Investigation of the Error of Mean Representative Current Velocity Based on the Method of Bins for Tidal Turbines Using ADP Data


Abstract
:1. Introduction
- (1)
- Turbulence intensity (TI);
- (2)
- Tilt;
- (3)
- Doppler noise;
- (4)
- Beam misalignment.
- (1)
- Generate synthetic data using four key uncertainty parameters of an ADP as identified in literature.
- (2)
- Investigate the error and uncertainty of the MRV using the existing IEC standards.
- (3)
- Introduce an alternative method (temporal-spatial method) which reduces error and uncertainty of the MRV.
- (4)
- Compare the uncertainties of MRVs based on the IEC standards and the temporal-spatial method.
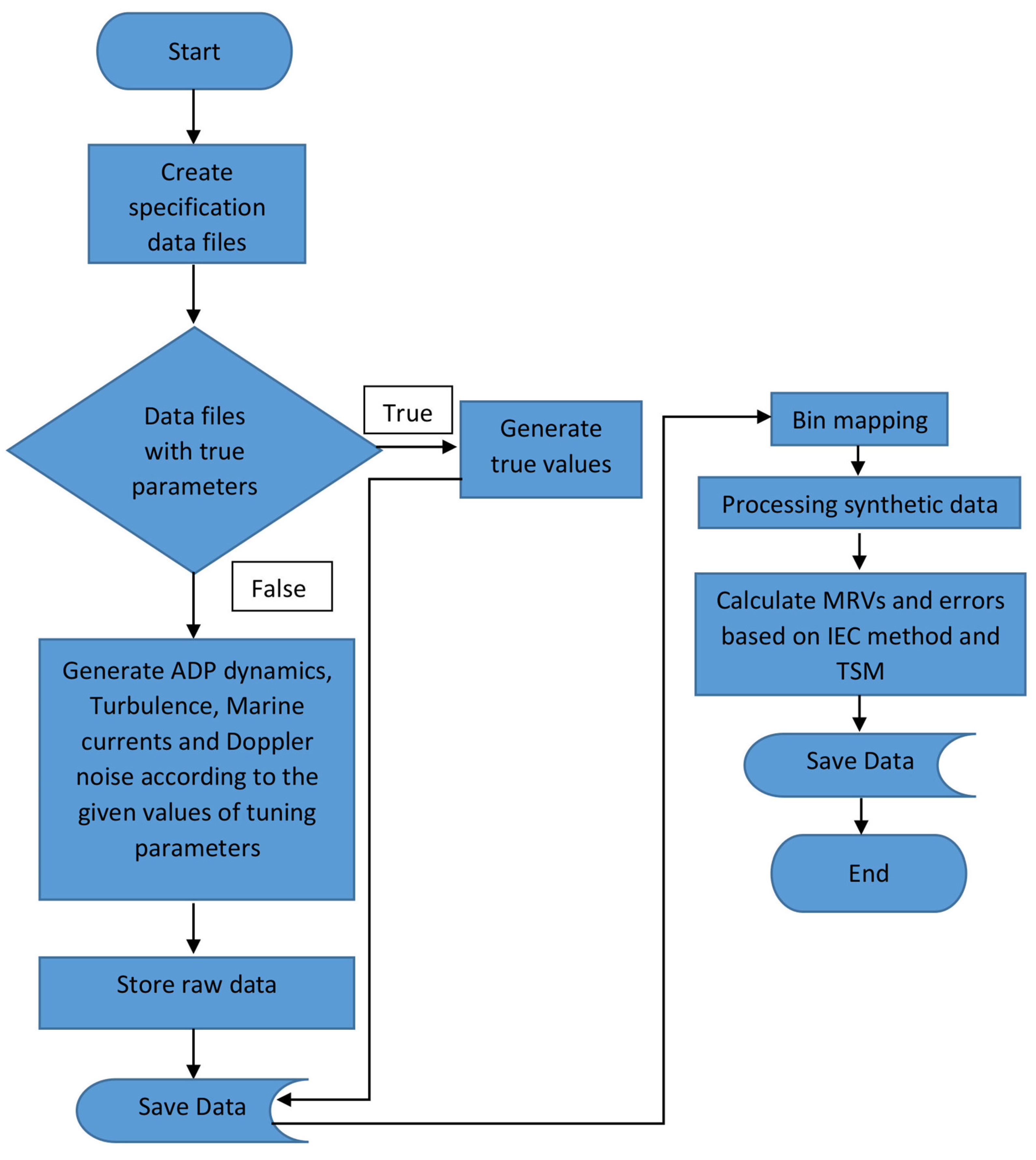
2. Synthetic Data
2.1. Data Generation
2.1.1. Currents
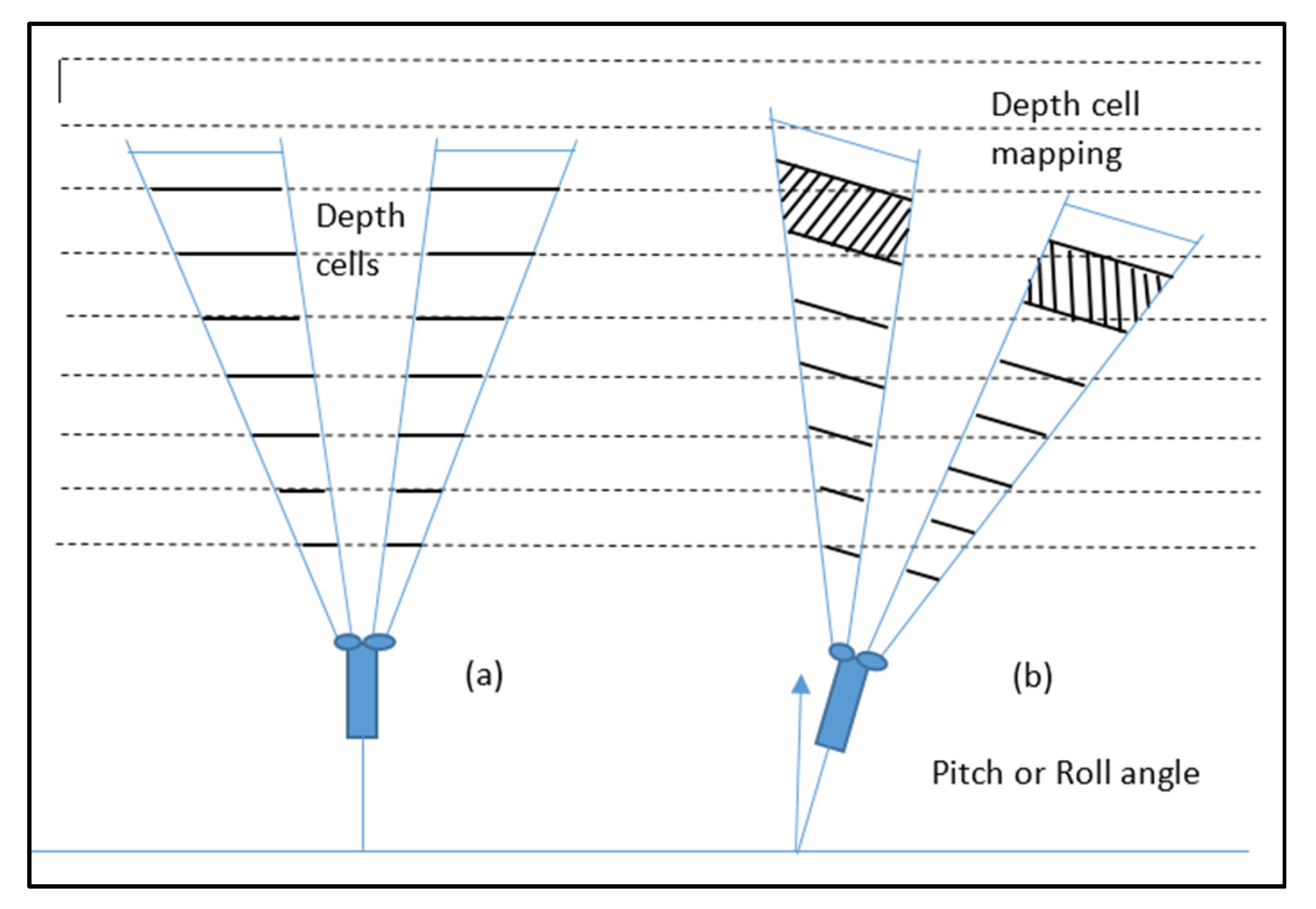
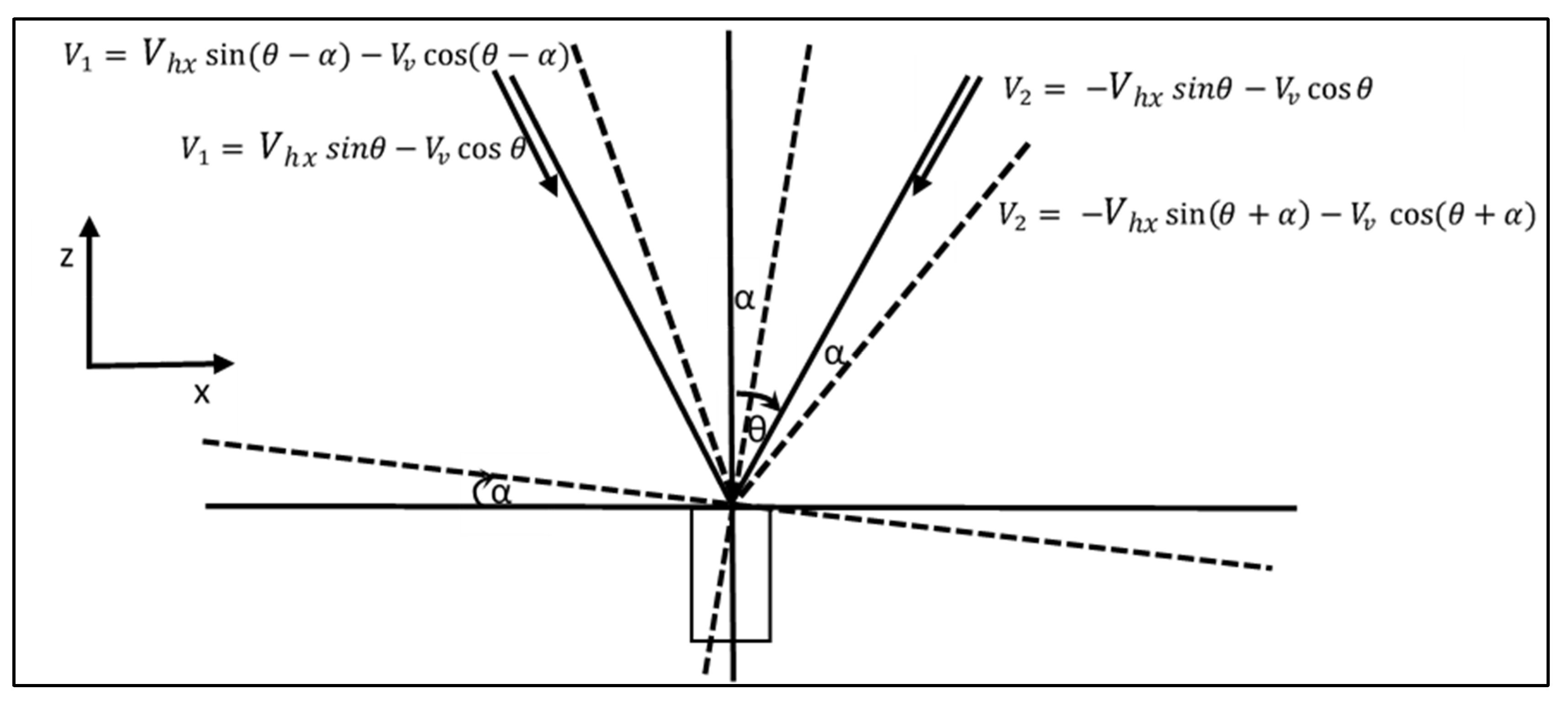
2.1.2. Pitch/Roll Movements
2.1.3. Beam Misalignment
2.1.4. Turbulence
2.1.5. Doppler Noise
3. Processing Data
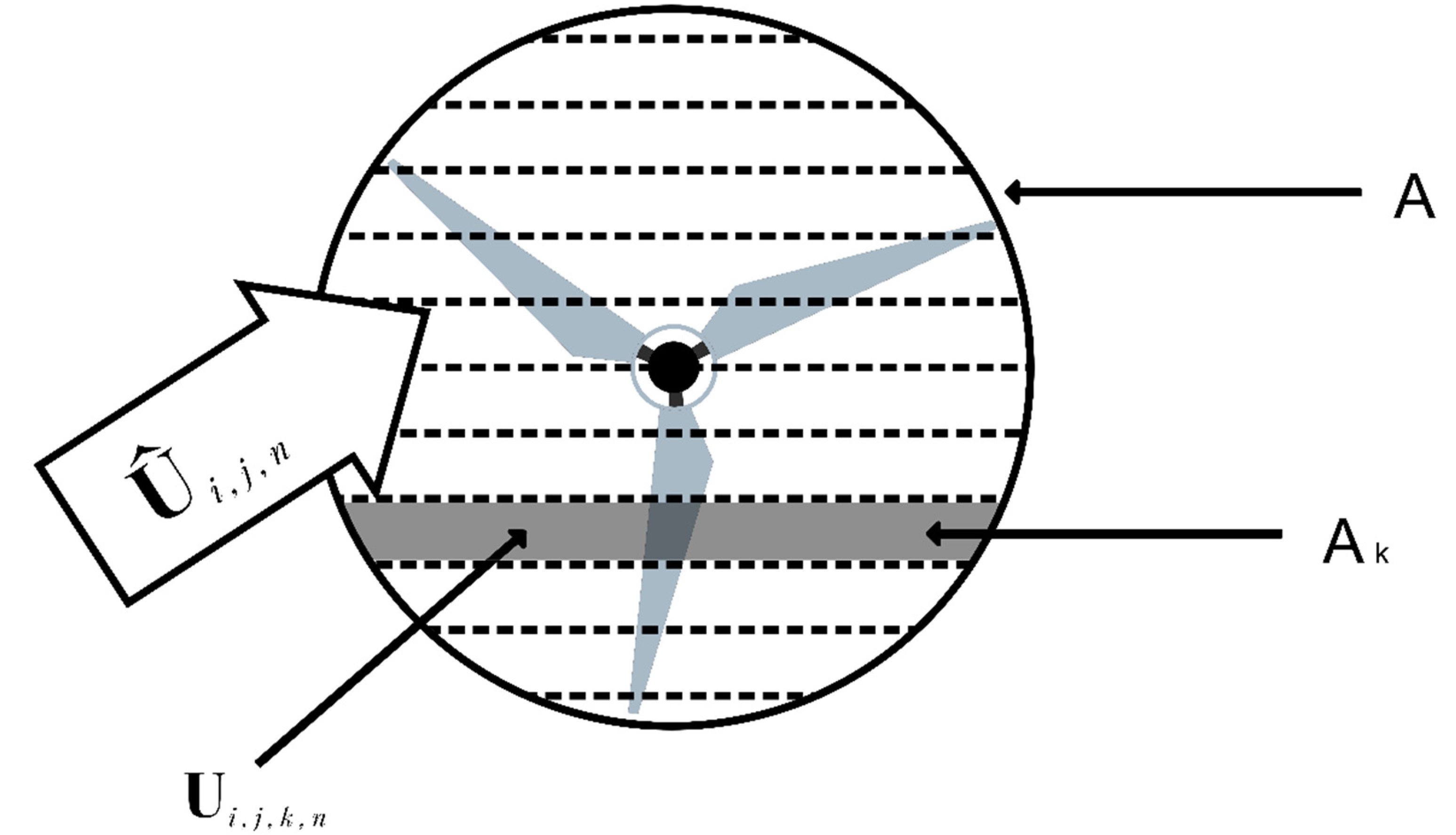
