and Figure 6. TDRKT4 and TDRKT5 methods are compared with the selected methods with the same algebraic order, including of RK4, RK5, Mechee4, Mechee5, Hussain4, and Hussain5 methods. In general, even though TDRKT methods have higher cost of computation compared to most existing methods, they acquired much more accurate approximations with the same step size. Maximum global errors of TDRKT methods are lower than that of other existing methods when computational times are similar. TDRKT4 method is more proficient than RK4, Mechee4, and Hussain4 methods; while TDRKT5 method is more efficient compared to RK5, Mechee5, and Hussain5 methods in solving linear homogeneous and nonhomogeneous problems in Figure 1 and Figure 5. Next, TDRKT4 surpasses RK4, Mechee4, and Hussain4 methods and similar to TDRKT5 method, outperforms RK5, Mechee5, and Hussain5 methods in solving both nonlinear homogeneous and nonhomogeneous problems as shown in Figure 2, Figure 3 and Figure 4. In Figure 6, notice that TDRKT4 method is more capable than RK4, Mechee4, and Hussain4 methods; whereas TDRKT5 method is more potent than RK5, Mechee5, and Hussain5 methods in solving application problems with no exact solution, and the numerical approximations are compared to RK4 methods with h = 0.0001.
From the figures above, it is clearly exhibited that TDRKT methods are more proficient than traditional Runge–Kutta methods and direct Runge–Kutta methods in terms of maximum global error versus computational time. TDRKT methods acquired higher accuracy with the same amount of algebraic order compared to traditional Runge–Kutta type methods. Numerical experiments displayed the great performance from TDRKT methods by generating the least maximum global error with the same computational time compared to existing Runge–Kutta type methods.
Following this research, there are several interesting topics that can be explored. Firstly, explicit TDRKT methods can be modified to improved TDRKT methods with the inclusion of parameter and (previous step of ) in the derivation part. Moreover, TDRKT methods can be enhanced into a hybrid method with symmetry properties or G–symplectic characterisation when applied to time-reversible system. Lastly, TDRKT methods can be adapted to particular types of third-order ODEs such as oscillatory problems. For instance, exponential-fitting or trigonometrically-fitting techniques can be applied to TDRKT methods to make it more effective to solve numerical problems.
Author Contributions
Conceptualization, K.C.L. and N.S.; Methodology, K.C.L. and N.S.; Formal Analysis, K.C.L. and N.S.; Investigation, K.C.L. and N.S.; Resources, K.C.L., A.A., N.S. and S.N.I.I.; Writing-Original Draft Preparation, K.C.L.; Writing-Review and Editing, N.S., A.A. and S.N.I.I.; Supervision, N.S.; Project Administration, N.S.; Funding Acquisition, UPM. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Acknowledgments
This study was supported by the Fundamental Research Grant Scheme (Ref. No. FRGS/1/ 2018/STG06/UPM/02/2) awarded by the Malaysia Ministry of Education and MyBrainSc.
Conflicts of Interest
The authors proclaim no partiality about the publication of this paper.
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table A1.
Root trees for TDRKT methods up to order nine.




