Figure 1.
Slider-crank mechanism.
Figure 1.
Slider-crank mechanism.
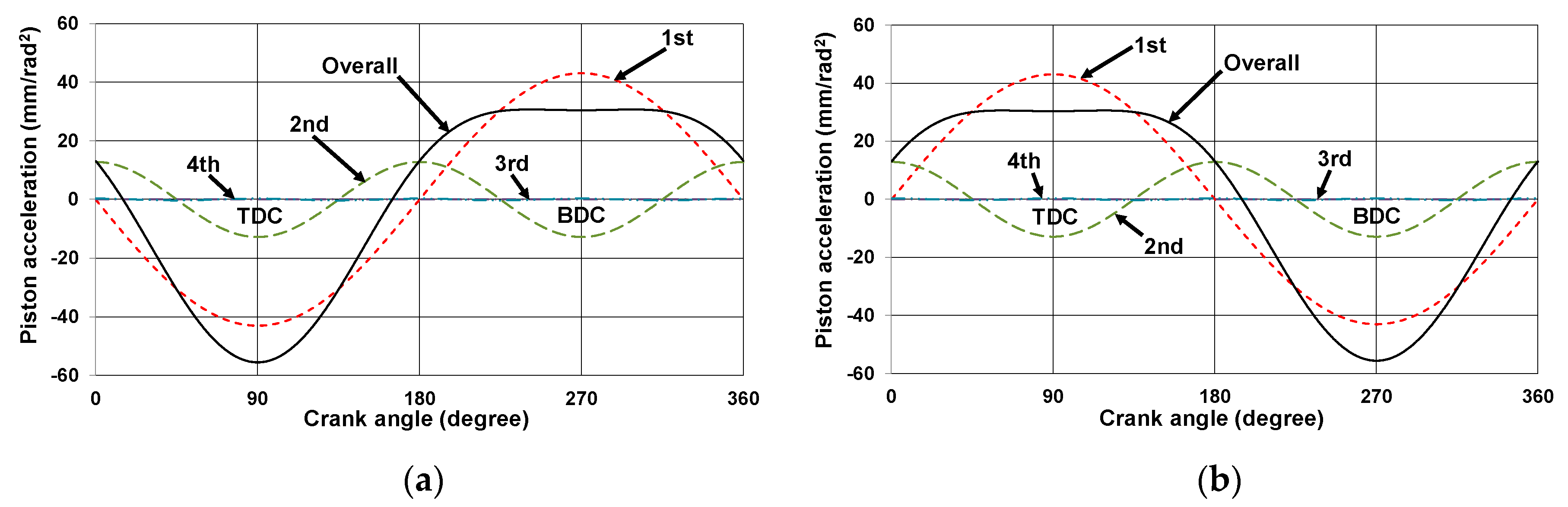
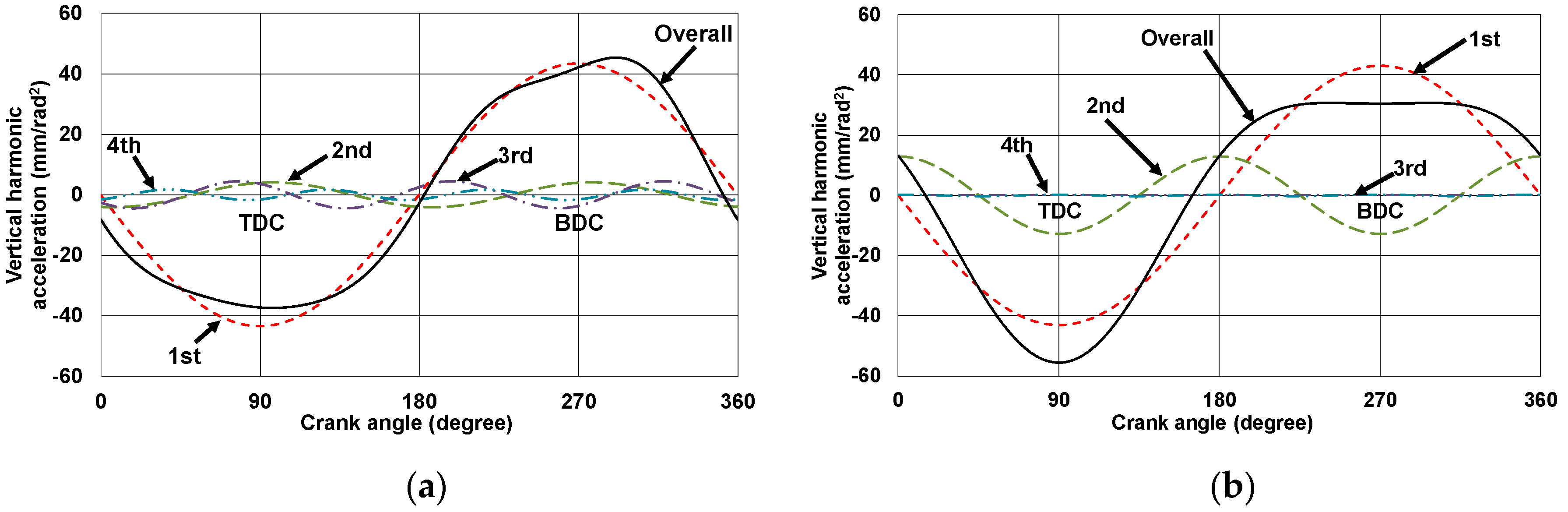
Figure 2.
Harmonic acceleration components at the piston pin of slider-crank mechanism: (a) Cylinder 1 and (b) Cylinder 2.
Figure 2.
Harmonic acceleration components at the piston pin of slider-crank mechanism: (a) Cylinder 1 and (b) Cylinder 2.
