Methodology for Carrying out Measurements of the Tombolo Geomorphic Landform Using Unmanned Aerial and Surface Vehicles near Sopot Pier, Poland

 ,
,  , and
, and 
Abstract
:
1. Introduction
2. Materials and Methods
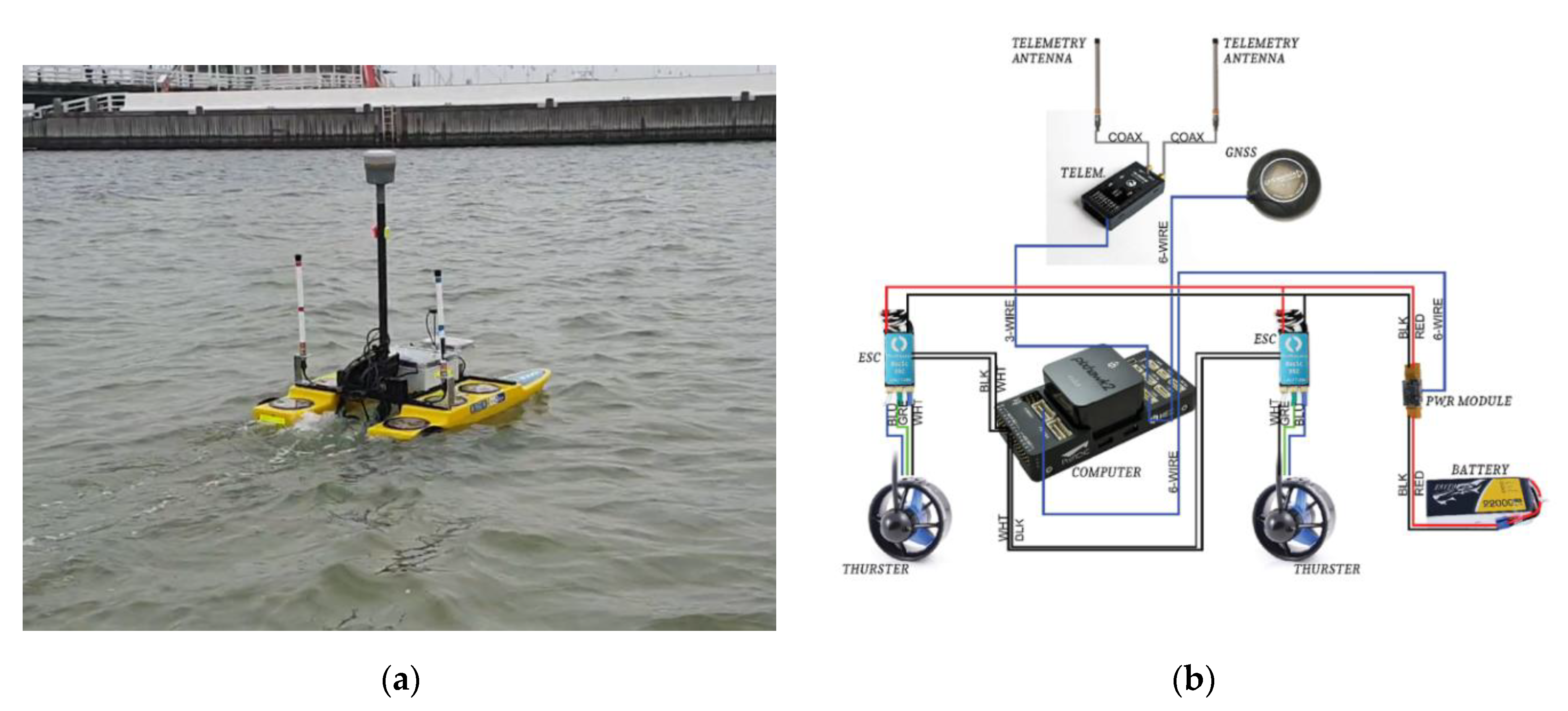
2.1. Hydrographic Surveys Carried Out Using a USV
- (1)
- Calibration (taring) of the vertical echo sounder.
- (2)
- Measurement of the vertical distribution of the speed of sound in water.
- (3)
- Measurement of the draft of the echo sounder transducer.
- (1)
- Inclinometer calibration.
- (2)
- Magnetometer calibration.