3.1. MRV Based on IEC Standards (Methoof Bins)
3.2. Temporal-Spatial Method(TSM) for Calculating MRV
4. Results
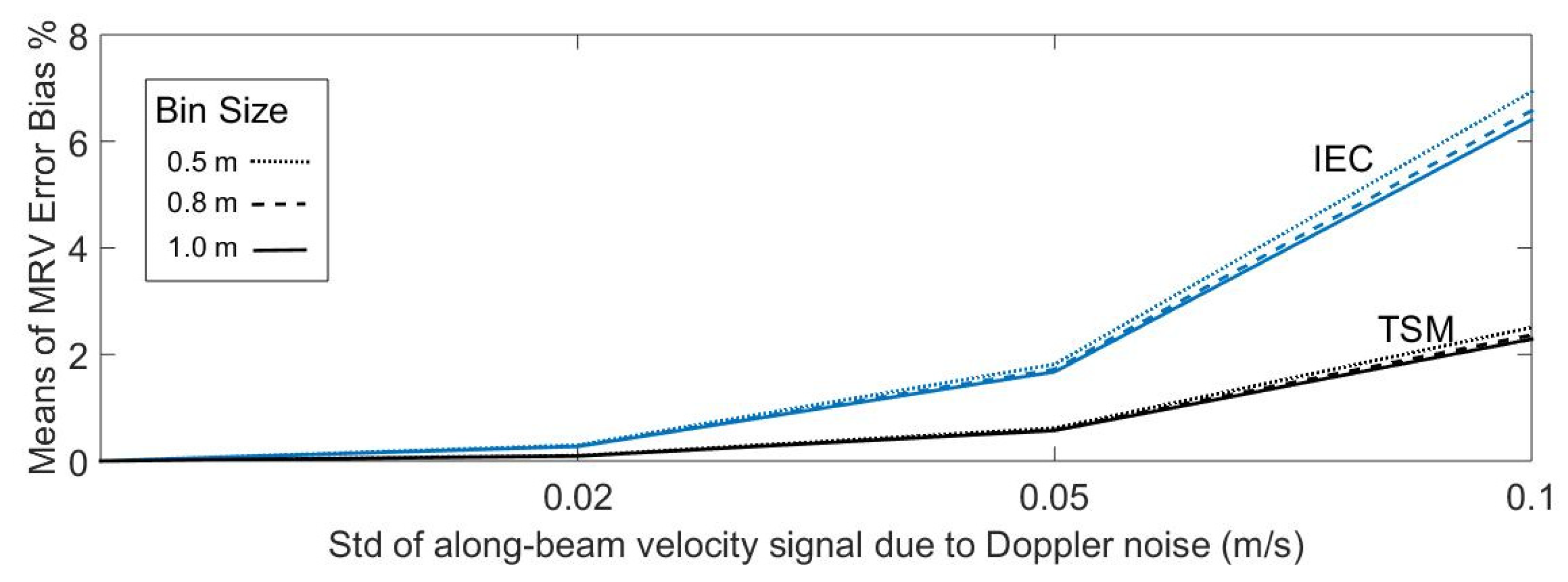
4.1. Selecting Bin Size to Reduce MRV Error due to Doppler Noise
4.2. Deviations in Means of MRV with True Data
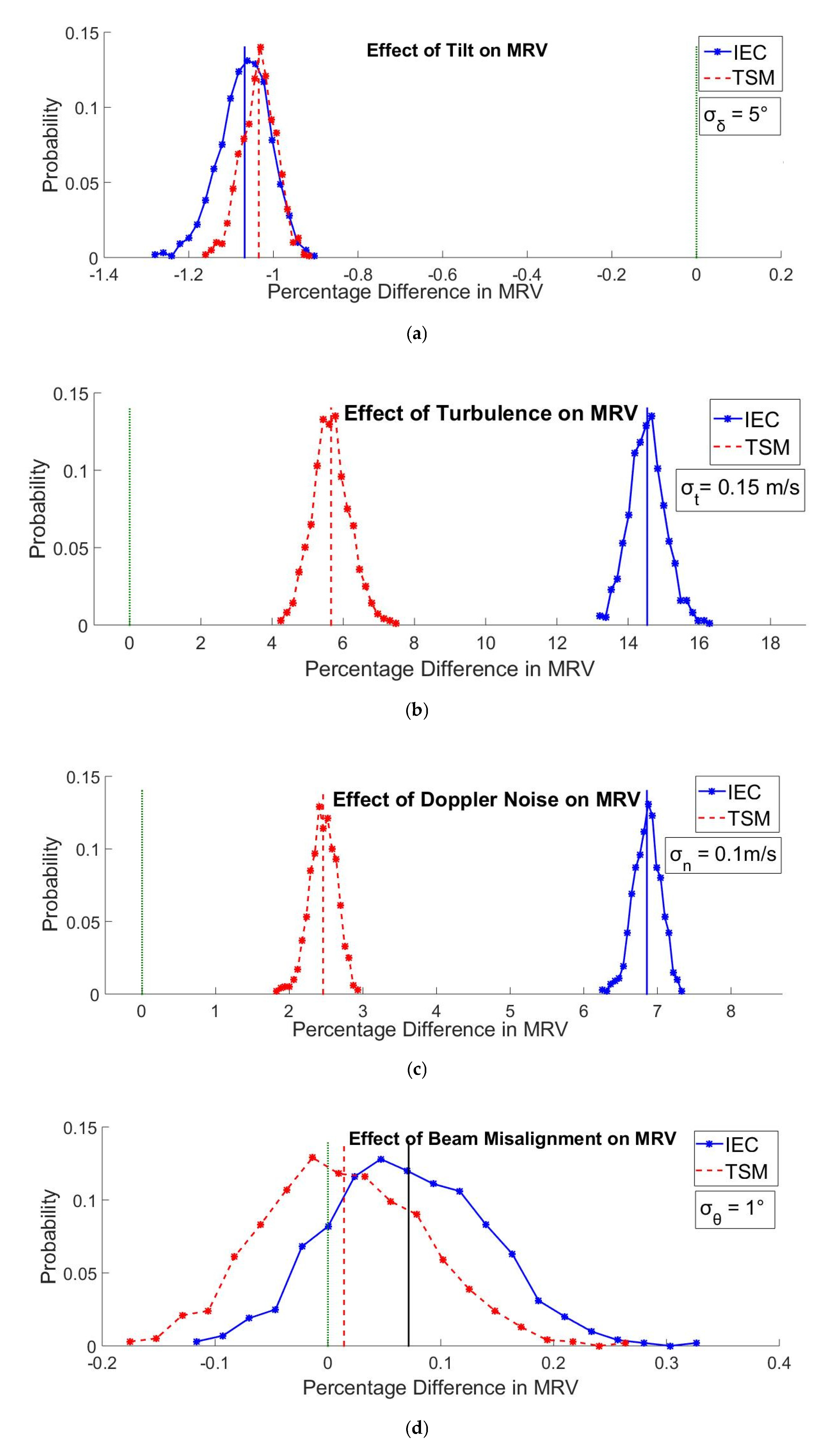
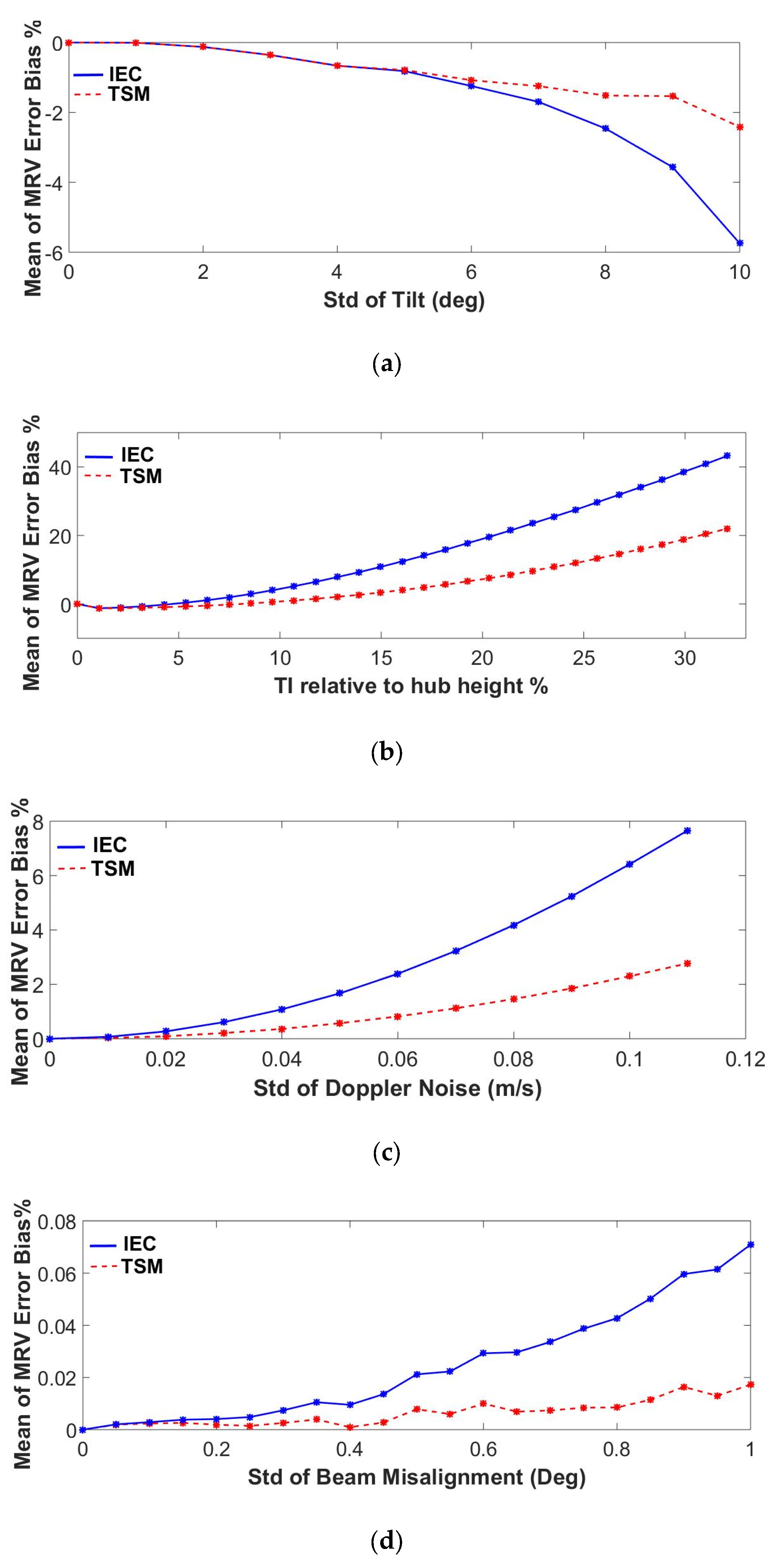
4.3. Sensitivity Analysis
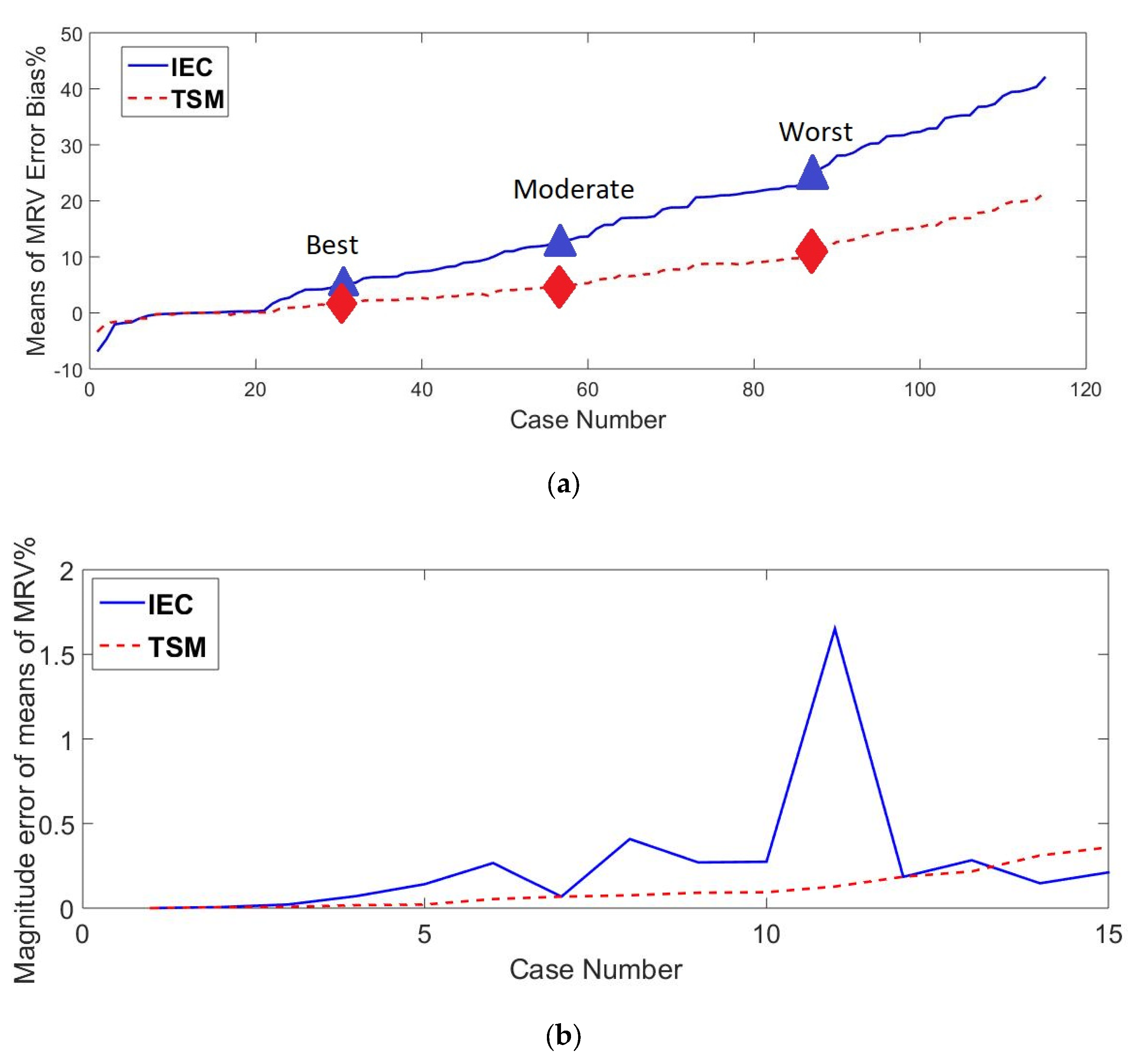
4.4. MRV Variation with Synthetically Modified Data
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| Swept area in the depth bin | |
| Water depth (m) | |
| Rotor hub height above seabed (m) | |
| Height above seabed (m) | |
| i | Velocity bin number |
| j | Time step number |
| L | Total number of time steps |
| n | Number of data points |
| Current profile power-law coefficient | |
| R | The rotor radius (m) |
| Approximate correlation matrix using Choleskey decomposition | |
| S | Total number of velocity bins across the projected captured area |