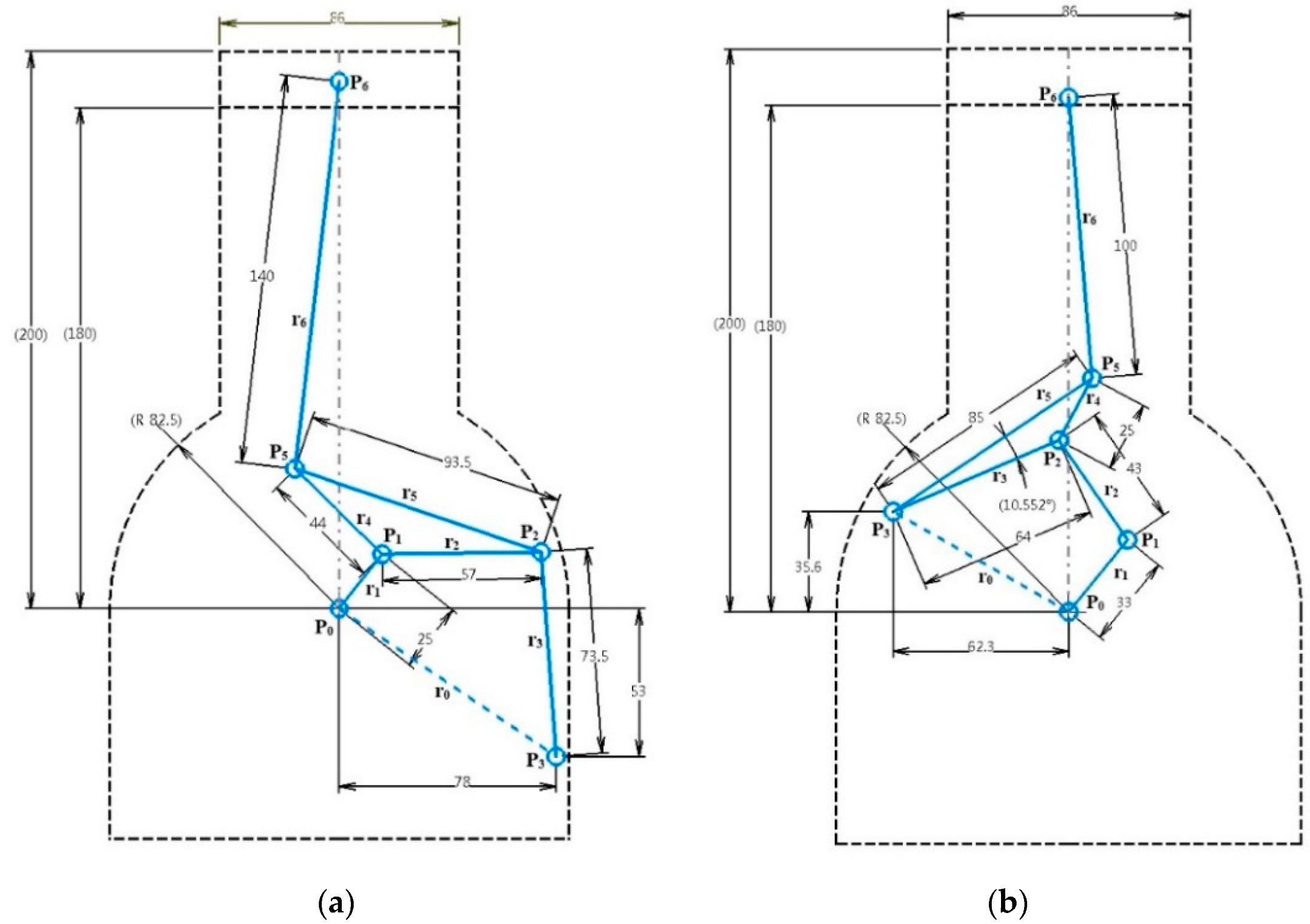
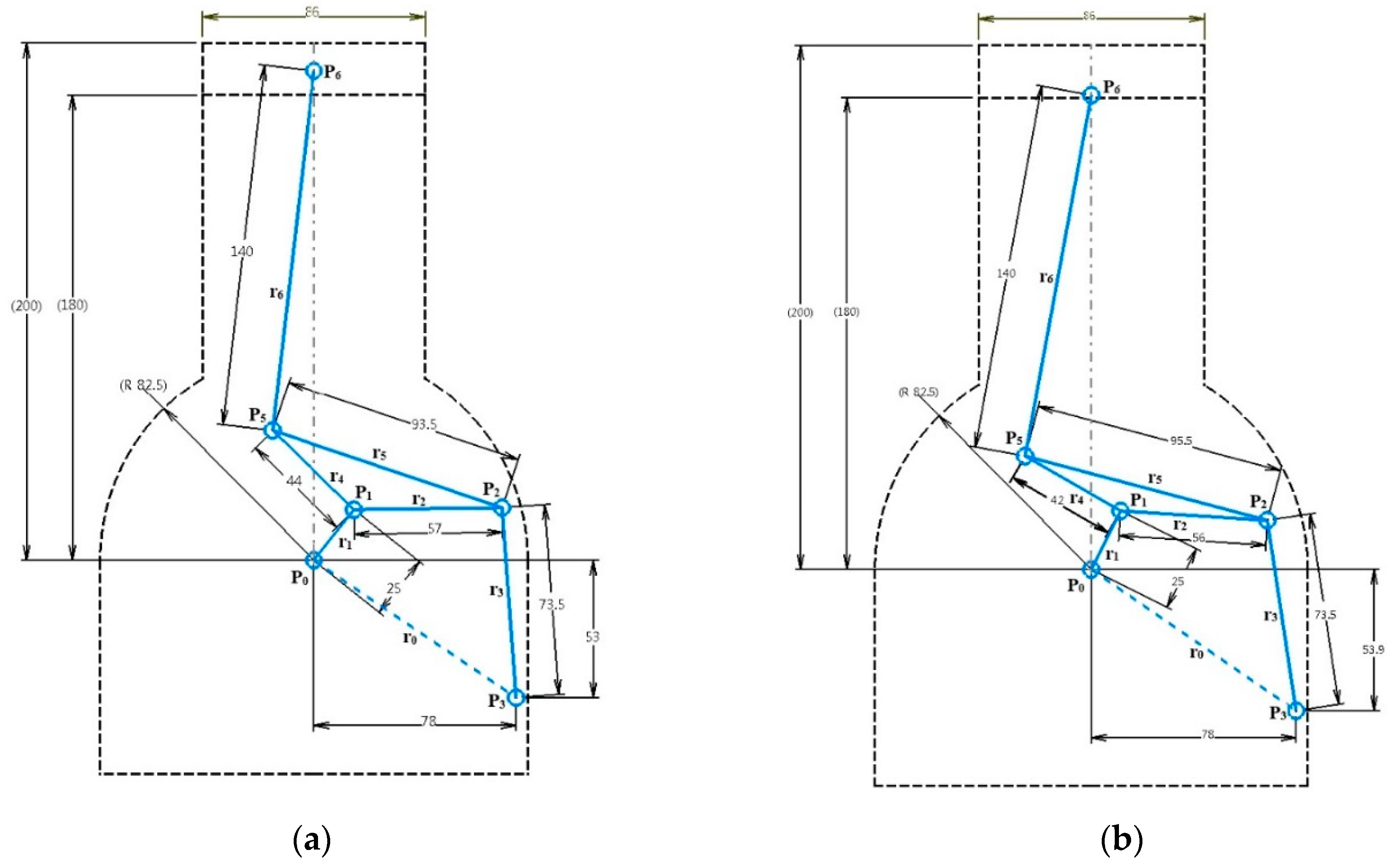
Figure 3.