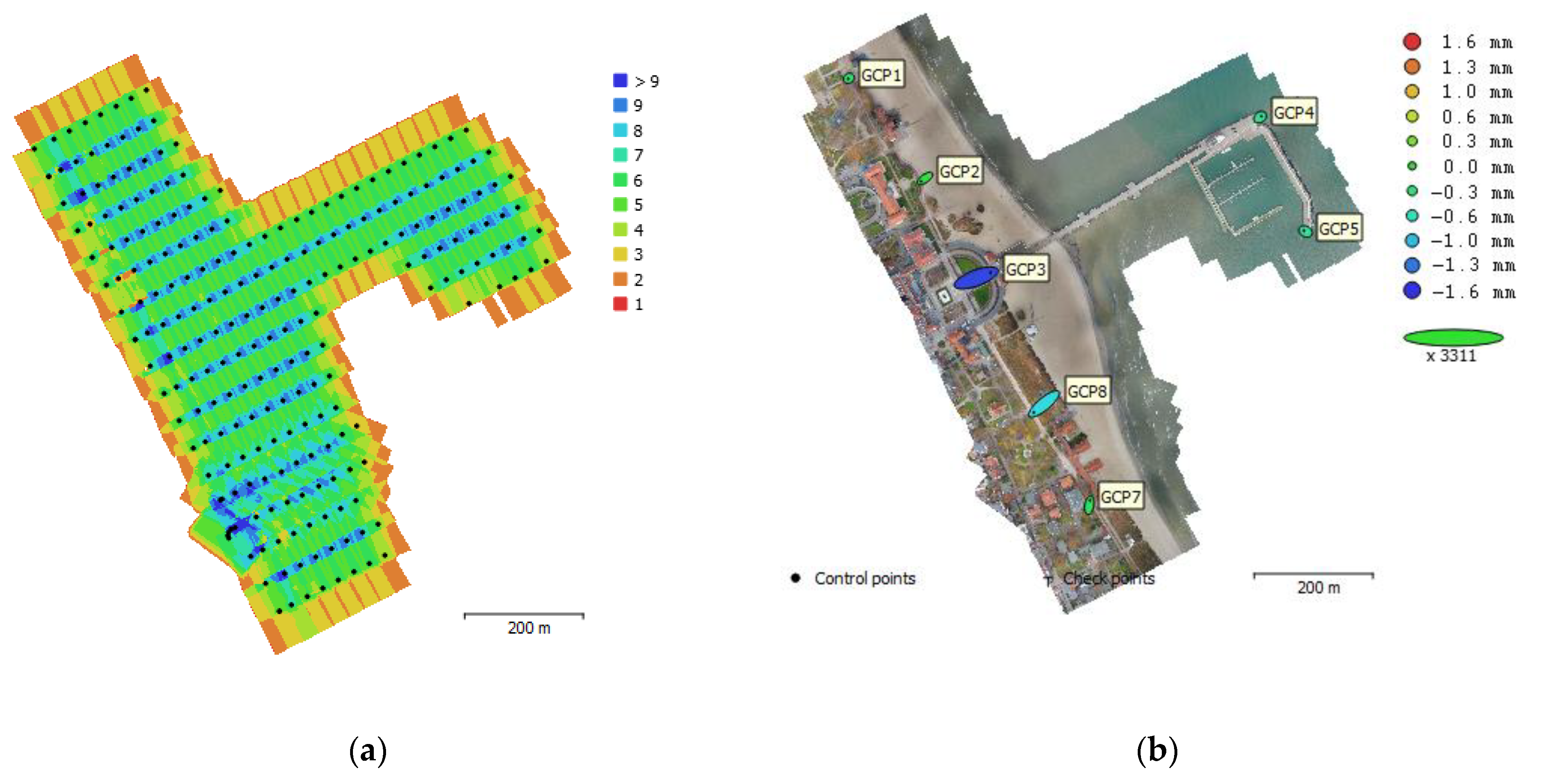
2.2. Photogrammetric Measurements Carried Out Using a UAV
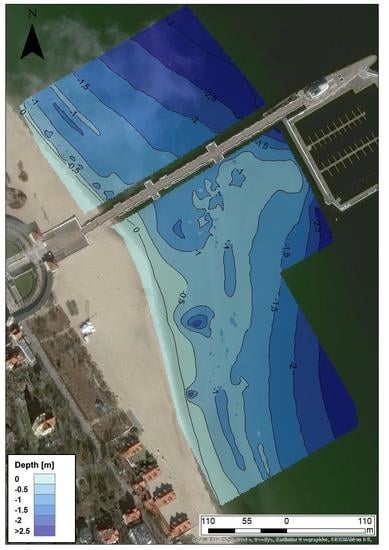
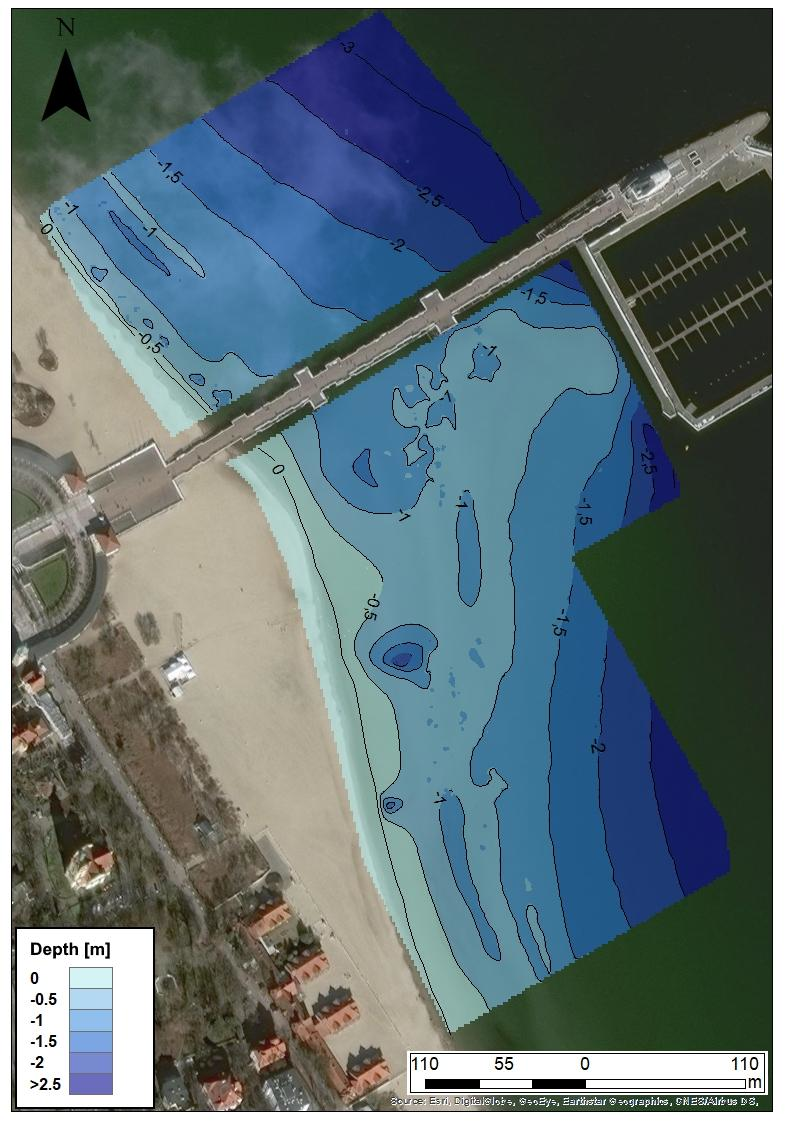
3. Results
4. Discussion
Author Contributions
Funding
Conflicts of Interest
References
- Lane, S.N.; Richards, K.S.; Chandler, J.H. Developments in monitoring and modelling small-scale river bed topography. Earth Surf. Process. Landf. 1994, 19, 349–368. [Google Scholar] [CrossRef]
- Westaway, R.M.; Lane, S.N.; Hicks, D.M. Remote Sens. of clear-water, shallow, gravel-bed rivers using digital photogrammetry. Photogramm. Eng. Remote Sens. 2001, 67, 1271–1282. [Google Scholar]
- Koljonen, S.; Huusko, A.; Mäki-Petäys, A.; Louhi, P.; Muotka, T. Assessing habitat suitability for juvenile Atlantic salmon in relation to in-stream restoration and discharge variability. Restor. Ecol. 2012, 21, 344–352. [Google Scholar] [CrossRef]
- Baptista, P.; Bastos, L.; Bernardes, C.; Cunha, T.; Dias, J. Monitoring sandy shores morphologies by DGPS—A practical tool to generate digital elevation models. J. Coast. Res. 2008, 24, 1516–1528. [Google Scholar] [CrossRef]
- Specht, C.; Specht, M.; Cywiński, P.; Skóra, M.; Marchel, Ł.; Szychowski, P. A new method for determining the territorial sea baseline using an unmanned, hydrographic surface vessel. J. Coast. Res. 2019, 35, 925–936. [Google Scholar] [CrossRef]
- Hogrefe, K.R.; Wright, D.J.; Hochberg, E.J. Derivation and integration of shallow-water bathymetry: Implications for coastal terrain modeling and subsequent analyses. Mar. Geod. 2008, 31, 299–317. [Google Scholar] [CrossRef]
- Kulawiak, M.; Chybicki, A. Application of Web-GIS and geovisual analytics to monitoring of seabed evolution in South Baltic Sea coastal areas. Mar. Geod. 2018, 41, 405–426. [Google Scholar] [CrossRef]
- Warnasuriya, T.W.S.; Gunaalan, K.; Gunasekara, S.S. Google Earth: A new resource for shoreline change estimation—Case study from Jaffna Peninsula, Sri Lanka. Mar. Geod. 2018, 41, 1–35. [Google Scholar] [CrossRef]
- Song, F.; Gong, S.; Zhou, R. Underwater topography survey and precision analysis based on depth sounder and CORS-RTK technology. IOP Conf. Ser. Mater. Sci. Eng. 2020, 780, 1–8. [Google Scholar] [CrossRef]
- Specht, C.; Weintrit, A.; Specht, M. Determination of the territorial sea baseline—Aspect of using unmanned hydrographic vessels. TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2016, 10, 649–654. [Google Scholar] [CrossRef] [Green Version]
