3D Characterization of a Coastal Freshwater Aquifer in SE Malta (Mediterranean Sea) by Time-Domain Electromagnetics

 , , , , and
, , , , and
Abstract
:1. Introduction
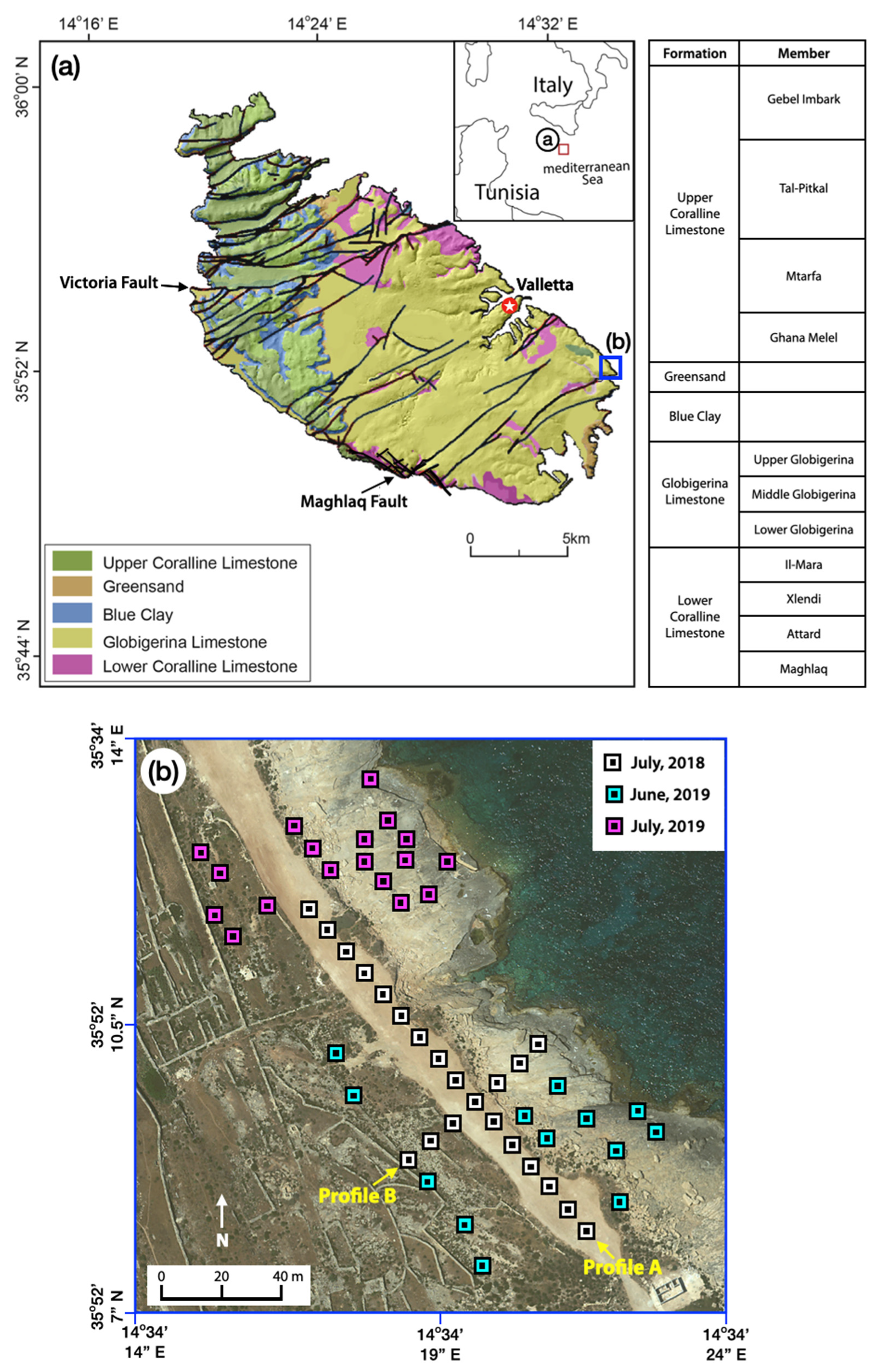
2. Characterization of Mean Sea-Level Aquifer and Study Area
3. Methods
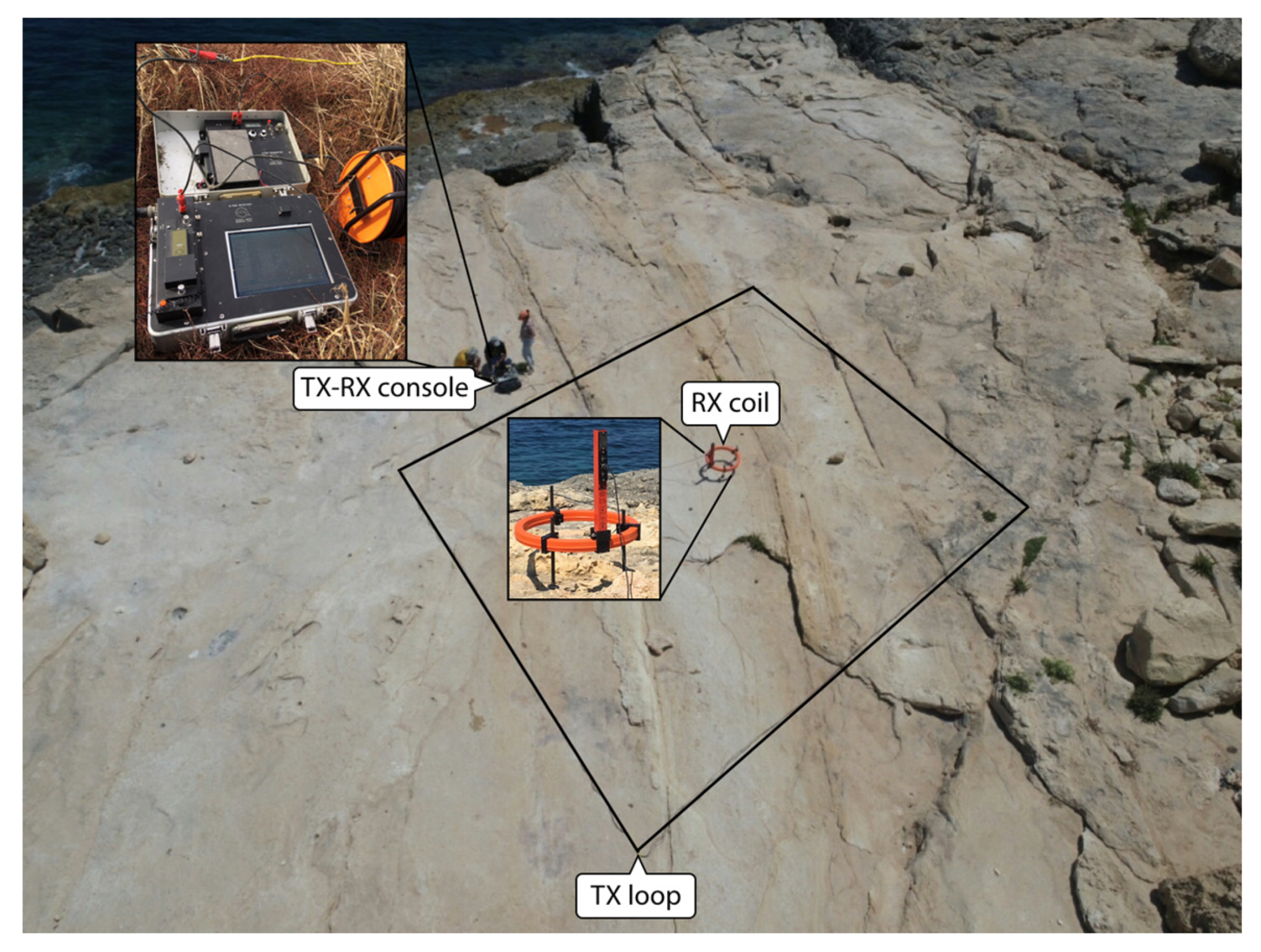
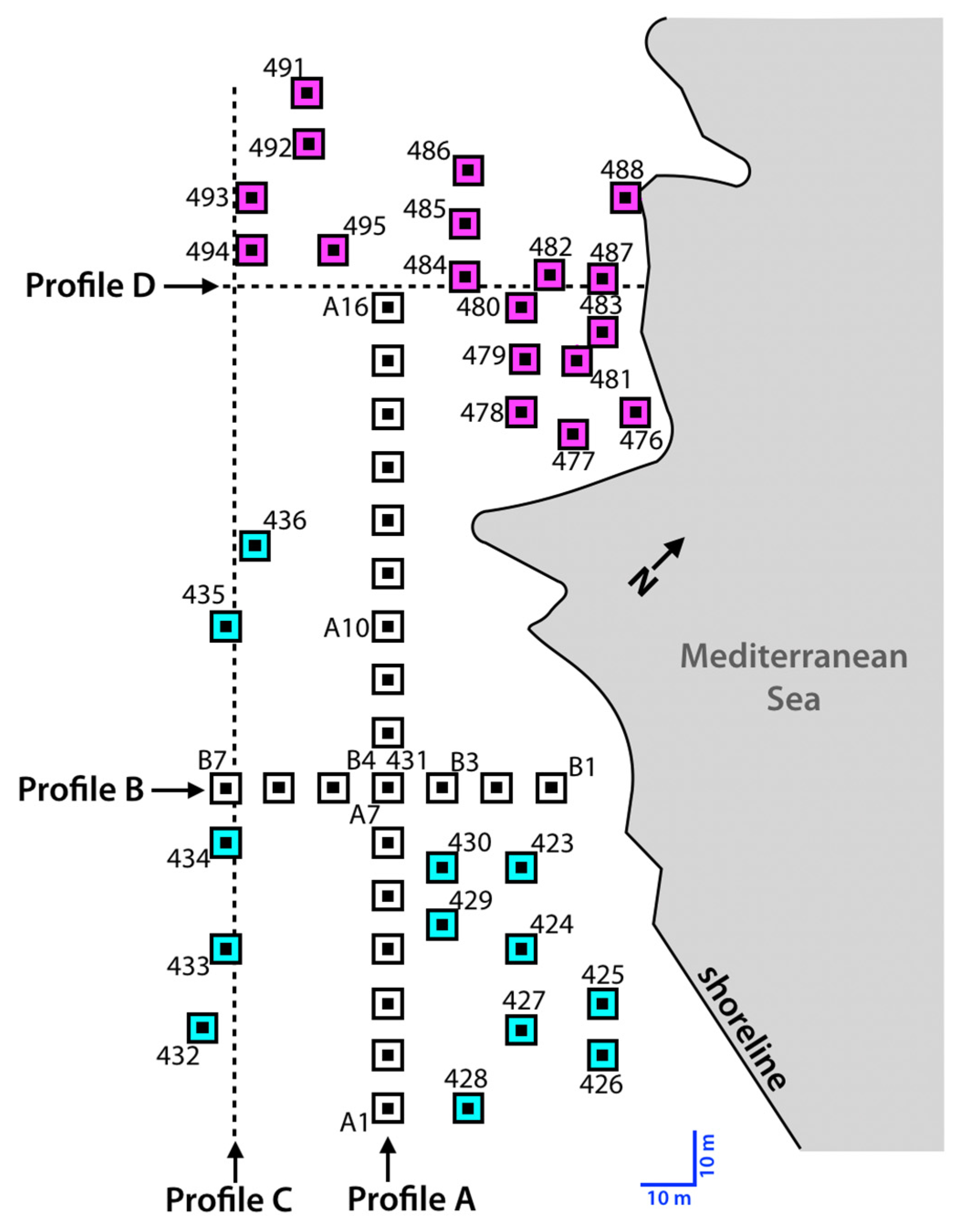
3.1. Data Acquisition
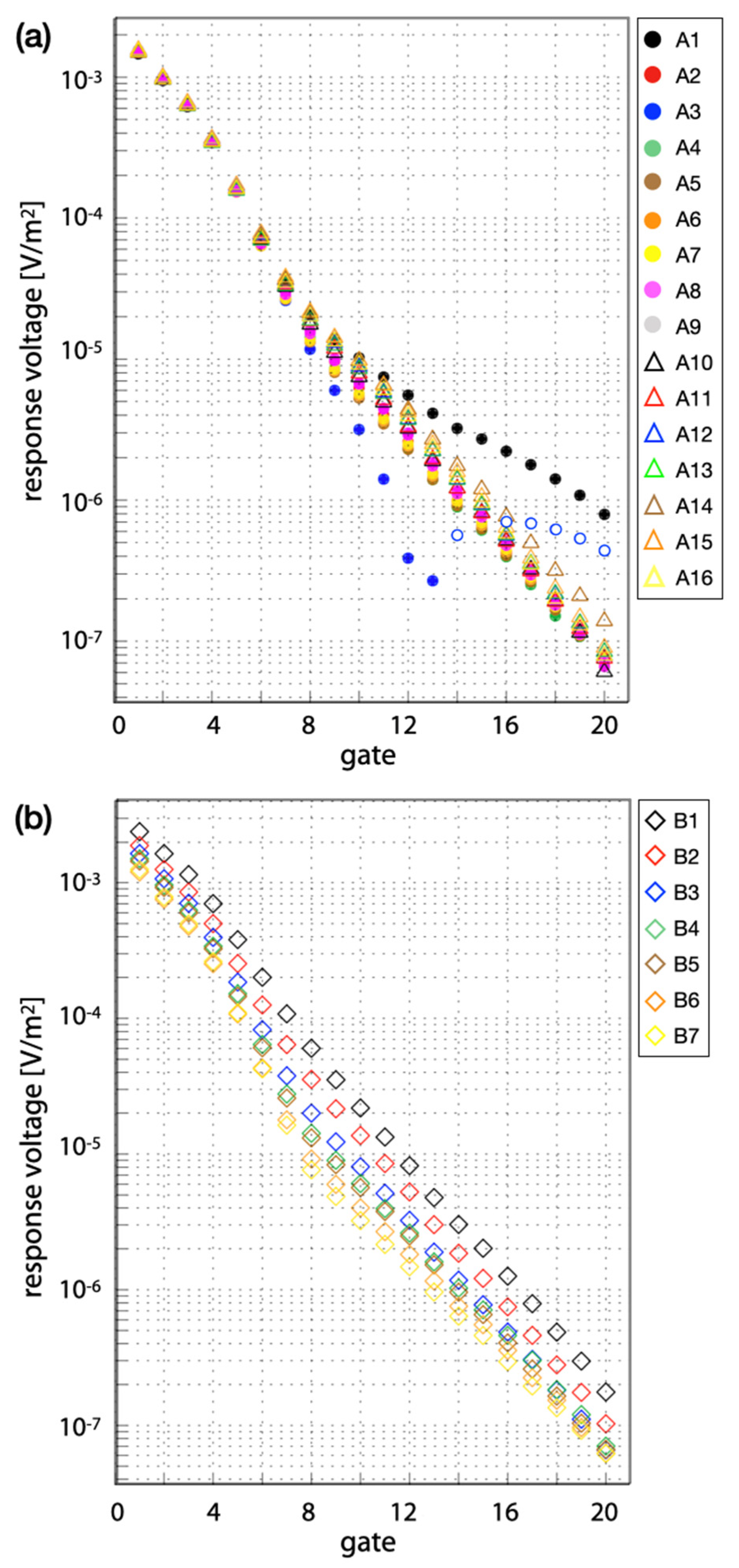
3.2. Data Analysis
3.2.1. D Inversion
3.2.2. D Forward Model Context
3.2.3. D and 3D Forward Model Context
4. Results
4.1. D Scenario
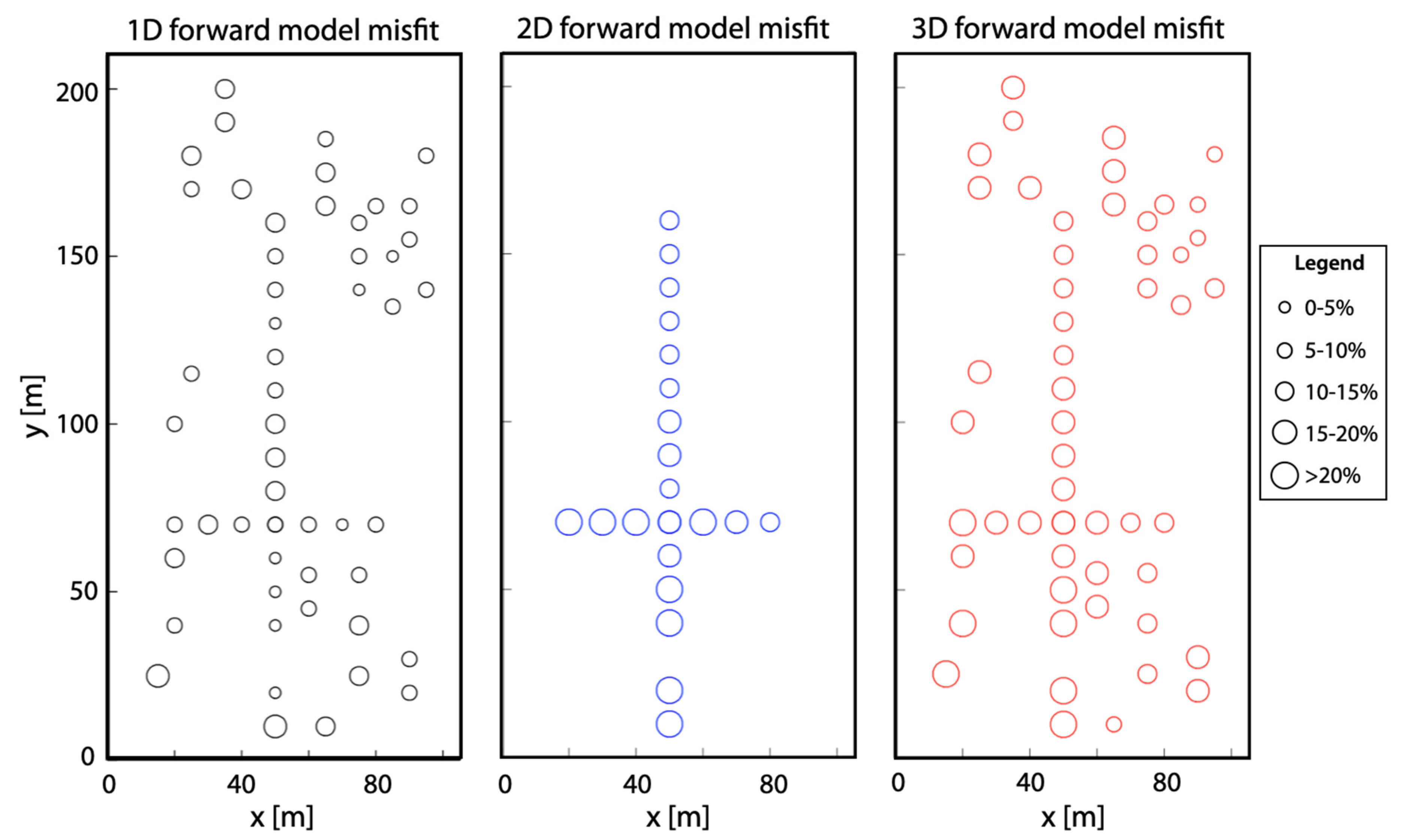
4.2. D and 3D Scenarios
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A. Receiver Gates and Time

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Gate | Time | Gate | Time |
|---|---|---|---|
| (μs) | (μs) | ||
| 1 | 6.813 | 11 | 77.94 |
| 2 | 8.688 | 12 | 99.38 |
| 3 | 11.13 | 13 | 126.7 |
| 4 | 14.19 | 14 | 166.4 |
| 5 | 18.07 | 15 | 206 |
| 6 | 23.06 | 16 | 262.8 |