Initial design of VCR engine mechanisms: (a) Stephenson III and (b) Watt II.
Figure 3.
Initial design of VCR engine mechanisms: (a) Stephenson III and (b) Watt II.
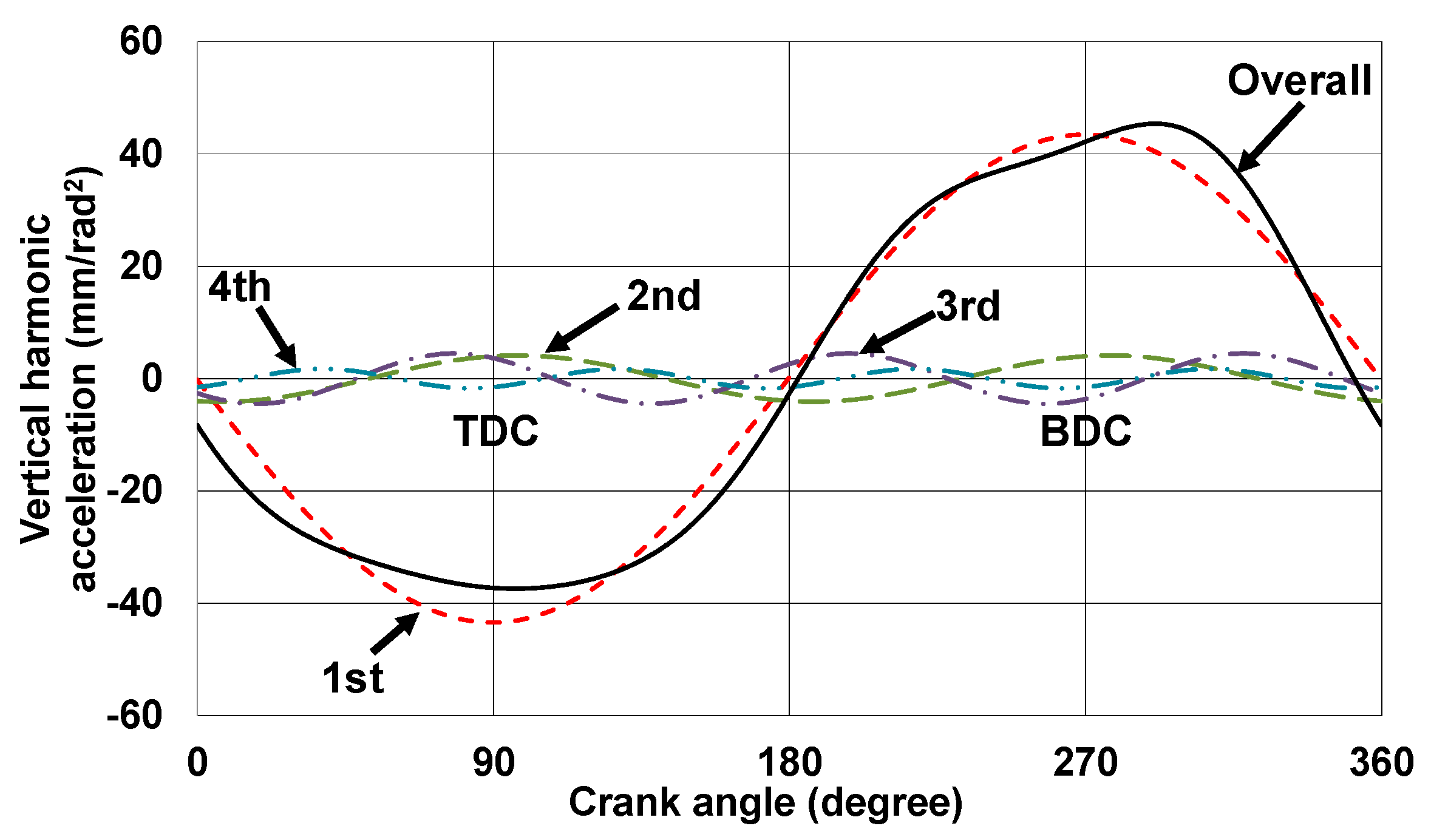
Figure 4.
Vertical harmonic acceleration components at piston pin (P6) of the initially designed Stephenson III mechanism in a single cylinder.
Figure 4.
Vertical harmonic acceleration components at piston pin (P6) of the initially designed Stephenson III mechanism in a single cylinder.
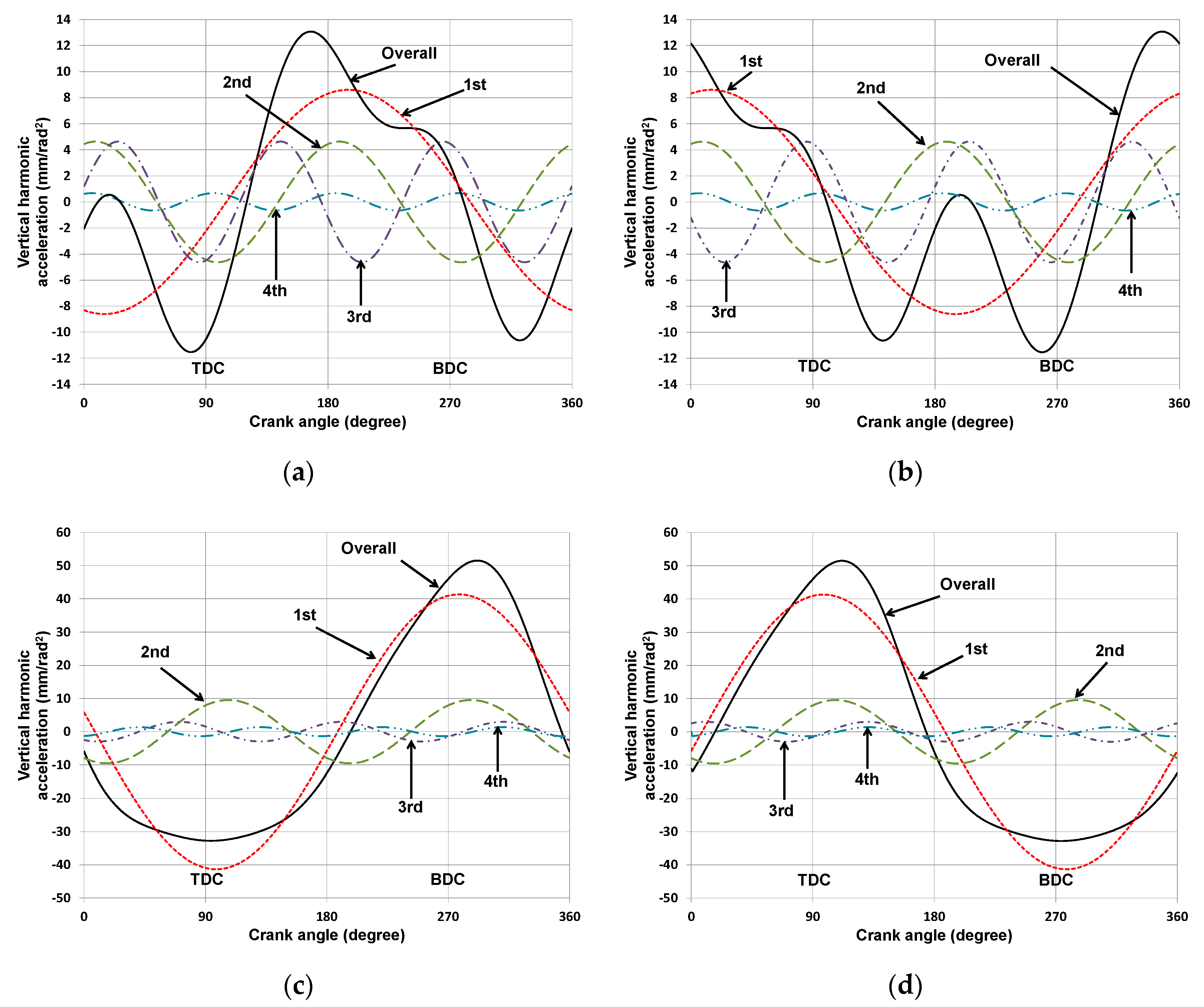
