
Abstract
In this paper we investigate rods made of nonlinearly elastic, composite–materials that feature a micro-heterogeneous prestrain that oscillates (locally periodic) on a scale that is small compared to the length of the rod. As a main result we derive a homogenized bending–torsion theory for rods as \(\Gamma \)-limit from 3D nonlinear elasticity by simultaneous homogenization and dimension reduction under the assumption that the prestrain is of the order of the diameter of the rod. The limit model features a spontaneous curvature–torsion tensor that captures the macroscopic effect of the micro-heterogeneous prestrain. We devise a formula that allows to compute the spontaneous curvature–torsion tensor by means of a weighted average of the given prestrain. The weight in the average depends on the geometry of the composite and invokes correctors that are defined with help of boundary value problems for the system of linear elasticity. The definition of the correctors depends on a relative scaling parameter \(\gamma \), which monitors the ratio between the diameter of the rod and the period of the composite’s microstructure. We observe an interesting size-effect: For the same prestrain a transition from flat minimizers to curved minimizers occurs by just changing the value of \(\gamma \). Moreover, in the paper we analytically investigate the microstructure-properties relation in the case of isotropic, layered composites, and consider applications to nematic liquid–crystal–elastomer rods and shape programming.
Similar content being viewed by others

1 Introduction
Motivation
Residual stress can have a tremendous effect on the mechanical behavior of slender elastic structures: Equilibrium states of elastic thin films and rods with residual stresses often have a complex shape in equilibrium, and may feature wrinkling and symmetry breaking. Many natural and synthetic materials feature residual stresses due to different physical principles, e.g., growth of soft tissues [6, 13], swelling and de-swelling in polymer gels [24], thermo-mechanical coupling in nematic liquid crystal elastomers [61], and thermal expansion in production processes. These mechanisms may be triggered by different stimuli (such as temperature, light, and humidity), and are exploited in the design of active thin structures—elastic structures that are capable to change from an initially flat state into a 3D “programmed” configuration in response to external stimuli, see [26] and [56] for a recent review on shape shifting flat soft matter. Modeling of such structures, requires (next to a description of the stimuli process) a good understanding of the highly nonlinear relation between residual stresses and the geometry of the equilibrium shape. Although intensively studied, no satisfying understanding of this relation has been obtained so far. This is especially the case for composite materials, where material properties and residual stresses feature microstructure—a situation that is relevant for future applications, since “Shape-changing materials offer a powerful tool for the incorporation of sophisticated planar micro- and nano-fabrication techniques in 3D constructs” as pointed out in [56].
Overview of Results
In this paper we investigate rods made of nonlinearly elastic, composite–materials that feature a micro-heterogeneous prestrain (or residual stress) that oscillates (locally periodic) on a scale that is small compared to the length of the rod. Our starting point is the energy functional of \(3D\)-nonlinear elasticity with a cylindrical reference domain \(\Omega _{h}=(0,\ell )\times hS\subset \mathbb{R}^{3}\):
It depends on two small parameters \(h\) and \(\varepsilon \) (describing the thickness of the rod and the period of the composite), and describes prestrain with help of a tensor field \(A_{\varepsilon ,h}\), see Sect. 2.1 for the continuum–mechanical interpretation. We suppose \(W_{\varepsilon }\) to describe a non-degenerate, nonlinear material with stress–free reference state. Moreover, we assume that the amplitude of the prestrain is comparable to the diameter of the rod, i.e., \(A_{\varepsilon ,h}=\operatorname{Id}+O(h)\) so that \(A_{\varepsilon ,h}^{-1}\approx \operatorname{Id}+B_{\varepsilon ,h}\) with a tensor field \(B_{\varepsilon ,h}\) that is uniformly bounded in \(\varepsilon \) and \(h\). We suppose that both, the prestrain tensor \(B_{\varepsilon ,h}\) and the elasticity tensor \(\mathbb{L}_{\varepsilon }\) (obtained by linearization of \(W_{\varepsilon }\) at the identity) converge in a two-scale sense, see Sect. 2.2 for the precise definition.
As a main result (see Theorem 2.7) we derive the \(\Gamma \)-limit as \((\varepsilon ,h)\downarrow 0\) of (1) in the bending regime. In this simultaneous homogenization and dimension reduction limit, we obtain a homogenized bending–torsion theory for rods that features a spontaneous curvature–torsion tensor \(K_{\mathrm{eff}}:(0,\ell )\to \operatorname{Skew}(3)\). It captures the macroscopic effect of the micro-heterogeneous prestrain:
where bending and torsion of the rod is described by the isometry \(u\in W^{2,2}_{\mathrm{iso}}((0,\ell ),\mathbb{R}^{3})\) and an attached orthonormal frame \(R\in W^{1,2}((0,\ell );\operatorname{SO}(3))\), \(Re_{1}=\partial _{1} u\). The elastic moduli of the rod are described by the quadratic form \(Q_{\mathrm{hom}}\). It is positive definite on skew symmetric matrices and can be computed by a linear relaxation and homogenization formula from \(\mathbb{L}_{\varepsilon }\)—the fourth order elasticity tensor obtained by linearizing \(W_{\varepsilon }\) at identity. While it is difficult to study energy minimizers of (1) directly, energy minimizers of (2) can easily be obtained by integrating the spontaneous curvature–torsion field \(K_{\mathrm{eff}}\). It turns out that \(K_{\mathrm{eff}}\) depends on the two-scale limit of \(\mathbb{L}_{\varepsilon }\) (nonlinearly) and on \(B_{\varepsilon ,h}\) (linearly). In addition, we observe that both \(Q_{\mathrm{hom}}\) and \(K_{\mathrm{eff}}\) depend on the relative–scaling parameter \(\gamma =\lim _{(\varepsilon ,h)\downarrow 0}\frac{h}{\varepsilon }\).
Next to the \(\Gamma \)-convergence result, we introduce an effective scheme to evaluate \(Q_{\mathrm{hom}}\) and \(K_{\mathrm{eff}}\) which invokes the definition of suitable correctors that are characterized by corrector equations that essentially come in form of boundary value problems for the system of linear elasticity, see Proposition 3.1. The spontaneous curvature–torsion tensor \(K_{\mathrm{eff}}\) is obtained as weighted average of the prescribed prestrain tensor with weights given by the correctors. For isotropic composites with a laterally layered microstructure, we can solve the corrector equations by hand and we obtain explicit formulas for the \(Q_{\mathrm{hom}}\) and \(K_{\mathrm{eff}}\), see Lemma 4.1. We observe a significant qualitative and quantitative dependence of \(K_{\mathrm{eff}}\) on the relative–scaling parameter \(\gamma \). In particular, we device an example of a prestrain that yields a transition from a straight minimizer (\(K_{\mathrm{eff}}\equiv 0\)) to a curved minimizers (\(K_{\mathrm{eff}}\neq 0\)) by only changing the value of \(\gamma \), see Sect. 4.2. Moreover, we briefly discuss applications to nematic liquid crystal elastomers in Sect. 4.3, and shape programming in Sect. 4.4.
Survey of the Literature
The derivation of mechanical models for rods has a long history. For modeling based on equilibria of forces or conservation of momentum, and derivations via formal asymptotic expansions or based on the assumption of a kinematic ansatz we refer the reader to [4, 5, 9, 39]. In contrast to these works, we take the perspective of energy minimization, and our result is an ansatz-free derivation that is based on the \(\Gamma \)-convergence methods developed by Friesecke, James & Müller in [17], in particular the geometric rigidity estimate. If we replace in (1) the prestrain tensor \(A_{\varepsilon ,h}\) by the identity matrix, then we recover a standard 3D nonlinear elasticity model without prestrain, i.e., with a stress–free reference configuration. In that case the limit \(h\downarrow 0\) with \(\varepsilon >0\) fixed, corresponds to a dimension reduction problem (without homogenization) studied by Mora & Müller in [40] where for the first time a bending–torsion theory for inextensible rods has been derived via \(\Gamma \)-convergence. On the other hand, the limit \((h,\varepsilon )\downarrow 0\) corresponds to simultaneous homogenization and dimension reduction and is studied by the second author in [42, 43], see also [21, 44, 45, 58] where the same problem for plates is considered, see also [38]. First results that combine dimension reduction in the presence of a prestrain are due to Schmidt: In [51, 52] prestrained bending plates are obtained from 3D nonlinear elasticity; see also [33] on the derivation of a model for prestrained von Kármán plates, and [1] where applications to models for nematic liquid crystal elastomers are studied. Our result can be viewed as a combination of Schmidt’s work with [42, 43]. We note that a simplified version of our main result is announced in the second author’s thesis [42] (together with a rough sketch of the proof). Recently, the derivation of prestrained bilayer rods has been investigated by Kohn & O’Brien [27] and Cicalese, Ruf & Solombrino [11]. In these interesting works not only energy minimizers are studied, but also the convergence of critical points is established and a comparison with experiments [53] is discussed. Another interesting direction of active research on related topics are the derivation and analysis of ribbons, e.g., [2, 15, 16].
In the results discussed so far the prestrain (if present) is assumed to be infinitesimally small. In the last decade, dimension reduction for finite prestrain (yet smoothly varying on a macroscopic scale) has been studied in the framework of non-Euclidean elasticity theory [14], e.g., [8, 29, 31, 33, 35] for the derivation of non-Euclidean theories for rods and plates. Rods and shells with nontrivially curved reference configuration lead to similar models when being pulled back to a flat reference configuration (cf. Remark 3 below), e.g., see [22, 23, 50, 57] for shells. We refer to [7] for a recent review on numerical simulation methods for rods and plate models.
Structure of the Paper
We introduce the general framework in Sect. 2. In particular, we explain the modeling of prestrained composites (based on a multiplicative decomposition of the strain) in Sect. 2.1. The 3D model and its limit are described in Sects. 2.2 and 2.3. In Sect. 2.4 we present an abstract definition of the homogenization and averaging formulas that determine \(Q_{\mathrm{hom}}\) and \(K_{\mathrm{eff}}\). In Proposition 3.1 in Sect. 3 we describe the effective evaluation scheme for these formulas. It is based on the notion of suitable correctors. Eventually, in Sect. 4 we discuss various applications of the theory to isotropic material for which the correctors, homogenization-, and averaging formulas can be evaluated by hand. All proofs are contained in Sect. 5.
1.1 Notation
-
\(e_{1},e_{2},e_{3}\) denotes the standard basis of \(\mathbb{R}^{3}\).
-
Given \(a,b\in \mathbb{R}^{d}\) we write \(a\otimes b\) to denote the unique matrix in \(\mathbb{R}^{d\times d}\) given by \((a\otimes b)c=(b\cdot c)a\) for all \(c\in \mathbb{R}^{d}\).
-
We write \(\operatorname{Sym}(d)\), \(\operatorname{Skew}(d)\), and \(\operatorname{SO}(d)\) for the space of symmetric, skew-symmetric, and rotation matrices in \(\mathbb{R}^{d\times d}\). We denote the identity matrix by \(\operatorname{Id}\).
-
We decompose \(x=(x_{1},\bar{x})\in \mathbb{R}^{3}\) into the in-plane component \(x_{1}:=x\cdot e_{1}\) and the out-of-plane components \(\bar{x}:=(x_{2},x_{3}):=(x\cdot e_{2},x\cdot e_{3})\).
-
For all \(x\in \mathbb{R}^{3}\) we set \({\bar{\boldsymbol{x}}}(x):=\sum _{i=2,3}x_{i}e_{i}\in \mathbb{R}^{3}\). We tacitly drop the argument and simply write \({\bar{\boldsymbol{x}}}\) (instead of \({\bar{\boldsymbol{x}}}(x)\)). We also use the same notation to denote the map \({\bar{\boldsymbol{x}}}:\mathbb{R}^{2}\to \mathbb{R}^{3}\), \({\bar{\boldsymbol{x}}}(\bar{x}):={\bar{\boldsymbol{x}}}((0,\bar{x}))\).
2 General Framework and Statement of Main Results
In this section we state the general framework and our main result.
2.1 A Model for Prestrain in Nonlinear Elasticity
We start by presenting a model for prestrained composites in nonlinear elasticity. We first introduce a class of stored energy functions:
Definition 2.1
(Nonlinear and linearized material law)
Let \(0<\alpha \leq \beta \), \(\rho >0\), and let \(r:[0,\infty )\to [0,\infty ]\) denote a monotone function satisfying \(\lim _{\delta \to 0}r(\delta )=0\).
-
The class \(\mathcal{W}(\alpha ,\beta ,\rho ,r)\) consists of all measurable functions \(W:\mathbb{R}^{3\times 3}\to [0,+\infty ]\) such that,
-
(W1)
\(W\) is frame indifferent: \(W(RF)=W(F)\) for all \(F\in \mathbb{R}^{3\times 3}\), \(R\in \operatorname{SO}(3)\).
-
(W2)
\(W\) is non degenerate:
$$\begin{aligned} W(F) \geq & \alpha \operatorname{dist}^{2}(F,\operatorname{SO}(3)) \qquad \text{for all $F\in \mathbb{R}^{3\times 3}$,} \\ W(F) \leq & \beta \operatorname{dist}^{2}(F,\operatorname{SO}(3)) \qquad \text{for all $F\in \mathbb{R}^{3\times 3}$ with $\operatorname{dist}^{2}(F,\operatorname{SO}(3))\leq \rho $.} \end{aligned}$$ -
(W3)
\(W\) is minimal at \(\operatorname{Id}\): \(W(\operatorname{Id})=0\).
-
(W4)
\(W\) admits a quadratic expansion at \(\operatorname{Id}\):
$$ |W(\operatorname{Id}+G)-Q(G)|\leq |G|^{2}r(|G|)\qquad \text{for all $G\in \mathbb{R}^{3\times 3}$,} $$where \(Q:\mathbb{R}^{3\times 3}\to \mathbb{R}\) is a quadratic form.
-
(W1)
-
The class \(\mathcal{Q}(\alpha ,\beta )\) consists of all quadratic forms \(Q\) on \(\mathbb{R}^{3\times 3}\) such that
$$ \forall G\in \mathbb{R}^{3\times 3}\,:\qquad \alpha | \operatorname{sym}G|^{2}\leq Q(G)\leq \beta |\operatorname{sym}G|^{2}. $$We associate with \(Q\) the fourth order tensor \(\mathbb{L}\in \text{Lin}(\mathbb{R}^{3\times 3},\mathbb{R}^{3\times 3})\) defined by the polarization identity \(\langle \mathbb{L} F,G\rangle :=\frac{1}{2}\big (Q(F+G)-Q(F)-Q(G)\big )\).
Stored energy functions of class \(\mathcal{W}(\alpha ,\beta ,\rho ,r)\) describe materials that have a stress-free reference state (cf. \((W3)\)), and that can be linearized at that state (e.g., in the sense of \(\Gamma \)-convergence, see [12, 19, 41, 42], and [47] in the presence of residual stress). The elastic moduli of the linearized model are given by the quadratic form \(Q\) in condition \((W4)\), and we have:
Lemma 2.2
(see Lemma 2.7 in [43])
Let \(W\in \mathcal{W}(\alpha ,\beta ,\rho ,r)\)and denote by \(Q\)the quadratic form in \((W4)\). Then \(Q\in \mathcal{Q}(\alpha ,\beta )\).
