3.1. Time-Averaged Velocity Fields
The time-averaged characteristics of the velocity information are analyzed under the ballast condition in this section. The time-averaged velocity component
ui can be defined as:
, where the index
i = 1, 2, 3 indicates the velocity components
u,
v, and
w in the
x,
y and
z direction, respectively. The time-averaged and towing speed of the ship model
U are dealt with a dimensionless method. The y-axes and z-axes are normalized as Y/R and Z/R. The dimensionless axial flow velocity
u/U, the cross-flow vector, cross-flow velocity
S/U, and the streamline in the propeller region under the ballast and design conditions shown in
Figure 3 and
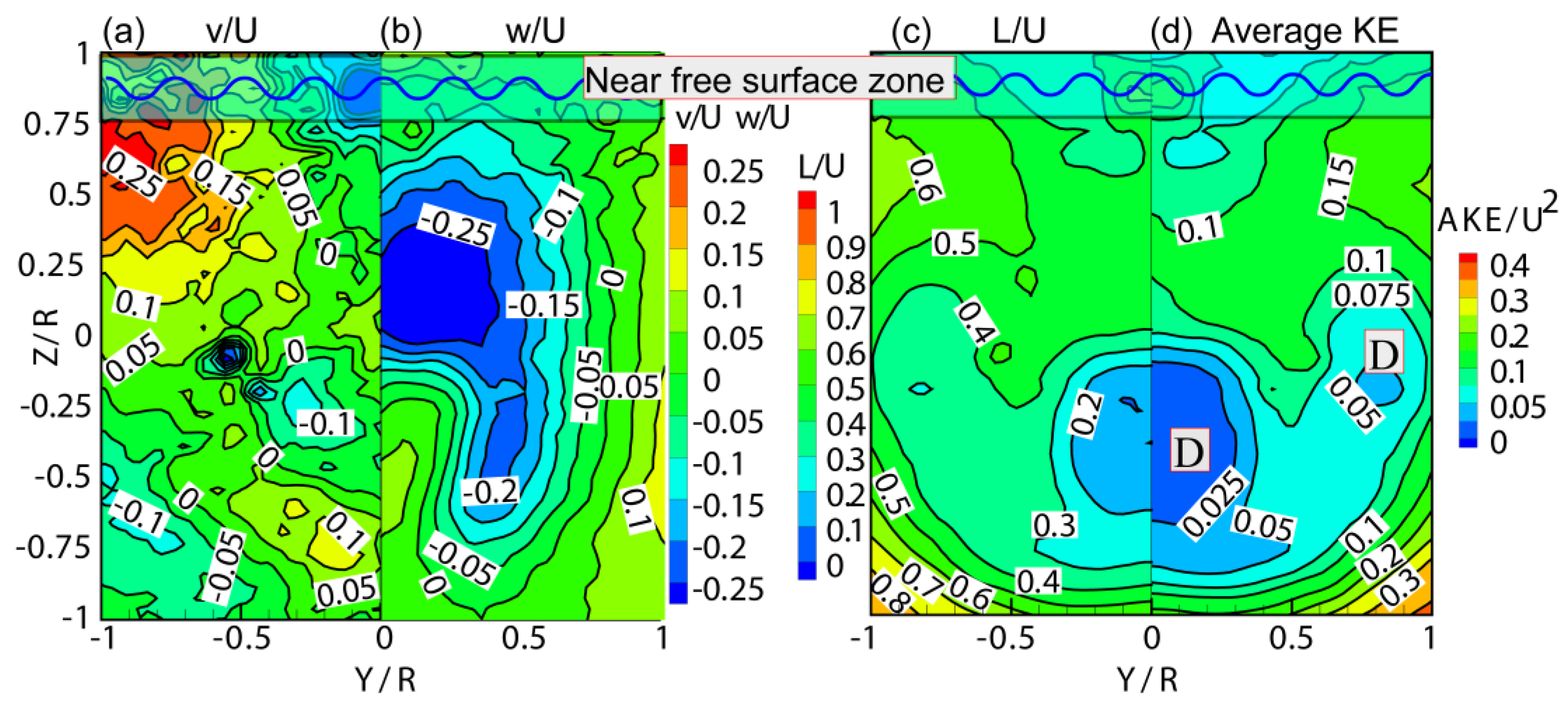
Figure 4a–d illustrates the results of the following parameters: the dimensionless transverse velocity
v/U, vertical velocity
w/U, whole-flow velocity
L/U; and average kinetic energy
AKE/U2. The whole-flow velocity
L ((
u2 +
v2 +
w2)
1/2) and the cross-flow velocity
S ((
v2 +
w2)
1/2) conduct dimensionless processing with the towing speed of the ship model
U. The average kinetic energy (
AKE = 1/2(
u2 +
v2 +
w2)) conducts dimensionless processing with the square of the towing speed
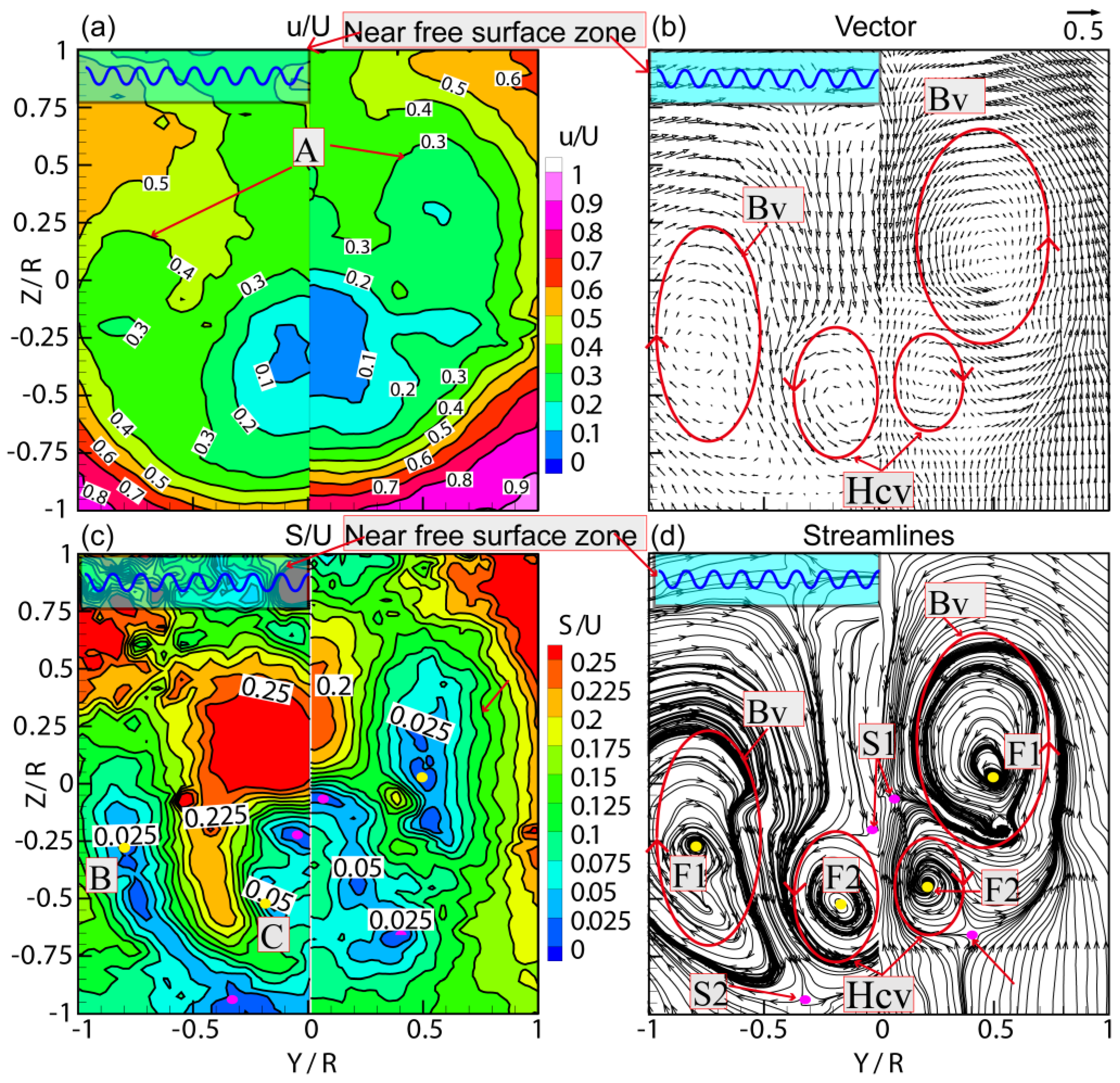
U2. Under the ballast condition, the ship is a little trim by the stern and the draft is smaller than the design condition. Influenced by the change of the loading condition, the characteristics of the hook-like velocity contour can be found in
Figure 3a, the distinct hook-like contours (labelled A) appear at the position of
u/U = 0.4 (
u/U = 0.3 under the design condition) [
2], and the vertex of the hook-like contour is at the position of Z/R = 0.6 and Z/R = 0.25 under the design and ballast condition, respectively. The definition of hook-like characteristic, which was first proposed by Kim [
6], is caused by flows with less average kinetic energy (
Figure 4d, labeled D) being transferred through an intense longitudinal bilge vortex towards the center of the hull, which reduces its velocity and creates local hook-like structures. The bilge vortices formed by the flow passing through the stern of the U-shaped ship move down, which is almost in parallel with the hub cap vortices. The position of the hub cap vortex changes a little; however, the rotating range is larger than the design condition. The cross-flow vector and streamline clearly capture and illustrate the characteristics of the bilge vortex and the hub cap vortex.
