
Abstract
Theory of mind (ToM) is the ability to understand others’ mental states (e.g., intentions). Studies on human ToM show that the way we understand others’ mental states is very efficient, in the sense that observing only some portion of others’ behaviors can lead to successful performance. Recently, ToM has gained interest in robotics to build robots that can engage in complex social interactions. Although it has been shown that robots can infer others’ internal states, there has been limited focus on the data utilization of ToM mechanisms in robots. Here we show that robots can infer others’ intentions based on limited information by selectively and flexibly using behavioral cues similar to humans. To test such data utilization, we impaired certain parts of an actor robot’s behavioral information given to the observer, and compared the observer’s performance under each impairment condition. We found that although the observer’s performance was not perfect compared to when all information was available, it could infer the actor’s mind to a degree if the goal-relevant information was intact. These results demonstrate that, similar to humans, robots can learn to infer others’ mental states with limited information.









Similar content being viewed by others



References
Premack D, Woodruff G (1978) Does the chimpanzee have a theory of mind? Behav Brain Sci 4:515–526
Gallese V, Goldman A (1998) Mirror neurons and the simulation theory of mind-reading. Trends Cogn Sci 2:493–501
Baron-Cohen S, Wheelwright S, Jolliffe T (1997) Is there a “language of the eyes”? Evidence from normal adults, and adults with autism or Asperger syndrome. Vis Cogn 4:311–331
Carpenter M, Call J, Tomasello M (2005) Twelve- and 18-month-olds copy actions in terms of goals. Dev Sci 8:F13–F20
Fong T, Nourbakhsh I, Dautenhahn K (2003) A survey of socially interactive robots. Robot Auton Syst 42:143–166
Kim K-J, and Lipson H (2009) Towards a “theory of mind” in simulated robots. In: Proceedings of the 11th annual conference companion on genetic and evolutionary computation conference. pp 2071–2076
Kim K-J, Lipson H (2009) Towards a simple robotic theory of mind. In: Proceedings of the 9th workshop on performance metrics for intelligent systems. pp 131–138
Kim K-J, Cho S-B (2015) Inference of other’s internal neural models from active observation. BioSystems 128:37–47
Meltzoff AN, Decety J (2003) What imitation tells us about social cognition: a rapprochement between developmental psychology and cognitive neuroscience. Philos Trans R Soc Lond B Biol Sci 358:491–500
Meltzoff AN, Moore M (1997) Explaining facial imitation: a theoretical model. Early Dev Parent 6:179–192
Hillyard SA, Hink RF, Schwent VL, Picton TW (1973) Electrical signs of selective attention in the human brain. Science 182:177–180
Moran J, Desimone R (1985) Selective attention gates visual processing in the extrastriate cortex. Science 229:782–784
Baldwin DA, Baird JA, Saylor MM, Clark MA (2001) Infants parse dynamic action. Child Dev 72:708–717
Zadny J, Gerard HB (1974) Attributed intentions and informational selectivity. J Exp Soc Psychol 10:34–52
Sonne T, Kingo OS, Krojgaard P (2016) Occlusions at event boundaries during encoding have a negative effect on infant memory. Conscious Cogn 41:72–82
Lakusta L, DiFabrizio S (2017) And the winner is…A visual preference for endpoints over starting points in infant’s motion event representations. Infancy 22(3):323–343
Csibra G, Bíró S, Koós O, Gergely G (2003) One-year-old infants use teleological representations of actions productively. Cogn Sci 27:111–133
Daum MM, Prinz W, Aschersleben G (2008) Encoding the goal of an object-directed but uncompleted reaching action in 6- and 9-month-old infants. Dev Sci 11:607–619
Meltzoff AN (1995) Understanding the intentions of others: re-enactment of intended acts by 18-month-old children. Dev Psychol 31:838–850
Brandone AC, Horwitz SR, Aslin RN, Wellman HM (2014) Infants’ goal anticipantion during failed and successful reaching actions. Dev Sci 17:23–34
Kim EY, Song H-J (2015) Six-month-olds actively predict others’ goal-directed actions. Cogn Dev 33:1–13
Applin JB, Kibbe MM (2019) Six-month-old infnants predict agents’ goal-directed actions on occuluded objects. Infancy 24:392–410
Scassellati B (2002) Theory of mind for a humanoid robot. Auton Robots 12:13–24
Bien ZZ, Park K-H, Jung J-W, Do J-H (2005) Intention reading is essential in human-friendly interfaces for the elderly and the handicapped. IEEE Trans Ind Inform 52:1500–1505
Kaliouby RE, Robinson P (2004) Mind reading machines: automated inference of cognitive mental states from video. Conf Proc IEEE Int Conf Syst Man Cybern 1:682–688
Buchsbaum D, Blumberg B, Breazeal C, Meltzoff AN (2005) A simulation-theory inspired social learning system for interactive characters. In: IEEE international workshop on robot and human interactive communication. pp 85–90