We describe prestrained composites with help of a multiplicative decomposition of the strain. To motivate this decomposition, we consider for a moment a composite consisting of two materials. We suppose that each of the materials can be described w.r.t. their individual stress-free reference configurations by stored energy functions \(W_{1},W_{2}\in \mathcal{W}(\alpha ,\beta ,\rho ,r)\), respectively. Let \(\Omega =\Omega _{1}\dot{\cup }\Omega _{2}\subset \mathbb{R}^{3}\) denote a common reference configuration of the composite and suppose that material–one (resp. –two) occupies the subdomain \(\Omega _{1}\) (resp. \(\Omega _{2}\)). We suppose that material–one is stress-free in the reference configuration \(\Omega _{1}\), and thus the elastic energy coming from material–one is captured by \(\int _{\Omega _{1}}W_{1}(\nabla u)\). On the other hand, we suppose that material–two is prestrained in the following sense: If we separate an (infinitesimally small) test-volume \(U\subset \Omega _{2}\) from the rest of the body, then it relaxes to a stress-free (energy minimizing) state described by an affine deformation \(x\mapsto \widetilde{A}x\) where \(\widetilde{A}\in \mathbb{R}^{3\times 3}\) is positive definite and independent of \(U\), see Fig. 1 for illustration. Thus, \(\widetilde{\Omega }:=\widetilde{A}\Omega _{2}\) defines an alternative, stress-free reference state for material–two, and the elastic energy of a deformation \(\tilde{u}\) defined relative to \(\widetilde{\Omega }\) is given by \(\int _{\widetilde{\Omega }}W_{2}(\nabla \tilde{u})\,d\tilde{x}\). Since the original deformation \(u:\Omega \to \mathbb{R}^{3}\) and \(\tilde{u}\) are related by \(u(x):=\tilde{u}(\widetilde{A}x)\) (for \(x\in \Omega _{2}\)), we deduce that the energy functional on the level of \(u\) associated with material–two is given by
Hence, the energy functional for the whole composite takes the form

Schematic picture of a composite with prestrained grey phase modeled by a multiplicative decomposition of the deformation gradient with nonelastic part \(\widetilde{A}\)
This corresponds to a multiplicative decomposition \(F=F_{\mathrm{el}}A\) of the strain, where \(F\) denotes the deformation gradient, \(A\) the prestrain tensor (also called the inelastic part), and \(F_{\mathrm{el}}\) the elastic part, which is the only contribution that enters the elastic energy functional. Such a decomposition has first been introduced in the context of finite strain plasticity [25, 28, 30]. It has then been used in many different contexts, e.g., to model growth in biomechanical models [20, 49, 55], electro-chemo-mechanical properties of ionic polymers [18], nematic liquid crystal elastomers [61], or thermoelasticity [54, 60]. In these multiphysics models the inelastic part \(A=A(\theta )\) is typically parametrized by an additional field variable \(\theta \) that describes, e.g., temperature, the concentration of a substance, or a growth factor.
If the prestrain is small, then we can simplify the decomposition: Suppose that \(A=R(\operatorname{Id}-h B)\) with \(R\in \operatorname{SO}(3)\), \(B\in \mathbb{R}^{3\times 3}\), and \(h>0\). Then for \(h\ll 1\), \(A\) can be inverted by the Neumann Series \(A^{-1}=\Big (\sum _{k=0}^{\infty }(hB)^{k}\Big )R^{-1}=( \operatorname{Id}+hB)R^{-1}+O(h^{2})\). Moreover, \(\det (A)=\det (\operatorname{Id}-hB)=1+O(h)\). Hence, we arrive at an energy functional of the form \(\int _{\Omega }W\Big (x,\nabla u(x)(\operatorname{Id}+hB(x))\Big )\,dx\) with \(W(x,\cdot )\in \mathcal{W}(\alpha ,\beta ,\rho ,r)\) and a tensor \(B(x)\in \mathbb{R}^{3\times 3}\). The functional describes (up to an error of order smaller than \(h^{2}\)) a composite material with heterogeneous prestrain \((\operatorname{Id}-hB(\cdot ))\).
2.2 The Three-Dimensional Model
Let \(S\subset \mathbb{R}^{2}\) be a Lipschitz domain (open, bounded and connected)—the cross-section of the rod. We may assume without loss of generality that
(this can always be achieved by applying a rigid motion). Set \(\omega :=(0,\ell )\). We denote by \(\Omega _{h}:=\omega \times hS\) the reference configuration of the rod with thickness \(h>0\). For our purpose it is convenient to describe the deformation w.r.t. the rescaled reference domain \(\Omega :=\omega \times S\), and thus consider for \(u:\Omega \to \mathbb{R}^{3}\) the scaled deformation gradient,
Rescaling (1) and assuming that the prestrain takes the form \(A_{\varepsilon ,h}=(\operatorname{Id}+hB_{\varepsilon ,h})^{-1}\) yields an energy functional of the form \(\mathcal{I}^{\varepsilon ,h}:L^{2}(\Omega )\to [0,+\infty ]\),
This parametrized energy functional is the starting point of our derivation. We make the following assumption on the material law:
Assumption 2.3
(Material law)
Let \(\alpha ,\beta ,\rho ,r\) be fixed (as in Definition 2.1). Let \(W_{\varepsilon }:\Omega \to [0,+\infty ]\) be a sequence of Borel-functions such that,
-
(i)
\(W_{\varepsilon }(x,\cdot )\in \mathcal{W}(\alpha ,\beta ,\rho ,r)\) for almost every \(x\in \Omega \) and for every \(\varepsilon >0\).
We suppose that there exists \(Q:\Omega \times \mathbb{R}\times \mathbb{R}^{3\times 3}\to \mathbb{R}\) such that
-
(ii)
\(Q(x_{1},\bar{x},y,\cdot )\) is a quadratic form that is piecewise continuous in \(x_{1}\) and periodic in \(y\). More precisely,
-
(a)
\(Q(x,y,\cdot )\in \mathcal{Q}(\alpha ,\beta )\) for a.e. \(x\in \Omega \), \(y\in \mathbb{R}\),
-
(b)
\(Q(\cdot ,G)\) is \(\mathcal{B}(\omega )\otimes \mathcal{L}(S\times \mathbb{R})\)-measurable for all \(G\in \mathbb{R}^{3\times 3}\),
-
(c)
The fourth order tensor \(\mathbb{L}=\mathbb{L}(x_{1},\bar{x}, y)\) associated with \(Q\) (cf. Definition 2.1) satisfies
$$ \omega \ni x_{1}\mapsto \mathbb{L}(x_{1},\cdot )\in L^{\infty }(S\times \mathbb{R};\text{Lin}(\mathbb{R}^{3\times 3};\mathbb{R}^{3\times 3})) \text{ is piecewise continuous.} $$ -
(d)
\(y\mapsto Q(x,y,G)\) is periodic for a.e. \(x\in \Omega \) and \(G\in \mathbb{R}^{3\times 3}\).
-
(a)
-
(iii)
The quadratic expansion at identity \(Q_{\varepsilon }(x,\cdot )\) of \(W_{\varepsilon }(x,\cdot )\) (cf. \((W4)\)) satisfies
$$ \limsup _{\varepsilon \to 0}\mathop{\operatorname{ess\,sup}}_{x\in \Omega }\max _{{\scriptstyle G\in \mathbb{R}^{3\times 3}\atop\scriptstyle |G|=1}}|Q_{\varepsilon }(x,G)-Q(x,\tfrac{x_{1}}{\varepsilon },G)|=0. $$
Regarding the prestrain, we suppose that \(B_{\varepsilon ,h}\) is locally periodic. Our precise assumption on \(B_{\varepsilon ,h}\) involves the notion of two-scale convergence in a variant for slender domains [42, 43] (see [3, 46] for the original definition of two-scale convergence). Since this variant of two-scale convergence is sensitive to the relative scaling between \(h\) and \(\varepsilon \), we introduce a parameter \(\gamma \in [0,\infty ]\) describing the relative scaling of \(h\) and \(\varepsilon \).
Assumption 2.4
(Relative scaling of \(h\) and \(\varepsilon \))
We suppose that there exists \(\gamma \in [0,\infty ]\) and a monotone function \(\varepsilon :(0,\infty )\to (0,\infty )\) such that \(\lim _{h\downarrow 0}\varepsilon (h)=0\) and \(\lim _{h\downarrow 0}\frac{h}{\varepsilon (h)}=\gamma \).
Definition 2.5
(Two-scale convergence)
Let \(Y:=[0,1)\) and denote by \(\mathcal{Y}:=\mathbb{R}/Y\) the one-dimensional torus. We say a sequence \((g^{h})\subset L^{p}(\Omega )\), \(p\in [1,\infty )\), weakly two-scale converges in \(L^{p}\) to a function \(g\in L^{p}(\Omega \times \mathcal{Y})\) as \(h\to 0\), if \((g^{h})\) is bounded in \(L^{p}(\Omega )\) and
where \(h\mapsto \varepsilon (h)\) is as in Assumption 2.4. We say \((g^{h})\) strongly two-scale converges to \(g\) if additionally \(\|g^{h}\|_{L^{p}(\Omega )}\to \|g\|_{L^{p}(\Omega \times Y)}\). We write \(g^{h}\stackrel{2}{\rightharpoonup } g\) in \(L^{p}\) (resp. \(g^{h} \stackrel{2}{\longrightarrow } g\)) for weak (resp. strong) two-scale convergence in \(L^{p}\).
Remark 1
Note that this notion of two-scale convergence changes if we change the parameter \(\gamma \). A prototypical example of a strongly two-scale convergent sequence is as follows: Let \(g\in L^{2}(\Omega ;C(\mathcal{Y}))\), then \(g^{h}(x):=g(x,\frac{x_{1}}{\varepsilon (h)})\) strongly two-scale converges in \(L^{2}\) to \(g\).
Assumption 2.6
(Prestrain)
We suppose that there exists \(B\in L^{2}(\Omega \times \mathcal{Y},\mathbb{R}^{3\times 3})\) such that
2.3 Limiting Model and \(\Gamma \)-Convergence
Under the assumptions above, we can pass to the \(\Gamma \)-limit of \(\mathcal{I}^{\varepsilon ,h}\) as \((\varepsilon ,h)=(\varepsilon (h),h)\to 0\). We obtain as a limit a functional defined on the set \(\mathcal{A}\) of all deformations of the rod that describe (length-preserving) bending- and twisting-deformations, and an infinitesimal stretch:
The \(\Gamma \)-limit is given by \(\mathcal{I}:\mathcal{A}\to [0,\infty )\),
where \(Q_{\mathrm{hom}}\) (the homogenized elastic moduli), \(K_{\mathrm{eff}}\) (the spontaneous curvature–torsion tensor), \(a_{\mathrm{eff}}\) (the spontaneous infinitesimal stretch), and \(m\geq 0\) (the incompatibility of the prestrain) are quantities that only depend on the linearized material law \(Q\), the prestrain \(B\), the geometry of the cross-section \(S\), and the scale ratio \(\gamma \); in particular,
-
\(m\geq 0\) is a constant given in Definition 2.11 below,
-
\(Q_{\mathrm{hom}}:\omega \times \operatorname{Skew}(3)\times \mathbb{R} \to \mathbb{R}\) is a positive–definite quadratic form given by the homogenization formula of Definition 2.8 below,
-
\(K_{\mathrm{eff}}\in L^{2}(\omega ;\operatorname{Skew}(3))\) and \(a_{\mathrm{eff}}\in L^{2}(\omega )\) are given by the averaging formula of Definition 2.11 below.
Our main result establishes \(\Gamma \)-convergence of \(\mathcal{I}^{\varepsilon (h),h}\) to ℐ:
Theorem 2.7
(\(\Gamma \)-convergence)
Suppose Assumptions 2.3– 2.6are satisfied. For \(u\in H^{1}(\Omega ;\mathbb{R}^{3})\)denote by
the (scaled) nonlinear strain tensor. Then:
-
(a)
(Compactness). Let \((u^{h})\subset L^{2}(\Omega ;\mathbb{R}^{3})\)be a sequences with equibounded energy, i.e.,
$$ \limsup _{h\to 0}\mathcal{I}^{\varepsilon (h),h}(u^{h})< \infty . $$(9)Then there exists \((u,R,a)\in \mathcal{A}\)and a subsequence (not relabeled) such that
(10)(11) -
(b)
(Lower bound). Let \((u^{h})\subset L^{2}(\Omega ;\mathbb{R}^{3})\)be a sequence that converges to some \((u,R,a)\in \mathcal{A}\)in the sense of (10) and (11). Then
$$ \liminf _{h\to 0} \mathcal{I}^{\varepsilon (h),h}(u^{h})\geq \mathcal{I}(u,R,a). $$ -
(c)
(Recovery sequence). For any \((u,R,a)\in \mathcal{A}\)there exists a sequence \((u^{h})\subset L^{2}(\Omega ;\mathbb{R}^{3})\)converging to \((u,R,a)\)in the sense of in the sense of (10) and (11) such that
$$ \lim _{h\to 0}\mathcal{I}^{\varepsilon (h),h}(u^{h})= \mathcal{I}(u,R,a). $$
(For the proof see Sect. 5.1.)
Remark 2
Theorem 2.7 also yields a compactness and \(\Gamma \)-convergence result towards a (more conventional) pure bending–torsion model. Indeed, by part (a) of Theorem 2.7 every sequence with equibounded energy satisfies (10) for some rod-deformation \((u,R)\) satisfying (6). Furthermore, by minimizing over \(a\in L^{2}(\omega )\) the statements of the parts (b) and (c) in Theorem 2.7 hold with \((u,R,a)\) and \(\mathcal{I}(u,R,a)\) replaced by \((u,R)\) and \({\mathcal{I}}'(u,R):=\inf _{a\in L^{2}(\omega )}\mathcal{I}(u,R,a)\) (see Remark 6 below for a more explicit characterization of \(\mathcal{I}'\)).
Remark 3
In Theorem 2.7, we assume that the prestrain is of order \(\sim h\) (see (4)), the thickness of the rod. While this assumption is often used, e.g., in [11, 27, 51], it is important and interesting to consider more general prestrains of order \(\sim h^{\alpha }\) with \(\alpha \in [0,\infty )\). We expect that similar methods as in the present work can be used for \(\alpha =2\) to derive a homogenized von Karman like rod model (see [33] for related result in case of plates and without homogenization, see also [34] for \(\alpha \in (1,2)\)). In general, we expect that the type of limiting model does not only depend on \(\alpha \) but also on other properties of the prestrain. Indeed, in a situation without homogenization it is shown in [8, 36] that bending and von Karman type plate models arise in the case \(\alpha =0\) depending on the geometry of the prestrain (see also [37] for related results in the case of rods and [31, 32] for recent results for plates and shells beyond the von Karman regime). It is an interesting question if these results are stable with respect to (small) rapidly oscillating perturbations.
2.4 Homogenization- and Averaging Formulas
The definitions of \(Q_{\mathrm{hom}}\), \(K_{\mathrm{eff}}\), and \(m\) rely on the two-scale structure of limiting strains. To motivate the upcoming formulas, we recall a two-scale compactness statement for the nonlinear strain, see [43, Theorem 3.5] (and also Proposition 5.1 below): Suppose \((u_{h})\) is a sequence with equibounded energy (cf. (9)) with limit \((u,R,a)\in \mathcal{A}\) (cf. (10), (11)), then (up to a subsequence) the associated scaled nonlinear strain tensors \({\boldsymbol{\mathrm{E}}}_{h}(u_{h})\) weakly two-scale converge in \(L^{2}\) to a limiting strain \(E:\Omega \times \mathcal{Y}\to \operatorname{Sym}(3)\) of the form
Above, \(\chi \in L^{2}(\omega ;\boldsymbol{H}^{\gamma }_{\mathrm{rel}})\) where \({\boldsymbol{H}}_{\operatorname{rel}}^{\gamma }\subset L^{2}(S\times \mathcal{Y};\operatorname{Sym}(3))\) is defined as follows:
Note that on the right-hand side in (12) the first and second term are determined by the limiting deformation \((u,R,a)\). Only the third term \(\chi \)—the only term that involves the fast variable \(y\in \mathcal{Y}\)—depends on the chosen subsequence. We call it the strain corrector. For the following discussion it is convenient to define for \((K,a)\in \operatorname{Skew}(3)\times \mathbb{R}\) the affine map
and to introduce the two-scale strain space
Since \(R^{t}\partial _{1}R\) is skew-symmetric (almost surely) for \((u,R,a)\in \mathcal{A}\), the limiting strain of (12) satisfies \(E\in L^{2}(\omega ;\boldsymbol{H}^{\gamma })\).
Remark 4
To motivate the decomposition (12) and (13), we briefly show that with help of a (corrected) Cosserat-Ansatz precisely that decomposition for the nonlinear strain can be recovered in the limit. For simplicity we suppose \(\frac{h}{\varepsilon (h)}=\gamma \in (0,\infty )\) for all \(h>0\). For a fixed rod-configuration \((u,R,a)\), we consider
with \(\overline{u}(x_{1}):=\int _{0}^{x_{1}}(1+ha(s))R(s)e_{1}\,ds\) and \(\hat{\phi }\in C^{\infty }(\Omega \times \mathcal{Y},\mathbb{R}^{3})\). A direct computation yields
and thus
in agreement with (12) and (13) (in the case \(\gamma \in (0,\infty )\)). This \(\hat{\phi }\) is thus an infinitesimal displacement that corrects the standard Cosserat deformation by introducing oscillations on scale \(\varepsilon (h)\), while \(a\) is an infinitesimal stretch in the longitudinal direction.