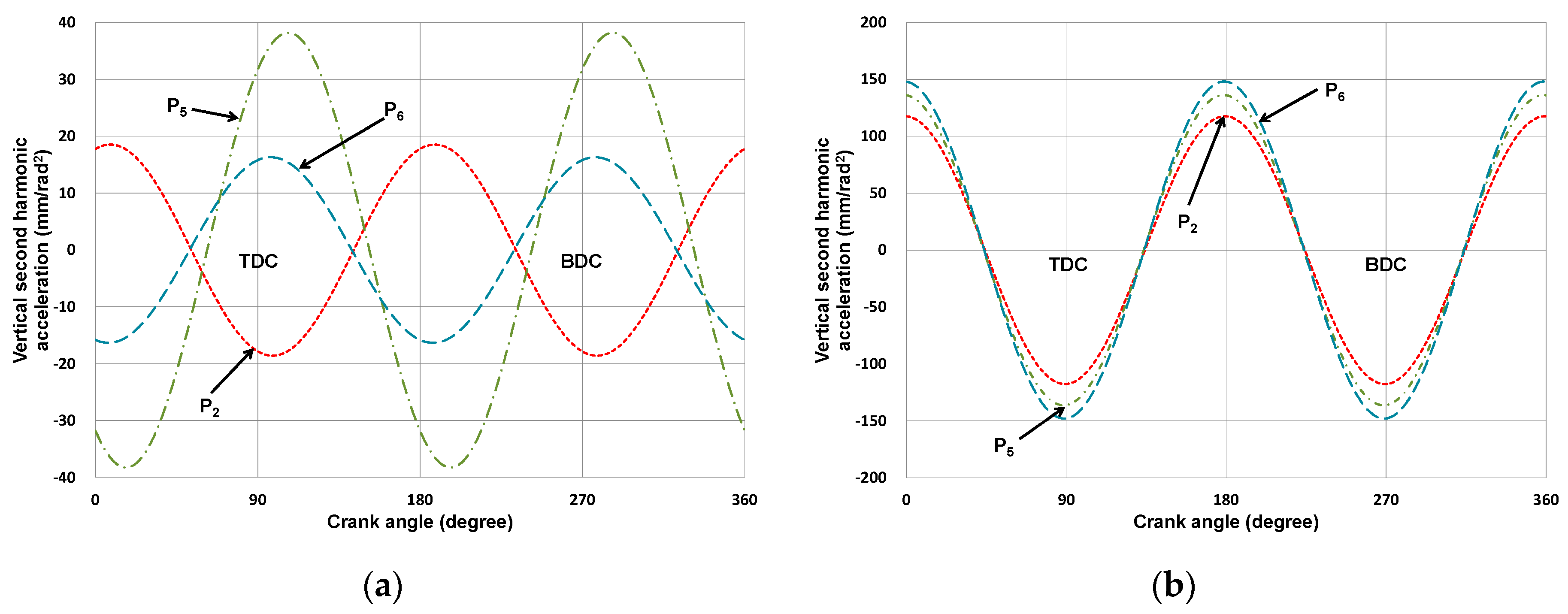
Figure 5.
Vertical harmonic acceleration components at joints P2 and P5 of the initially designed Stephenson III mechanism: (a) Joint P2 in Cylinder 1; (b) Joint P2 in Cylinder 2; (c) Joint P5 in Cylinder 1; and (d) Joint P5 in Cylinder 2.
Figure 5.
Vertical harmonic acceleration components at joints P2 and P5 of the initially designed Stephenson III mechanism: (a) Joint P2 in Cylinder 1; (b) Joint P2 in Cylinder 2; (c) Joint P5 in Cylinder 1; and (d) Joint P5 in Cylinder 2.