| Magnitude of the instantaneous current velocity at time j, at velocity bin i for data point n (m/s) | |
| Instantaneous power weighted current velocity across the projected captured area (m/s) | |
| Mean power weighted current velocity (MRV) for n data points based on the IEC standard method (m/s) | |
| Horizontal current velocity at surface | |
| Instantaneous beam velocity at each bin at time t (m/s) for beam1–beam2 plane | |
| Instantaneous beam velocity at each bin at time t (m/s) for beam3–beam4 plane | |
| Beam velocity due to currents | |
| Horizontal current velocity at height above seabed | |
| Time-averaged horizontal instrument velocity at each bin either in beam 1-2 or beam 3-4 plane (m/s) | |
| Mean current velocity at hub height (m/s) | |
| Horizontal instrument velocity component in the plane defined by beam 1 and 2 (m/s) | |
| Horizontal instrument velocity component in the plane defined by beam 3 and 4 (m/s) | |
| Time-averaged horizontal instrument velocity at each bin for beam1-beam2 plane (m/s) | |
| Time-averaged horizontal instrument velocity at each bin for beam3-beam4 plane (m/s) | |
| Beam velocities for each beam where i is the beam from 1–4 | |
| Beam velocity due to Doppler noise | |
| Total beam velocity | |
| Beam velocity due to turbulence | |
| Instantaneous velocity due to turbulence at each bin at time t for beam1-beam2 plane (m/s) | |
| Instantaneous velocity due to turbulence at each bin at time t for beam3-beam4 plane (m/s) | |
| Vertical instrument velocity component (m/s) | |
| Temporal-averaged current velocity in velocity bin i for n data points (m/s) | |
| Mean power weighted current velocity (MRV) for n data points based on temporal-spatial method (m/s) | |
| Roll angle (deg) | |
| Pitch angle (deg) | |
| Current direction (deg) | |
| Actual vertical beam angle at each beam (deg) | |
| Nominal beam angle relative to vertical (deg) | |
| Mean of beam angle | |
| Estimated covariance matrix | |