Formula for \(Q_{\mathrm{hom}}\)
As in [43] the homogenized quadratic form \(Q_{\mathrm{hom}}\) is defined by minimizing out the energy contribution coming from \(\chi \in \boldsymbol{H}^{\gamma }_{\mathrm{rel}}\):
Definition 2.8
(homogenization formula for \(Q_{\hom }\))
We define \(Q_{\mathrm{hom}}:\omega \times \operatorname{Skew}(3)\times \mathbb{R} \to [0,\infty )\) by
Remark 5
We emphasize that the definition of \(Q_{\mathrm{hom}}\) depends on the small-scale coupling \(\gamma \) via the relaxation space \(\boldsymbol{H}^{\gamma }_{\mathrm{rel}}\).
Remark 6
As already discussed in Remark 2, a pure bending–torsion model is obtained from ℐ by minimizing out the stretch variable \(a\). This can be made more explicit as follows:
where
The quadratic form \(Q_{\mathrm{hom}}'\) coincides with the homogenized quadratic form given in [43] where the case without prestrain is studied.
Formulas for \(K_{\mathrm{eff}}\) and \(a_{\mathrm{eff}}\)
We first present a “geometric” definition—an alternative “algorithmic” definition that is more practical for numerical investigations is presented in Sect. 3 below. The geometric definition invokes the following Hilbert-space structure on \(\boldsymbol{H}:=L^{2}(S\times \mathcal{Y};\operatorname{Sym}(3))\): Let \(\mathbb{L}\) denote the symmetric fourth-order tensor obtained from the quadratic form \(Q\) by polarization, and consider for \(x_{1}\in \omega \),
Since \(Q\) is positive-definite and bounded on symmetric matrices, \((\cdot ,\cdot )_{x_{1}}\) defines a scalar product on \(\boldsymbol{H}\). We write \(\|\cdot \|_{x_{1}}\) for the associated norm and note that
\(\boldsymbol{H}^{\gamma }_{\mathrm{rel}}\) and \(\boldsymbol{H}^{\gamma }\) (see (13) and (15)) are closed, linear subspaces of \((\boldsymbol{H},\|\cdot \|_{x_{1}})\). We denote by \((\boldsymbol{H}^{\gamma })^{\perp x_{1}}\subset \boldsymbol{H}\) (resp. \((\boldsymbol{H}^{\gamma }_{\mathrm{rel}})^{\perp ,x_{1}}\subset \boldsymbol{H}^{\gamma }\)) the \((\cdot ,\cdot )_{x_{1}}\)-orthogonal complement of \(\boldsymbol{H}^{\gamma }\) in \(\boldsymbol{H}\) (resp. \(\boldsymbol{H}^{\gamma }_{\mathrm{rel}}\) in \(\boldsymbol{H}^{\gamma }\)), and by \(P^{\gamma ,x_{1}}:\boldsymbol{H}\to (\boldsymbol{H}^{\gamma })^{\perp x_{1}}\) and \(P^{\gamma ,x_{1}}_{\mathrm{rel}}:\boldsymbol{H}\to (\boldsymbol{H}^{\gamma }_{ \mathrm{rel}})^{\perp x_{1}}\) the associated \((\cdot ,\cdot )_{x_{1}}\)-orthogonal projections. We thus have the orthogonal decomposition,
A direct consequence is the following observation:
Lemma 2.9
(Pythagoras)
For all \(x_{1}\in \omega \)and \(F\in \boldsymbol{H}\),
In particular, we obtain the following characterization of \(Q_{\mathrm{hom}}\):
It turns out that any \(E\in (\boldsymbol{H}^{\gamma }_{\mathrm{rel}})^{\perp x_{1}}\) admits a representation via a unique pair \((K,a)\in \operatorname{Skew}(3)\times \mathbb{R}\):
Lemma 2.10
(Representation)
For all \(x_{1}\in \omega \)the map
defines a linear isomorphism and there exists a constant \(C=C(\alpha ,\beta ,\gamma ,S)\)such that
(For the proof see Sect. 5.2.)
We denote by \(P^{\gamma ,\bullet }\) the unique bounded operator on \(L^{2}(\omega ;\boldsymbol{H})\) defined by the identity
and define \(P^{\gamma ,\bullet }_{\mathrm{rel}}\) and \({\boldsymbol{\mathrm{E}}}^{\gamma ,\bullet }\) analogously. We are now in position to define \((K_{\mathrm{eff}}(x_{1}),a_{\mathrm{eff}}(x_{1}))\) and \(m\):
Definition 2.11
(averaging formula for \(m\) and \((K_{\mathrm{eff}},a_{\mathrm{eff}})\))
We set
and define \((K_{\mathrm{eff}},a_{\mathrm{eff}})\in L^{2}(\omega ;\operatorname{Skew}(3) \times \mathbb{R})\) as the unique field such that
3 Evaluation of the Homogenization Formulas via BVPs
The definitions of \(Q_{\mathrm{hom}}\), \(K_{\mathrm{eff}}\) and \(a_{\mathrm{eff}}\) (see Definitions 2.8 and 2.11) are rather abstract. In this section we present a characterization that replaces the “abstract” operator in these definitions by boundary value problems for the system of linear elasticity on the domain \(S\times Y\). To benefit from the linearity of the map \((K,a)\mapsto (K_{\mathrm{eff}},a_{\mathrm{eff}})\), we set
and note that this defines an orthonormal basis of \(\operatorname{Skew}(3)\). Moreover, we introduce the maps \({E}^{(i)}:S\to \operatorname{Sym}(3)\),
see (14) for the definition of \({{\boldsymbol{\mathrm{E}}}}\). Note that \(\{E^{(i)}\,:\,i=1,\ldots ,4\}\) spans the macroscopic strain space. In particular, \(E^{(1)}\) corresponds to an infinitesimal stretch (in tangential direction); \(E^{(i)}\) (\(i=2,3\)) corresponds to bending in direction \(x_{i}\), and \(E^{(4)}\) corresponds to a twist.
We have the following scheme to evaluate the homogenized quantities:
Proposition 3.1
For \(x_{1}\in \omega \)we define the following objects:
-
(i)
The strain correctors \(\chi ^{(i)}(x_{1})\) (\(i=1,\ldots ,4\)) as the unique solution in \(\boldsymbol{H}^{\gamma }_{\mathrm{rel}}\)to
$$ \big(E^{(i)}+\chi ^{(i)}(x_{1}),\chi \big)_{x_{1}}=0\qquad \textit{for all }\chi \in \boldsymbol{H}^{\gamma }_{\mathrm{rel}}. $$(26) -
(ii)
The averaging matrix \(\mathbb{M}(x_{1})\in \operatorname{Sym}(4)\)as the unique matrix with entries
$$ \mathbb{M}(x_{1})_{ij}:=\big(E^{(i)}+\chi ^{(i)}(x_{1}),E^{(j)}+\chi ^{(j)}(x_{1}) \big)_{x_{1}}. $$(27) -
(iii)
The vector representation of the strain \(b(x_{1})\in \mathbb{R}^{4}\)as the unique vector with entries
$$ b(x_{1})_{i}:=\big(B(x_{1}),E^{(i)}+\chi ^{(i)}(x_{1})\big)_{x_{1}}, $$where \(B\)denotes the prestrain tensor of Assumption 2.6.
Then:
-
(a)
\(\mathbb{M}(x_{1})\)is symmetric positive definite and we have \(\frac{1}{C}\leq \mathbb{M}(x_{1})\leq C\) (in the sense of quadratic forms) for a constant \(C=C(\alpha ,\beta ,\gamma ,S)\).
-
(b)
The map \(x_{1}\mapsto \mathbb{M}(x_{1})\)is piecewise continuous.
-
(c)
For all \((K,a)\in \operatorname{Skew}(3)\times \mathbb{R}\)we have
$$ Q_{\hom }(x_{1},K,a)=k\cdot \mathbb{M}(x_{1})k\qquad \textit{where }k:= \Big(a,(K\cdot K^{(2)}),\ldots , (K\cdot K^{(4)})\Big). $$(28) -
(d)
With \(k(x_{1}):=\mathbb{M}(x_{1})^{-1}b(x_{1})\)we have the identities
$$ K_{\mathrm{eff}}(x_{1})=\sum _{i=2}^{4}k_{i}(x_{1})K^{(i)},\qquad a_{\mathrm{eff}}(x_{1})=k_{1}(x_{1}) \qquad \textit{for a.e. }x_{1}\in \omega . $$(29)
(For the proof see Sect. 5.2.)
Remark 7
(Averaging and homogenization)
The proposition shows that the spontaneous curvature–torsion tensor \(K_{\mathrm{eff}}\) and the spontaneous infinitesimal stretch \(a_{\mathrm{eff}}\) linearly depend on \(B\), and thus, the passage from \(B\) to \((K_{\mathrm{eff}},a_{\mathrm{eff}})\) can be interpreted as a spatial average with a correction that takes the micro heterogeneity of the material, the cross-section \(S\), and the scale ratio \(\gamma \) into account. This is in contrast to the relation between \(Q\) and \(Q_{\mathrm{hom}}\), which is nonlinear and given by a homogenization formula that has already been obtained in [43] where the case without prestrain is discussed. In [27, Theorem 2], a corresponding formula to (29) is derived in the case of a homogeneous material law and a non-oscillatory prestrain.
In Proposition 3.1, the strain correctors \(\chi ^{(i)}\) are defined in an intrinsic way via variational problems with the strain as the primary unknown, see, e.g., [10] for an overview of such methods. Next, we derive boundary value problems (BVP) that allow to compute (26), and to represent the strain correctors \(\chi ^{(i)}\).
Lemma 3.2
(Characterization of the strain corrector via BVP)
Fix \(x_{1}\in \omega \)and \((a,K)\in \mathbb{R}\times \operatorname{Skew}(3)\). Set \(E:={{\boldsymbol{\mathrm{E}}}}(K,a)\), and let \(\chi _{E}\in \boldsymbol{H}^{\gamma }_{\mathrm{rel}}\)be the solution to
-
(a)
Let \(\gamma \in (0,\infty )\). Set \(D^{\gamma }:={\mathrm{diag}}(1,\gamma ^{-1},\gamma ^{-1})\in \operatorname{Sym}(3)\)and \(\nabla :=(\partial _{y},\bar{\nabla })\). Then \(\chi _{E}=\operatorname{sym}\left [D^{\gamma }\nabla \phi _{E}\right ]\), where \(\phi _{E}\in H^{1}(S\times \mathcal{Y};\mathbb{R}^{3})\)denotes the unique solution to
$$ \begin{aligned} &\iint _{S\times Y}\langle \mathbb{L}(x_{1},\bar{x},y)(E+D^{\gamma }\nabla \phi _{E}),D^{\gamma }\nabla \phi \rangle =0\qquad \textit{for all }\phi \in H^{1}(S\times \mathcal{Y};\mathbb{R}^{3}), \end{aligned} $$(30)subject to
$$ \iint _{S\times Y}\phi _{E}=0\qquad \textit{and}\qquad \iint _{S\times Y} \phi _{E}\cdot \begin{pmatrix} 0 \\ x_{3} \\ -x_{2}\end{pmatrix} =0. $$(31) -
(b)
Let \(\gamma =0\). Consider the Hilbert space
$$\begin{aligned} {\mathbf{X}}^{0} :=&\Big\{ (\Psi ,\hat{\phi },\bar{\phi })\in H^{1}(\mathcal{Y}; \operatorname{Skew}(3))\times H^{1}(\mathcal{Y})\times L^{2}( \mathcal{Y};H^{1}(S;\mathbb{R}^{3})), \\ &\qquad \qquad \textit{such that }\int _{Y}\Psi =0,\quad \int _{Y} \hat{\phi }=0,\quad \int _{Y}|\int _{S}\bar{\phi }|=0\,\Big\} . \end{aligned}$$Then the map
$$ \iota ^{0}:{\mathbf{X}}^{0}\to \boldsymbol{H}^{\gamma }_{\mathrm{rel}},\qquad ( \Psi ,\hat{\phi },\bar{\phi })\mapsto {{\boldsymbol{\mathrm{E}}}}(\partial _{y} \Psi , \partial _{y}\hat{\phi })+ \operatorname{sym}\left [\left (0\,| \,\bar{\nabla }\bar{\phi }\right )\right ] $$defines an isomorphism, and we have \(\chi _{E}=\iota ^{0}(\Psi _{E},\hat{\phi }_{E},\bar{\phi }_{E})\), where \((\Psi _{E},\hat{\phi }_{E},\bar{\phi }_{E})\in {\mathbf{X}}^{0}\)denotes the unique solution to
$$ \begin{aligned} &\iint _{S\times Y}\langle \mathbb{L}(x_{1},\bar{x},y)\big(E+\iota ^{0}( \Psi _{E},\hat{\phi }_{E},\bar{\phi }_{E})\big),\,\iota ^{0}(\Psi , \hat{\phi },\bar{\phi })\rangle =0 \\ &\qquad \textit{for all }(\Psi ,\hat{\phi },\bar{\phi })\in {\mathbf{X}}^{0}. \end{aligned} $$ -
(c)
Let \(\gamma =\infty \). Consider the Hilbert space
$$\begin{aligned} {\mathbf{X}}^{\infty } :=&\Big\{ (\hat{\phi },\bar{\phi })\in L^{2}(S;H^{1}( \mathcal{Y};\mathbb{R}^{3}))\times H^{1}(S;\mathbb{R}^{3}), \\ &\qquad \qquad \textit{such that }\int _{S}|\int _{Y}\hat{\phi }|=0, \quad \int _{S}\bar{\phi }=0\,\Big\} . \end{aligned}$$Then the map
$$ \iota ^{\infty }:{\mathbf{X}}^{\infty }\to \boldsymbol{H}^{\infty }_{\mathrm{rel}}, \qquad (\hat{\phi },\bar{\phi })\mapsto \operatorname{sym}\left ( \partial _{y} \hat{\phi }\,|\,\bar{\nabla }\bar{\phi }\right ), $$defines an isomorphism, and we have \(\chi _{E}=\iota ^{\infty }(\hat{\phi }_{E},\bar{\phi }_{E})\), where \((\hat{\phi }_{E},\bar{\phi }_{E})\in {\mathbf{X}}^{\infty }\)denotes the unique solution to
$$ \begin{aligned} &\iint _{S\times Y}\langle \mathbb{L}(x_{1},\bar{x},y)\big(E+\iota ^{\infty }(\hat{\phi }_{E},\bar{\phi }_{E})\big),\,\iota ^{\infty }(\hat{\phi }, \bar{\phi })\rangle =0 \\ &\qquad \textit{for all }(\hat{\phi },\bar{\phi })\in {\mathbf{X}}^{\infty }. \end{aligned} $$
(For the proof see Sect. 5.2).
Remark 8
Condition (31) rules out (infinitesimal) translations and twisting of the crosssection. The non-degeneracy assumption (W2) combined with a suitable version of Korn’s inequality implies the unique solvability of (30) subject to (31).
4 Examples and Explicit Formulas for Isotropic Materials
In this section we restrict our analysis to isotropic materials and the extreme regimes \(h\ll \varepsilon \) and \(\varepsilon \ll h\), i.e., \(\gamma \in \{0,\infty \}\). In that case the homogenized quantities—the matrix \(\mathbb{M}\) from Proposition 3.1—can be computed by hand, see Lemma 4.1 below. We further specify the findings of Lemma 4.1 in the case of a bilayer material which was studied in the homogeneous case in [11, 27]. We observe a dramatic size effect: We give an explicit example of a prestrain \(B\) that produces zero spontaneous bending in the case \(\gamma =0\) but non-zero bending in the case \(\gamma =\infty \). Moreover, we apply Lemma 4.1 to prestrain tensors that originate from models for nematic liquid crystal elastomers and compare the results with the findings of [1, 2] in the context of ribbons. Finally, we address shape programming.