Figure 3c shows the contours of
S/U. The bilge vortex foci (labelled F1) are at
Y/R = ±0.5, Z/R = 0.05, and the hub cap vortex foci (labelled F2) are at Y/R = ±0.215, Z/R = −0.425 under the design condition. The bilge vortex foci (labelled F1) are at
Y/R = ±0.75, Z/R = −0.25, and the hub cap vortex foci (labelled F2) are Y/R = ±0.215, Z/R = −0.55 under the ballast condition.
As the streamline shown in
Figure 3d, on the starboard side of the ship, the bilge vortex flows counter-clockwise and the hub cap vortex flows clockwise. On the port side of the ship, the bilge vortex flows clockwise and the hub cap vortex flows counter-clockwise. The shape of the bilge vortex is "round" under the design condition. Under the ballast condition, the bilge vortex is in the shape of "ears", and the range of the hub cap vortex is larger than that under the design condition. In addition, the vortex foci of the twin vortex structure and the two saddle points of the propeller disk (labelled S1 and S2) are captured. The saddle point S1 is the intersection point of the upwash flow shear layer and the downwash flow shear layer. This is the point where the cross-section velocity
S/U = 0 (S1 at Y/R = ±0.1, Z/R =−0.05, and Y/R = ±0.05, Z/R = −0.25 for the design and ballast condition, respectively). The saddle point S2 is the point where the left-wash flow and the right-wash flow separated from the up/down-wash flow shear layer and this is the point where the cross-section velocity
S/U = 0 (S2 at Y/R = ±0.4, Z/R = −0.65, and Y/R = ±0.35, Z/R = −0.95 for the design and ballast condition, respectively).
It can be seen in
Figure 4a,b that the positive and negative velocities represent the rotation direction of the bilge vortex and the hub cap vortex. This is because the ship is under the ballast condition and the top of the propeller disk area is near the free surface. The propeller disk area produces the near free surface layer disturbed by the free surface waveform. The dimensionless transverse velocity
v/U and the dimensionless vertical velocity
w/U are smaller than the dimensionless axial velocity
u/U. These are greatly affected by the free surface disturbance. Therefore, the distribution of the dimensionless transverse velocity
v/U and the dimensionless vertical velocity
w/U in the near free surface layer is chaotic.
Figure 4c,d shows that the hook-like region of the wake field in the propeller disk area has lower average kinetic energy (AKE) (labelled D in
Figure 4d) characteristics due to the influence of the bilge vortex and the hub cap vortex.
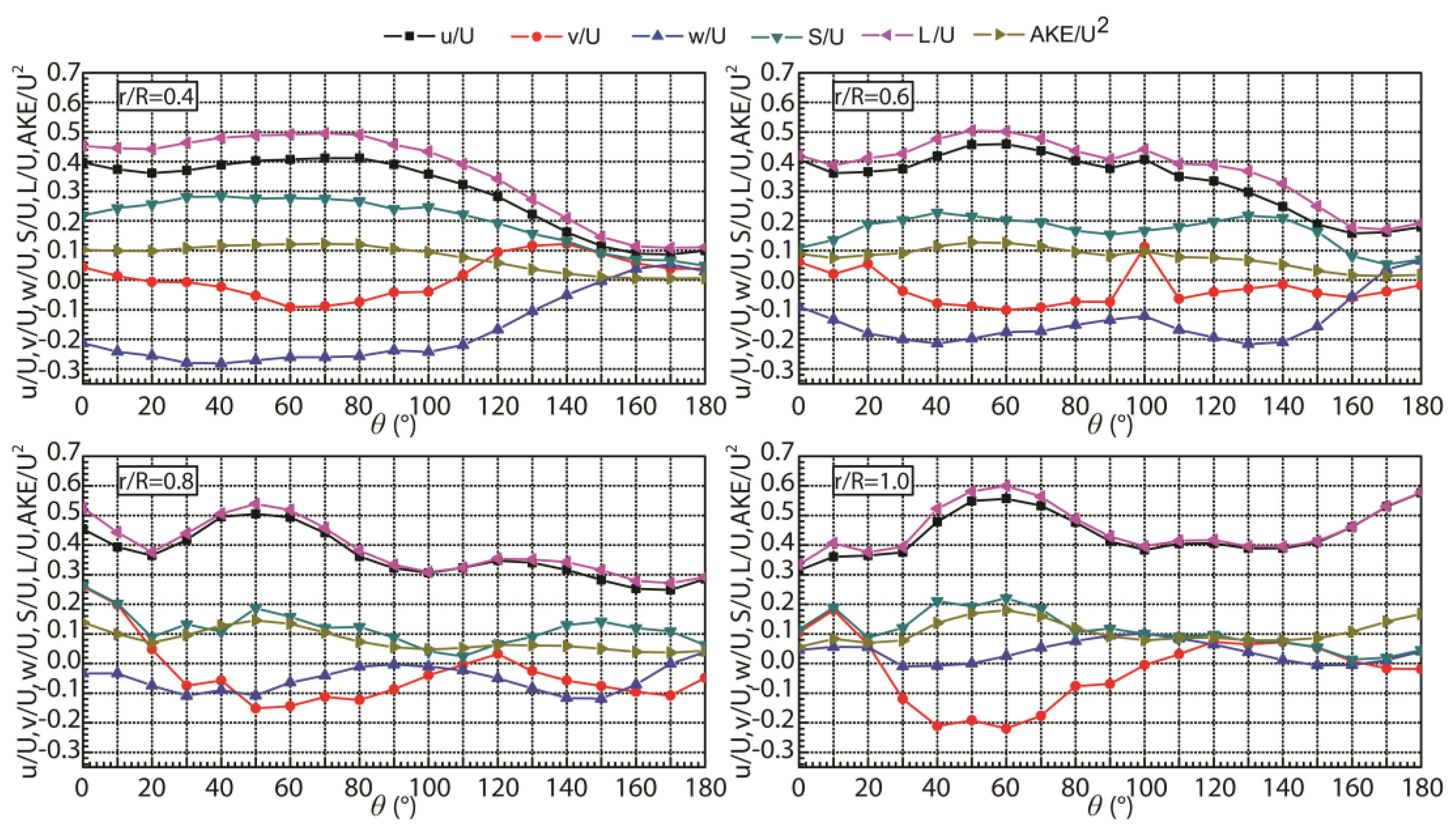
3.3. Time-Averaged Velocity at Each Radius
In this section, the velocity and the
AKE/U2 profiles with several radii (r/R = 0.4, 0.6, 0.8, 1.0) under the ballast condition are illustrated.