- Stateczny, A.; Błaszczak-Bąk, W.; Sobieraj-Żłobińska, A.; Motyl, W.; Wisniewska, M. Methodology for processing of 3D multibeam sonar big data for comparative navigation. Remote Sens. 2019, 11, 2245. [Google Scholar] [CrossRef] [Green Version]
- Zwolak, K.; Wigley, R.; Bohan, A.; Zarayskaya, Y.; Bazhenova, E.; Dorshow, W.; Sumiyoshi, M.; Sattiabaruth, S.; Roperez, J.; Proctor, A.; et al. The autonomous underwater vehicle integrated with the unmanned surface vessel mapping the Southern Ionian Sea. The winning technology solution of the Shell Ocean Discovery XPRIZE. Remote Sens. 2020, 12, 1344. [Google Scholar] [CrossRef] [Green Version]
- Romano, A.; Duranti, P. Autonomous unmanned surface vessels for hydrographic measurement and environmental monitoring. In Proceedings of the FIG Working Week 2012, Rome, Italy, 6–10 May 2012. [Google Scholar]
- Stateczny, A.; Kazimierski, W.; Burdziakowski, P.; Motyl, W.; Wisniewska, M. Shore construction detection by automotive radar for the needs of autonomous surface vehicle navigation. ISPRS Int. J. Geo Inf. 2019, 8, 80. [Google Scholar] [CrossRef] [Green Version]
- Giordano, F.; Mattei, G.; Parente, C.; Peluso, F.; Santamaria, R. MicroVEGA (Micro Vessel for Geodetics Application): A marine drone for the acquisition of bathymetric data for GIS applications. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, XL-5-W5, 123–130. [Google Scholar] [CrossRef] [Green Version]
- Giordano, F.; Mattei, G.; Parente, C.; Peluso, F.; Santamaria, R. Integrating sensors into a marine drone for bathymetric 3D surveys in shallow waters. Sensors 2016, 16, 41. [Google Scholar] [CrossRef] [Green Version]
- Genchi, S.A.; Vitale, A.J.; Perillo, G.M.E.; Seitz, C.; Delrieux, C.A. Mapping topobathymetry in a shallow tidal environment using low-cost technology. Remote Sens. 2020, 12, 1394. [Google Scholar] [CrossRef]
- Mancini, F.; Dubbini, M.; Gattelli, M.; Stecchi, F.; Fabbri, S.; Gabbianelli, G. Using Unmanned Aerial Vehicles (UAV) for high-resolution reconstruction of topography: The structure from motion approach on coastal environments. Remote Sens. 2013, 5, 6880–6898. [Google Scholar] [CrossRef] [Green Version]
- Zanutta, A.; Lambertini, A.; Vittuari, L. UAV photogrammetry and ground surveys as a mapping tool for quickly monitoring shoreline and beach changes. J. Mar. Sci. Eng. 2020, 8, 52. [Google Scholar] [CrossRef] [Green Version]