| Standard deviation of along-beam velocity signal due to Doppler noise (m/s) | |
| Standard deviation of instantaneous velocity due to turbulence (m/s) | |
| Standard deviation of tilt between the measurement point and a vertical axis passing through the ADP (deg) | |
| Standard deviation of beam angle (deg) | |
| Azimuth angle of ADP (deg) | |
| Inclination angle of ADP (deg) |
Abbreviations
| ADP | Acoustic Doppler Profiler |
| AEP | Annual Energy Production |
| AIAA | American Institute of Aeronautics and Astronautics |
| IEC | International Electrotechnical Commission |
| MRV | Mean Representative current Velocity |
| TEC | Tidal Energy Converter |
| TI | Turbulence Intensity |
| TS | Technical Specification |
| TSM | temporal-spatial method |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
|---|---|---|---|---|---|---|---|
| Noise | 0.000 | 0.020 | 0.080 | 0.010 | 0.090 | 0.180 | 0.116 |
| TI | 0 | 0 | 24 | 21 | 30 | 0 | 12 |
| Misalignment | 0.00 | 0.00 | 1.00 | 0.00 | 0.70 | 0.00 | 1.00 |
| MMRV_TSM | 0.9351 | 0.9360 | 1.0026 | 1.0018 | 1.1186 | 1.0125 | 0.9775 |
| MMRV_IEC | 0.9351 | 0.9378 | 1.1495 | 1.1051 | 1.3082 | 1.1232 | 1.0501 |
| StdMRV_TSM | 0.0000 | 0.0003 | 0.0074 | 0.0064 | 0.0080 | 0.0028 | 0.0045 |
| StdMRV_IEC | 0.0000 | 0.0003 | 0.0074 | 0.0063 | 0.0078 | 0.0029 | 0.0044 |
| TSM_Error | 0.000 | 0.094 | 8.749 | 6.675 | 18.346 | 7.743 | 4.241 |
| IEC_Error | 0.000 | 0.274 | 21.445 | 16.998 | 37.312 | 18.812 | 11.504 |
| Std_TSM_Error | 0.000 | 0.031 | 0.739 | 0.638 | 0.789 | 0.283 | 0.445 |
| Std_IEC_Error% | 0.000 | 0.032 | 0.742 | 0.629 | 0.778 | 0.287 | 0.441 |
Appendix B
Appendix C

References
- Gabriel, A. Marine energy, Wave, tidal and other water current converters—Part. 200: Electricity producing tidal energy converters, Power performance assessment, IEC TS 62600-200:2013; 2013. Available online: https://www.iec.ch/dyn/www/f?p=103:23:9627634218241::::FSP_ORG_ID,FSP_LANG_ID:1316,25 (accessed on 29 May 2020).