Figure 6 shows the velocities
u/U,
v/U,
w/U,
S/U,
L/U, and
AKE/U2. The circumferential angle θ runs clockwise from 0° (top) to 180°. When r/R = 0.4 and 0.6, as shown in
Figure 6, the positive and negative values of the time-averaged velocity
v/U and
w/U represent the direction of these parameters. The time-averaged velocity
u/U, S/U, L/U, and
AKE/U2 are basically positive and decrease with respect to θ, which is the same with that under the design condition. For r/R = 0.6, the cross-section velocity
S/U has some slight fluctuations. The dimensionless transverse velocity
v/U and
w/U are basically negative. The "absolute" values of
v/U and
w/U with respect to the circumferential angle θ first increase and then decrease. At r/R = 0.8, the distributions of
u/U, S/U, L/U, and
AKE/U2 with respect to θ show a decreasing trend followed by an increasing and decreasing trend. The "absolute" values of
v/U and
w/U with respect to the circumferential angle θ first increases and then it decreases with a relatively irregular change. However, the trend of
S/U and
AKE/U2 are not significant and are relatively stable. When r/R = 1.0,
u/U, S/U, L/U, and
AKE/U2 are increasing except for θ = 0–30° and 160–180° with a slight fluctuation (
u/U, L/U). The dimensionless transverse velocity
v/U exhibits strong fluctuations. The dimensionless vertical velocity
w/U has a relatively stable distribution.
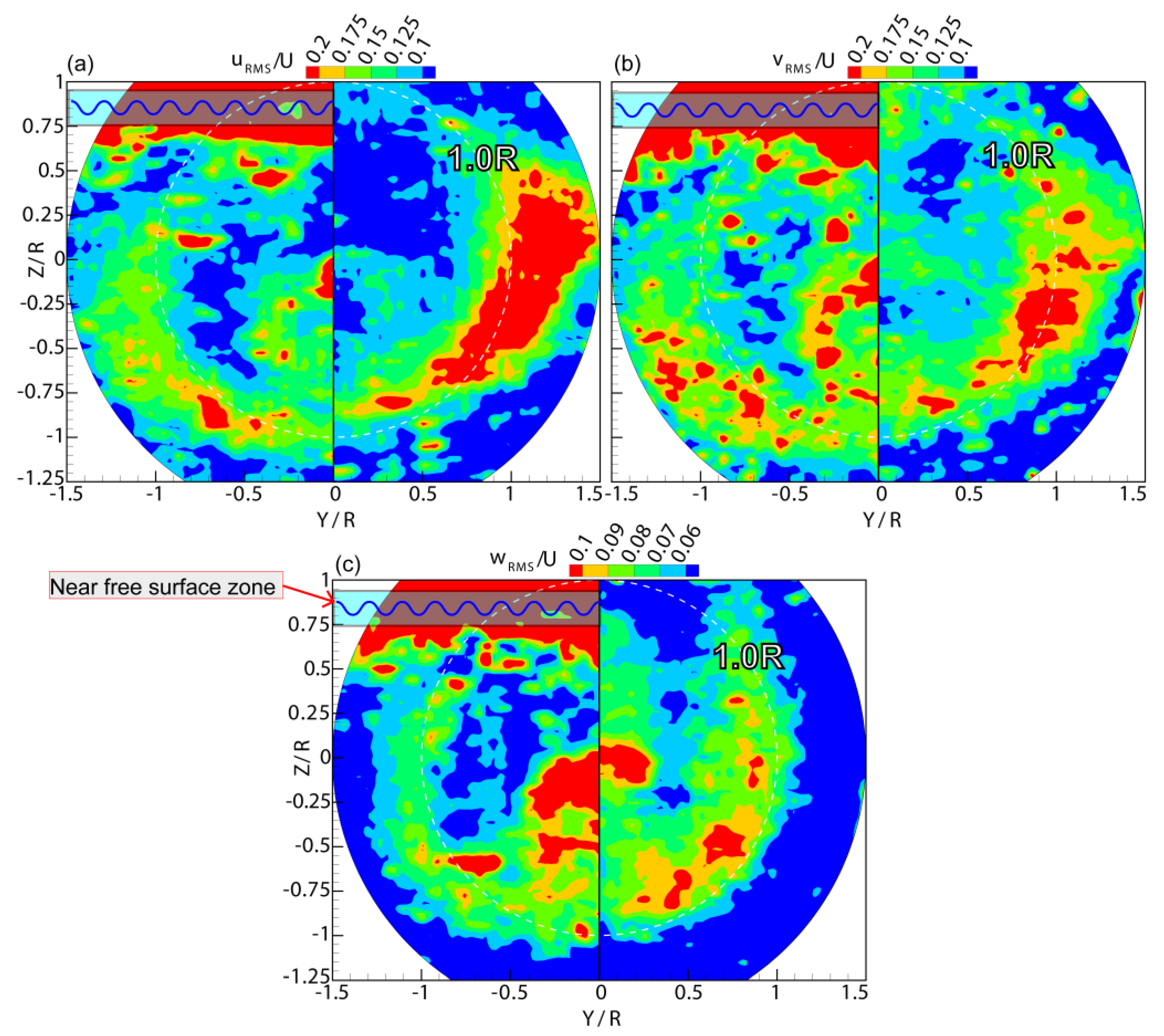
3.4. Velocity Fluctuations
The turbulence characteristic of the flow fields is expressed as the root mean square velocity fields, which can be computed as:
.
Figure 7 shows the root mean square velocity fields under the ballast and design conditions. The root mean square velocity is dealt with a dimensionless method.
Figure 7a–c displays the results of the dimensionless axial root mean square velocity
uRMS/U, the dimensionless transverse root mean square velocity
vRMS/U, and the dimensionless vertical root mean square velocity
wRMS/U, respectively. The white dotted line is the position where r/R = 1.0 and the light blue wavy line is near the free surface zone under the ballast condition. As depicted in
Figure 7, the distribution of the root mean square velocity in the three directions is similar under the ballast and design conditions, which is either hook-shaped or U-shaped. Compared with that under the design condition, the areas with a strong fluctuation are mainly distributed at the end of the shaft, the range of r/R = 0.9–1.5, and the end of the hub cap. In addition, the top edge of the propeller is tangent to the free surface under the ballast condition, and a strong root mean square velocity fluctuation region is formed near the free surface.