- Nikolakopoulos, K.G.; Lampropoulou, P.; Fakiris, E.; Sardelianos, D.; Papatheodorou, G. Synergistic use of UAV and USV data and petrographic analyses for the investigation of beachrock formations: A case study from Syros Island, Aegean Sea, Greece. Minerals 2018, 8, 534. [Google Scholar] [CrossRef] [Green Version]
- Turner, I.L.; Harley, M.D.; Drummond, C.D. UAVs for coastal surveying. Coast. Eng. 2016, 114, 19–24. [Google Scholar] [CrossRef]
- Bandini, F.; Olesen, D.; Jakobsen, J.; Kittel, C.M.M.; Wang, S.; Garcia, M.; Bauer-Gottwein, P. Technical note: Bathymetry observations of inland water bodies using a tethered single-beam sonar controlled by an unmanned aerial vehicle. Hydrol. Earth Syst. Sci. 2018, 22, 4165–4181. [Google Scholar] [CrossRef] [Green Version]
- Specht, C.; Świtalski, E.; Specht, M. Application of an autonomous/unmanned survey vessel (ASV/USV) in bathymetric measurements. Pol. Marit. Res. 2017, 24, 36–44. [Google Scholar] [CrossRef] [Green Version]
- Masnicki, R.; Specht, C.; Mindykowski, J.; Dąbrowski, P.; Specht, M. Accuracy analysis of measuring X-Y-Z coordinates with regard to the investigation of the tombolo effect. Sensors 2020, 20, 1167. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Specht, C.; Mindykowski, J.; Dąbrowski, P.; Maśnicki, R.; Marchel, Ł.; Specht, M. Metrological aspects of the tombolo effect investigation—Polish case study. In Proceedings of the 2019 IMEKO TC-19 International Workshop on Metrology for the Sea (IMEKO 2019), Genova, Italy, 3–5 October 2019. [Google Scholar]
- Specht, M.; Specht, C.; Mindykowski, J.; Dąbrowski, P.; Maśnicki, R.; Makar, A. Geospatial modeling of the tombolo phenomenon in Sopot using integrated geodetic and hydrographic measurement methods. Remote Sens. 2020, 12, 737. [Google Scholar] [CrossRef] [Green Version]
- Owens, E.H. Tombolo. In Beaches and Coastal Geology, Encyclopedia of Earth Science, 1984 ed.; Springer: Boston, MA, USA, 1982. [Google Scholar]
- De Mahiques, M.M. Tombolo. In Encyclopedia of Estuaries. Encyclopedia of Earth Sciences Series, 2016 ed.; Kennish, M.J., Ed.; Springer: Dordrecht, The Netherlands, 2016; pp. 713–714. [Google Scholar]
- Benac, Č.; Bočić, N.; Ružić, I. On the origin of both a recent and submerged tombolo on Prvić Island in the Kvarner area (Adriatic Sea, Croatia). Geol. Croat. 2019, 72, 195–203. [Google Scholar] [CrossRef]
- Otto, J.; Smith, M. Geomorphological mapping. In Geomorphological Techniques; Clarke, L.E., Nield, J.M., Eds.; British Society for Geomorphology: London, UK, 2013; pp. 1–10. [Google Scholar]