References
- Omar, A.A.; Zaer, A.; Ramzi, A.; Shaher, M. A reliable analytical method for solving higher-order initial value problems. Discret. Dyn. Nat. Soc. 2013, 2013, 673829. [Google Scholar]
- Agboola, O.O.; Opanuga, A.A.; Gbadeyan, J.A. Solution of third order ordinary differential equations using differential transform method. Glob. J. Pure Appl. Math. 2015, 11, 2511–2516. [Google Scholar]
- Khataybeh, S.N.; Hashim, I.; Alshbool, M. Solving directly third-order ODEs using operational matrices of Bernstein polynomials method with applications to fluid flow equations. J. King Saud-Univ.-Sci. 2019, 31, 822–826. [Google Scholar] [CrossRef]
- Tang, W.S.; Zhang, J.J. Symmetric integrator based on continuous-stage Runge–Kutta–Nyström methods for reversible systems. Appl. Math. Comput. 2019, 361, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Fang, Y.L.; You, X.; Ming, Q.H. Trigonometrically fitted two-derivative Runge-Kutta methods for solving oscillatory differential equations. Numer. Algorithms 2014, 63, 651–667. [Google Scholar] [CrossRef]
- Chen, Z.; Qiu, Z.; Li, J.; You, X. Two-derivative Runge-Kutta-Nyström methods for second-order ordinary differential equations. Numer. Algorithms 2015, 70, 897–927. [Google Scholar] [CrossRef]
- Ehigie, J.O.; Zou, M.M.; Hou, X.L.; You, X. On modified TDRKN methods for second-order systems of differential equations. Int. J. Comput. Math. 2017, 95, 1–15. [Google Scholar] [CrossRef]
- Mohamed, T.S.; Senu, N.; Ibrahim, Z.B.; Nik Long, N.M.A. Efficient two-derivative Runge-Kutta-Nyström for solving general second-order ordinary differential equations. Discret. Dyn. Nat. Soc. 2018, 2018, 2393015. [Google Scholar] [CrossRef] [Green Version]
- Henrici, P. Discrete Variable Methods in Ordinary Differential Equations; John Wiley & Sons: New York, NY, USA, 1962. [Google Scholar]
- Suli, E.; Mayers, D.F. Discrete Variable Methods in Ordinary Differential Equations; Cambridge University Press: Cambridge, UK, 2003; pp. 337–340. [Google Scholar]
- Lambert, J.D. Numerical Methods for Ordinary Differential Systems: The Initial Value Problem; John Wiley & Sons, Inc.: New York, NY, USA, 1991. [Google Scholar]
- Atkinson, K.; Han, W.; Stewart, D. Numerical Solution of Ordinary Differential Equations: Convergence, Stability and Asymptotic Error; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2009. [Google Scholar]
- Hossain, B.; Hossain, J.; Miah, M.; Alam, S. A comparative study on fourth order and butcher’s fifth order runge-kutta methods with third order initial value problem (IVP). Appl. Comput. Math. 2017, 6, 243–253. [Google Scholar] [CrossRef] [Green Version]
- Goeken, D.; Johnson, O. Fifth-order Runge-Kutta with higher order derivation approximations. Electron. J. Differ. Equ. 1999, 95, 1–9. [Google Scholar]
- Mechee, M.; Ismail, F.; Siri, Z.; Senu, N. A third-order direct integrators of Runge-Kutta type for special third-order ordinary and delay differential equations. Asian J. Appl. Sci. 2014, 7, 102–116. [Google Scholar] [CrossRef] [Green Version]
- Mechee, M.; Senu, N.; Ismail, F.; Nikouravan, B.; Siri, Z. Three-stage fifth-order Runge-Kutta method for directly solving special third-order differential equation with application to thin film flow problem. Math. Probl. Eng. 2013, 2013, 795397. [Google Scholar] [CrossRef]
- Hussain, K.A.; Ismail, F.; Senu, N.; Rabiei, F. Fourth-order improved Runge–Kutta method for directly solving special third-order ordinary differential equations. Iran. J. Sci. Technol. Trans. Sci. 2017, 41, 429–437. [Google Scholar] [CrossRef]
- Hussain, K.A.; Ismail, F.; Senu, N.; Rabiei, F.; Ibrahim, R. Integration for special third-order ordinary differential equations using improved Runge-Kutta direct method. Malays. J. Sci. 2015, 34, 172–179. [Google Scholar] [CrossRef]
- Yap, L.K.; Ismail, F.; Senu, N. An accurate block hybrid collocation method for third order ordinary differential equations. J. Appl. Math. 2014, 2014, 673829. [Google Scholar] [CrossRef] [Green Version]
- Momoniat, E.; Mahomed, F.M. Symmetry reduction and numerical solution of third-order ode from thin film flow. Math. Comput. Appl. 2015, 15, 709–719. [Google Scholar] [CrossRef] [Green Version]
- Butcher, J.C. Numerical methods for ordinary differential methods in the 20th century. J. Comput. Appl. Math. 2000, 125, 1–29. [Google Scholar] [CrossRef] [Green Version]
- Butcher, J.C. Numerical Methods for Ordinary Differential Equations; John Wiley & Sons: Chichester, UK, 2008. [Google Scholar]
- Butcher, J.C. Trees, stumps, and applications. Axioms 2018, 7, 52. [Google Scholar] [CrossRef] [Green Version]
Figure 1.
Time curves for all methods for problem 1 with .

Figure 2.
Time curves for all methods for problem 2 with .

Figure 3.
Time curves for all methods for problem 3 with .

Figure 4.
Time curves for all methods for problem 4 with .

Figure 5.
Time curves for all methods for problem 5 with .

Figure 6.
Time curves for all methods for problem 6 with .

Table 1.
Two-derivative Runge–Kutta type (TDRKT) methods in Butcher tableau.
| C | a | ||
Table 2.
Butcher Tableau of TDRKT4 method.
| 0 | 0 | 0 | ||||
| 0 | 0 | |||||
Table 3.
Butcher Tableau of TDRKT5 method.
| 0 | 0 | 0 | |||||||
| 0 | 0 | ||||||||
| 0 | 0 | 0 | |||||||
| 0 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Lee, K.C.; Senu, N.; Ahmadian, A.; Ibrahim, S.N.I. On Two-Derivative Runge–Kutta Type Methods for Solving u‴ = f(x,u(x)) with Application to Thin Film Flow Problem. Symmetry 2020, 12, 924. https://doi.org/10.3390/sym12060924
AMA Style
Lee KC, Senu N, Ahmadian A, Ibrahim SNI. On Two-Derivative Runge–Kutta Type Methods for Solving u‴ = f(x,u(x)) with Application to Thin Film Flow Problem. Symmetry. 2020; 12(6):924. https://doi.org/10.3390/sym12060924
Chicago/Turabian StyleLee, Khai Chien, Norazak Senu, Ali Ahmadian, and Siti Nur Iqmal Ibrahim. 2020. "On Two-Derivative Runge–Kutta Type Methods for Solving u‴ = f(x,u(x)) with Application to Thin Film Flow Problem" Symmetry 12, no. 6: 924. https://doi.org/10.3390/sym12060924
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.