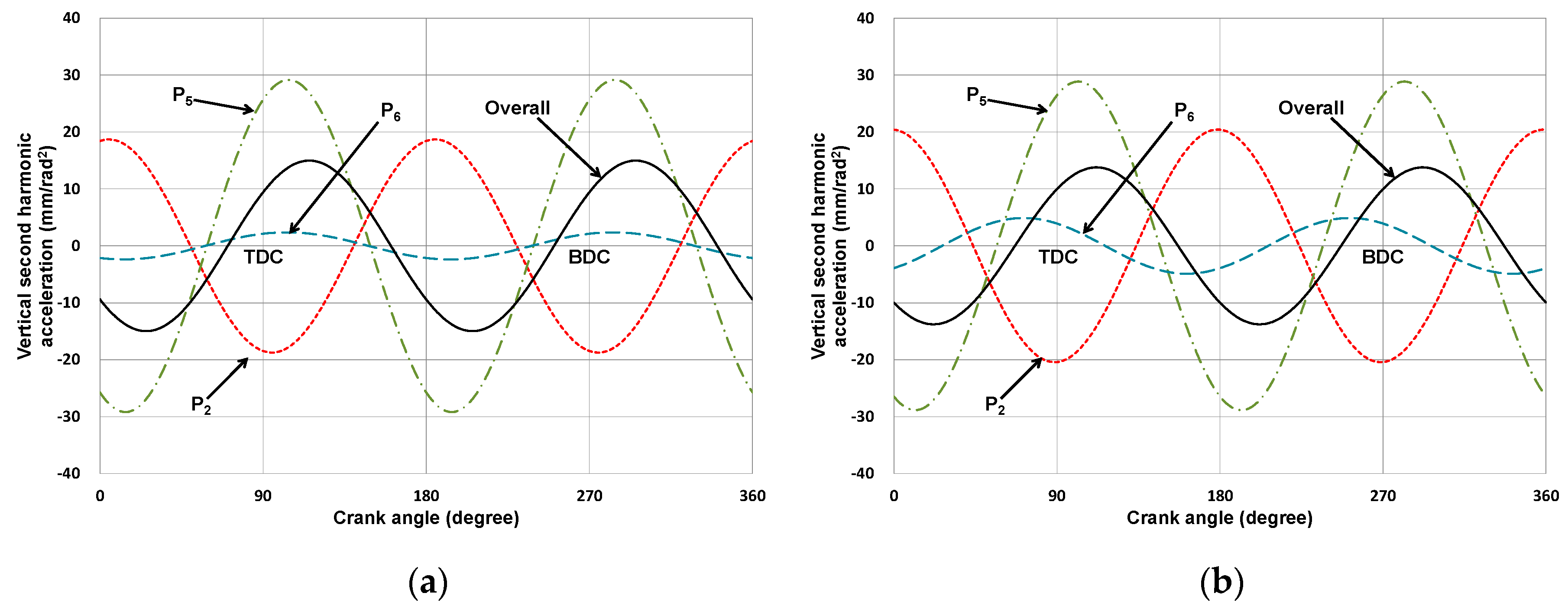
Figure 6.
Vertical second harmonic acceleration at each joint in candidate mechanisms in the in-line four-cylinder engine: (a) initially designed Stephenson III and (b) initially designed Watt II.
Figure 6.
Vertical second harmonic acceleration at each joint in candidate mechanisms in the in-line four-cylinder engine: (a) initially designed Stephenson III and (b) initially designed Watt II.
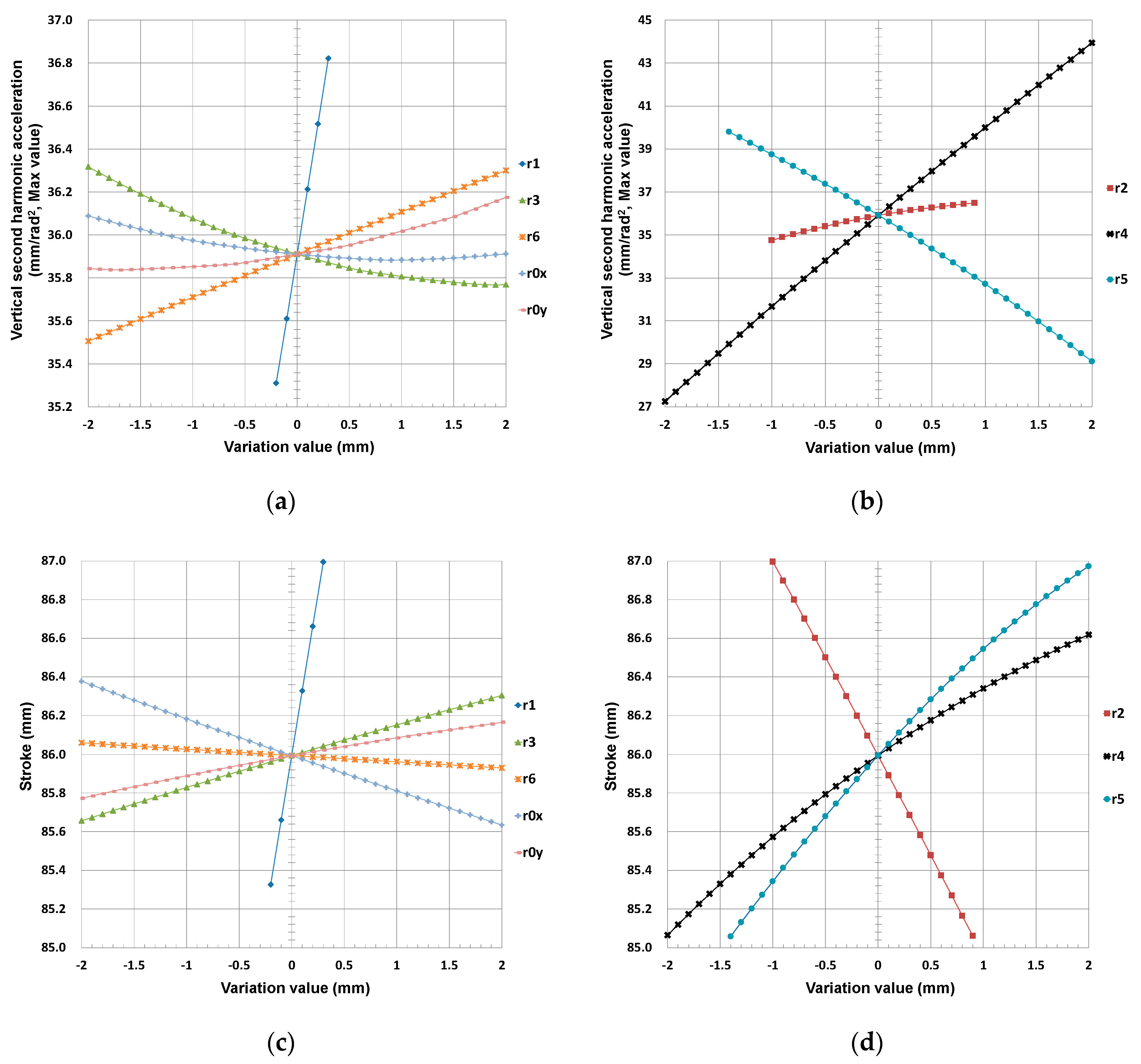
Figure 7.
Influence on the maximum of vertical second harmonic acceleration sum of length change in: (a) r1, r3, r6, r0x, and r0y and (b) r2, r4, and r5 of the ternary link; influence on the stroke of length change in: (c) r1, r3, r6, r0x, and r0y and (d) r2, r4, and r5 in the in-line four-cylinder engine.