- Booij, N.; Holthuijsen, L.H.; Ris, R.C. The “SWAN” wave model for shallow water. In Proceedings of the 25th International Conference on Coast. Eng. (ICCE 1996), Orlando, FL, USA, 2–6 September 1996. [Google Scholar]
- Hansom, J.D. St Ninian’s tombolo, Shetland. In Coastal Geomorphology of Great Britain; May, V.J., Hansom, J.D., Eds.; Joint Nature Conservation Committee: Peterborough, UK, 2003; pp. 458–462. [Google Scholar]
- Vu, M.T.; Lacroix, Y.; Nguyen, V.T. Empirical equilibrium beach profiles along the eastern tombolo of Giens. J. Mar. Sci. Appl. 2018, 17, 241–253. [Google Scholar] [CrossRef]
- Schwartz, M.L.; Grano, O.; Pyokari, M. Spits and tombolos in the southwest archipelago of Finland. J. Coast. Res. 1989, 5, 443–451. [Google Scholar]
- Kim, H. Three-dimensional sediment transport model. PhD Thesis, University of Liverpool, Liverpool, UK, 1993. [Google Scholar]
- O’Connor, B.A.; Nicholson, J. A three-dimensional model of suspended particulate sediment transport. Coast. Eng. 1998, 12, 157–174. [Google Scholar] [CrossRef]
- Kuroiwa, M.; Kamphuis, J.W.; Kuchiishi, T.; Matsubara, Y.; Noda, H. Medium-term Q-3D coastal area model with shoreline change around coastal structures. In Proceedings of the 29th International Conference on Coast. Eng. (ICCE 2004), Lisbon, Portugal, 19–24 September 2004. [Google Scholar]
- Watanabe, A.; Maruyama, K.; Shimizu, T.; Sakakiyama, T. Numerical prediction model of three-dimensional beach deformation around a structure. Coast. Eng. Jpn. 1986, 29, 179–194. [Google Scholar] [CrossRef]
- Shimizu, T.; Kumagai, T.; Watanabe, A. Improved 3-D beach evolution model coupled with the shoreline model (3D-SHORE). In Proceedings of the 25th International Conference on Coast. Eng. (ICCE 1996), Orlando, FL, USA, 2–6 September 1996. [Google Scholar]
- Jörissen, J.G.L. Strandhoofden Gemodelleerd in Delft3D-RAM: Strandhoofden Als Instrument Voor Het Regelen van Het Langstransport. Master’s Thesis, Delft University of Technology, Delft, The Netherlands, 2001. [Google Scholar]
- Nam, P.T. Numerical Model of Beach Topography Evolution due to Waves and Currents. Special Emphasis on Coastal Structures. Available online: https://pdfs.semanticscholar.org/c5af/bff0cb81a3dff8f2cc3528016c85bb1b1107.pdf?_ga=2.233758174.1954626850.1580128302-234920152.1580128302 (accessed on 19 March 2020).