- Roberts, A.; Thomas, B.; Sewell, P.; Khan, Z.; Balmain, S.; Gillman, J. Current tidal power technologies and their suitability for applications in coastal and marine areas. J. Ocean. Eng. Mar. Energy. 2016, 2, 227–245. [Google Scholar] [CrossRef] [Green Version]
- Alcérreca H., J.C.; Encarnacion, J.I.; Ordoñez-Sánchez, S.; Callejas-Jiménez, M.; Barroso Diez Barroso, G.; Allmark, M.; Mariño Tapia, I.; Silva Casarín, R.; O’Doherty, T.; Johnstone, C.; et al. Energy yield assessment from ocean currents in the insular shelf of Cozumel Island. J. Mar. Sci. Eng. 2019, 7, 1–18. [Google Scholar] [CrossRef] [Green Version]
- González C., J.A.; Muste, M. Framework for estimating uncertainty of ADCP measurements from a moving boat by standardized uncertainty analysis. J. Hydraul. Eng. 2007, 133, 1390–1410. [CrossRef]
- Nystrom, E.A.; Oberg, K.A.; Rehmann, C.R. Measurement of Turbulence with Acoustic Doppler Current profilers—Sources of Error and Laboratory Results. In Proceedings of the Hydraulic Measurements and Experimental Methods Specialty Conference (HMEM), Estes Park, CO, USA, 28 July 2002; pp. 1–10. [Google Scholar]
- Gargett, A.E. Observing Turbulence with a Modified Acoustic Doppler Current Profiler. J. Atmos. Ocean. Technol. 1994, 11, 1592–1610. [Google Scholar] [CrossRef] [Green Version]
- Laws, N.D.; Epps, B.P. Hydrokinetic energy conversion: Technology, research, and outlook. Renew. Sustain. Energy Rev. 2016, 57, 1245–1259. [Google Scholar] [CrossRef] [Green Version]
- Muste, M.; Lee, K. WMO Project: Assessment of the Performance of Flow Measurement Instruments and Techniques. DEVELOPMENT OF THE DECISION-AID TOOL. 2012, pp. 1–45. Available online: http://www.wmo.int/pages/prog/hwrp/Flow/index.php (accessed on 26 May 2020).
- Simpson, M.R. Discharge Measurements Using a Broad-Band Acoustic Doppler Current Profiler. United States Geol. Surv: OPEN-FILE Rep. 01–1. 2001; p. 134. Available online: https://pubs.usgs.gov/of/2001/ofr0101/text.pdf (accessed on 26 May 2020).
- Kim, D.; Yu, K. Uncertainty Estimation of the ADCP Velocity Measurements from the Moving Vessel Method, (I) Development of the Framework. KSCE J. Civ. Eng. 2010, 14, 797–801. [Google Scholar] [CrossRef]
- Lu, Y.; Lueck, R. Using a Broadband ADCP in a Tidal Channel. Part I: Mean Flow and Shear. J. Atmos. Ocean. Technol. 1999, 16, 1556–1567. [Google Scholar] [CrossRef]
- Randeni, P.; Supun, A.T.; Forrest, A.L.; Cossu, R.; Leong, Z.Q.; Ranmuthugala, D. Determining the horizontal and vertical water velocity components of a turbulentwater column using the motion response of an autonomous underwater vehicle. J. Mar. Sci. Eng. 2017, 5. [Google Scholar] [CrossRef] [Green Version]
- Ott, M.W. An Improvement in the Calculation of ADCP Velocities. J. Atmos. Ocean. Technol. 2002, 98, 173. [Google Scholar] [CrossRef]
- Richard, J.; Thomson, J.; Polagye, B.; Bard, J. Method for identification of Doppler noise levels in turbulent flow measurements dedicated to tidal energy. Int. J. Mar. Energy 2013, 4, 52–64. [Google Scholar] [CrossRef]
- Mueller, D.S.; Wagner, C.R. Measuring Discharge with Acoustic Doppler Current Profilers from a Moving Boat; U.S. Geological Survey Techniques and Methods 3A–22: Eston, Virginia, 2009. [Google Scholar]
- Richmond, M.; Harding, S.; RomeroG, P. Numerical performance analysis of acoustic Doppler velocity profilers in the wake of an axial-flow marine hydrokinetic turbine. Int. J. Mar. Energy 2015, 11, 50–70. [Google Scholar] [CrossRef] [Green Version]
- Woodgate, R.A.; Holroyd, A.E. Correction of Teledyne Acoustic Doppler Current Profiler (ADCP) Bottom-Track Range Measurements for Instrument Pitch and Roll. arXiv 2011, arXiv:1110.5003. In Press. [Google Scholar]
- Frost, C.; Benson, I.; Elsäßer, B.; Starzmann, R.; Whittaker, T. Mitigating Uncertainty in Tidal Turbine Performance Characteristics from Experimental Testing. In Proceedings of the European Wave and Tidal Energy Conference, Cork, Ireland, 27 August 2017; p. 936(1–10). [Google Scholar]
- Crossley, G.; Alexandre, A.; Parkinson, S.; Day, A.H.; Smith, H.C.M.; Ingram, D.M. Quantifying uncertainty in acoustic measurements of tidal flows using a ‘Virtual’ Doppler Current Profiler. Ocean. Eng. 2017, 137, 404–416. [Google Scholar] [CrossRef] [Green Version]
- Sellar, B.G.; Wakelam, G.; Sutherland, D.R.J.; Ingram, D.M.; Venugopal, V. Characterisation of tidal flows at the european marine energy centre in the absence of ocean waves. Energies 2018, 11, 1–23. [Google Scholar] [CrossRef] [Green Version]
- Teledyne RD Instruments Acoustic Doppler Current Profiler Principles of Operation A Practical Primer. 2011, Volume 00. Available online: https://www.comm-tec.com/Docs/Manuali/RDI/BBPRIME.pdf (accessed on 26 May 2020).
- Garcia, N.P.; Kyozuka, Y. Analysis of turbulence and extreme current velocity values in a tidal channel. J. Mar. Sci. Technol. 2018, 24, 659–672. [Google Scholar] [CrossRef]
- Blackmore, T.; Batten, W.M.J.; Bahaj, A.S. Influence of turbulence on the wake of a marine current turbine simulator. Proc. R. Soc. A Math. Phys. Eng. Sci. 2014, 470, 2170–2187. [Google Scholar] [CrossRef] [Green Version]
- Nikora, V.I.; Goring, D.G. ADV MEASUREMENTS OF TURBULENCE: Can We Improve Their Interpretation? Hydraul. Eng. 1998, 124, 630–634. [Google Scholar] [CrossRef]
- SonTek Acoustic Doppler Profiler (ADP®) Principles of Operation. 2000. Available online: https://www.sontek.com/media/pdfs/adp-brochure.pdf (accessed on 26 May 2020).