| 7 | 29.44 | 17 | 355.2 |
| 8 | 37.56 | 18 | 427.7 |
| 9 | 47.94 | 19 | 545.6 |
| 10 | 61.13 | 20 | 695.9 |
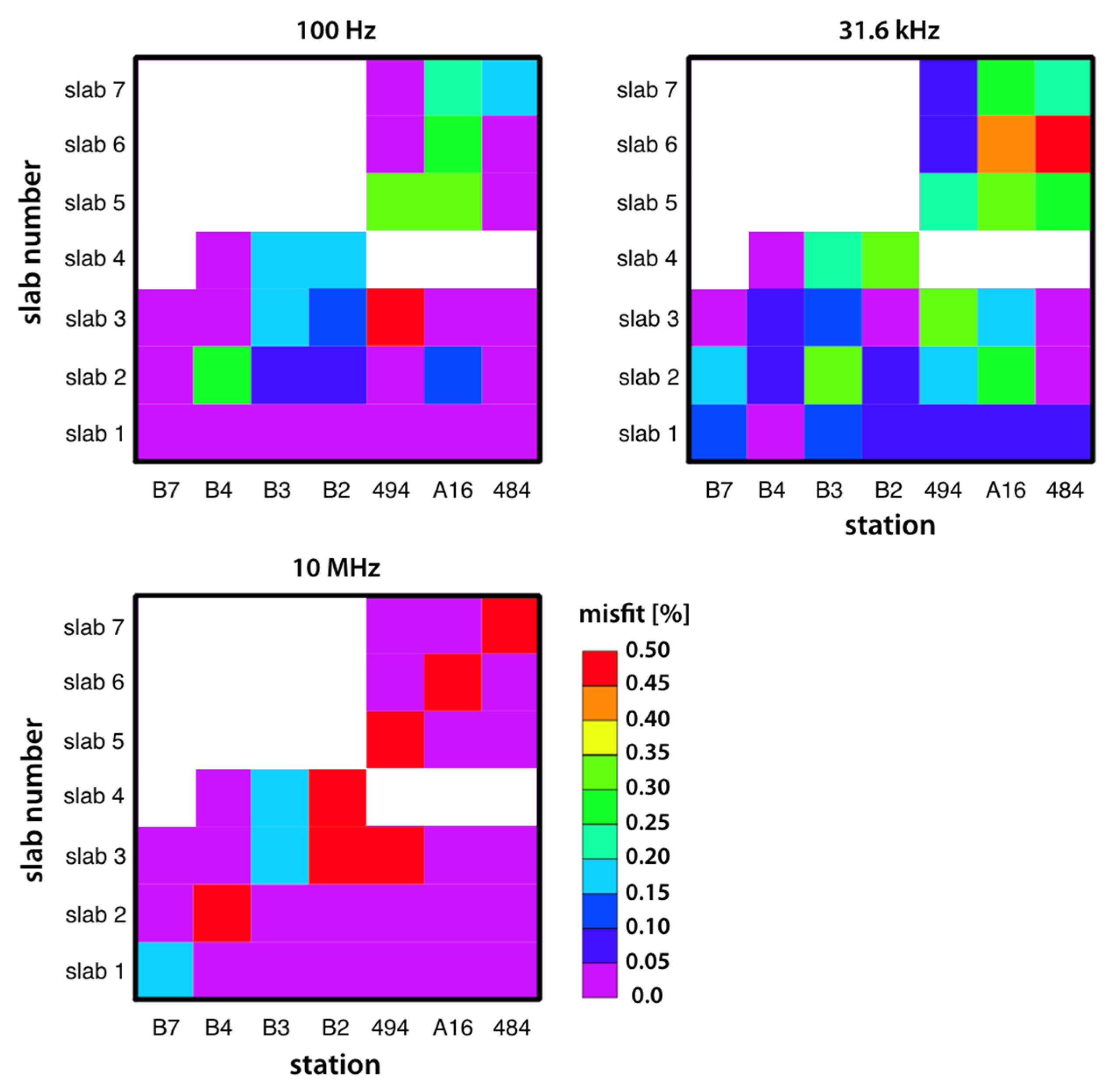
Appendix B. Sensitivity Analysis


References
- Post, V.E.; Groen, J.; Kooi, H.; Person, M.; Ge, S.; Edmunds, W.M. Offshore fresh groundwater reserves as a global phenomenon. Nature 2013, 504, 71–78. [Google Scholar] [CrossRef] [PubMed]
- Jones, E.; Qadir, M.; van Vliet, M.T.H.; Smakhtin, V.; Kang, S.M. The state of desalination and brine production: A global outlook. Sci. Total Environ. 2019, 657, 1343–1356. [Google Scholar] [CrossRef] [PubMed]
- Archie, G.E. Electrical Resistivity Log as an Aid in Determining Some Reservoir Characteristics. Trans. AIME 1942, 146, 54–67. [Google Scholar] [CrossRef]
- Nabighian, M.N.; Macnae, J.C. Time Domain Electromagnetic Prospecting Methods. In Investigations in Geophysics No 3. Electromagnetic Methods in Applied Geophysics; Nabighian, M.N., Ed.; Society of Exploration Geophysicists: Tulsa, OK, USA, 1991; pp. 427–514. [Google Scholar]