- Kuchiishi, T.; Kato, K.; Kuroiwa, M.; Matsubara, Y.; Noda, H. Applicability of 3D morphodynamic model with shoreline change using a quasi-3D nearshore current model. In Proceedings of the 14th International Offshore and Polar Engineering Conference (ISOPE 2004), Toulon, France, 23–28 May 2004. [Google Scholar]
- Roelvink, D.; Giles, L.; van der Wegen, M. Morphological modelling of the wet-dry interface at various timescales. In Proceedings of the 7th International Conference on Hydroscience and Engineering (ICHE 2006), Philadelphia, PA, USA, 10–13 September 2006. [Google Scholar]
- van Koningsveld, M.; van Kessel, T.; Walstra, D.-J.R. A hybrid modelling approach to coastal morphology. In Proceedings of the 5th Coastal Dynamics International Conference (CD 2005), Barcelona, Spain, 4–8 April 2005. [Google Scholar]
- Kim, H.; Lee, S.; Park, D.; Lim, H.S. Simulation of tombolo evolution by using CST3D-WA. Vibroengineering PROCEDIA 2017, 12, 196–201. [Google Scholar]
- Specht, M.; Specht, C.; Wąż, M.; Dąbrowski, P.; Skóra, M.; Marchel, Ł. Determining the variability of the territorial sea baseline on the example of waterbody adjacent to the municipal beach in Gdynia. Appl. Sci. 2019, 9, 3867. [Google Scholar] [CrossRef] [Green Version]
- IMGW-PIB. Fishermans Forecast. Available online: http://baltyk.pogodynka.pl/index.php?page=2&subpage=6&data=25 (accessed on 19 March 2020). (In Polish).
- Ostrowska, M.; Darecki, M.; Krężel, A.; Ficek, D.; Furmańczyk, K. Practical applicability and preliminary results of the Baltic environmental satellite Remote Sens. system (Satbałtyk). Pol. Marit. Res. 2015, 22, 43–49. [Google Scholar] [CrossRef] [Green Version]
- IMGW-PIB. Pogodynka.pl—IMGW-PIB Weather Service. Available online: http://pogodynka.pl/ (accessed on 19 March 2020). (In Polish).
- Specht, M.; Specht, C.; Wąż, M.; Naus, K.; Grządziel, A.; Iwen, D. Methodology for performing territorial sea baseline measurements in selected waterbodies of Poland. Appl. Sci. 2019, 9, 3053. [Google Scholar] [CrossRef] [Green Version]
- International Hydrographic Organization. IHO Standards for Hydrographic Surveys, 5th ed.; Special Publication No. 44; IHO: Monte Carlo, Monaco, 2008. [Google Scholar]
- National Oceanic and Atmospheric Administration. NOS Hydrographic Surveys Specifications and Deliverables; NOAA: Silver Spring, MD, USA, 2017. [Google Scholar]
- United States Army Corps of Engineers. EM 1110-2-1003 USACE Standards for Hydrographic Surveys; USACE: Washington, DC, USA, 2013.