4.1 Isotropic, Laterally Periodic Composites
Throughout this section we suppose that the composite is isotropic, periodically oscillating in longitudinal direction, and constant in cross-sectional direction, i.e., we suppose that \(Q\) (cf. Assumption 2.3) is of the form
with (periodic) Lamé-constants \(\mu ,\lambda \in L^{\infty }(\mathcal{Y})\) that are (essentially) non-negative, and \(\mathop{\operatorname{ess\,inf}}_{y\in \mathbb{R}}(2\mu +\lambda )>0\). We recall the definition of some standard moduli for isotropic elastic materials:
The formulas for the elastic moduli of the effective model involve the arithmetic and harmonic mean. To shorten notation, for \(f\in L^{1}(\mathcal{Y})\) we set
Furthermore, we define the effective moduli
and note that \(\nu _{\infty }=\nu \) and \(\beta _{\infty }=\beta _{0}=\beta \) for homogeneous, isotropic materials. Next to the elastic moduli, the homogenized model depends on the geometry of the cross–section \(S\). To capture this effect, we denote by \(\varphi _{S}\in H^{1}(S)\) the unique minimizer to
satisfying \(\int _{S}\varphi _{S}=0\). Following [40, Remark 3.5], we refer to the function \(\varphi _{S}\) and the parameter \(\tau _{S}\) as the torsion function and the torsional rigidity.
The following lemma yields an explicit expression for the averaging matrix \(\mathbb{M}\) of Proposition 3.1 in terms of averages of the Lamé-constants, the torsional rigidity and the torsion function. It can be seen as an extension of the analysis in [40] and [27, Theorem 3] to periodic composites and periodic prestrain.
Lemma 4.1
(Effective properties in the isotropic case)
Let \(\gamma \in \{0,\infty \}\). Let \(\mu ,\lambda \in L^{\infty }(\mathcal{Y})\)be non-negative and satisfy \(\mathop{\operatorname{ess\,inf}}_{y\in \mathbb{R}}(2\mu +\lambda )>0\). Suppose that \(Q\) (cf. Assumption 2.3) is of the form (32). Then:
-
(i)
the strain correctors \(\chi ^{(i)}\), \(i=1,\dots ,4\)defined via (26) satisfy
$$\begin{aligned} E^{(1)}+\chi ^{(1)} =& \textstyle\begin{cases} \frac{\langle \beta \rangle _{\hom }}{\beta }\operatorname{diag}(1,- \nu ,-\nu )&\gamma =0 \\ \operatorname{diag}\left (\frac{\beta _{\infty }}{M}+2\nu _{\infty }\frac{\lambda }{M},-\nu _{\infty },-\nu _{\infty }\right )&\gamma = \infty \end{cases}\displaystyle , \end{aligned}$$(34a)$$\begin{aligned} E^{(i)}+\chi ^{(i)} =&-x_{i}\big(E^{(1)}+\chi ^{(1)}\big)\qquad \textit{for }i=2,3, \end{aligned}$$(34b)$$\begin{aligned} E^{(4)}+\chi ^{(4)} =&\frac{\langle \mu \rangle _{\operatorname{hom}}}{\mu } \begin{pmatrix} 0 & \frac{1}{2} (\partial _{2} \varphi _{S}-x_{3}) & \frac{1}{2} (\partial _{3} \varphi _{S}+x_{2}) \\ \frac{1}{2} (\partial _{2} \varphi _{S}-x_{3}) &0&0 \\ \frac{1}{2} (\partial _{3} \varphi _{S} + x_{2})&0&0 \end{pmatrix} . \end{aligned}$$(34c) -
(ii)
The matrix \(\mathbb{M}\)of Proposition 3.1satisfies
$$ \mathbb{M}={\mathrm{diag}}\left (\beta _{\gamma }\int _{S}\,d\bar{x},\ \ \beta _{\gamma }\int _{S}x_{2}^{2}\,d\bar{x},\ \ \beta _{\gamma }\int _{S}x_{3}^{2} \,d\bar{x},\ \ \langle \mu \rangle _{\mathrm{hom}}\tau _{S}\right ). $$ -
(iii)
The vector \(b\)of Proposition 3.1satisfies
$$\begin{aligned} \left ( \textstyle\begin{array}{c} b_{1} \\ b_{2} \\ b_{3} \end{array}\displaystyle \right ) =&\beta _{\gamma }\iint _{S\times Y}B_{11}(e_{1}-{ \bar{\boldsymbol{x}}}) \\ &- \textstyle\begin{cases} \displaystyle 0&\textit{for }\gamma =0 \\ \displaystyle \iint _{S\times Y}g_{\infty }(B_{22}+B_{33})(e_{1}-{ \bar{\boldsymbol{x}}})&\textit{for }\gamma =\infty \end{cases}\displaystyle , \\ b_{4} =&\langle \mu \rangle _{\operatorname{hom}}\int _{S} ( \partial _{2}\varphi _{S}-x_{3})\,\langle B_{12}+B_{21}\rangle \,+( \partial _{3}\varphi _{S}+x_{2})\,\langle B_{13}+B_{31}\rangle \,d \bar{x}, \end{aligned}$$where
$$ g_{\infty }:= 2(\mu +\lambda )\nu _{\infty }-(\beta _{\infty }+2\nu _{\infty }\lambda )\frac{\lambda }{M}. $$(35) -
(iv)
The vector \(k\)of Proposition 3.1is given by \(k_{i} =\mathbb{M}_{ii}^{-1}b_{i}\)for \(i=1,\dots ,4\), and it holds
$$ Q_{\operatorname{hom}}(K,a)=|S|\beta _{\gamma }a^{2}+\sum _{i=2}^{3} \beta _{\gamma }\int _{S} x_{i}^{2}\,d\bar{x} k_{i}^{2}+\langle \mu \rangle _{\operatorname{hom}}\tau _{S} \tau ^{2}, $$where \(a\in \mathbb{R}\)and \(K= \begin{pmatrix} 0& k_{2} & k_{3} \\ -k_{2}&0&\tau \\ -k_{3}&-\tau &0 \end{pmatrix} \).
(For the proof see Sect. 5.3.)
Remark 9
(General observations)
The qualitative dependency of the spontaneous curvature–torsion tensor
on the geometry of \(S\), the prestrain \(B\) and the material law can be summarized in the following diagram.
Geometry S | prestrain B | material law | |
|---|---|---|---|
\(\begin{pmatrix} k_{1}\\k_{2}\\k_{3}\end{pmatrix} \) | linear | \(\begin{cases} \langle B_{11}\rangle &\text{if }\gamma =0\\ \langle B_{11}\rangle , \langle g_{\infty }(B_{22}+B_{33})\rangle &\text{if }\gamma =\infty \end{cases} \) | \(\begin{cases} {\boxtimes }&\text{if }\gamma =0\\ \lambda ,\mu &\text{if }\gamma =\infty \end{cases} \) |
\(k_{4}\) | non-linear | \(e_{1}\cdot \langle \operatorname{sym}B\rangle e_{j},\,j\in \{2,3\}\) | ⊠ |
In [27, Theorem 3] the statement of Lemma 4.1 is given in the case of a homogeneous material and non-oscillatory prestrain. The values for the induced torsion \(k_{4}\) in the case \(\gamma \in \{0,\infty \}\) and for the induced stretching and bending \(k_{1},k_{2},k_{3}\) in the case \(\gamma =0\) coincides with the findings of [27] applied to the averaged prestrain \(\langle B\rangle \in L^{2}(S;\mathbb{R}^{3\times 3})\). In the case \(\gamma =\infty \) the values of \(k_{1},k_{2},k_{3}\) differ substantially from the homogeneous case. Finally, we note that \(g_{\infty }\) given in (35) satisfies \(\langle g_{\infty }\rangle =0\). In particular, for homogeneous isotropic materials, i.e., \(\lambda \) and \(\mu \) are constant, the vector \(k\) coincides in the cases \(\gamma =0\) and \(\gamma =\infty \).
Remark 10
In [43, Sect. 5], it is shown that for laterally periodic (possibly anisotropic) composites, the extreme regimes \(\gamma \in \{0,\infty \}\) correspond to taking limits sequentially: first dimension reduction (\(h\to 0\)), then homogenization (\(\varepsilon \to 0\)) for \(\gamma =0\) and in the reverse ordering for \(\gamma =\infty \). With similar arguments as in [43], the corresponding conclusion can be proven in presence of a prestrain of the form \(B_{\varepsilon ,h}(x)=B(x,\frac{x_{1}}{\varepsilon })\) and \(B\in L^{\infty }(\Omega ;C(\mathcal{Y}))\).
Notice that this is in agreement with the findings of [27]: For isotropic materials the values of \(\kappa _{i}\), \(i=1,\dots ,4\) are independent of the Lamé parameters and thus for \(\gamma =0\) homogenization after dimension reduction amounts to simply averaging. On the other hand, the 3D homogenized energy density is not isotropic in general which explains the different dependencies of \(\kappa _{i}\), \(i=1,\dots ,4\) on the material parameters
4.2 Example 1: Isotropic Bilayer with Isotropic Prestrain
Set \(S=(-1,1)^{2}\) and choose \(B=\operatorname{sgn}(x_{3})\rho (y)\operatorname{Id}\) for some \(\rho \in L^{2}(\mathcal{Y})\). Then, it is easy to check that \(b_{2}=b_{4}=0\) and thus \(k_{2}=k_{4}=0\) and
Next, we consider an isotropic two-phase composite where the first Lamé constant \(\lambda \) is constant and the shear moduli oscillates. More precisely, for given \(\vartheta \in [0,1]\) we set
and \(\lambda (y)=\lambda >0\) for all \(y\in \mathcal{Y}\), see Fig. 2.

Schematic picture of the reference cell in the example discussed in Sect. 4.2
Note that in the case \(\gamma =0\) the induced infinitesimal stretch \(k_{1}\) and bending \(k_{3}\) are affine in the volume fraction \(\vartheta \), and \(\langle \rho \rangle =0\), i.e., \(\vartheta =\frac{1}{2}\), implies \(k=0\). In the case \(\gamma =\infty \) the map \(\vartheta \mapsto k(\vartheta )\) is in general non-linear and non-monotone (see Fig. 3). Indeed, we have
Recall that for \(\vartheta =\frac{1}{2}\), we have \(\langle B\rangle =0\), but for \(\gamma =\infty \) and \(M_{1}\neq M_{2}\),

Dependency of the spontaneous curvature \(k_{3}\) (bending) on the volume fraction parameter \(\vartheta \) in the example discussed in Sect. 4.2. The map \(\vartheta \mapsto k_{3}(\vartheta )\) is linear if \(\gamma =0\) and it might be nonlinear in the case \(\gamma =\infty \) (depending on the parameters \(\mu _{1}\) and \(\mu _{2}\)). We observe a size effect, e.g., from flat, \(k_{3}=0\), to curved, \(k_{3}\neq 0\) by only changing \(\gamma \) form 0 to \(\infty \)
4.3 Example 2: Nematic Rods
Liquid crystal elastomers are solids made of liquid crystals (rod–like molecules) incorporated into a polymer network. In a nematic phase (at low temperature) the liquid crystals show an orientational order and the material features a coupling between the entropic elasticity of the polymer network and the LC-orientation. The latter leads to a thermo-mechanical coupling that can be used in the design of active thin sheets that show a complex change of shape upon thermo-mechanical (or photo-mechanical) actuation, see [62]. Following [48, 61] we describe the elastic energy of a nematic elastomer by the functional
where the so-called step-length tensor is given by
Above \(n:\Omega \to S^{2}:=\{x\in \mathbb{R}^{3}\,:\,|x|=1\}\) is a director field that describes the local orientation of the liquid crystals, and \(r\) is a scalar order parameter. In [8] a non-Euclidean bending plate model is derived via \(\Gamma \)-convergence from (36) under the assumption that the director field \(n\) is sufficiently smooth and satisfies additional structural assumptions (in particular it is assumed to be constant in the thickness direction). In [1], the authors derive a plate model from the energy (36) with director fields \(n\) that are allowed to have large variations across the thickness but with the simplifying assumption that \(r\) in (37) is replaced by \(r_{h}=1+\bar{r} h\) with \(\bar{r}\in \mathbb{R}\), where \(h\) denotes the thickness of the plate. Under this assumption, we have
Two specific choices for the director field \(n\) were studied in [1, 2] in detail for the case of plates and ribbons:
In the following, we present the spontaneous curvature–torsion vector \(k=k(n)\) for prestrains \(B(n)\) defined via (38) with director fields \(n\) corresponding to splay bend- and twist configurations. To be precise, set \(S=(-1,1)^{2}\) and consider for simplicity the case of an isotropic and homogeneous material law, that is \(Q\) (cf. Assumption 2.3) is of the form \(Q(x,y,G)=Q(G)=2\mu |\operatorname{sym}G|^{2}+\lambda ( \operatorname{trace}\ G)^{2}\) with \(\mu >0\) and \(\lambda \geq 0\).
-
(splay bend). For given \(\vartheta \in [0,\pi )\), set \(n_{\vartheta }^{\mathrm{(S)}}(x_{3}):=(\cos (\vartheta + \frac{\pi }{4} x_{3}),0,\sin (\vartheta + \frac{\pi }{4} x_{3}))^{t}\). Then,
$$\begin{aligned} k(n_{\vartheta }^{\mathrm{(S)}})=&\bar{r}(\tfrac{5}{12}+\tfrac{1}{2\pi } \cos (2\vartheta ),0, \tfrac{3}{\pi ^{2}}\sin (2\vartheta ) ,0)^{t}. \end{aligned}$$ -
(twist). For given \(\vartheta \in [0,\pi )\), set \(n_{\vartheta }^{\mathrm{(T)}}(x_{3})=(\cos (\vartheta + \frac{\pi }{4} x_{3}), \sin (\vartheta + \frac{\pi }{4} x_{3}),0)^{t}\). Then,
$$\begin{aligned} k(n_{\vartheta }^{\mathrm{(T)}})=&k(n_{\vartheta }^{\mathrm{(S)}})+ \frac{c_{S}}{\tau _{S}} \bar{r} (0,0,0,\cos (2\vartheta ))^{t}\qquad \text{where}\quad c_{S}:= \tfrac{8}{\pi ^{3}}(8\tanh (\tfrac{\pi }{2})- \pi )>0. \end{aligned}$$
(For details on the calculations, we refer to Appendix A.1.)
Let us now compare the above findings with the results in [1, 2]: In [1] the authors derive a \(2D\)-plate model from the energy (36) with \(\vartheta =\frac{\pi }{4}\). Starting from the resulting plate model a \(1D\)-ribbon model is derived in [2] by cutting out a thin strip from the plate (in a certain angle \(\theta \)) and perform a dimension reduction limit similar to [15]. The limit model is based on a non-quadratic non strictly-convex function of bending and torsion. Hence, we cannot compare the results directly but at least, up to a non-vanishing prefactor, the preferred bending-torsion \((k_{2},k_{4})\) derived above lies in the set of preferred bending-torsion given by the model in [2].
4.4 Application: Shape Programming via Isotropic Prestrain
In view of applications it is desirable to recover a given “target” spontaneous curvature–torsion tensor \(K_{\mathrm{eff}}\) (cf. Definition 2.11) by mixing simple microscopic building blocks that come in the form of parametrized microstructures depending. Below we study a specific parametrized microgeometry that is visualized in Fig. 4 and defined below. Moreover, we consider a simple isotropic prestrain. We show that we may prescribe the bending part of \(K_{\mathrm{eff}}\) by suitably choosing the parameters of the parametrized microgeometry. Since \(K_{\mathrm{eff}}\) determines (up to an additive constant) the minimizer of the functional (17) (and of (7) up to the infinitesimal stretch), the upcoming result thus allows for a “programming of the (equilibrium) shape” by designing the microstructure. Figures 5 and 6 visualize two examples illustrating the dependency between the parameters (of the microgeometry) and the equilibrium shape. To simplify the computations, we consider the following specific situation:
-
The material is isotropic and homogeneous, i.e., we assume that \(Q\) (cf. Assumption 2.3) is of the form \(Q(x,y,G)=Q(G)=2\mu |G|^{2}+\lambda ({\mathrm{trace}}\ G)^{2}\) with \(\mu >0\) and \(\lambda \geq 0\) being fixed from now on.
-
The cross-section of the rod is circular, i.e., \(S:=\{\bar{x}\,:\,|\bar{x}|\leq 1\}\).
-
The prestrain tensor \(B\) of Assumption (2.6) either vanishes or is equal to \(\frac{3\pi }{8}\operatorname{Id}\), and the local prestrain microstructure is captured by the 2-parameter family
$$\begin{aligned} Z_{\vartheta ,\alpha }:=\bigg\{ &(\bar{x},y)\in S\times Y\,:\,y\in [0, \vartheta ),\,\bar{x}=r \begin{pmatrix} \cos \varphi \\ \sin \varphi \end{pmatrix} \, \text{with $r\in [0,1]$},\\ &\varphi \in [\alpha -\frac{\pi }{2},\alpha +\frac{\pi }{2}) \bigg\} , \end{aligned}$$with angle \(\alpha \in [0,2\pi )\) and volume-fraction \(\vartheta \in [0,1]\), see Fig. 4 for illustration. More precisely, we assume that for a.e. \(x_{1}\in \omega \) we have \(\{B(x_{1},\cdot )\neq 0\}=Z_{\vartheta (x_{1}),\alpha (x_{1})}\) for suitable parameters \(\alpha (x_{1})\) and \(\vartheta (x_{1})\).