- Everett, M.E.; Chave, A.D. On the physical principles underlying electromagnetic induction. Geophysics 2019, 84, w21–w32. [Google Scholar] [CrossRef]
- Everett, M.E. Theoretical Developments in Electromagnetic Induction Geophysics with Selected Applications in the Near Surface. Surv. Geophys. 2012, 33, 29–63. [Google Scholar] [CrossRef]
- Fitterman, D.V. Tools and techniques: Active-source electromagnetic methods. In Resources in the Near-Surface Earth, Treatise on Geophysics; Slater, L., Ed.; Elsevier B. V.: Amsterdam, The Netherlands, 2015; Volume 11, pp. 295–333. [Google Scholar]
- Yogeshwar, P.; Tezkan, B. Two-dimensional basement modeling of central loop transient electromagnetic data from the central Azraq basin area, Jordan. J. Appl. Geophys. 2017, 136, 198–210. [Google Scholar] [CrossRef]
- Fitterman, D.V.; Stewart, M.T. Transient electromagnetic sounding for groundwater. Geophysics 1986, 51, 995–1005. [Google Scholar] [CrossRef]
- Kafri, U.; Goldman, M.; Lang, B. Detection of subsurface brines, freshwater bodies and the interface configuration in-between by the time domain electromagnetic method in the Dead sea rift, Israel. Environ. Geol. 1997, 31, 42–49. [Google Scholar] [CrossRef]
- Danielsen, J.E.; Auken, E.; Jørgensen, F.; Søndergaard, V.; Sørensen, K.I. The application of the transient electromagnetic method in hydrogeophysical surveys. J. Appl. Geophys. 2003, 53, 181–198. [Google Scholar] [CrossRef]
- Siemon, B.; Christiansen, A.V.; Auken, E. A review of heliopter-borne electromagnetic methods for groundwater exploration. Near Surf. Geophys. 2009, 7, 629–646. [Google Scholar] [CrossRef] [Green Version]
- Costabel, S.; Siemon, B.; Houben, G.; Günther, T. Geophysical investigation of a freshwater lens on the island of Langeoog, Germany—Insights from combined HEM, TEM and MRS data. J. Appl. Geophys. 2017, 136, 231–245. [Google Scholar] [CrossRef] [Green Version]