- Lyon, V.; Wosnik, M. Spatio-Temporal Resolution of Different Flow Measurement Techniques for Marine Renewable Energy Applications. Proc. 2nd Mar. Energy Technol. Symp. METS2014 2014. Available online: https://vtechworks.lib.vt.edu/handle/10919/49225 (accessed on 26 May 2020).
- Thomson, J.; Durgesh, V.; Richmond, M.C. Measurements of Turbulence at Two Tidal Energy Sites in Puget Sound, WA. IEEE J. Ocean. Eng. 2012, 37, 363–374. [Google Scholar] [CrossRef]
- David, M. Lane Variance Sum Law. Available online: http://onlinestatbook.com/2/summarizing_distributions/variance_sum_law.html (accessed on 4 June 2019).








| Currents Characteristics | ADP Configurations | ||
|---|---|---|---|
| 1.0 m/s | Blanking Distance | 1.0 m | |
| Power law Coefficient, | 7 | Height above sea bed | 0.75 m |
| Water Depth, | 40.0 m | ADP beam angle, θ | 20° |
| Current Direction | 45° | Number of beams | 4 |
| - | - | Bin size | 1.0 m |
| Sampling Duration | 600s | - | - |
| Frequency of the Sample | 2Hz | - | - |
| Source of Uncertainty | Starting Value | Ending Value | Step Size |
|---|---|---|---|
| 0° | 10° | 0.5° | |
| 0.0 m/s | 0.3 m/s | 0.01 m/s | |
| . | 0 m/s | 0.11 m/s | 0.01 m/s |
| 0° | 1° | 0.05° |
| Bin | Bin1 | Bin2 | Bin3 | Bin4 | Bin5 | Bin6 | Bin7 |
|---|---|---|---|---|---|---|---|
| Bin1 | 1 | 0.4 | 0.25 | 0.2 | 0.15 | 0.1 | 0.05 |
| Bin2 | 1 | 0.4 | 0.25 | 0.2 | 0.15 | 0.1 | |
| Bin3 | 1 | 0.4 | 0.25 | 0.2 | 0.15 | ||
| Bin4 | 1 | 0.4 | 0.25 | 0.2 | |||
| Bin5 | 1 | 0.4 | 0.25 | ||||
| Bin6 | 1 | 0.4 | |||||
| Bin7 | 1 |
| Sources of Uncertainty | Noise | TI | Tilt | Misalignment | ||||
|---|---|---|---|---|---|---|---|---|
| TSM | IEC | TSM | IEC | TSM | IEC | TSM | IEC | |
| Noise | 1.000 | 1.000 | −0.153 | −0.208 | −0.069 | −0.097 | 0.004 | 0.006 |
| TI | - | - | 1.000 | 1.000 | 0.334 | 0.317 | −0.090 | −0.064 |
| Tilt | - | - | - | - | 1.000 | 1.000 | 0.118 | 0.077 |
| Misalignment | - | - | - | - | - | - | 1.000 | 1.000 |
| Case | (m/s) | TI % | (Deg) | Percentage Errors of Means of MRV (m/s) | Std of MRV Based on Monte-Carlo Simulations (m/s) | Std of Combined Error of MRV Based on Variance Sum Law (m/s) | |||
|---|---|---|---|---|---|---|---|---|---|
| IEC | TSM | IEC | TSM | IEC | TSM | ||||
| True | 0.00 | 0 | 0.0 | 0.000 | 0.000 | 0.00000 | 0.00000 | 0.00000 | 0.00000 |
| Best | 0.05 | 9 | 4.0 | 0.0447 | 0.0185 | 0.00333 | 0.00333 | 0.00326 | 0.00323 |
| Moderate | 0.10 | 15 | 3.6 | 0.131 | 0.048 | 0.00500 | 0.00520 | 0.00482 | 0.00508 |
| Worst | 0.11 | 23 | 0.5 | 0.329 | 0.157 | 0.00680 | 0.00680 | 0.00710 | 0.00692 |
(m/s) | TI% | (Deg) | Bias in MRV % | |
|---|---|---|---|---|
| IEC | TSM | |||
| 0.01 | 7 | 3.0 | 2.705 | 0.896 |
| 0.03 | 5 | 5.0 | 0.299 | 1.690 |
| 0.07 | 1 | 5.0 | 1.651 | 0.128 |
| 0.06 | 10 | 7.0 | 4.648 | 0.492 |
| 0.10 | 3 | 4.0 | 4.375 | 0.235 |
(m/s) | TI% | (Deg) | Bias in MRV % | |
|---|---|---|---|---|
| IEC | TSM | |||
| 0.11 | 5 | 5.0 | 7.452 | 2.636 |
| 0.15 | 5 | 5.0 | 12.387 | 4.686 |
| 0.11 | 10 | 5.0 | 10.462 | 3.862 |
| 0.15 | 10 | 5.0 | 15.238 | 6.002 |
| 0.11 | 30 | 5.0 | 38.212 | 18.969 |
| 0.15 | 30 | 5.0 | 41.744 | 21.171 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rathnayake, U.; Folley, M.; Gunawardane, S.D.G.S.P.; Frost, C. Investigation of the Error of Mean Representative Current Velocity Based on the Method of Bins for Tidal Turbines Using ADP Data. J. Mar. Sci. Eng. 2020, 8, 390. https://doi.org/10.3390/jmse8060390
Rathnayake U, Folley M, Gunawardane SDGSP, Frost C. Investigation of the Error of Mean Representative Current Velocity Based on the Method of Bins for Tidal Turbines Using ADP Data. Journal of Marine Science and Engineering. 2020; 8(6):390. https://doi.org/10.3390/jmse8060390
Chicago/Turabian StyleRathnayake, Udara, Matt Folley, S.D.G.S.P. Gunawardane, and Carwyn Frost. 2020. "Investigation of the Error of Mean Representative Current Velocity Based on the Method of Bins for Tidal Turbines Using ADP Data" Journal of Marine Science and Engineering 8, no. 6: 390. https://doi.org/10.3390/jmse8060390