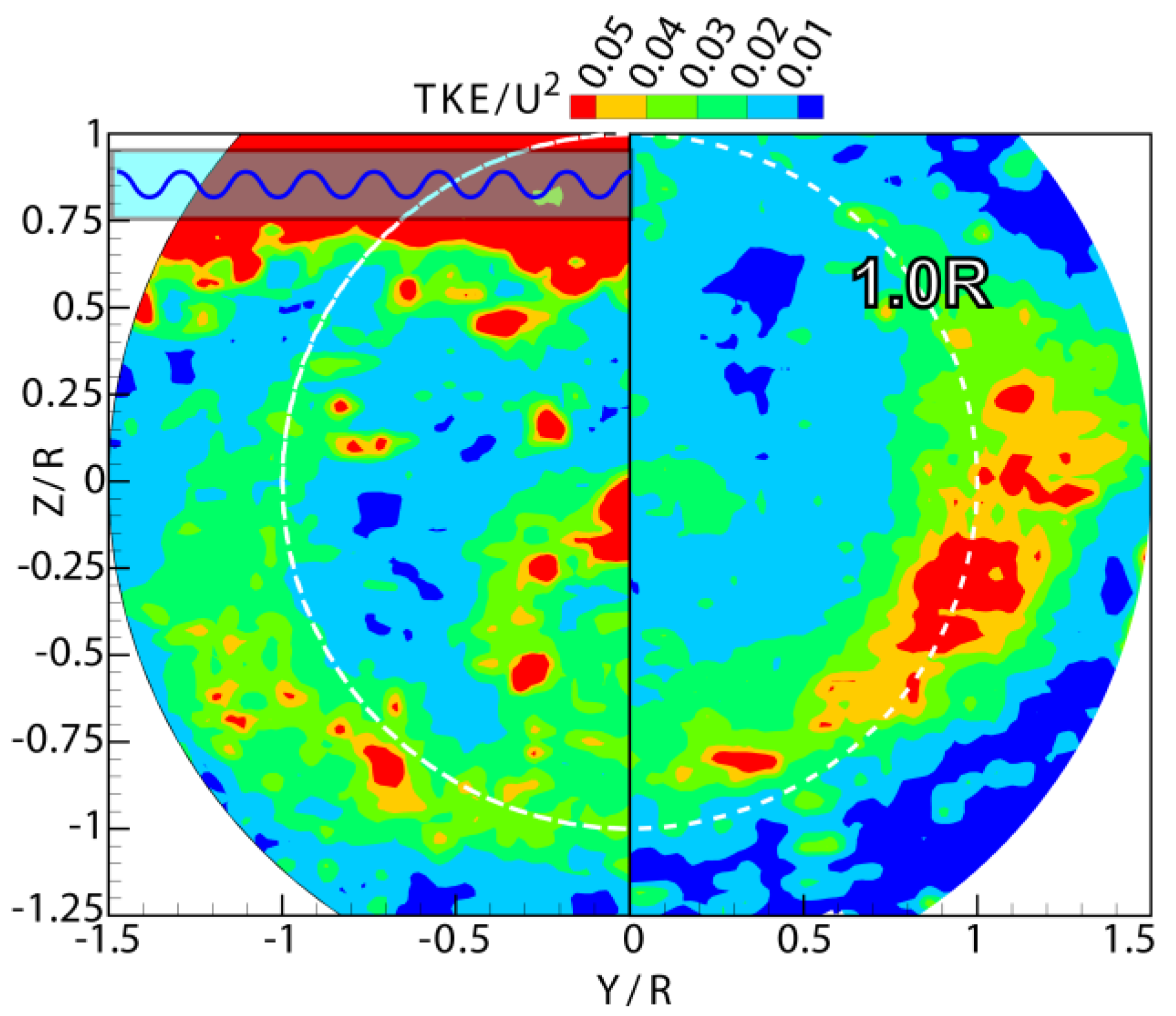
Figure 8 presents the TKE in the propeller region under the ballast and design conditions,
Figure 9 presents the Reynolds stresses in the propeller region under the ballast condition. The Reynolds stresses tensor and TKE can be defined as:
and
, respectively, where
i,
j = 1, 2, 3 indicate the velocity fluctuations
,
, and
in the x, y and z direction, respectively,
ui,n or
uj, n represents the
n-th instantaneous velocity data. The TKE and the Reynolds stresses are dealt with the dimensionless method.
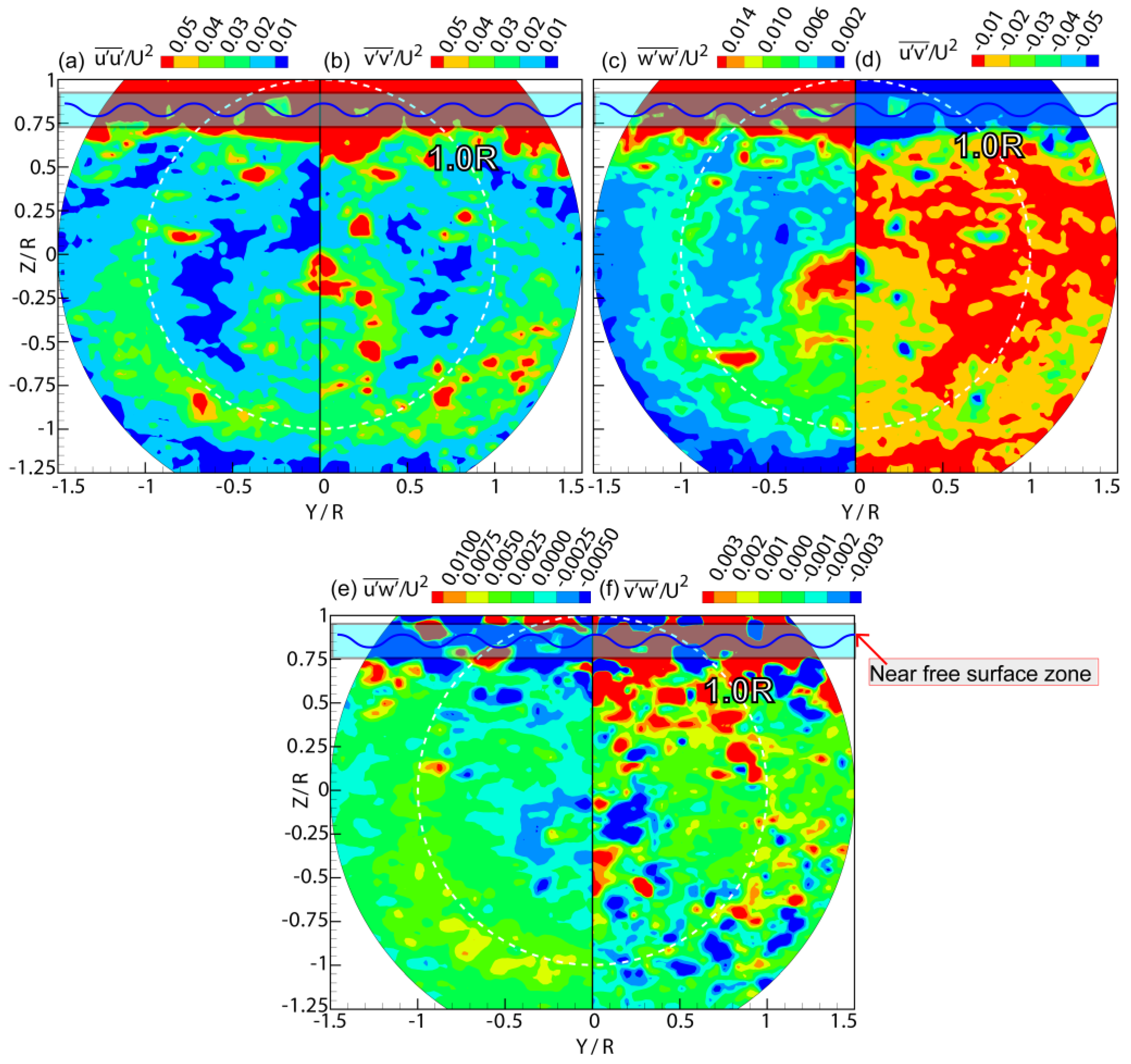
Figure 9a–c displays the dimensionless Reynolds normal stress
,
, and
, respectively.
Figure 9d–f depicts the dimensionless shear stress
,
, and
, respectively, and the white dotted line shows the position of r/R = 1.0.
As demonstrated in
Figure 8, the distribution of the TKE is also U-shaped; however, the interval is wider and the U-shaped distribution is concentrated in the kinetic energy change layer, which is the transition from low kinetic energy to high kinetic energy. Compared with that under the design condition, the changing layer with strong gradient of the turbulent kinetic energy under the ballast condition is outward-transferring to 0.9R. Due to the influence of the loading condition, the shaft is no longer in the hydrodynamic downstream state under the ballast condition. Therefore, the TKE at the end of the shaft in the non-downstream state has a large amplitude. As demonstrated in
Figure 9, the axial Reynolds normal stress
, the transverse Reynolds normal stress
, and the vertical Reynolds normal stress
have the characteristic of anisotropy. The influence of the shallow draft at the stern under the ballast condition makes the propeller disk area have a turbulent area of about 0.25R near the free surface. Due to the influence of the rooster tail near the free surface, the TKE and the Reynolds stress in the turbulent region have a large amplitude. The maximum value of the axial Reynolds normal stress
≈ 0.07
U, the transverse Reynolds normal stress
≈ 0.05
U, and the vertical Reynolds normal stress
≈ 0.016
U in the non-interference region. The contours of the TKE are similar with the axial Reynolds normal stress
. The maximum TKE occurs in the high shear zone and the velocity gradient of the axial velocity component is large. This is because the axial Reynolds normal stress is much larger than the maximum of the transverse and vertical Reynolds normal stress.