- Kierzkowski, W. Marine Measurements. Part. I. Hydrographic Measurements; Polish Naval Academy Publishing House: Gdynia, Poland, 1984; Volume 1. (In Polish) [Google Scholar]
- Sciortino, J.A. Fishing Harbour Planning, Construction and Management; Food and Agriculture Organization of the United Nations: Rome, Italy, 2010. [Google Scholar]
- Stenborg, E. The Swedish parallel sounding method state of the art. Int. Hydrogr. Rev. 1987, 64, 7–14. [Google Scholar]
- Specht, M.; Specht, C.; Lasota, H.; Cywiński, P. Assessment of the steering precision of a hydrographic Unmanned Surface Vessel (USV) along sounding profiles using a low-cost multi-Global Navigation Satellite System (GNSS) receiver supported autopilot. Sensors 2019, 19, 3939. [Google Scholar] [CrossRef] [Green Version]
- Grządziel, A. Single beam echo sounder in hydrographic surveys. Marit. Rev. 2006, 4, 11–28. (In Polish) [Google Scholar]
- Wikipedia, the Free Encyclopedia. PID Controller. Available online: https://en.wikipedia.org/wiki/PID_controller#Manual_tuning (accessed on 19 March 2020). (In Polish).
- Burdziakowski, P. Low cost real time UAV stereo photogrammetry modelling technique—Accuracy considerations. E3S Web Conf. 2018, 63, 1–5. [Google Scholar] [CrossRef]
- Burdziakowski, P. UAV in todays photogrammetry—Application areas and challenges. In Proceedings of the 18th International Multidisciplinary Scientific GeoConference (SGEM 2018), Albena, Bulgaria, 2–8 July 2018. [Google Scholar]
- Dandois, J.P.; Olano, M.; Ellis, E.C. Optimal altitude, overlap, and weather conditions for computer vision UAV estimates of forest structure. Remote Sens. 2015, 7, 13895–13920. [Google Scholar] [CrossRef] [Green Version]
- Yoo, Y.H.; Choi, J.W.; Choi, S.K.; Jung, S.H. Quality evaluation of orthoimage and DSM based on fixed-wing UAV corresponding to overlap and GCPs. J. Korean Soc. Geospat. Inf. Syst. 2016, 24, 3–9. [Google Scholar]
- Torres-Sánchez, J.; López-Granados, F.; Borra-Serrano, I.; Manuel Peña, J. Assessing UAV-collected image overlap influence on computation time and digital surface model accuracy in olive orchards. Precis. Agric. 2018, 19, 115–133. [Google Scholar] [CrossRef]
- Burdziakowski, P. Towards precise visual navigation and direct georeferencing for MAV using ORB-SLAM2. In Proceedings of the 2017 Baltic Geodetic Congress (BGC Geomatics 2017), Gdańsk, Poland, 22–25 June 2017. [Google Scholar]
- Council of Ministers of the Republic of Poland. Ordinance of the Council of Ministers of 15 October 2012 on the National Spatial Reference System; Council of Ministers of the Republic of Poland: Warsaw, Poland, 2012. (In Polish)
- Kogut, T.; Niemeyer, J.; Bujakiewicz, A. Neural networks for the generation of sea bed models using airborne lidar bathymetry data. Geod. Cartogr. 2016, 65, 41–53. [Google Scholar] [CrossRef] [Green Version]
- Sassais, R.; Makar, A. Methods to generate numerical models of terrain for spatial ENC presentation. Annu. Navig. 2011, 18, 69–81. [Google Scholar]
- Wu, C.Y.; Mossa, J.; Mao, L.; Almulla, M. Comparison of different spatial interpolation methods for historical hydrographic data of the lowermost Mississippi River. Ann. GIS 2019, 25, 133–151. [Google Scholar] [CrossRef]
- Stateczny, A.; Gronska-Sledz, D.; Motyl, W. Precise bathymetry as a step towards producing bathymetric electronic navigational charts for comparative (terrain reference) navigation. J. Navig. 2019, 72, 1623–1632. [Google Scholar] [CrossRef]
- Kurowski, M.; Thal, J.; Damerius, R.; Korte, H.; Jeinsch, T. Automated survey in very shallow water using an unmanned surface vehicle. IFAC PapersOnLine 2019, 52, 146–151. [Google Scholar] [CrossRef]