- Kalisperi, D.; Kouli, M.; Vallianatos, F.; Soupios, P.; Kershaw, S.; Lydakis-Simantiris, N. A Transient ElectroMagnetic (TEM) Method Survey in North-Central Coast of Crete, Greece: Evidence of Seawater Intrusion. Geosciences 2018, 8, 107. [Google Scholar] [CrossRef] [Green Version]
- Morgan, L.K.; Werner, A.D.; Patterson, A.E. A conceptual study of offshore fresh groundwater behaviour in the Perth Basin (Australia): Modern salinity trends in a prehistoric context. J. Hydrol. Reg. Stud. 2018, 19, 318–334. [Google Scholar] [CrossRef]
- Yu, X.; Michael, H.A. Offshore Pumping Impacts Onshore Groundwater Resources and Land Subsidence. Geophys. Res. Lett. 2019, 46, 2553–2562. [Google Scholar] [CrossRef]
- Pedley, H.M.; House, M.R.; Waugh, B. The geology of Malta and Gozo. Proc. Geol. Ass. 1976, 87, 325–341. [Google Scholar] [CrossRef]
- Micallef, A.; Foglini, F.; Le Bas, T.; Angeletti, L.; Maselli, V.; Pasuto, A.; Taviani, M. The submerged paleolandscape of the Maltese Islands: Morphology, evolution and relation to Quaternary environmental change. Mar. Geol. 2013, 335, 129–147. [Google Scholar] [CrossRef]
- Directorate, O.E. Geological Map of the Maltese Islands; Office of the Prime Minister: Valletta, Malta, 1993.
- Illies, J.H. Graben formation—The Maltese Islands, a case study. Tectonophysics 1981, 73, 151–168. [Google Scholar] [CrossRef]
- Galdies, C. The Climate of Malta: Statistics, Trends and Analyses 1951–2010; National Statistics Office: Valletta, Malta, 2013.
- FAO. Malta Water Resources Review; FAO: Rome, Italy, 2006; Available online: http://www.fao.org/3/a-a0994e.pdf (accessed on 18 February 2020).
- Stuart, M.E.; Maurice, L.; Heaton, T.H.E.; Sapiano, M.; Micallef Sultana, M.; Gooddy, D.C.; Chilton, P.J. Groundwater residence time and movement in the Maltese islands—A geochemical approach. Appl. Geochem. 2010, 25, 609–620. [Google Scholar] [CrossRef] [Green Version]
- MARSOL. Demonstrating Managed Aquifer Recharge as a Solution to Water Scarcity and Drought Characterisation of the Sea-Level Aquifer System in the Malta South Region; Institution of Applied Geosciences: Darmstadt, Germany, 2016; Available online: http://www.marsol.eu/files/marsol_d10-4_malta-groundwater-model.pdf (accessed on 14 January 2020).
- Bakalowicz, M.; Mangion, J. The limestone aquifers of Malta: Their recharge conditions from isotope and chemical surveys. Hydrology of the Mediterranean and Semiarid Regions (Proceedings of an international symposium held at Montpellier. Int. Assoc. Hydrol. Sci. Publ. 2003, 278, 49–54. [Google Scholar]
- Malta Environment and Planning Authority and the Malta Resources Authority. The Water Catchment Management Plan for the Maltese Islands; Malta Environment and Planning Authority and the Malta Resources Authority: Marsa, Malta, 2011; Available online: https://era.org.mt/en/Documents/1st%20WCMP_final.pdf (accessed on 16 January 2020).