The distribution of the Reynolds shear stress , , and is similar to the Reynolds normal stress and the TKE, which is U-shaped, except that the U-shape distribution of is not obvious. The propeller disk is also affected by the U-shaped stern and it has a U-shaped shear layer. However, due to the influence of the draft under the ballast condition, the underwater shape of the U-shaped stern is different from that under the design condition; thus, resulting in a different U-shaped shear layer. The shear layer under the ballast condition covers the bilge vortex and hub cap vortex in a wider range. The Reynolds shear stress is negative, where ∂u/∂Y is decreasing and it has a maximum value of ≈ −0.05U. The Reynolds shear stress has similar behavior; however, it is correlated with ∂u/∂Z and it attains a maximum of ≈ 0.01U. The vertical Reynolds shear stress represents the turbulent shear characteristics of the y-z section of the propeller disk. Compared with that under the design condition, the U-shaped shear layer in the outer region of the two vortices is slightly weaker than that under the design condition. In addition, the turbulent region near the free surface also has a great influence on the Reynolds shear stress in the range of Z/R = 0.75–1.0R.
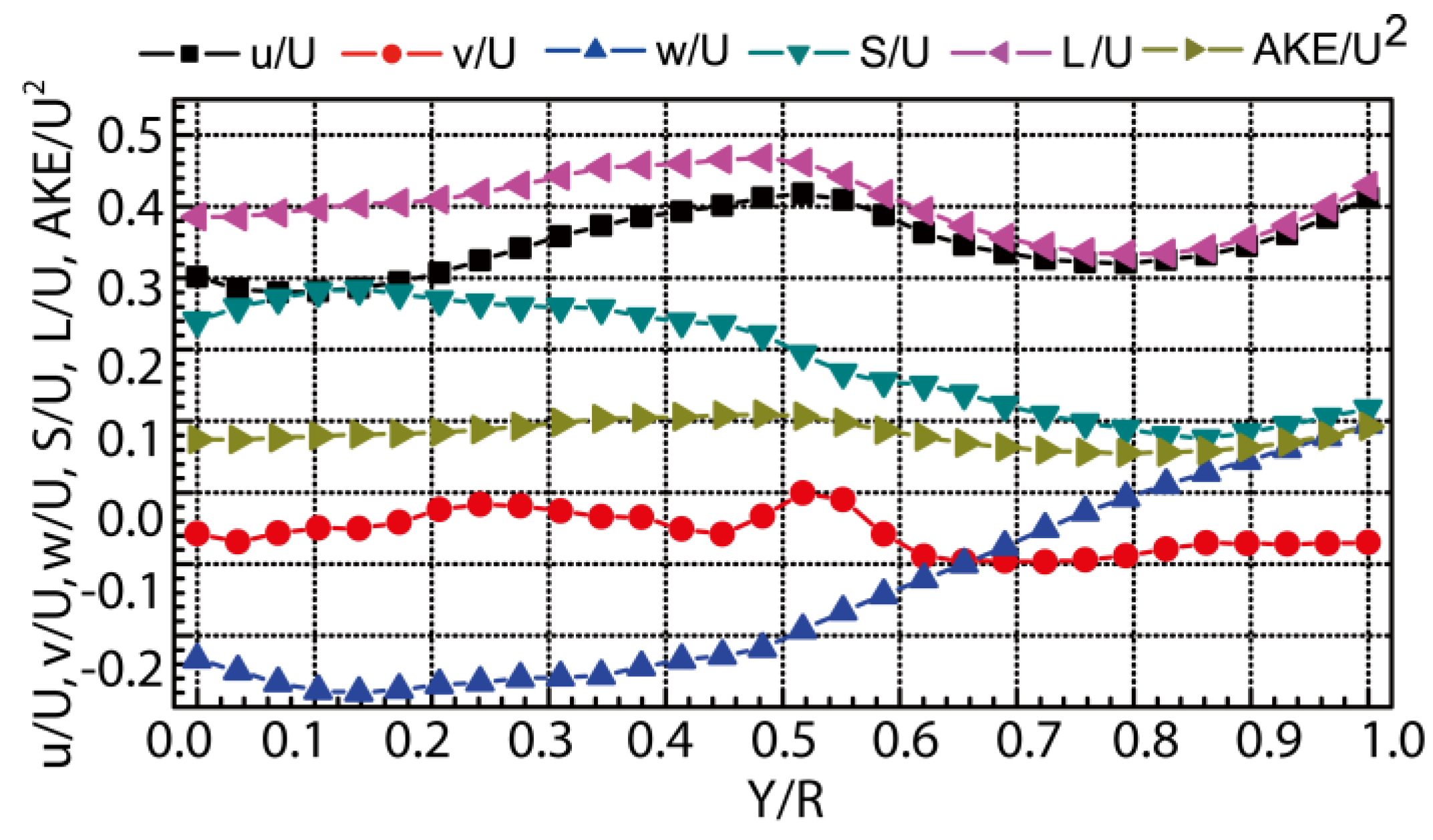
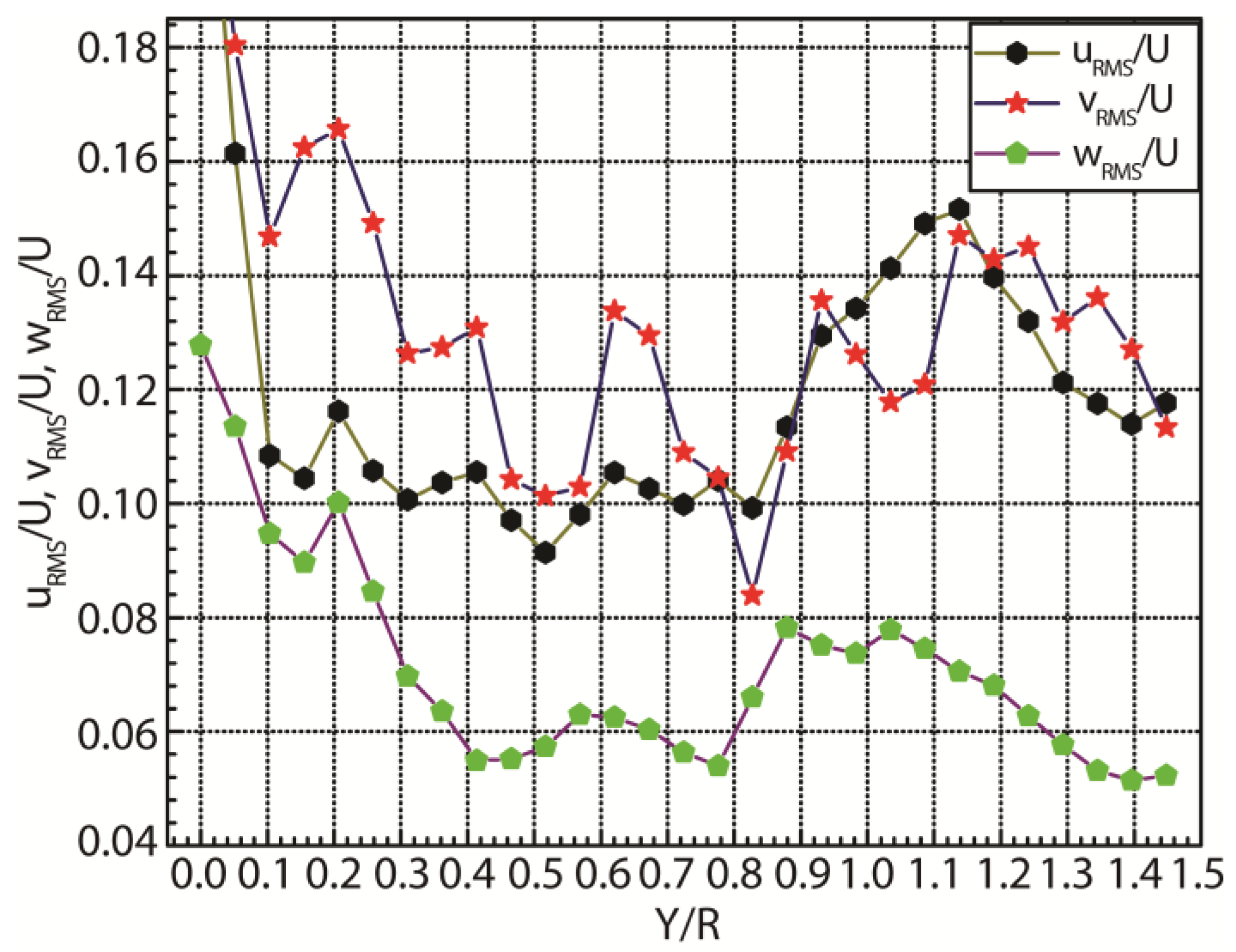
Figure 10 depicts the root mean square velocity profiles at Z/R = 0.00 under the ballast condition, which is a quantitative expression of the distribution of the turbulent fluctuating velocity field. The results show that the dimensionless turbulent fluctuating velocity first decreases, then it increases, and it finally decreases from Y/R = 0 to Y/R = 1.