Fig. 4 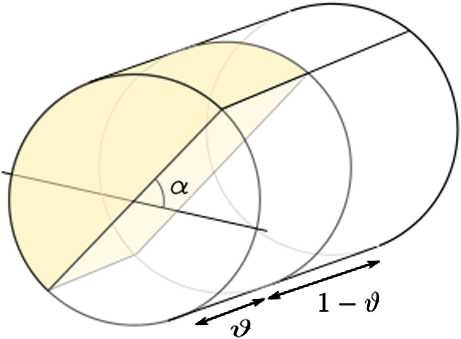
Schematic picture of the building blocks. The set \(Z_{\vartheta ,\alpha }\) is highlighted in yellow (Color figure online)
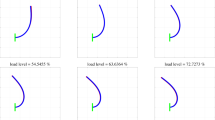
Fig. 5 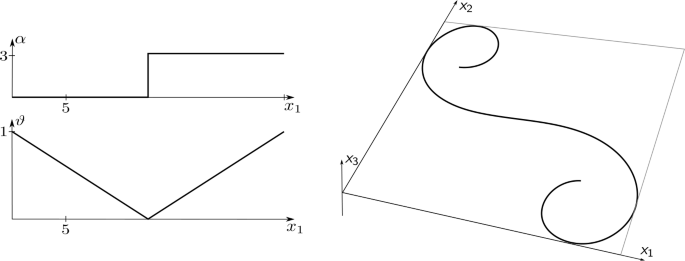
The figure shows the equilibrium shape of a rod made of a composite with a parametrized microstructure based on the building block \(Z_{\vartheta ,\alpha }\), see Fig. 4. The upper (resp. lower) diagram on the left-hand side shows the angle \(\alpha (x_{1})\) (resp. volume fraction \(\vartheta (x_{1})\)) as a function of the length variable \(x_{1}\). The diagram on the right-hand side shows the shape of a minimizing rod deformation \(u:[0,25]\to \mathbb{R}^{3}\) of the associated homogenized energy functional
Fig. 6 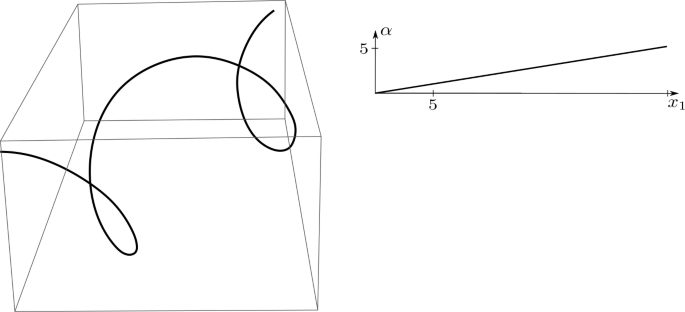
The figure shows the equilibrium shape of a rod made of a composite with a parametrized microstructure based on the building block \(Z_{\vartheta ,\alpha }\), see Fig. 4, with constant volume-fraction \(\vartheta =1\). The diagram above shows the angle \(\alpha (x_{1})\) as a function of the length variable \(x_{1}\). The diagram on the left shows the shape of a minimizing rod deformation \(u:[0,25]\to \mathbb{R}^{3}\) of the associated homogenized energy functional
-
The relative scaling parameter satisfies \(\gamma \in \{0,\infty \}\).



The upcoming result implies that any isometric curve \(u\in W^{2,2}(\omega ;\mathbb{R}^{3})\) with \(|u''|\leq 1\) can be recovered as a minimizer of a rod with a microstructured prestrain of the form
where \(\alpha :\omega \to [0,2\pi )\) and \(\vartheta :\omega \in [0,1]\) are suitable “designs”. Since any isometric \(u\in W^{2,2}(\omega ;\mathbb{R}^{3})\) is characterized (up to a rigid motion) by the first column of an associated \(K\in L^{2}(\omega ;\operatorname{Skew}(3))\), we only need to establish the following statement:
Lemma 4.2
To any \(K\in L^{2}(\omega ;\operatorname{Skew}(3))\)satisfying
we can find “designs” \(\alpha :\omega \to [0,2\pi )\)and \(\vartheta :\omega \in [0,1]\)such that the spontaneous curvature–torsion tensor \(K_{\mathrm{eff}}\)of Theorem 2.7associated with the prestrain tensor \(B\)defined in (39) satisfies
Proof
and thus
where \(K^{(2)}\) and \(K^{(3)}\) are defined in (25). The claim follows. □
5 Proofs
5.1 Main Result – Proof of Theorem 2.7
We first state a compactness and approximation result which is a simple consequence of [43, Proposition 3.2] and [43, Theorem 3.5].
Proposition 5.1
-
(a)
(Compactness and identification). Suppose that \((u^{h})\subset L^{2}(\Omega ;\mathbb{R}^{3})\)satisfies
$$ \limsup _{h\to 0}\frac{1}{h^{2}}\int _{\Omega }\operatorname{dist}^{2}( \nabla _{h} u^{h},\operatorname{SO}(3))\,dx< \infty . $$(41)Then there exist \((u,R,a)\in \mathcal{A}\), \(\chi \in L^{2}(\omega ;\boldsymbol{H}_{\mathrm{rel}}^{\gamma })\)and a subsequence (not relabeled) satisfying (10), (11), and
$$ {\boldsymbol{\mathrm{E}}}_{h}(u^{h}) \stackrel{2,\gamma }{\rightharpoonup } {\boldsymbol{\mathrm{E}}}(R^{t} \partial _{1}R,a)+\chi \qquad \textit{weakly two-scale in }L^{2}, $$(42)where \({\boldsymbol{\mathrm{E}}}_{h}\)and \({\boldsymbol{\mathrm{E}}}\)are defined in (8) and (14), respectively.
-
(b)
(Approximation). For all \((u,R,a)\in \mathcal{A}\)and \(\chi \in \boldsymbol{H}_{\mathrm{rel}}^{\gamma }\)there exists a sequence \((u^{h})\subset L^{2}(\Omega ;\mathbb{R}^{3})\)satisfying (10), (11), and
$$\begin{aligned} &{\boldsymbol{\mathrm{E}}}_{h}(u^{h})\stackrel{2,\gamma }{\to } { \boldsymbol{\mathrm{E}}}(R^{t}\partial _{1}R,a)+\chi \quad \textit{strongly two-scale in }L^{2}, \\ &\limsup _{h\to 0}\mathop{\operatorname{ess\,sup}}_{x\in \Omega } \sqrt{h}\left ( \frac{\operatorname{dist}(\nabla _{h} u^{h}(x),\operatorname{SO}(3))}{h}+| \operatorname{{\boldsymbol{\mathrm{E}}}}_{h}(u^{h})|\right )=0. \end{aligned}$$
Proof of Proposition 5.1
Step 1. Proof of (a).
By [43, Proposition 3.2] there exist \((u,R)\in \mathcal{A}\) and a subsequence (not relabeled) satisfying (10). Moreover, by [43, Theorem 3.5] there exists \(a\in L^{2}(\omega )\) and \(\chi \in \boldsymbol{H}_{\mathrm{rel}}^{\gamma }\) such that, up to extracting a further subsequence (not relabeled), we have
(By the argument in [43, Proof of Theorem 3.5 (a), Step 4] it a posteriori follows that the rotation field \(R\) in (10) and (43) are the same). Hence, it is left to show (11). By two-scale convergence, for every \(\eta \in L^{2}(\omega )\) we have
By (3) and the definition of \(\boldsymbol{H}_{\mathrm{rel}}^{\gamma }\), we have for almost every \(x_{1}\in \omega \),
Combining (44) and (45), we obtain (11).
Step 2. Proof of (b).
Let \((u,R,a)\in \mathcal{A}\) be given. By part (b) of [43, Theorem 3.5], we find \((u^{h})\subset L^{2}(\Omega ;\mathbb{R}^{3})\) satisfying (10) and (42). The same argument as in Step 1 yields that \((u^{h})\) also satisfies (11). □
We recall the following (lower semi-)continuity result with respect to two-scale convergence:
Lemma 5.2
([43], Lemma 4.8)
Fix \(\gamma \in [0,\infty ]\). Let \(Q_{\varepsilon }\)and \(Q\)be as in Assumption 2.3, and let \(\tilde{E}_{h}\)be a sequence in \(L^{2}(\Omega ;\mathbb{R}^{3\times 3})\).
-
(a)
If \(\tilde{E}_{h}\stackrel{2,\gamma }{\rightharpoonup } \tilde{E}\)weakly two-scale in \(L^{2}\), then
$$ \liminf _{h\to 0}\int _{\Omega }Q_{\varepsilon (h)}(x,\tilde{E}_{h}(x)) \,dx\geq \iint _{\Omega \times Y}Q(x,y,\tilde{E}(x,y))\,dy\,dx. $$ -
(b)
If \(\tilde{E}_{h}\stackrel{2,\gamma }{\to }\tilde{E}\)strongly two-scale in \(L^{2}\), then
$$ \lim _{h\to 0}\int _{\Omega }Q_{\varepsilon (h)}(x,\tilde{E}_{h}(x))\,dx= \iint _{\Omega \times Y}Q(x,y,\tilde{E}(x,y))\,dy\,dx. $$
Notice that in [43] the statement of Lemma 5.2 is proven, following arguments of [59], under the assumption that \(x_{1}\mapsto Q(x_{1},\bar{x},y)\) is continuous for almost every \((\bar{x},y)\in S\times \mathbb{R}\). Evidently, this extends to the piecewise continuous case considered here.
Now, we are in position to prove Theorem 2.7. We follow the argument in [43].
Proof of Theorem 2.7
Step 1. Compactness.
In view of Proposition 5.1 it suffices to show that for every sequence \((u^{h})\subset L^{2}(\Omega ;\mathbb{R}^{3})\)
By the triangle inequality,
Since \(\limsup _{h\to 0} h\|B^{h}\|_{L^{\infty }(\Omega )}=0\) (by assumption), there exists \(h_{0}>0\) such that \(h\|B^{h}\|_{L^{\infty }(\Omega )}<\frac{1}{2}\) for \(h\in (0,h_{0}]\). Hence, for \(h\in (0,h_{0}]\),
Now, (41) follows by non-degeneracy of \(W\), cf. (W2), and the equiboundedness of \(B^{h}\) in \(L^{2}(\Omega )\).
Step 2. Lower bound.
Let \((u^{h})\subset L^{2}(\Omega ;\mathbb{R}^{3})\) be such that (10) and (11) are valid for some \((u,R,a)\in \mathcal{A}\). Without loss of generality, we may assume that
By Proposition 5.1 (a), there exists \(\chi \in \boldsymbol{H}_{\mathrm{rel}}^{\gamma }\) such that (42) holds (up to possibly extracting a further subsequence). To shorten notation, we set
Substep 2.1. We claim that
The bound follows by a careful Taylor expansion. To that end, set
By construction there exists \(h_{0}>0\) such that for all \(h\in (0,h_{0}]\) we have \(\det (\nabla _{h} u(x))>\frac{1}{2}\) on \(\{{\mathbf{1}}^{h}=1\}\). Thus, by polar-factorization, for all \(h\in (0,h_{0}]\) and \(x\in \{{\mathbf{1}}^{h}=1\}\) there exists \(R^{h}(x)\in \operatorname{SO}(3)\) such that \(\nabla _{h} u(x)=R^{h}(x)(\operatorname{Id}+h \operatorname{E}^{h}(x))\). Thanks to the non-negativity of \(W_{\varepsilon (h)}\), frame-indifference (W1), the quadratic expansion (W4), and minimality at identity (W3), we get
where in the last line we used that \(h|{\mathbf{1}}^{h}(E^{h}+B^{h}+h E^{h} B^{h})|\leq 3\sqrt{h}\). Since \((E^{h})\) and \((B^{h})\) are bounded in \(L^{2}\) and since \(\limsup _{h\to 0}h\|B^{h}\|_{L^{\infty }(\Omega )}=0\) (by assumption), we get
From \(E^{h}\stackrel{2,\gamma }{\to }E\), \(B^{h}\stackrel{2,\gamma }{\to }B\) and \(\limsup _{h\to 0}h\|B^{h}\|_{L^{\infty }(\Omega )}=0\), and since \({\mathbf{1}}^{h}\to 1\) (boundedly in measure), we get
and thus (46) follows with help of Lemma 5.2.
Substep 2.2. Conclusion
Recall that \(P^{\gamma ,x_{1}}E(x_{1},\cdot )=0\) for a.e. \(x_{1}\in \omega \). Hence,
By Definition 2.11 we have \(P_{\mathrm{rel}}^{\gamma ,x_{1}}\operatorname{sym}B(x_{1},\cdot )=P_{ \mathrm{rel}}^{\gamma ,x_{1}}{\boldsymbol{\mathrm{E}}}(K_{\mathrm{eff}}(x_{1}),a_{ \mathrm{eff}}(x_{1}))\) for a.e. \(x_{1}\in \omega \), and thus with (46) we get
Step 3. Limsup inequality.
Let \((u,R,a)\in \mathcal{A}\) be given. For convenience set \(E:={\boldsymbol{\mathrm{E}}}(R^{t}\partial _{1}R,a)\). By Lemma 2.9, (21), and Definition 2.11 we have
In view of (19) we have \(I=P^{\gamma ,\bullet }+P^{\gamma ,\bullet }_{\mathrm{rel}}+(I-P^{\gamma , \bullet }_{\mathrm{rel}})(I-P^{\gamma ,\bullet })\), where \(I\) denotes the identity operator on \(L^{2}(\omega ;\boldsymbol{H})\). Since \(P^{\gamma ,\bullet }E=0\), we get the decomposition
Combined with (47) we arrive at
By construction we have \(\chi \in L^{2}(\omega ;\boldsymbol{H}^{\gamma }_{\mathrm{rel}})\), and thus by Proposition 5.1 there exists a sequence \(u^{h}\in H^{1}(\Omega ;\mathbb{R}^{3})\) satisfying (10), (11), and
(50) implies \(\det \nabla _{h} u^{h}>0\) for all \(h>0\) sufficiently small. Hence, combining the polar-factorization of \(\nabla _{h} u^{h}\), frame indifference of \(W_{\varepsilon (h)}\), and (W4), we get
Since \((E^{h})\) and \((B^{h})\) are uniformly bounded in \(L^{2}(\Omega )\), and \(\limsup _{h\to 0}h(\|B^{h}\|_{L^{\infty }(\Omega )}+\|E^{h}\|_{L^{\infty }(\Omega )})=0\) by (5) and (50), we obtain that \(q^{h}\to 0\) in \(L^{1}(\Omega )\). Moreover, (49), Assumption 2.6 and (5) imply
Hence, Lemma 5.2 and (48) yield
□
5.2 Homogenization Formulas via BVPs – Proofs of Lemma 2.10, Proposition 3.1 and Lemma 3.2
Proof of Lemma 2.10
Throughout the proof we denote by \(C\) a positive constant that can be chosen only depending on \(\alpha ,\beta ,\gamma \) and \(S\). By construction \({{\boldsymbol{\mathrm{E}}}}^{\gamma ,x_{1}}\) is linear and bounded. A standard argument from functional analysis implies that \({{\boldsymbol{\mathrm{E}}}}^{\gamma ,x_{1}}\) is an isomorphism, if \({{\boldsymbol{\mathrm{E}}}}^{\gamma ,x_{1}}\) is surjective and satisfies (22). Surjectivity follows from the fact that \(\boldsymbol{H}^{\gamma }=\text{range}({\boldsymbol{\mathrm{E}}}^{\gamma ,x_{1}}) \oplus \boldsymbol{H}^{\gamma }_{\mathrm{rel}}\), which implies that \((\boldsymbol{H}^{\gamma }_{\mathrm{rel}})^{\perp x_{1}}\subset \text{range}({{ \boldsymbol{\mathrm{E}}}}^{\gamma ,x_{1}})\) for every \(x_{1}\in \omega \). The upper bound in (22) is a consequence of (18). We prove the lower bound. Since \((\boldsymbol{H}^{\gamma }_{\mathrm{rel}})^{\perp x_{1}}\subset \boldsymbol{H}^{\gamma }\), for any \((K,a)\in \operatorname{Skew}(3)\times \mathbb{R}\) there exists \(\chi _{K,a}\in \boldsymbol{H}^{\gamma }_{\mathrm{rel}}\) such that \({{\boldsymbol{\mathrm{E}}}}^{\gamma ,x_{1}}(K,a)={{\boldsymbol{\mathrm{E}}}}(K,a)+ \chi _{K,a}\). By the properties of the orthogonal projection,
This variational problem has a unique solution, and the associated solution operator \(T:\operatorname{Skew}(3)\times \mathbb{R}\to \boldsymbol{H}^{\gamma }_{ \mathrm{rel}}\), \(T(K,a):=\chi _{K,a}\) is linear and bounded. By the lower bound in (18), we thus obtain
where \(\|\cdot \|\) and \(\big (\cdot ,\cdot \big )\) denote the standard norm and scalar product in \(\boldsymbol{H}\) (that is \((F,G):=\sum _{ij}\iint _{S\times Y}F_{ij}G_{ij}\)). It is easy to see that \(E(0,a)\) is \((\cdot ,\cdot )\)-orthogonal to \(E(K,0)\) and \(\boldsymbol{H}^{\gamma }_{\mathrm{rel}}\). Thus,
Moreover, by the short argument in [43, Step 3, Proof of Proposition 2.13], we have
This completes the argument for the lower bound in (18). □
Proof of Proposition 3.1
Step 1. Argument for (c).