Breazeal C, Buchsbaum D, Gray J, Gatenby D, Blumberg B (2005) Learning from and about others: towards using imitation to bootstrap the social understanding of others by robots. Artif Life 11:31–62
Gray J, Breazeal C, Berlin M, Brooks A, Lieberman J (2005) Action parsing and goal inference using self as simulator. In: IEEE international workshop on robot and human interactive communication. pp 202–209
Kelley R, King C, Tavakkoli A, Nicolescu M, Nicolescu M, Bebis G (2008) An architecture for understanding intent using a novel hidden markov formulation. Int J Hum Robot 5(2):1–22
Yokoya R, Ogata T, Tani J, Komatani K, Okuno HG (2007) Discovery of other individuals by projecting a self-model through imitation. In: IEEE/RSJ international conference on intelligent robots and systems. pp 1009–1014
Demiris Y, Johnson M (2003) Distributed, predictive perception of actions: a biologically inspired robotics architecture for imitation and learning. Connect Sci 15(4):231–243
Takanashi T, Kawamata T, Asada M, Negrello M (2007) Emulation and behavior understanding through shared values. In: IEEE/RSJ international conference on intelligent robots and systems. pp 3950–3955
Kim KJ, Eo KY, Jung YR, Kim SO, Cho SB (2013) Evolutionary conditions for the emergence of robotic theory of mind with multiple goals. In: IEEE workshop on robotic intelligence in informationally structured space. pp 48–54
Bongard J, Lipson H (2007) Automated reverse engineering of nonlinear dynamical systems. Proc Natl Acad Sci USA 104:9943–9948
Bongard J, Zykov V, Lipson H (2006) Resilient machines through continuous self-modeling. Science 314:1118–1121
Saxena A, Lipson H, Valero-Cuevas FJ (2012) Functional inference of complex anatomical tendinous networks at a macroscopic scale via sparse experimentation. PLoS Comput Biol 8:e1002751
Seung HS, Opper M, Sompolinsky H (1992) Query by committee. In: Proceedings of the fifth annual ACM workshop on computational learning theory. pp 287–294
Zacks JM (2004) Using movement and intentions to understand simple events. Cogn Sci 28:979–1008
Baker CL, Saxe R, Tenenbaum JB (2009) Action understanding as inverse planning. Cognition 113:329–349
Field DJ, Hayes A, Hess RF (1993) Contour integration by human visual system: evidence for a local “association field”. Vis Res 33:173–193
Prinzmetal W, Banks WP (1977) Good continuation affects visual detection. Percept Psychophys 21:389–395
Aslin RN, Saffran JR, Newport EL (1998) Computation of conditional probability statistics by 8-month-old infants. Psychol Sci 9:321–324
Buchsbaum D, Griffiths TL, Gopnik A, Baldwin DA (2009) Learning from actions and their consequences: Inferring causal variables from continuous sequences of human action. In: Proceedings of the 31st annual conference of the cognitive science society. pp 2493–2498
Allen K, Ibara S, Seymour A, Cordova N, Botvinick M (2010) Abstract structural representations of goal-directed behavior. Psychol Sci 21:1518–1524
Beyer HG, Schwefel HP (2002) Evolution strategies a comprehensive introduction. Nat Comput 1:3–52
Kim KJ, Wang A, Lipson H (2010) Automated synthesis of resilient and tamper-evident analog circuits without a single point of failure. Genet Program Evol Mach 11:35–59
Kim TS, Na JC, Kim KJ (2012) Optimization of autonomous car controller using self-adaptive evolutionary strategy. Int J Adv Robot Syst 9:73. https://doi.org/10.5772/50848
Chellapilla K, Fogel DB (2001) Evolving an expert checkers playing program without using human expertise. IEEE Trans Evol Comput 5:422–428
Beyer HG (1996) Toward a theory of evolution strategies: self-adaptation. Evolut Comput 3:311–347
Acknowledgements
The authors would like to thank Woon Ju Park, Sang-Ah Yoo, and Kangyong Eo for running the experimentations and making the early draft of this paper.
Funding
K.-J. Kim was supported by Ministry of Culture, Sports and Tourism (MCST) and Korea Creative Content Agency (KOCCA) in the Culture Technology (CT) Research & Development Program 2020, and S.-B. Cho was supported by Defense Acquisition Program Administration and Agency for Defense Development under the contract (UD190016ED).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Appendix A: Actor Learning
Actor’s neural network is defined with the real-valued parameters. It is assumed that observer has no direct access to the parameters but attempts to infer them from the behaviors (trajectories) of the actor. The actor’s NN evolved to move towards a light source placed in the environment (the light is placed at (L_X, L_Y)). The evolution aims at finding the parameters (weights) in the NN that controls the robot behavior. Because these parameters are real-valued, there are a very large number of NN candidates. An evolutionary algorithm, inspired by natural evolution, guides the search for the NN parameters.