Figure 7.
Influence on the maximum of vertical second harmonic acceleration sum of length change in: (a) r1, r3, r6, r0x, and r0y and (b) r2, r4, and r5 of the ternary link; influence on the stroke of length change in: (c) r1, r3, r6, r0x, and r0y and (d) r2, r4, and r5 in the in-line four-cylinder engine.
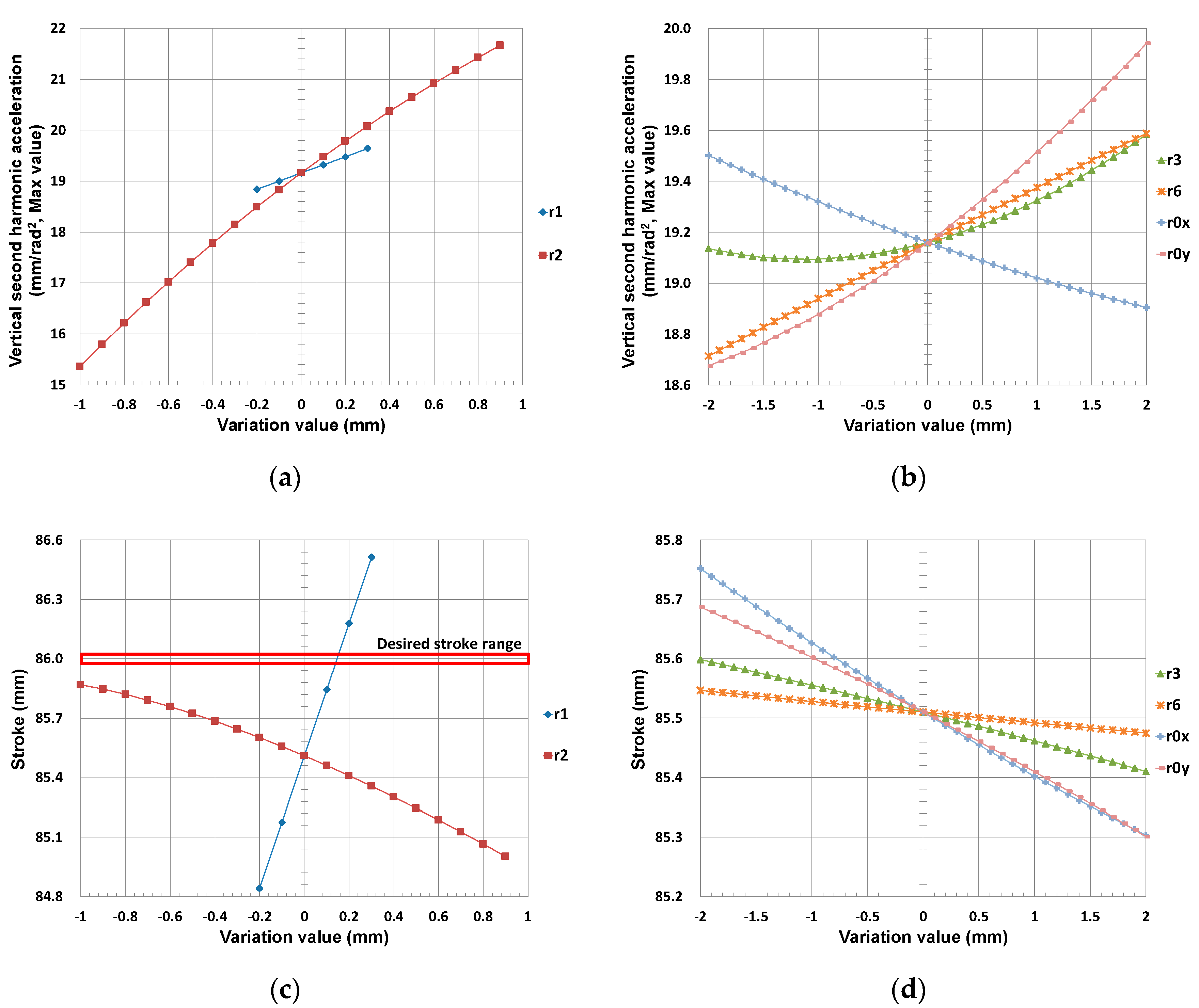
Figure 8.
With the minimum length of r4 and the maximum r5, influence on the maximum of vertical second harmonic acceleration sum of length change in: (a) r1 and r2 and (b) r3, r6, r0x, and r0y; influence on the stroke of length change in: (c) r1 and r2 and (d) r3, r6, r0x, and r0y in the in-line four-cylinder engine.
Figure 8.
With the minimum length of r4 and the maximum r5, influence on the maximum of vertical second harmonic acceleration sum of length change in: (a) r1 and r2 and (b) r3, r6, r0x, and r0y; influence on the stroke of length change in: (c) r1 and r2 and (d) r3, r6, r0x, and r0y in the in-line four-cylinder engine.
Figure 9.
Adjusted stroke and maximum value of vertical second harmonic acceleration sum in each case: (a) adjusted stroke and (b) maximum vertical second harmonic acceleration sum in the in-line four-cylinder engine.
Figure 9.
Adjusted stroke and maximum value of vertical second harmonic acceleration sum in each case: (a) adjusted stroke and (b) maximum vertical second harmonic acceleration sum in the in-line four-cylinder engine.
Figure 10.
Stephenson III VCR engine mechanism: (a) initial design and (b) final design.
Figure 10.
Stephenson III VCR engine mechanism: (a) initial design and (b) final design.
Figure 11.
Vertical harmonic acceleration components at piston pin in single cylinder engine: (a) final design of the Stephenson III mechanism and (b) the slider-crank mechanism.
Figure 11.
Vertical harmonic acceleration components at piston pin in single cylinder engine: (a) final design of the Stephenson III mechanism and (b) the slider-crank mechanism.