The definition of \(P^{\gamma ,x_{1}}_{\mathrm{rel}}\) and (26) yield for \(i=1,\ldots ,4\) the identity
Hence, by (21)
which proves the claim.
Step 2. Argument for (a).
The symmetry of \(\mathbb{M}\) is obvious (see (27)). Since \(Q(x_{1},\bar{x},y,\cdot )\in \mathcal{Q}(\alpha ,\beta )\) for almost every \((\bar{x},y)\in S\times \mathbb{R}\) (see Assumption 2.3), the identities (21) and (28) yield
for every \((K,a)\in \operatorname{Skew}(3)\times \mathbb{R}\). Hence, (22) implies that \(\mathbb{M}\) is positive definite.
Step 3. Argument for (b).
By the definition of \(\mathbb{M}\) it suffices to show that the map \(x_{1}\mapsto \chi ^{(i)}(x_{1})\in L^{2}(S\times Y)\) is piecewise continuous. For every \(x_{1},x_{1}'\in \omega \) and \(i=1,\dots ,4\), we have
Hence, the piecewise continuity of \(\mathbb{L}(x_{1},\cdot )\in L^{\infty }(S\times \mathbb{R})\) yields the piecewise continuity of \(x_{1}\mapsto \chi ^{(i)}(x_{1})\in L^{2}(S\times Y)\).
Step 4. Argument for (d).
Let \(k:\omega \to \mathbb{R}^{4}\) be defined via the identity (29). For every \(j\in \{1,\dots ,4\}\) and almost every \(x_{1}\in \omega \), we have
which proves the claim. □
Proof of Lemma 3.2
Step 1. The case \(\gamma \in (0,\infty )\). It is easy to see that the map
defines a linear and bounded surjection. Thanks to Korn’s inequality in form of [43, Proposition 6.12], \(\iota ^{\gamma }\) is also injective, and thus an isomorphism. Thus, \(\phi _{E}:=({\iota ^{\gamma }})^{-1}\chi _{E}\) is characterized by the equation
By the definition of \((\cdot ,\cdot )_{x_{1}}\), and thanks to the fact that \(\langle \mathbb{L} F,G\rangle =\langle \mathbb{L} \operatorname{sym}F, \operatorname{sym}G\rangle \), the above equation can be written in the form
Step 2. The case \(\gamma =0\). Similarly to the previous step, we only need to show that \(\iota ^{0}\) is an isomorphism. By construction \(\iota ^{0}\) is linear, bounded and by the following observation surjective:
We argue that the kernel of \(\iota ^{0}\), denoted by \(\text{kern}(\iota ^{0})\), is trivial. By orthogonality we have
where \(\Psi _{\tau }=(\Psi \cdot K^{(4)}) K^{(4)}\), and \(\Psi _{\kappa }:=\Psi -\Psi _{\tau }\). Hence, (thanks to Poincare’s inequality)
Let \(\bar{\phi }_{i}\) denote the components of \(\bar{\phi }\). By orthogonality, we have
Thus, \(\bar{\phi }_{2}=\bar{\phi }_{3}=0\). To see that \(\Psi _{\tau }\) and \(\bar{\phi }_{1}\) vanish as well, note that \(\|\iota ^{0}(\Psi _{\tau },0,\bar{\phi }_{1}e_{1})\|^{2}=0\) is equivalent to
Since \(K^{(4)}{\bar{\boldsymbol{x}}}(\bar{x})\) is not a gradient in \(\bar{x}\), we deduce that \(\phi _{1}=0\) and \(\tau (y)=0\), i.e., \(\Psi _{\tau }=0\).
Step 3. The case \(\gamma =\infty \). As in the previous step, it suffices to argue that the kernel of \(\iota ^{\infty }\) is trivial. By orthogonality,
and thus \(\iota ^{\infty }(\hat{\phi },\bar{\phi })=0\) implies (thanks to Poincaré’s inequality) \(\hat{\phi }=0\) and \(\bar{\phi }=0\). □
5.3 Isotropic Case – Proof of Lemma 4.1
Proof of Lemma 4.1
We only need to prove (34a)–(34c) (which will done in Step 1 and Step 2 below). The remaining claims then follow from the observation that \({{\boldsymbol{\mathrm{E}}}}(K^{(j)},0)+\chi ^{(j)}\), \(j=1,2,3\) and \({{\boldsymbol{\mathrm{E}}}}(0,1)+\chi ^{(4)}\) given by (34a)–(34c) are mutually orthogonal with respect to the inner product \((\cdot ,\cdot )_{x_{1}}\). The latter implies that \(\mathbb{M}(x_{1})\) is diagonal and thus a straightforward calculation yields the precise formulas for the entries of \(\mathbb{M}\), \(b\) and \(k\). For the argument of (34a)–(34c) we first note that \(\chi ^{(i)}\) defined by the variational problem (26) can be equivalently characterized as the minimizer of an associated quadratic–convex energy functional. We exploit this fact in the proof below.
Step 1. The case \(\gamma =0\).
-
Argument for (34a). In view of Lemma 3.2, we have \(\chi ^{(1)}=\iota ^{0}(\Psi ,\hat{\phi },\bar{\phi })\), where \((\Psi ,\hat{\phi },\bar{\phi })\) is a minimizer of the functional \({\mathbf{X^{0}}}\ni (\Psi ,\hat{\phi },\bar{\phi })\mapsto \int _{S\times Y}Q(y,e_{1} \otimes e_{1}+\iota ^{0}(\Psi ,\hat{\phi },\bar{\phi }))\). Set
$$ \partial _{y}\Psi =\kappa _{2} K^{(2)}+\kappa _{3} K^{(3)}+\tau K^{(4)}, \qquad \bar{\phi }=(\bar{\phi }_{1},\bar{\bar{\phi }}),\qquad \bar{\bar{\phi }}=(\bar{\phi }_{2},\bar{\phi }_{3}), $$where \(K^{(i)}\), \(i=1,2,3\) is the basis of \(\operatorname{Skew}(3)\) given in (25). Note that
where \(\kappa =(\kappa _{2},\kappa _{3})\). By appealing to the specific structure of \(Q\) we directly see that the minimizer satisfies \(\tau =\bar{\phi }_{1}=0\), and that the remaining degrees of freedom \(\kappa \), \(\hat{\phi }_{1}\), and \(\bar{\bar{\phi }}:=(\bar{\phi }_{2},\bar{\phi }_{3})\) minimize the expression
$$\begin{aligned} \iint _{S\times Y} 2\mu \big(1+\partial _{y}\hat{\phi }_{1}-\kappa \cdot \bar{x}\big)^{2}+2\mu |\operatorname{sym}\bar{\nabla }\bar{\bar{\phi }}|^{2}+\lambda (1+\partial _{y}\hat{\phi }_{1}-\kappa \cdot \bar{x}+\bar{\nabla }\cdot \bar{\bar{\phi }})^{2}. \end{aligned}$$The Euler-Lagrange equation reads
$$\begin{aligned} 0 =&\iint _{S\times Y} 2\mu \big(1+\partial _{y}\hat{\phi }_{1}-\kappa \cdot \bar{x}\big)\big(\partial _{y}\delta \hat{\phi }-\delta k\cdot \bar{x}\big)+2\mu \operatorname{sym}\bar{\nabla }\bar{\bar{\phi }}\cdot \bar{\nabla }\delta \bar{\bar{\phi }} \\ &\qquad +\lambda \big(1+\partial _{y}\hat{\phi }_{1}-\kappa \cdot \bar{x}+\bar{\nabla }\cdot \bar{\bar{\phi }}\big)\big(\partial _{y}\delta \hat{\phi }-\delta \kappa \cdot \bar{x}+\bar{\nabla }\cdot \delta \bar{\bar{\phi }}\big) \end{aligned}$$for all \(\delta \hat{\phi }\in H^{1}(\mathcal{Y})\), \(\delta \kappa =(\delta \kappa _{2},\delta \kappa _{3})\in L^{2}( \mathcal{Y};\mathbb{R}^{2})\) and \(\delta \bar{\bar{\phi }}\in L^{2}(S;H^{1}(\mathcal{Y};\mathbb{R}^{2}))\). With the Ansatz \(\kappa =0\), \(\bar{\bar{\phi }}=\rho \bar{x}\) with \(\rho \in L^{2}(\mathcal{Y})\), we have \(\bar{\nabla }\cdot \bar{\bar{\phi }}=2\rho \) and \(\operatorname{sym}\bar{\nabla }\bar{\bar{\phi }}=\rho \operatorname{Id}\), and the above turns into
$$\begin{aligned} 0 =&\iint _{S\times Y} \big((2\mu +\lambda )(1+\partial _{y}\hat{\phi }_{1})+2 \lambda \rho \big)\partial _{y}\delta \hat{\phi }+\big(2\rho (\lambda + \mu )+\lambda (1+\partial _{y}\hat{\phi })\big)\bar{\nabla }\cdot \delta \bar{\bar{\phi }}, \end{aligned}$$where we used that \(\delta \kappa \cdot \bar{x}\) is orthogonal to \(L^{2}(\mathcal{Y})\). From the variation in \(\delta \bar{\bar{\phi }}\), we get \(\rho =-\nu (1+\partial _{y}\hat{\phi })\), which we plug into the Euler-Lagrange equation:
$$\begin{aligned} 0 =&\int _{Y} \big((2\mu +\lambda )(1+\partial _{y}\hat{\phi }_{1})- \frac{\lambda ^{2}}{(\lambda +\mu )}(1+\partial _{y}\hat{\phi }_{1}) \big)\partial _{y}\delta \hat{\phi }=\int _{Y} \beta (1+\partial _{y} \hat{\phi })\partial _{y}\delta \hat{\phi }. \end{aligned}$$Thus, \((1+\partial _{y}\hat{\phi })=\frac{\beta _{\hom }}{\beta }\), and the claim follows.
-
Argument for (34b). We only consider \(i=2\), the case \(i=3\) follows in the same way. As above, we have \(\chi ^{(2)}=\iota ^{0}(\Psi ,\hat{\phi },\bar{\phi })\), where \((\Psi ,\hat{\phi },\bar{\phi })\) is a minimizer of the functional \({\mathbf{X^{0}}}\ni (\Psi ,\hat{\phi },\bar{\phi })\mapsto \int _{S\times Y}Q(y, -x_{2} e_{1}\otimes e_{1}+\iota ^{0}(\Psi ,\hat{\phi },\bar{\phi }))\). Analogous considerations as in the argument for (34a) yield \(\tau =\bar{\phi }_{1}=0\), and that the remaining degrees of freedom \(\kappa \), \(\hat{\phi }_{1}\), and \(\bar{\bar{\phi }}:=(\bar{\phi }_{2},\bar{\phi }_{3})\) minimize the expression
$$\begin{aligned} \iint _{S\times Y} 2\mu \big(\partial _{y}\hat{\phi }_{1}-x_{2}-\kappa \cdot \bar{x}\big)^{2}+2\mu |\operatorname{sym}\bar{\nabla }\bar{\bar{\phi }}|^{2}+\lambda (\partial _{y}\hat{\phi }_{1}-x_{2}- \kappa \cdot \bar{x}+\bar{\nabla }\cdot \bar{\bar{\phi }})^{2}. \end{aligned}$$The Euler-Lagrange equation reads
$$\begin{aligned} 0 =&\iint _{S\times Y} 2\mu \big(\partial _{y}\hat{\phi }_{1}-x_{2}- \kappa \cdot \bar{x}\big)\big(\partial _{1}\delta \hat{\phi }-\delta k \cdot \bar{x}\big)+2\mu \operatorname{sym}\bar{\nabla }\bar{\bar{\phi }} \cdot \bar{\nabla }\delta \bar{\bar{\phi }} \\ &\qquad +\lambda \big(\partial _{y}\hat{\phi }_{1}-x_{2}-\kappa \cdot \bar{x}+\bar{\nabla }\cdot \bar{\bar{\phi }}\big)\big(\partial _{y}\delta \hat{\phi }_{1}-\delta \kappa \cdot \bar{x}+\bar{\nabla }\cdot \delta \bar{\bar{\phi }}\big) \end{aligned}$$for all \(\delta \hat{\phi }\in H^{1}(\mathcal{Y})\), \(\delta \kappa =(\delta \kappa _{2},\delta \kappa _{3})\in L^{2}( \mathcal{Y};\mathbb{R}^{2})\) and \(\delta \bar{\bar{\phi }}\in L^{2}(S;H^{1}(\mathcal{Y};\mathbb{R}^{2}))\). With the Ansatz \(\hat{\phi }_{1}=0\), \(\kappa _{3}=0\), \(\bar{\bar{\phi }}=\rho \left (\tfrac{1}{2}(x_{2}^{2}-x_{3}^{2})e_{2}+x_{2}x_{3} e_{3}\right )\) with \(\rho \in L^{2}(\mathcal{Y})\), we have \(\bar{\nabla }\cdot \bar{\bar{\phi }}=2\rho x_{2}\) and \(\operatorname{sym}\bar{\nabla }\bar{\bar{\phi }}=\rho x_{2} \operatorname{Id}\) and the above turns into
$$\begin{aligned} 0 =&\iint _{S\times Y} x_{2}\big((2\mu +\lambda )(1+\kappa _{2})-2 \lambda \rho \big)\delta \kappa \cdot \bar{x} +x_{2}\big(2\rho ( \lambda +\mu )-\lambda (1+\kappa _{2})\big)\bar{\nabla }\cdot \delta \bar{\bar{\phi }}, \end{aligned}$$where we used that \(x_{2}\) is orthogonal to \(L^{2}(\mathcal{Y})\). Similar as in the argument for (34a), we get \(\rho =\nu (1+\kappa _{2})\) and \((1+\kappa _{2})=\frac{\beta _{\hom }}{\beta }\) and thus the claim follows.
-
Argument for (34c). We have \(\chi ^{(4)}=\iota ^{0}(\Psi ,\hat{\phi },\bar{\phi })\), where \((\Psi ,\hat{\phi },\bar{\phi })\) is a minimizer of the functional \({\mathbf{X^{0}}}\ni (\Psi ,\hat{\phi },\bar{\phi })\mapsto \int _{S\times Y}Q(y,K^{(4)}{ \bar{\boldsymbol{x}}}+ \iota ^{0}(\Psi ,\hat{\phi },\bar{\phi }))\). Note that
It is easy to see that the minimizer satisfies \(\kappa =\hat{\phi }=0\) and \(\bar{\bar{\phi }}=0\), and that the remaining degrees of freedom \(\tau \) and \(\bar{\phi }\) minimize the expression
$$\begin{aligned} \iint _{S\times Y} \mu \big((\partial _{2} \bar{\phi }- (\tau +1) x_{3})^{2}+( \partial _{3} \bar{\phi }+ (\tau +1) x_{2})^{2}\big). \end{aligned}$$It is straightforward to see that the minimizing pair \(\tau \) and \(\bar{\phi }\) are uniquely determined by \(1+\tau = \frac{\langle \mu \rangle _{\operatorname{hom}}}{\mu }\) and \(\bar{\phi }= (1+\tau ) \bar{\phi }_{S}\) which proves the claim.