- Mangion, J.; Sapiano, M. The Mean Sea Level Aquifer, Malta and Gozo. In Natural Groundwater Quality; Blackwell Publishing: Ames, IA, USA, 2008; pp. 404–420. [Google Scholar]
- BRGM. Study of the Fresh Water Resources of Malta; Appendix 7: Water Quality and Environmental Aspects, R 33691 EAU 4S 91; BRGM: Orleans, France, 1991. [Google Scholar]
- Malta Environment and Planning Authority. Minerals Subject Plan for the Maltese Islands 2002; Entec UK Ltd.: London, UK, 2003. [Google Scholar]
- Spies, B.R. Depth of investigation in electromagnetic sounding methods. Geophysics 1989, 54, 872–888. [Google Scholar] [CrossRef]
- Constable, S.C.; Parker, R.L.; Constable, C.G. Occam’s inversion: A practical algorithm for generating smooth models from electromagnetic sounding data. Geophysics 1987, 52, 289–300. [Google Scholar] [CrossRef]
- Ward, S.H.; Hohmann, G.W. Electromagnetic Theory for Geophysical Applications, in Electromagnetic Methods in Applied Geophysics Theory. Soc. Explor. Geophys. 1988, 1, 131–311. [Google Scholar]
- Everett, M.E. Near-Surface Applied Geophysics; Cambridge University Press: Cambridge, UK, 2013. [Google Scholar]
- Chave, A.D. Numerical integration of related Hankel transforms by quadrature and continued fraction expansion. Geophysics 1983, 48, 1671–1686. [Google Scholar] [CrossRef] [Green Version]
- Badea, E.A.; Everett, M.E.; Newman, G.A.; Biro, O. Finite-element analysis of controlled-source electromagnetic induction using Coulomb-gauged potentials. Geophysics 2001, 66, 786–799. [Google Scholar] [CrossRef]
- Stalnaker, J.L.; Everett, M.E.; Benavides, A.; Pierce, C.J. Mutual induction and the effect of host conductivity on the EM induction response of buried plate targets using 3-D finite-element analysis. IEEE Trans. Geosci. Remote Sens. 2006, 44, 251–259. [Google Scholar] [CrossRef]
- MARSOL. Demonstrating Managed Aquifer Recharge as a Solution to Water Scarcity and Drought Characterisation of the Sea-Level Aquifer System in the Malta South Region; Institution of Applied Geosciences: Darmstadt, Germany, 2015; Available online: http://www.marsol.eu/files/marsol_d10-1_msla-characterisation.pdf (accessed on 11 January 2020).
- Fofonoff, N.P.; Millard, J.R.C. Algorithms for the computation of fundamental properties of seawater. In UNESCO Technical Papers in Marine Sciences; UNESCO: Paris, France, 1983; Volume 44. [Google Scholar]
- Enzo Rizzo. Personal communication. Available online: https://hyfrew.wordpress.com/ (accessed on 1 May 2020).
- Geonics. G-TEM Operating Manual; Geonics Limited: Mississauga, ON, Canada, 2016. [Google Scholar]














© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pondthai, P.; Everett, M.E.; Micallef, A.; Weymer, B.A.; Faghih, Z.; Haroon, A.; Jegen, M. 3D Characterization of a Coastal Freshwater Aquifer in SE Malta (Mediterranean Sea) by Time-Domain Electromagnetics. Water 2020, 12, 1566. https://doi.org/10.3390/w12061566
Pondthai P, Everett ME, Micallef A, Weymer BA, Faghih Z, Haroon A, Jegen M. 3D Characterization of a Coastal Freshwater Aquifer in SE Malta (Mediterranean Sea) by Time-Domain Electromagnetics. Water. 2020; 12(6):1566. https://doi.org/10.3390/w12061566
Chicago/Turabian StylePondthai, Potpreecha, Mark E. Everett, Aaron Micallef, Bradley A. Weymer, Zahra Faghih, Amir Haroon, and Marion Jegen. 2020. "3D Characterization of a Coastal Freshwater Aquifer in SE Malta (Mediterranean Sea) by Time-Domain Electromagnetics" Water 12, no. 6: 1566. https://doi.org/10.3390/w12061566