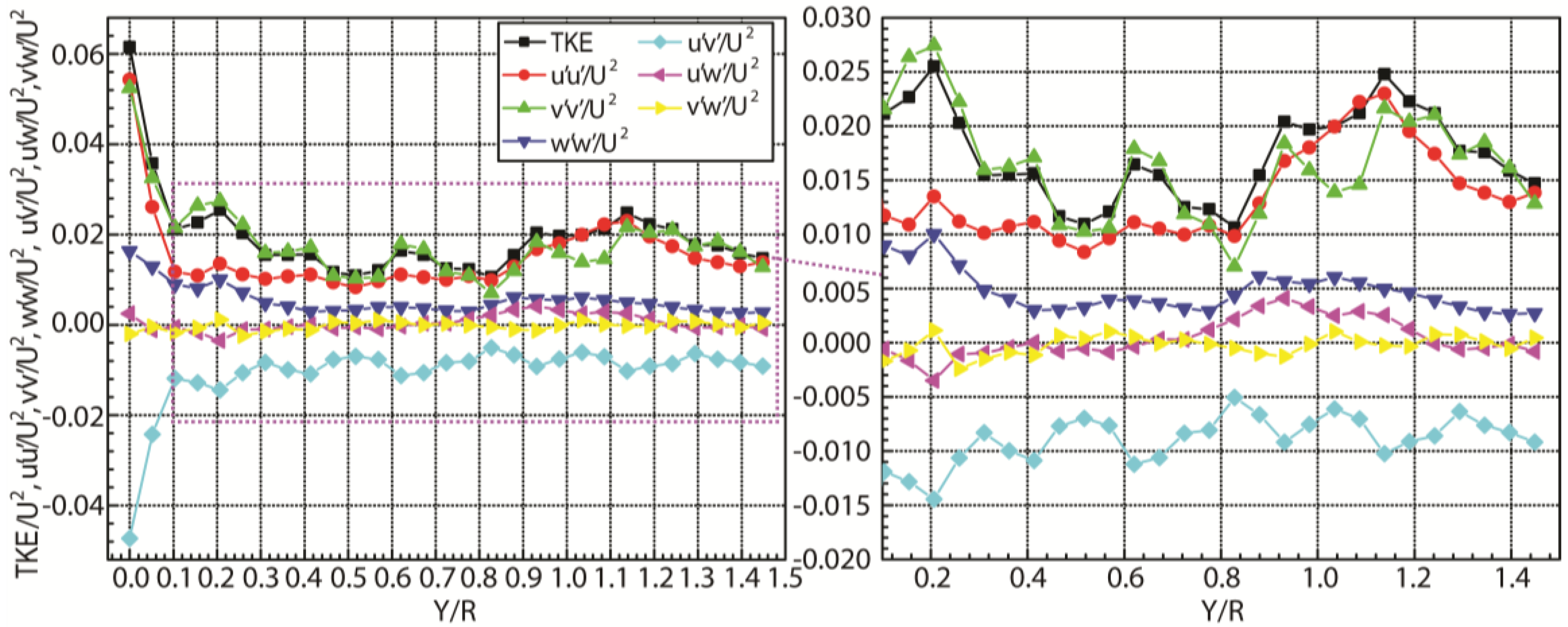
Figure 11 displays the turbulence statistics at Z/R = 0.00 under the ballast condition. The dimensionless Reynolds normal stress
,
,
, and
TKE/U2 show an overall decreasing distribution from Y/R = 0 to Y/R = 1. The dimensionless Reynolds shear stress
is increasing. The dimensionless Reynolds shear stress
and
show a relatively flat trend of change. As illustrated in
Figure 11 on the right for the close up of the turbulence statistics profiles, the dimensionless Reynolds normal stress
,
,
TKE/U2, and the Reynolds shear stress
have been acutely fluctuating.
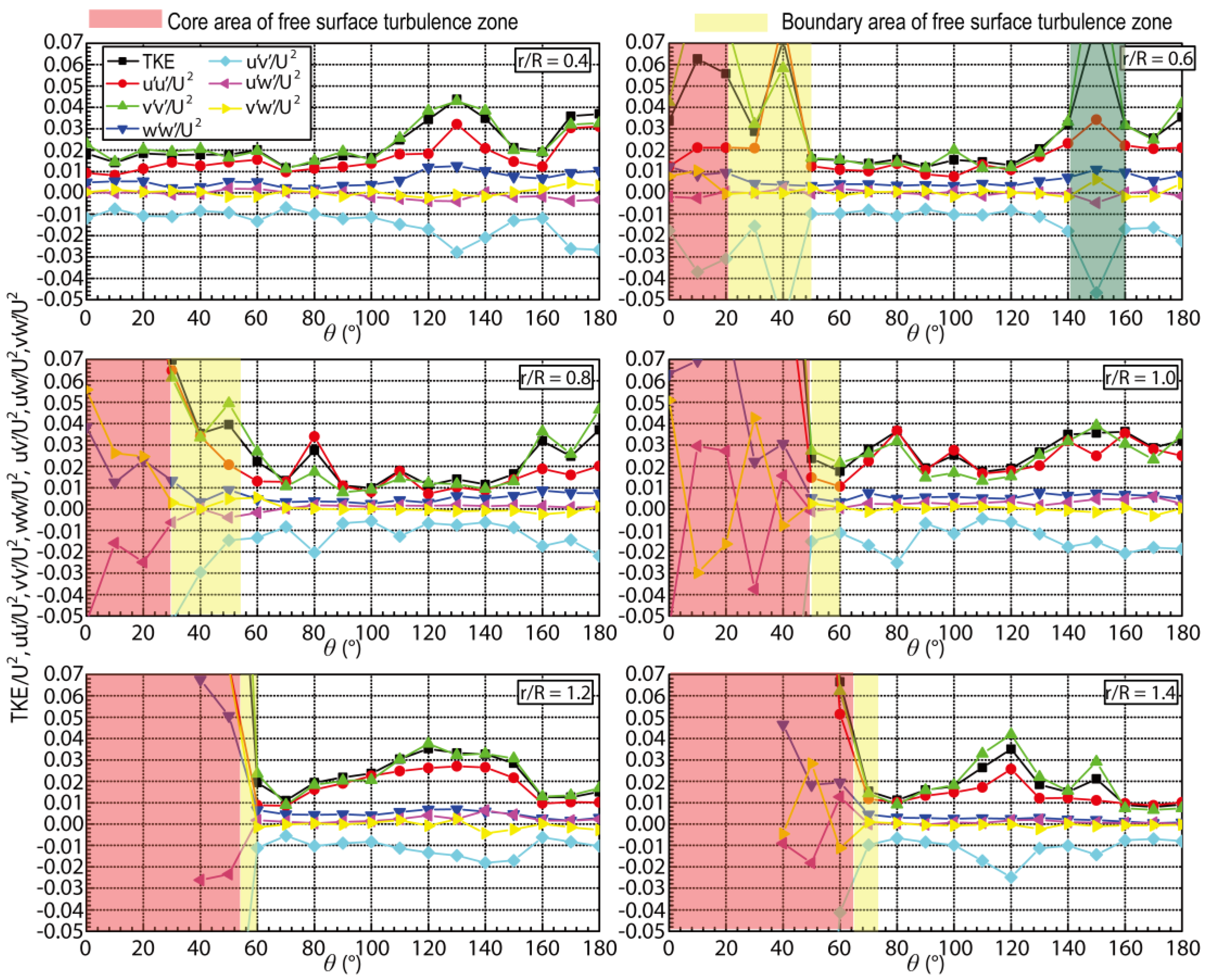
Figure 12 presents the turbulence statistics profiles at different radius in the propeller region under the ballast condition and the interval is 10°. Among them, the 0° circumferential angle is directly above the propeller disk surface and the circumferential angle gradually increases clockwise to 180°. The red area is near the free surface wave core turbulent area, the yellow area is the boundary area affected by the core area, and the green frame is the local high-turbulence area in the propeller disk.