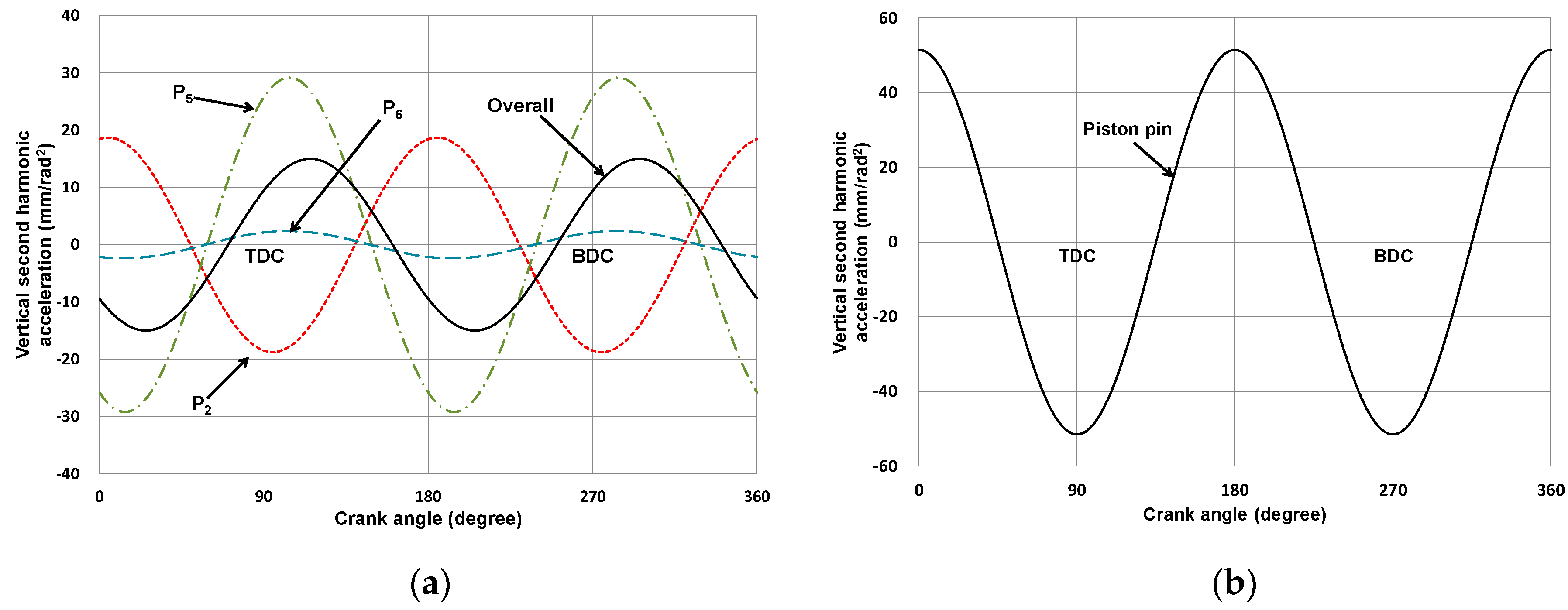
Figure 12.
Vertical second harmonic acceleration components at each joint in four-cylinder engine: (a) final design of the Stephenson III mechanism and (b) the slider-crank mechanism.
Figure 12.
Vertical second harmonic acceleration components at each joint in four-cylinder engine: (a) final design of the Stephenson III mechanism and (b) the slider-crank mechanism.
Figure 13.
Vertical second harmonic acceleration components at joints of the Stephenson III mechanism in the four-cylinder engine: (a) proposed method and (b) optimization using commercial software.
Figure 13.
Vertical second harmonic acceleration components at joints of the Stephenson III mechanism in the four-cylinder engine: (a) proposed method and (b) optimization using commercial software.
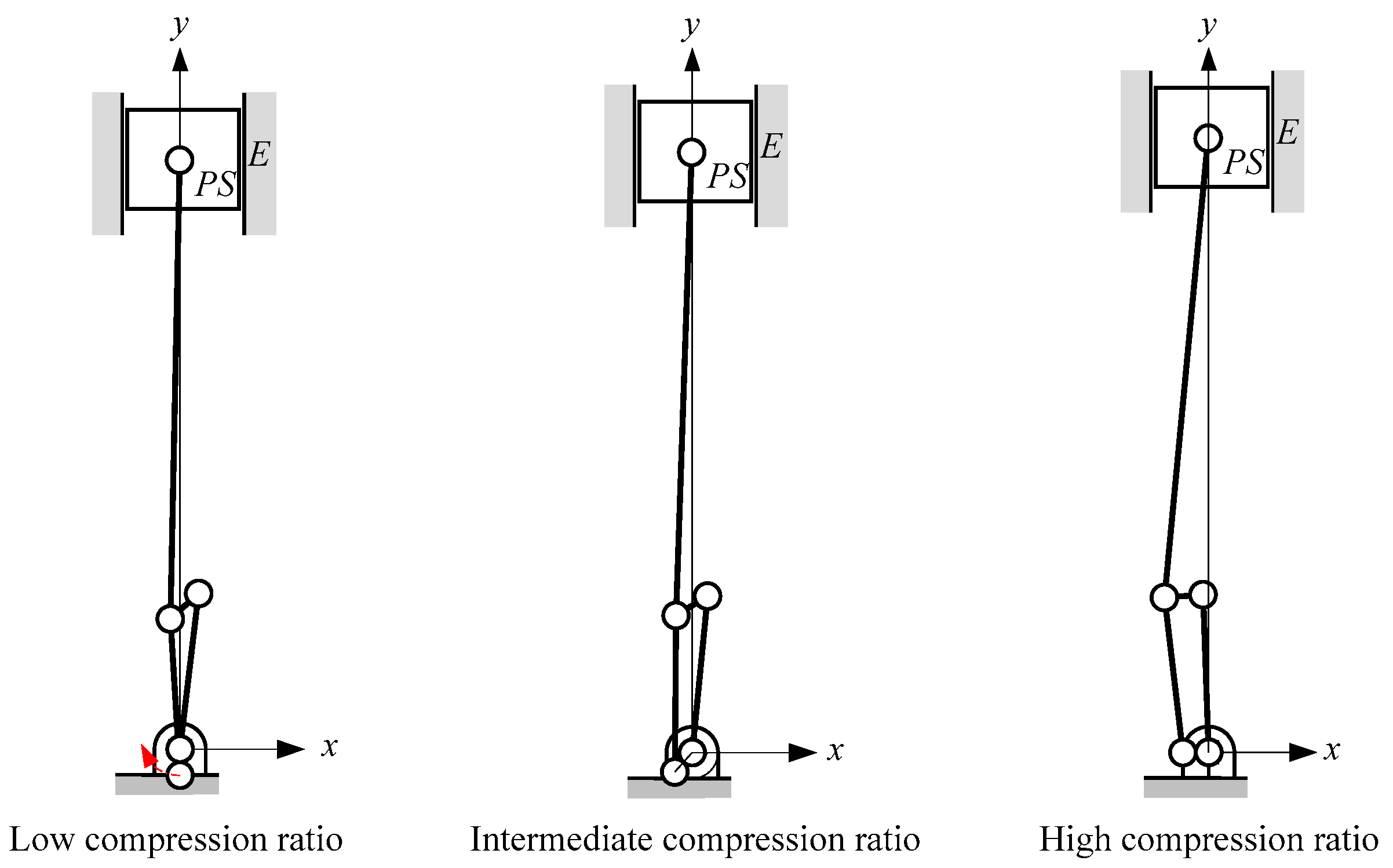
Figure 14.