In this paper, we adopt an evolutionary strategy (ES) [45], which has been used for many engineering problems (for example, game strategy and analog circuit evolution [46,47,48]). The ES is relatively simpler than other evolutionary methods but it has been successful in optimizing real-valued parameters for engineering problems. For example, it successfully optimized 1741 weights of neural networks which played checkers (better than 99.61% of the playing population of zone.com players) [48].
In ES, each solution initializes the neural network’s weights and corresponding mutation step-size. The evolutionary search optimizes both the mutation strength and the weights of NNs together. Only those individuals with high fitness value get a chance of selection. It is a deterministic process in which only the best half from the pool of parents and offspring survive to the next generation. The selection technique is called “truncation” or “breeding” selection [45].
The details of the ES are as follows. Initially, P NNs (parents) are generated randomly (P is the population size). Weights (including the bias weights) are selected from a uniform distribution with a range of − 0.2 to 0.2. Each weight has a corresponding mutation step-size initialized at 0.05. Each parent NN generates one offspring through a mutation yielding 2 × P neural networks (parents + offspring). The mutation operator is defined as follows (it slightly changes the current weight \( w_{i} (j) \) to new one \( w^{\prime}_{i} (j) \) to produce the offspring):
where Nw is the number of weights, \( \tau \) is the learning parameter, \( w_{i} (j) \) is the jth weight of the ith neural network in the population, \( \sigma_{i} (j) \) is the corresponding mutation-step size for \( w_{i} (j) \) and Nj(0,1) is a standard Gaussian random variable re-sampled for every j. The parameter is defined as follows.
The parameter in Eq. (11) is chosen using theoretical and empirical evidence [49].
From a pool of parents and offspring, only half survive to the next generation based on fitness. Because the goal of this evolution was to reach the light, fitness was measured by the Euclidean distances between the robot and the light source at each time point during the navigation.
It sorts the 2 × P candidate NNs (parents + offspring) based on the fitness. Only half of them survive to be parents in the next generation.
Appendix B: Robot’s Details
-
Body (Morphology) The robot is like a tricycle which has a big main body and three wheels (one front wheel and two rear wheels) (Fig. 3a). The radius of the sphere is 1 m. The wheel’s radius and width are 0.5 and 0.3 meters, respectively. The density of the robot is 5 kg/m3. It is modified based on the sample tricycle (with a rectangular body) from the PhysX simulator.
-
Sensors The robots have two light sensors. Sensors are located on the front side of the upper hemisphere of the robot’s body and they detect light levels around the body. The sensors are located at + π/4 and − π/4 positions. The light levels are measured using the following equation (r: Euclidean distance between the sensor and the light source, θ: the angle between the sensor and the light source)
$$ sensor\_value = \frac{1000}{{r^{2} }}\cos (\theta ) $$(13) -
Actuators At each time step (per 1/60 s), the simulator sets the angle (− 1/3π to 1/3π) of the front wheel and the speed of the rear wheels based on the outputs from the controller. The maximum speed of the robot is 4 m/s.
-
Controller The robots received two (right and left) light sensor values which are sent to the NN, producing two real-values for the direction and speed of the wheels (Fig. 3b). The model has three hidden neurons and two output neurons. The number of weights is 17, consisting of 12 connection weights and 5 biases. Because each neuron has one bias, the number of biases is the same to that of neurons in the neural network. A hyperbolic tangent is used as a sigmoid function. The actor learned to move towards a light source by evolving an “innate” NN through its interaction with the environment. In this way, the actor is able to follow the light source using its unique neural controller (see Fig. 10).
Fig. 10 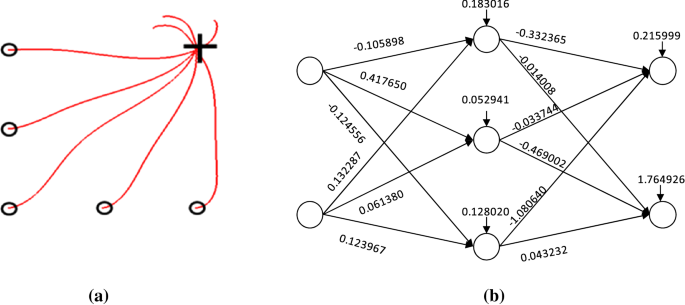
The behavior and neural topology of the actor. a The figure shows the trajectories of the neural network (the black cross is the light source and the circle represents the starting positions of the robot. The robot’s initial angle is set as 0 degree.) b The actor robot’s neural network model evolved to reach the light. The figure shows the weights of the actor’s NN evolved

Rights and permissions
About this article

Cite this article
Kim, KJ., Cho, SB. Inference of Other’s Minds with Limited Information in Evolutionary Robotics. Int J of Soc Robotics 13, 661–676 (2021). https://doi.org/10.1007/s12369-020-00660-x
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12369-020-00660-x