In the circumferential distribution area with a radius
r/
R = 0.4, the TKE and Reynolds stress at the end of the shaft show a relatively stable distribution trend with increasing circumferential angle, and the peak distribution appears in the corresponding area at the end of the shaft. In the region with
r/
R = 0.6–0.8, which is located in the low-kinetic-energy region, the TKE and Reynolds stress are relatively stable as the circumferential angle increases. In the circumferential distribution area with
r/
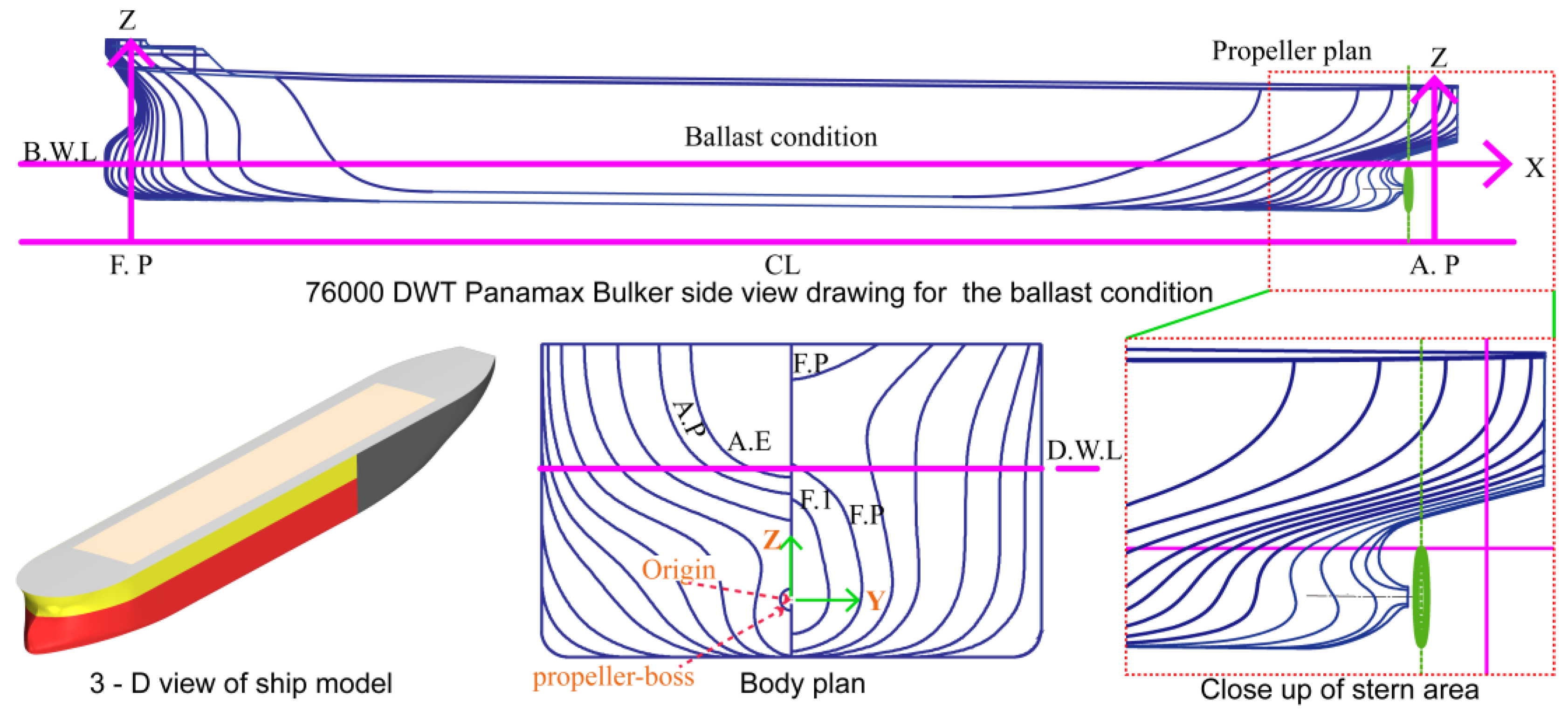
R = 1.0–1.4, the curves of the points taken from the circumferential distribution are in the average kinetic energy change layer region. With the increase in the circumferential angle, the dimensionless TKE and the Reynolds normal stress present a relatively violent fluctuation distribution as a whole. In addition, the near free surface wave core turbulent region in red and the boundary region affected by the yellow core have a large amplitude and a violent fluctuation. The shape of the stern has typical longitudinal curvature and cross-sectional curvature (see
Figure 1). The anisotropic turbulent flow of the wake has a strong correlation with the longitudinal curvature and cross-sectional curvature of the stern as well as the flow gathering and dispersion around the stern. The local geometry in the stern region of the ship is different at different span wise and circumferential angle positions, and thus the average velocity and turbulence characteristic are different at various span wise and circumferential angle positions.
Figure 6,
Figure 10,
Figure 11 and
Figure 12 in the article illustrate the average velocity and turbulence characteristic parameters at different span and circumferential angle positions. The trend is closely related to the flow nature, and it should be pointed out that it also includes measurement uncertainty factors. But the main factor is the flow factor, and uncertainty has little effect on the overall distribution characteristics and distribution trends.
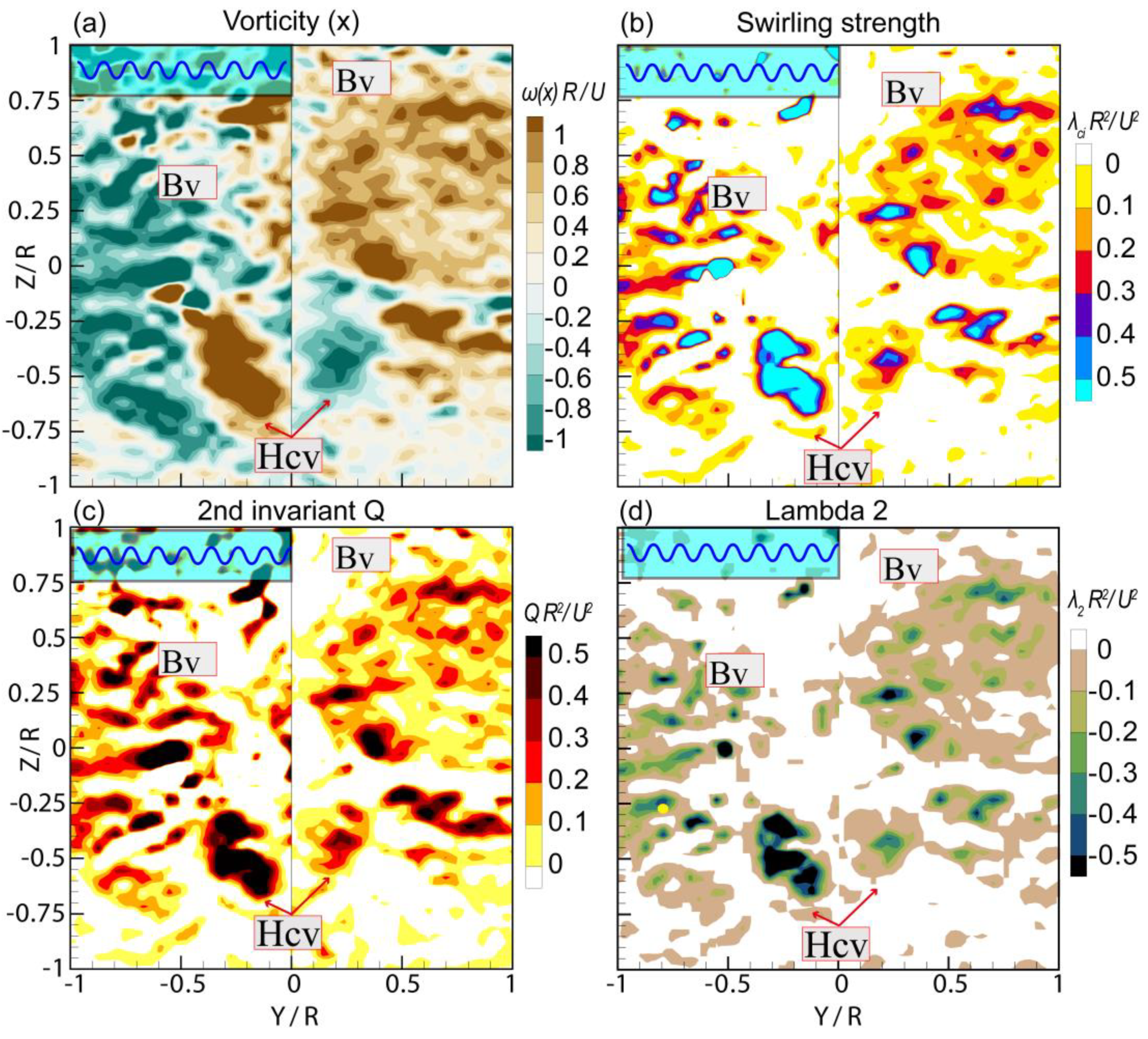
3.5. Vorticity Information
Figure 13 shows the vorticity information under the ballast and design conditions.