Stephenson III VCR engine mechanisms with double-crank type four-bar linkage.
Figure 14.
Stephenson III VCR engine mechanisms with double-crank type four-bar linkage.
Table 1.
Candidate variable compression ratio (VCR) engine mechanisms.
Table 2.
Design specifications for VCR engine mechanism.
Table 2.
Design specifications for VCR engine mechanism.
| Engine Type | In-Line Four-Cylinder |
|---|
| Crank throw phase angle | 90°, 270°, 270°, 90° |
| Bore | 86 mm |
| Stroke | 86 ± 0.025 mm |
| TDC position | 220 ± 10 mm (Piston pin: 190 ± 10 mm) |
| Displacement | 2 L |
| Piston offset | 0 mm |
| Radius of engine block internal space | 82.5 mm (measured form crank center) |
Table 3.
Dimensions of the initially designed VCR engine mechanisms.
Table 3.
Dimensions of the initially designed VCR engine mechanisms.
| Link | Link Length and Pivot Position (Unit: mm) |
|---|
| Stephenson III Mechanism | Watt II Mechanism |
|---|
| r1 | 25.000 | 33.000 |
| r2 | 57.000 | 43.000 |
| r3 | 73.500 | 64.000 |
| r4 | 44.000 | 25.000 |
| r5 | 93.500 | 85.000 |
| r6 | 140.000 | 100.000 |
| r0x | 78.000 | −62.300 |
| r0y | −53.000 | 35.600 |
Table 4.
Analysis results of the initially designed mechanisms.
Table 4.
Analysis results of the initially designed mechanisms.
| | Stephenson III | Watt II | Design Specifications |
|---|
| Stroke (mm) | 85.993 | 86.008 | 86 ± 0.025 |
| Piston pin position at TDC (mm) | 197.391 | 199.191 | 190 ± 10 |
Table 5.
Prescribed tolerances.
Table 5.
Prescribed tolerances.
| Link Lengths | ri ± 2 mm |
| Stroke | 86 ± 1 mm |
Table 6.
Link length variation cases for Step S3.
Table 6.
Link length variation cases for Step S3.
| Case | Variation Number | Link Length |
|---|
| r2 | r3 | r4 | r5 | r6 | r0y |
|---|
| 1 | Decrease r3 with min. r2, r4, and max. r5 | 1 | 56 | 73.5 | 42 | 95.5 | 140 | −53 |
| : | 56 | : | 42 | 95.5 | 140 | −53 |
| 21 | 56 | 71.5 | 42 | 95.5 | 140 | −53 |
| 2 | Decrease r6 with min. r2, r4, and max. r5 | 1 | 56 | 73.5 | 42 | 95.5 | 138 | −53 |
| : | 56 | 73.5 | 42 | 95.5 | : | −53 |
| 21 | 56 | 73.5 | 42 | 95.5 | 140 | −53 |
| 3 | Decrease r0y with min. r2, r4, and max. r5 | 1 | 56 | 73.5 | 42 | 95.5 | 140 | −53 |
| : | 56 | 73.5 | 42 | 95.5 | 140 | : |
| 21 | 56 | 73.5 | 42 | 95.5 | 140 | −55 |
Table 7.
Comparison of the initial and final mechanism.
Table 7.
Comparison of the initial and final mechanism.
| | Unit | Initial Design | Final Design | Effect (%) |
|---|
| Link | r1 | mm | 25.000 | 25.000 | |
| r2 | mm | 57.000 | 56.000 | |
| r3 | mm | 73.500 | 73.500 | |
| r4 | mm | 44.000 | 42.000 | |
| r5 | mm | 93.500 | 95.500 | |
| r6 | mm | 140.000 | 140.000 | |
| r0x | mm | 78.000 | 78.000 | |
| r0y | mm | −53.000 | −53.900 | |
| Result | Stroke | mm | 85.994 | 86.018 | |
| Piston pin position at TDC | mm | 197.391 | 185.124 | |
| Max. of 2nd harmonic acceleration sum | mm/rad2 | 35.911 | 14.963 | −58.333 |
| Max. of 4th harmonic acceleration sum | mm/rad2 | 10.714 | 6.977 | −34.882 |
Table 8.
Comparison of the results of the proposed method and the constrained optimization.
Table 8.
Comparison of the results of the proposed method and the constrained optimization.
| | Unit | Initial Design | Result of Proposed Method | Result of Optimization | Effect (%) |
|---|
| Link | r1 | mm | 25.000 | 25.000 | 24.95798 | - |
| r2 | mm | 57.000 | 56.000 | 56.00000 | - |
| r3 | mm | 73.500 | 73.500 | 73.44895 | - |
| r4 | mm | 44.000 | 42.000 | 42.00000 | - |
| r5 | mm | 93.500 | 95.500 | 95.49999 | - |
| r6 | mm | 140.000 | 140.000 | 138.0000 | - |
| r0x | mm | 78.000 | 78.000 | 80.00000 | - |
| r0y | mm | −53.000 | −53.900 | −55.00000 | - |
| Result | Stroke | mm | 85.994 | 86.018 | 85.975 | - |
| Piston pin position | mm | 197.391 | 185.124 | 184.424 | - |
| Max. 2nd harmonic acceleration sum | mm/rad2 | 35.911 | 14.963 | 13.773 | −7.940 |
| Max. 4th harmonic acceleration sum | mm/rad2 | 10.714 | 6.977 | 7.114 | +1.997 |
Table 9.
Vertical second harmonic acceleration components in the finally designed single-cylinder Stephenson III with crank-rocker four bar at low and high compression ratios.
Table 9.
Vertical second harmonic acceleration components in the finally designed single-cylinder Stephenson III with crank-rocker four bar at low and high compression ratios.
| Mechanism | Unit | Stephenson III (Crank-Rocker) | Slider Crank |
|---|
| Compression ratio | - | 8 | 16.5 | - |
| r0x | mm | 72.100 | 78.000 | - |
| r0y | mm | −46.900 | −53.900 | - |
| Stroke | mm | 85.502 | 86.018 | 86.000 |
| 2nd harmonic acceleration at piston pin | m/s2 | 3.701 | 0.588 | 12.691 |
| Max. 2nd harmonic acceleration sum | m/s2 | 5.542 | 3.692 | 12.691 |

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}