Step 2. The case \(\gamma =\infty \).
-
Argument for (34a). As in Step 1, we have \(\chi ^{(1)}=\iota ^{\infty }(\hat{\phi },\bar{\phi })\), where \((\hat{\phi },\bar{\phi })\) is a minimizer of the functional \({\mathbf{X^{\infty }}}\ni (\hat{\phi },\bar{\phi })\mapsto \int _{S\times Y}Q(y,e_{1} \otimes e_{1}+\iota ^{\infty }(\hat{\phi },\bar{\phi }))\). By appealing to the specific structure of \(Q\) we directly see that the minimizer satisfies \(\hat{\phi }_{2}=\hat{\phi }_{3}=\bar{\phi }_{1}=0\), and that the remaining degrees of freedom \(\hat{\phi }_{1}\), and \(\bar{\bar{\phi }}:=(\bar{\phi }_{2},\bar{\phi }_{3})\) minimize the expression
$$\begin{aligned} \iint _{S\times Y} 2\mu \big(1+\partial _{y}\hat{\phi }_{1}\big)^{2}+2 \mu |\operatorname{sym}\bar{\nabla }\bar{\bar{\phi }}|^{2}+\lambda (1+ \partial _{y}\hat{\phi }_{1}+\bar{\nabla }\cdot \bar{\bar{\phi }})^{2}. \end{aligned}$$The Euler-Lagrange equation reads
$$ 0=\iint _{S\times Y} 2\mu \big(1+\partial _{y}\hat{\phi }_{1}\big) \partial _{y}\delta \hat{\phi }+2\mu \operatorname{sym}\bar{\nabla }\bar{\bar{\phi }}\cdot \bar{\nabla }\delta \bar{\bar{\phi }}+\lambda \big(1+ \partial _{y}\hat{\phi }_{1}+\bar{\nabla }\cdot \bar{\bar{\phi }}\big)\big( \partial _{y}\delta \hat{\phi }_{1}+\bar{\nabla }\cdot \delta \bar{\bar{\phi }}\big) $$for all \(\delta \hat{\phi }\in L^{2}(S;H_{1}(\mathcal{Y}))\) and \(\delta \bar{\bar{\phi }}\in H^{1}(S;\mathbb{R}^{2})\). The Ansatz \(\bar{\bar{\phi }}=\rho \bar{x}\), \(\rho \in \mathbb{R}\) yields
$$\begin{aligned} 0 =&\iint _{S\times Y} \big((2\mu +\lambda )(1+\partial _{y}\hat{\phi }_{1})+2 \lambda \rho \big)\partial _{y}\delta \hat{\phi }+\big(2\rho (\lambda + \mu )+\lambda (1+\partial _{y}\hat{\phi })\big)\bar{\nabla }\cdot \delta \bar{\bar{\phi }}. \end{aligned}$$From the variation in \(\delta \hat{\phi }\), we obtain \(1+\partial _{y}\hat{\phi }_{1} = \frac{\langle M\rangle _{\operatorname{hom}}}{M}+2\rho ( \frac{\langle M\rangle _{\operatorname{hom}}}{M}\langle \frac{\lambda }{M}\rangle -\frac{\lambda }{M})\) (recall \(M:=2\mu +\lambda \)) and the variation in \(\delta \bar{\bar{\phi }}\) yields
$$ 0=2\rho \left (\langle \mu +\lambda \rangle + \langle M\rangle _{ \operatorname{hom}}\langle \frac{\lambda }{M}\rangle - \langle \frac{\lambda ^{2}}{M} \rangle \right ) +\langle M\rangle _{ \operatorname{hom}}\langle \frac{\lambda }{M}\rangle \quad \Rightarrow \rho =-\nu _{\infty }$$and thus the claim follows.
-
Arguments for (34b). As is Step 1, we only consider the case \(i=2\). We have \(\chi ^{(2)}=\iota ^{\infty }(\hat{\phi },\bar{\phi })\), where \((\hat{\phi },\bar{\phi })\in X^{\infty }\) is such that \(\hat{\phi }_{2}=\hat{\phi }_{3}=\bar{\phi }_{1}=0\) and the remaining degrees of freedom \(\hat{\phi }_{1}\) and \(\bar{\bar{\phi }}:=(\bar{\phi }_{2},\bar{\phi }_{3})\) minimize the expression
$$\begin{aligned} \iint _{S\times Y} 2\mu \big(\partial _{y}\hat{\phi }_{1}-x_{2}\big)^{2}+2 \mu |\operatorname{sym}\bar{\nabla }\bar{\bar{\phi }}|^{2}+\lambda ( \partial _{y}\hat{\phi }_{1}-x_{2}+\bar{\nabla }\cdot \bar{\bar{\phi }})^{2}. \end{aligned}$$The Euler-Lagrange equation reads
$$ 0=\iint _{S\times Y} 2\mu \big(\partial _{y}\hat{\phi }_{1}-x_{2}\big) \partial _{y}\delta \hat{\phi }+2\mu \operatorname{sym}\bar{\nabla }\bar{\bar{\phi }}\cdot \bar{\nabla }\delta \bar{\bar{\phi }}+\lambda \big( \partial _{y}\hat{\phi }_{1}-x_{2}+\bar{\nabla }\cdot \bar{\bar{\phi }} \big)\big(\partial _{y}\delta \hat{\phi }+\bar{\nabla }\cdot \delta \bar{\bar{\phi }}\big) $$for all \(\delta \hat{\phi }\in L^{2}(S;H_{1}(\mathcal{Y}))\) and \(\delta \bar{\bar{\phi }}\in H^{1}(S;\mathbb{R}^{2})\). We make the Ansatz \(\hat{\phi }_{1}(\bar{x},y) = -x_{2} \hat{\varphi }(y)\) with \(\hat{\varphi }\in H^{1}(\mathcal{Y})\) and \(\bar{\bar{\phi }}=\rho \left (\tfrac{1}{2}(x_{2}^{2}-x_{3}^{2})e_{2}+x_{2}x_{3} e_{3}\right ) \) with \(\rho \in \mathbb{R}\). Then, \(\bar{\nabla }\cdot \bar{\bar{\phi }}=2\rho x_{2}\), \(\operatorname{sym}\bar{\nabla }\bar{\bar{\phi }}=\rho x_{2} \operatorname{Id}\) and the above expression turns into
$$\begin{aligned} 0 =&\iint _{S\times Y} x_{2}\big((2\mu +\lambda )(\partial _{y} \hat{\varphi }+1)-2\lambda \rho \big)\partial _{y} \delta \hat{\phi }+ x_{2} \big(2\rho (\lambda +\mu )-\lambda (\partial _{y} \hat{\varphi }+1) \big)\bar{\nabla }\cdot \delta \bar{\bar{\phi }}. \end{aligned}$$From the variation in \(\delta \hat{\phi }\), we obtain \(1+\partial _{y}\hat{\varphi }_{1} = \frac{\langle M\rangle _{\operatorname{hom}}}{M}-2\rho ( \frac{\langle M\rangle _{\operatorname{hom}}}{M}\langle \frac{\lambda }{M}\rangle -\frac{\lambda }{M})\) and the variation in \(\delta \bar{\phi }\) yields \(\rho =\nu _{\infty }\). Hence, the claim follows.
-
Argument for (34c). We have \(\chi ^{(4)}=\iota ^{\infty }(\hat{\phi },\bar{\phi })\), where \((\Psi ,\hat{\phi },\bar{\phi })\) is a minimizer of the functional \({\mathbf{X^{0}}}\ni (\Psi ,\hat{\phi },\bar{\phi })\mapsto \int _{S\times Y}Q(y,K^{(4)}{ \bar{\boldsymbol{x}}}+ \iota ^{\infty }(\hat{\phi },\bar{\phi }))\). Analogous to the case \(\gamma =0\), we obtain that \(\hat{\phi }_{1}=0\) and \(\bar{\bar{\phi }}=0\), and that the remaining degrees of freedom \(\hat{\phi }_{2}\), \(\hat{\phi }_{3}\) and \(\bar{\phi }\) minimize the expression
$$\begin{aligned} \iint _{S\times Y} \mu \big((\partial _{2} \bar{\phi }+\partial _{y} \hat{\phi }_{1}- x_{3})^{2}+(\partial _{3} \bar{\phi }+ \partial \hat{\phi }_{1} +x_{2})^{2}\big). \end{aligned}$$Appealing to the corresponding Euler-Lagrange equation, we see that the minimizer is given by \(\bar{\phi }=\bar{\phi }_{S}\), \(\hat{\phi }_{2}=\hat{\varphi }(\partial _{2} \bar{\phi }-x_{3})\), \(\hat{\phi }_{2}=\hat{\varphi }(\partial _{2} \bar{\phi }-x_{3})\) where \(\hat{\varphi }\in H^{1}(\mathcal{Y})\) is uniquely characterized by and \(1+\partial _{y} \hat{\varphi }= \frac{\langle \mu \rangle _{\operatorname{hom}}}{\mu }\). From this, the claim follows.
□
References
Agostiniani, V., DeSimone, A.: Rigorous derivation of active plate models for thin sheets of nematic elastomers. Math. Mech. Solids (2017). https://doi.org/10.1177/1081286517699991
Agostiniani, V., DeSimone, A., Koumatos, K.: Shape programming for narrow ribbons of nematic elastomers. J. Elast. 127(1), 1–24 (2017)
Allaire, G.: Homogenization and two-scale convergence. SIAM J. Math. Anal. 23(6), 1482–1518 (1992)
Antman, S.S.: Ordinary differential equations of non-linear elasticity. I. Foundations of the theories of non-linearly elastic rods and shells. Arch. Ration. Mech. Anal. 61(4), 307–351 (1976)
Audoly, B., Pomeau, Y.: Elasticity and Geometry. Oxford University Press, Oxford (2010)
Ben Amar, M., Goriely, A.: Growth and instability in elastic tissues. J. Mech. Phys. Solids 53(10), 2284–2319 (2005)
Bartels, S.: Finite element simulation of nonlinear bending models for thin elastic rods and plates. In: Handbook of Numerical Analysis, vol. 21, pp. 221–273 (2020)
Bhattacharya, K., Lewicka, M., Schäffner, M.: Plates with incompatible prestrain. Arch. Ration. Mech. Anal. 221, 143–181 (2016)
Ciarlet, P.G.: Mathematical Elasticity: Volume II: Theory of Plates, vol. 27. Elsevier, Amsterdam (1997)
Ciarlet, P.G., Gratie, L., Mardare, C.: Intrinsic methods in elasticity: a mathematical survey. Discrete Contin. Dyn. Syst. 23, 136–164 (2009)
Cicalese, M., Ruf, M., Solombrino, F.: On global and local minimizers of prestrained thin elastic rods. Calc. Var. Partial Differ. Equ. 56, 115 (2017)
Dal Maso, G., Negri, M., Percivale, D.: Linearized elasticity as \(\Gamma \)-limit of finite elasticity. Set-Valued Anal. 10(2–3), 165–183 (2002)
Dervaux, J., Ben Amar, M.: Morphogenesis of growing soft tissues. Phys. Rev. Lett. 101(6), 068101 (2008)
Efrati, E., Sharon, E., Kupferman, R.: Elastic theory of unconstrained non-Euclidean plates. J. Mech. Phys. Solids 57(4), 762–775 (2009)
Freddi, L., Hornung, P., Mora, M.G., Paroni, R.: A corrected Sadowsky functional for inextensible elastic ribbons. J. Elast. 123, 125–136 (2016)
Freddi, L., Hornung, P., Mora, M.G., Paroni, R.: A variational model for anisotropic and naturally twisted ribbons. SIAM J. Math. Anal. 48, 3883–3906 (2016)
Friesecke, G., James, R.D., Müller, S.: A theorem on geometric rigidity and the derivation of nonlinear plate theory from three-dimensional elasticity. Commun. Pure Appl. Math. 55, 1461–1506 (2002)
Galante, S., Lucantonio, A., Nardinocchi, P.: The multiplicative decomposition of the deformation gradient in the multiphysics modeling of ionic polymers. Int. J. Non-Linear Mech. 51, 112–120 (2013)
Gloria, A., Neukamm, S.: Commutability of homogenization and linearization at the identity in finite elasticity and applications. Ann. Inst. Henri Poincaré, Anal. Non Linéaire 28, 941–964 (2011)
Goriely, A., Moulton, D.E., Vandiver, R.: Elastic cavitation, tube hollowing, and differential growth in plants and biological tissues. Europhys. Lett. 91(1), 18001 (2010)
Hornung, P., Neukamm, S., Velčić, I.: Derivation of a homogenized nonlinear plate theory from 3d elasticity. Calc. Var. Partial Differ. Equ. 51(3–4), 677–699 (2014)
Hornung, P., Velčić, I.: Derivation of a homogenized von-Kármán shell theory from 3D elasticity. Ann. Inst. Henri Poincaré, Anal. Non Linéaire 32(5), 1039–1070 (2015)
Hornung, P., Velčić, I.: Regularity of intrinsically convex \(W^{2,2}\) surfaces and a derivation of a homogenized bending theory of convex shells. J. Math. Pures Appl. (9) 115, 1–23 (2018)
Ionov, L.: Biomimetic hydrogel-based actuating systems. Adv. Funct. Mater. 23(36), 4555–4570 (2013)
Eckart, C.: The thermodynamics of irreversible processes. III. Relativistic theory of the simple fluid. Phys. Rev. 58(10), 919 (1940)
Klein, Y., Efrati, E., Sharon, E.: Shaping of elastic sheets by prescription of non-Euclidean metrics. Science 315(5815), 1116–1120 (2007)
Kohn, R.V., O’Brien, E.: On the bending and twisting of rods with misfit. J. Elast. 130(1), 115–143 (2018)
Kröner, E.: Allgemeine kontinuumstheorie der versetzungen und eigenspannungen. Arch. Ration. Mech. Anal. 4(1), 273 (1959)
Kupferman, R., Solomon, J.P.: A Riemannian approach to reduced plate, shell, and rod theories. J. Funct. Anal. 266(5), 2989–3039 (2014)
Lee, E.: Elastic-plastic deformation at finite strains. J. Appl. Mech. 36, 1–6 (1969)
Lewicka, M.: Quantitative immersability of Riemann metrics and the infinite hierarchy of prestrained shell models. Arch. Ration. Mech. Anal. 236, 1677–1707 (2020)
Lewicka, M., Lučić, D.: Dimension reduction for thin films with transversally varying prestrain: oscillatory and nonoscillatory cases. Commun. Pure Appl. Math. (2020). https://doi.org/10.1002/cpa.21871
Lewicka, M., Mahadevan, L., Pakzad, M.R.: The Föppl-von Kármán equations for plates with incompatible strains. Proc. R. Soc., Math. Phys. Eng. Sci. 467(2126), 402–426 (2010)
Lewicka, M., Mahadevan, L., Pakzad, M.R.: The Monge-Ampére constraint: matching of isometries, density and regularity, and elastic theories of shallow shells. Ann. Inst. Henri Poincaré, Anal. Non Linéaire 34, 45–67 (2017)
Lewicka, M., Pakzad, M.R.: Scaling laws for non-Euclidean plates and the \(W^{2,2}\) isometric immersions of Riemannian metrics. ESAIM Control Optim. Calc. Var. 17, 1158–1173 (2011)
Lewicka, M., Raoult, A., Ricciotti, D.: Plates with incompatible prestrain of higher order. Ann. Inst. Henri Poincaré, Anal. Non Linéaire 34, 1883–1912 (2017)
Maor, C., Shachar, A.: On the role of curvature in the elastic energy of non-Euclidean thin bodies. J. Elast. 134, 149–173 (2019)
Marohnić, M., Velčić, I.: Non-periodic homogenization of bending-torsion theory for inextensible rods from 3D elasticity. Ann. Mat. Pura Appl. 195, 1055–1079 (2016)
Mielke, A.: Saint-Venant’s problem and semi-inverse solutions in nonlinear elasticity. Arch. Ration. Mech. Anal. 102(3), 205–229 (1988)
Mora, M.G., Müller, S.: Derivation of the nonlinear bending-torsion theory for inextensible rods by \(\Gamma \)-convergence. Calc. Var. Partial Differ. Equ. 18, 287–305 (2003)
Müller, S., Neukamm, S.: On the commutability of homogenization and linearization in finite elasticity. Arch. Ration. Mech. Anal. 201, 465–500 (2011)
Neukamm, S.: Homogenization, linearization and dimension reduction in elasticity with variational methods. Diss. Technische Universität München (2010)
Neukamm, S.: Rigorous derivation of a homogenized bending-torsion theory for inextensible rods from three-dimensional elasticity. Arch. Ration. Mech. Anal. 206, 645–706 (2012)
Neukamm, S., Olbermann, H.: Homogenization of the nonlinear bending theory for plates. Calc. Var. Partial Differ. Equ. 53(3–4), 719–753 (2015)
Neukamm, S., Velčić, I.: Derivation of a homogenized von Kármán plate theory from 3D elasticity. Math. Models Methods Appl. Sci. 23(14), 2701–2748 (2013)
Nguetseng, G.: A general convergence result for a functional related to the theory of homogenization. SIAM J. Math. Anal. 20, 608–623 (1989)
Paroni, R., Tomassetti, G.: A variational justification of linear elasticity with residual stress. J. Elast. 97, 189–206 (2009)
Plucinsky, P., Lemm, M., Bhattacharya, K.: Actuation of thin nematic elastomer sheets with controlled heterogeneity. Arch. Ration. Mech. Anal. 227, 149–214 (2018)
Rodriguez, E.K., Hoger, A., McCulloch, A.: Stress-dependent finite growth in soft elastic tissues. J. Biomech. 27(4), 455–467 (1994)
Scardia, L.: The nonlinear bending-torsion theory for curved rods as Gamma-limit of three-dimensional elasticity. Asymptot. Anal. 47(3,4), 317–343 (2006)
Schmidt, B.: Plate theory for stressed heterogeneous multilayers of finite bending energy. J. Math. Pures Appl. 88, 107–122 (2007)
Schmidt, B.: Minimal energy configurations of strained multi-layers. Calc. Var. Partial Differ. Equ. 30(4), 477–497 (2007)
Shtukenberg, A.G., et al.: Growth actuated bending and twisting of single crystals. Angew. Chem., Int. Ed. Engl. 53(3), 672–699 (2014)
Stojanovic, R., Djuric, S., Vujoševic, L.: On finite thermal deformations. Arch. Mech. Stosow. 16, 103–108 (1964)
Vandiver, R., Goriely, A.: Tissue tension and axial growth of cylindrical structures in plants and elastic tissues. Europhys. Lett. 84(5), 58004 (2008)
van Manen, T., Janbaz, S., Zadpoor, A.A.: Programming the shape-shifting of flat soft matter. Mater. Today 21(2), 144–163 (2018)
Velčić, I.: Periodically wrinkled plate model of the Föppl-von Kármán type. Ann. Sc. Norm. Super. Pisa, Cl. Sci. (5) 12, 275–307 (2013)
Velčić, I.: On the derivation of homogenized bending plate model. Calc. Var. Partial Differ. Equ. 53(3-4), 561–586 (2015)
Visintin, A.: Two-scale convergence of some integral functionals. Calc. Var. Partial Differ. Equ. 29, 239–265 (2007)
Vujosevic, L., Lubarda, V.A.: Finite-strain thermoelasticity based on multiplicative decomposition of deformation gradient. Theor. Appl. Mech. 28(29), 379–399 (2002)
Warner, M., Terentjev, E.: Liquid Crystal Elastomers. Oxford University Press, Oxford (2003)
White, T.J., Broer, D.J.: Programmable and adaptive mechanics with liquid crystal polymer networks and elastomers. Nat. Mater. 14(11), 1087 (2015)
Acknowledgements
Open Access funding provided by Projekt DEAL. The authors are grateful for the support by the DFG in the context of TU Dresden’s Institutional Strategy “The Synergetic University”.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix
Appendix
This appendix contains some supplementary calculations for Sect. 4.3. The main problem is to obtain a semi-explicit characterization of the torsion function \(\varphi _{S}\), see (33), where \(S=(-1,1)^{2}\) is the unit cube. We provide this characterization in Sect. A.2.