Figure 13a shows the contour maps of the vorticity (x) which can be computed as:
, and the positive value of the vorticity (x) indicates that the rotation direction of the vortex is counter clockwise and the negative value is clockwise.
Figure 13b shows the contour maps of the swirling strength, and the swirl strength is defined as the imaginary part of the complex eigen-value of the velocity gradient tensor [
21,
22], and the square of the imaginary part can be computed as:
,
Figure 13c shows the contour maps of the planar 2nd invariant Q, the 2nd invariant Q of the velocity gradient matrix [
23,
24], which can be used to identify vortices, can be defined as
.
Figure 13d shows the contour maps of the lambda 2 criterion, detailed definitions and calculation formulas of the lambda 2 criterion can be found in the literature [
24], The vorticity (x), swirling strength, 2nd invariant Q and lambda 2 conducts dimensionless processing by multiply R/U and R
2/U
2, respectively, where R is the propeller and U is the towing speed. The local minimum negative value of
lambda-2 can be used to identify the vortex core, while the positive value indicates the flow field, and the shear flow may be displayed but not rotated. The local maximum positive value of the swirling strength and planar 2nd invariant Q can be used to identify the vortex core. A strong bilge vortex (Bv) will be produced when the water flows through the U-shaped stern. There is a propeller hub cap vortex (Hcv) under the bilge vortex, which is opposite to the rotation direction of the bilge vortex, and the hub cap vortex is close to the longitudinal section of the ship. Under the ballast condition, the ship has a trim by the stern, and the draft is smaller than that under the design condition. Influenced by the position of the ship, the bilge vortex formed by the U-shaped stern moves down, which is almost in parallel with the hub cap vortex. The position of the hub cap vortex changes a little bit; however, the rotating range is larger than that under the design condition. The lambda 2-criterion, the vorticity, and planar 2nd invariant Q all recognize the bilge vortices and the propeller hub cap vortex. The positive value of the
vorticity (
x) indicates that the local vortex rotates anticlockwise and vice versa. The bilge vortex generated by the bilge area in the middle of the hull rotates anticlockwise on the port side and on the starboard side. In addition, it is transmitted to the propeller disk, and it is located within the velocity contour range from
u/
U = 0.3 to
u/U = 0.5 (
Figure 3). The hub cap vortex has the opposite rotation direction to the bilge vortex and it is generated by the hub at the installation position of the propeller on the shaft of the hull. In addition, it is transmitted to the propeller disk area along with the wake. The hub cap vortex is located along the velocity contour range of
u/
U < 0.3 (
Figure 3). According to the contour of the vorticity and swirling strength, the bilge vortex on the propeller disk appears “round-like” under the design condition and is “ear-like” under the ballast condition.
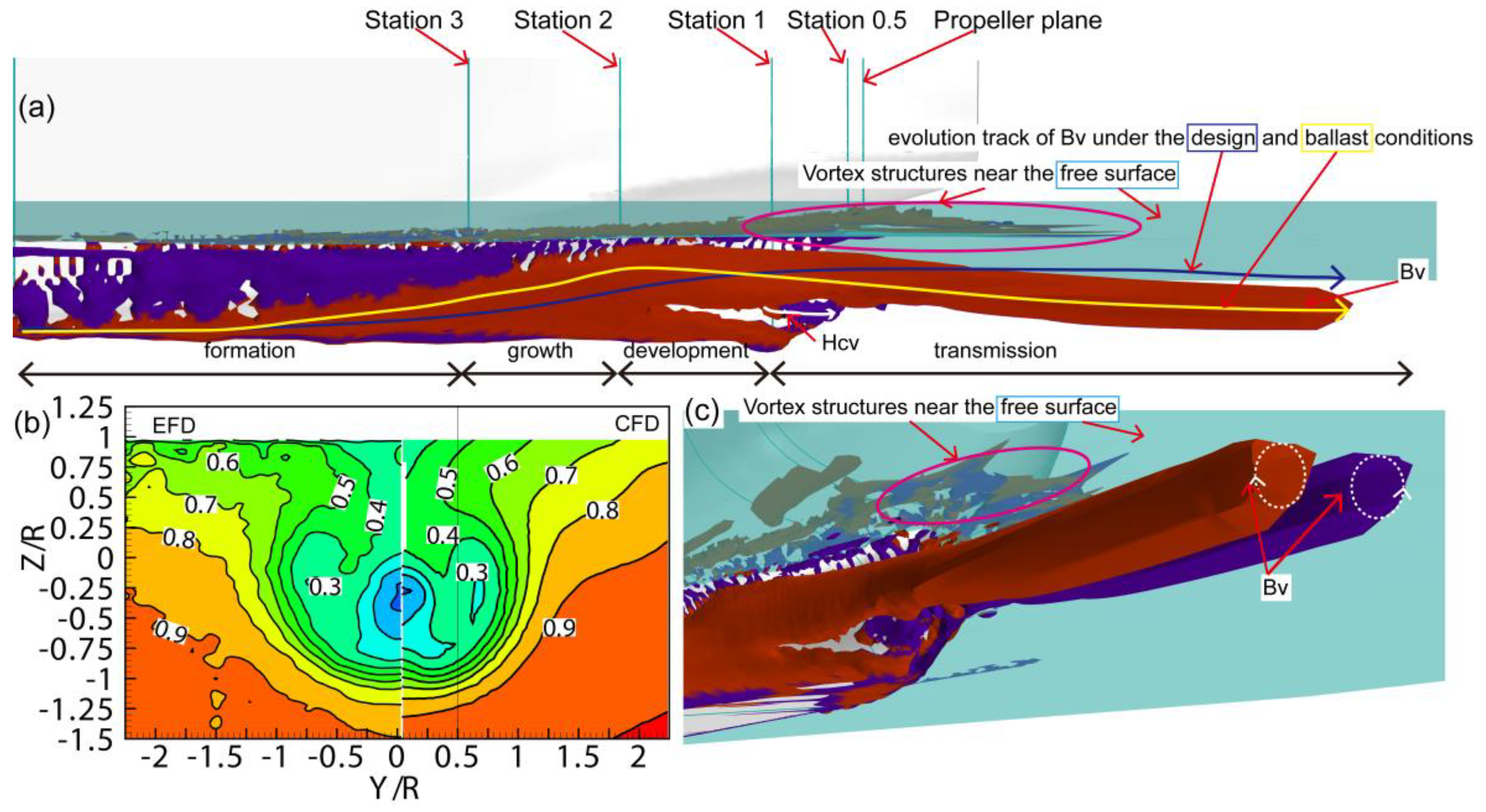
In order to analyze the vortex evolution characteristics of Panama bulk carriers under ballast condition, CFD numerical simulation analysis was carried out using the formed calculation strategy [
2,
25].
Figure 14 is the vortex evolution of Panama bulk carrier under the ballast condition based on CFD. As shown in
Figure 14b, the CFD numerical results agree well with the PIV measurement results, which verifies the accuracy of the numerical calculation.
Figure 14a,c is the global evolution and close-up view of the vortex structure, under the ballast condition. In addition to the bilge vortex and hubcap vortex similar to the design one, there are also vortex structures near the free surface caused by fluctuations of free surface. In addition, the evolution trajectories of the bilge vortex and the hub cap vortex in ballast are different from the design ones.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}