1.1 A.1 Supplementary Calculations for Sect. 4.3
-
Calculations for \(k_{i}\), \(i=1,2,3\), i.e., the preferred infinitesimal stretch and bending. Set \(B(n)=c_{1}\operatorname{Id}+c_{2}n\otimes n\) where \(n=n(x_{3})\) and \(|n|=1\) a.e. By Lemma 4.1,
$$\begin{aligned} b_{1}(n)=&\beta _{\gamma }\int _{S} (c_{1}+c_{2} n_{1}^{2}(x_{3}))\,dx_{2} \,dx_{3}=4\beta _{\gamma }c_{1}+2\beta _{\gamma }c_{2} \int _{-1}^{1}n_{1}^{2}(x_{3}) \,dx_{3}, \\b_{2}(n)=&-\beta _{\gamma }\int _{S} x_{2}(c_{1}+c_{2} n_{1}^{2}(x_{3})) \,dx_{2}\,dx_{3}=0, \\b_{3}(n)=&-\beta _{\gamma }\int _{S} x_{3}(c_{1}+c_{2} n_{1}^{2}(x_{3})) \,dx_{2}\,dx_{3}=-2c_{2} \beta _{\gamma }\int _{-1}^{1} x_{3} n_{1}^{2}(x_{3}) \,dx_{3}. \end{aligned}$$Using \(n_{\vartheta }^{(S)}(x)\cdot e_{1}=n_{\vartheta }^{(T)}(x)\cdot e_{1}= \cos (\vartheta +\frac{\pi }{4} x_{3})\), \(c_{1}=\frac{\bar{r}}{3}\) and \(c_{2}=-\bar{r}\), we easily deduce the claimed values for \(k(n_{\vartheta }^{(S)})\cdot e_{i}\) and \(k(n_{\vartheta }^{(T)})\cdot e_{i}\) with \(i=1,2,3\).
-
Calculations for \(k_{4}\), i.e., the preferred twist. Here we have to distinguish between splay bend and twist.
‘Splay bend’: We claim \(b_{4}(n_{\vartheta }^{(S)})=0\). Note that \(n_{\vartheta }^{(S)}\cdot e_{2}\equiv 0\) for all \(\vartheta \). Hence, \(B(n_{\vartheta }^{(S)})_{12}=B(n_{\vartheta }^{(S)})_{21}=0\), \(B(n_{\vartheta }^{(S)})_{13}=B(n_{\vartheta }^{(S)})_{31}=\bar{r}(n_{\vartheta }^{(S)}\cdot e_{1}) (n_{\vartheta }^{(S)}\cdot e_{3})\) and Lemma 4.1 yield
$$\begin{aligned} b_{4}(n_{\vartheta }^{(S)})=&-2\bar{r}\langle \mu \rangle _{ \operatorname{hom}}\int _{S} (\partial _{3} \varphi _{S} +x_{2})(n_{\vartheta }^{(S)}(x_{3})\cdot e_{1})(n_{\vartheta }^{(S)}(x_{3})\cdot e_{3}) \,dx_{2}\,dx_{3}=0, \end{aligned}$$where the last equality follows from the Euler-Lagrange equation for \(\varphi _{S}\) tested with \(\phi (\bar{x}):= \int _{0}^{x_{3}} (n_{\vartheta }^{(S)}(s)\cdot e_{1})(n_{\vartheta }^{(S)}(s)\cdot e_{3})\,ds\).
‘Twist’: We show that
$$ b_{4}(n_{\vartheta }^{(T)})=-\bar{r} c_{S}\langle \mu \rangle _{ \operatorname{hom}}\cos (2\vartheta )\qquad \text{with}\quad c_{S}:= \frac{32}{\pi ^{3}}(2\tanh (\tfrac{\pi }{2})-\pi )< 0. $$(52)For this, we use an explicit expression of the torsion function \(\varphi _{S}\) in case of the square, see Sect. A.2. We claim that,
$$\begin{aligned} \int _{-1}^{1} ( \varphi _{S}(1,x_{3})-\varphi _{S}(-1,x_{3})) - 2x_{3}) \sin (2\vartheta +\tfrac{\pi }{2}x)\,dx=c_{S} \cos (2\vartheta ), \end{aligned}$$(53)where \(c_{S}\) is given as in (52). Before proving the identity (53), we observe that (53) implies (52). Indeed, \(B(n_{\vartheta }^{(T)})_{12}=B(n_{\vartheta }^{(T)})_{21}=-\bar{r} \cos ( \vartheta +\frac{\pi }{4}x_{3})\sin (\vartheta +\frac{\pi }{4}x_{3})=- \frac{\bar{r}}{2}\sin (2\vartheta +\frac{\pi }{2}x_{3})\), \(B(n_{\vartheta }^{(T)})_{13}=B(n_{\vartheta }^{(T)})_{31}=0\) and Lemma 4.1 yield
$$\begin{aligned} b_{4}(n_{\vartheta }^{(T)})=&-\bar{r} \langle \mu \rangle _{ \operatorname{hom}}\int _{S} (\partial _{2} \varphi _{S}(\bar{x}) - x_{3}) \sin (\tfrac{\pi }{2}x_{3}+2\vartheta )\,d\bar{x} \\ =&-\bar{r} \langle \mu \rangle _{\operatorname{hom}}\int _{-1}^{1} ( \varphi _{S}(1,x_{3})-\varphi _{S}(-1,x_{3})) - 2x_{3})\sin (2 \vartheta +\tfrac{\pi }{2}x_{3})\,dx_{3} \\ =&-\bar{r} c_{S}\langle \mu \rangle _{\operatorname{hom}}\cos (2 \vartheta ). \end{aligned}$$Next, we provide the argument for (53). We observe that, by Lemma A.1 below,
$$\begin{aligned} &\varphi _{S}(1,x)-\varphi _{S}(-1,x) \\ =&\sum _{n=1}^{\infty }A_{n} (\cosh (n\pi )-1)\left (\cos ( \tfrac{n\pi }{2}(1+x))-\cos (\tfrac{n\pi }{2}(1-x))\right ) \\ &+\sum _{n=1}^{\infty }A_{n}\left (\cosh (\tfrac{n\pi }{2}(1+x))-\cosh ( \tfrac{n\pi }{2}(1-x))\right )\left (1-\cos (n\pi )\right ), \end{aligned}$$(54)where \(A_{n}=\frac{-16}{n^{3}\pi ^{3}\sinh (n\pi )} \begin{cases} 1&\text{if }n\text{ is odd} \\ 0&\text{if }n\text{ is even}\end{cases} \). The identity \(\cos (\tfrac{n\pi }{2}(1-x))=\cos (\tfrac{n\pi }{2}(1+x)-n\pi )\), (54) and \(A_{n}=0\) for even values of \(n\) imply
$$\begin{aligned} \varphi _{S}(1,x)-\varphi _{S}(-1,x) =&2\sum _{n=1}^{\infty }A_{n} ( \cosh (n\pi )-1)\cos (\tfrac{n\pi }{2}(1+x)) \\ &+2\sum _{n=1}^{\infty }A_{n}\left (\cosh (\tfrac{n\pi }{2}(1+x))- \cosh (\tfrac{n\pi }{2}(1-x))\right ). \end{aligned}$$(55)Straightforward calculations yield for every \(n\in \mathbb{N}\)
$$\begin{aligned} &\int _{-1}^{1}\cos (\tfrac{2n-1}{2}\pi (1+x))\sin (\tfrac{\pi }{2}x+2 \vartheta )\,dx= \textstyle\begin{cases} -\cos (2\vartheta )&\text{if $n=1$,} \\ 0&\text{if $n\geq 2$} \end{cases}\displaystyle \\ &\int _{-1}^{1}\left (\cosh (\tfrac{2n-1}{2}\pi (1+x))-\cosh ( \tfrac{2n-1}{2}\pi (1-x))\right )\sin (\tfrac{\pi }{2}x+2\vartheta )\,dx \\ =&\frac{2(2n-1)}{1+(2n-1)^{2}}\frac{2}{\pi }\sinh ((2n-1)\pi )\cosh (2 \vartheta ). \end{aligned}$$Next, we plug the above two identities into (55) and obtain
$$\begin{aligned} &\int _{-1}^{1} (\varphi _{S} (1,x)-\varphi _{S}(-1,x))\sin ( \tfrac{\pi }{2}x+2\vartheta )\,dx \\ =&-2 A_{1}(\cosh (\pi )-1)\cos (2\vartheta )+2\sum _{n=1}^{\infty }A_{2n-1} \frac{2(2n-1)}{1+(2n-1)^{2}}\frac{2}{\pi }\sinh ((2n-1)\pi )\cos (2 \vartheta ) \\ =&32 \cos (2\vartheta ) \left ( \frac{\cosh (\pi )-1}{\pi ^{3} \sinh (\pi )}-\frac{4}{\pi ^{4}}\sum _{n=1}^{\infty }\frac{1}{(2n-1)^{2}(1+(2n-1)^{2})}\right ) \\ =&32 \cos (2\vartheta ) \left ( \frac{\cosh (\pi )-1}{\pi ^{3} \sinh (\pi )}-\frac{1}{2\pi ^{3}}(\pi -2 \tanh (\tfrac{\pi }{2})\right ) \\ =&\frac{32}{\pi ^{3}} \cos (2\vartheta )\left (2\tanh (\tfrac{\pi }{2})- \tfrac{\pi }{2}\right ). \end{aligned}$$Combining the last equality with \(\int _{-1}^{1}x\sin (\tfrac{\pi }{2}x+2\vartheta )\,dx= \frac{8}{\pi ^{2}}\cos (2\vartheta )\), we obtain (53).
1.2 A.2 The Torsion Function for the Square
In this section, in contrast to all other parts of the paper, we use the notation \(x=(x_{1},x_{2})\in \mathbb{R}^{2}\).
Lemma A.1
Set \(Q=(-1,1)^{2}\). The unique function \(\varphi _{Q}\)satisfying
and can be written as
where \(R:=e_{1}\otimes e_{2} - e_{2} \otimes e_{1}\)and
with
where the series in (58) should be interpreted as a strong \(H^{1}(Q)\)limit of the partial sums.
Proof
Step 1. For \(N\in \mathbb{N}\), we define \(\phi ^{N}\in C^{\infty }(\mathbb{R}^{2})\) as
where \(A_{n}\) is given as in (59). We claim that \(\phi ^{N}\to \phi \) strongly in \(H^{1}(Q)\), where \(\phi \) is the unique weak solution of the Neumann boundary value problem
with zero mean, i.e., \(\int _{Q} \phi \,dx=0\) and where \(\nu \) denotes the outer normal to \(\partial Q\).
Indeed, by construction we have \(\int _{Q} \phi ^{N}=0\) for every \(N\in \mathbb{N}\). To show that \((\phi ^{N})\) is a Cauchy sequence in \(H^{1}(Q)\), we observe that for \(N_{1},N_{2}\in \mathbb{N}\) with \(N_{2}>N_{1}\)
Appealing to \(\int _{Q} \phi ^{N}=0\) and the Poincaré inequality, we obtain that \((\phi ^{N})\) is a Cauchy sequence in \(H^{1}(Q)\), and thus there exists \(\phi \in H^{1}(Q)\) such that \(\lim _{N\to \infty } \|\phi ^{N}-\phi \|_{H^{1}(Q)}=0\). Moreover, by construction \(\phi _{N}\) is harmonic on \(Q\) for each \(N\in \mathbb{N}\) and it holds \(\nabla \phi ^{N} \cdot \nu =0\) on \((\partial Q)\setminus (\{1\}\times (-1,1))\) for every \(N\in \mathbb{N}\) and for all \(x\in \{1\}\times (-1,1)\)
Altogether, we have for all \(v\in C^{\infty }(Q)\)
Hence, using \(\nabla \phi ^{N}\to \nabla \phi \) in \(L^{2}(Q)\) and \(f^{N}\to f\) with \(f(x)=x\) in \(L^{2}(-1,1)\), we obtain
which is precisely the weak formulation of (60).
Step 2. Conclusion.
In view of Step 1, \(\varphi _{Q}\) given as in (57) satisfy and (in the weak sense)
where \(\nu \) denotes the outer normal to \(\partial Q\). Since (61) is the Euler-Lagrange equation for (56) the claim follows. □
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Bauer, R., Neukamm, S. & Schäffner, M. Derivation of a Homogenized Bending–Torsion Theory for Rods with Micro-Heterogeneous Prestrain. J Elast 141, 109–145 (2020). https://doi.org/10.1007/s10659-020-09777-6
Received:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10659-020-09777-6