- Li, C.; Jiang, J.; Duan, F.; Liu, W.; Wang, X.; Bu, L.; Sun, Z.; Yang, G. Modeling and experimental testing of an unmanned surface vehicle with rudderless double thrusters. Sensors 2019, 19, 2051. [Google Scholar] [CrossRef] [Green Version]
- Mu, D.; Wang, G.; Fan, Y.; Qiu, B.; Sun, X. Adaptive trajectory tracking control for underactuated unmanned surface vehicle subject to unknown dynamics and time-varing disturbances. Appl. Sci. 2018, 8, 547. [Google Scholar] [CrossRef] [Green Version]
- Stateczny, A.; Burdziakowski, P.; Najdecka, K.; Domagalska-Stateczna, B. Accuracy of trajectory tracking based on nonlinear guidance logic for hydrographic unmanned surface vessels. Sensors 2020, 20, 832. [Google Scholar] [CrossRef] [Green Version]
- Yang, Y.; Li, Q.; Zhang, J.; Xie, Y. Iterative learning-based path and speed profile optimization for an unmanned surface vehicle. Sensors 2020, 20, 439. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Angnuureng, D.B.; Jayson-Quashigah, P.-N.; Almar, R.; Stieglitz, T.C.; Anthony, E.J.; Aheto, D.W.; Addo, K.A. Application of shore-based video and unmanned aerial vehicles (drones): Complementary tools for beach studies. Remote Sens. 2020, 12, 394. [Google Scholar] [CrossRef] [Green Version]
- Burdziakowski, P.; Tysiąc, P. Combined close range photogrammetry and terrestrial laser scanning for ship hull modelling. Geosciences 2019, 9, 242. [Google Scholar] [CrossRef] [Green Version]
- Casella, E.; Drechsel, J.; Winter, C.; Benninghoff, M.; Rovere, A. Accuracy of sand beach topography surveying by drones and photogrammetry. Geo Mar. Lett. 2020, 40, 255–268. [Google Scholar] [CrossRef] [Green Version]
- Laporte-Fauret, Q.; Marieu, V.; Castelle, B.; Michalet, R.; Bujan, S.; Rosebery, D. Low-cost UAV for high-resolution and large-scale coastal dune change monitoring using photogrammetry. J. Mar. Sci. Eng. 2019, 7, 63. [Google Scholar] [CrossRef] [Green Version]
- Lowe, M.K.; Adnan, F.A.F.; Hamylton, S.M.; Carvalho, R.C.; Woodroffe, C.D. Assessing reef-island shoreline change using UAV-derived orthomosaics and digital surface models. Drones 2019, 3, 44. [Google Scholar] [CrossRef] [Green Version]
- Kacprzak, M.; Wodziński, K. Execution of photo mission by manned aircraft and unmanned aerial vehicle. Trans. Inst. Aviat. 2016, 2, 130–141. (In Polish) [Google Scholar] [CrossRef]
- Witek, M.; Jeziorska, J.; Niedzielski, T. Possibilities of using unmanned air photogrammetry to identify anthropogenic transformations in river channel. Landf. Anal. 2013, 24, 115–126. (In Polish) [Google Scholar] [CrossRef]
- Erena, M.; Atenza, J.F.; García-Galiano, S.; Domínguez, J.A.; Bernabé, J.M. Use of drones for the topo-bathymetric monitoring of the reservoirs of the Segura River Basin. Water 2019, 11, 445. [Google Scholar] [CrossRef] [Green Version]
- Specht, C.; Weintrit, A.; Specht, M.; Dąbrowski, P. Determination of the territorial sea baseline—Measurement aspect. IOP Conf. Ser. Earth Environ. Sci. 2017, 95, 1–10. [Google Scholar] [CrossRef] [Green Version]
- Sopot City Hall. 2016: Tombolo Connects the Beach with the Marina. Available online: https://sopot.gmina.pl/raport-marina-tombolo-2016/ (accessed on 19 March 2020). (In Polish).
- Sopot NaszeMiasto.pl. Sopot Beach to be Corrected again. Alignment is in Progress. Available online: http://sopot.naszemiasto.pl/artykul/sopocka-plaza-znowu-do-poprawki-trwa-wyrownywanie-zdjecia,2253932,artgal,t,id,tm.html (accessed on 19 March 2020). (In Polish).
- Sopot NaszeMiasto.pl. Sopot is Growing! The Concrete Marina forms a Sand Peninsula at the Pier. Available online: http://sopot.naszemiasto.pl/artykul/sopot-sie-powieksza-betonowa-marina-tworzy-przy-molu,1772082,artgal,t,id,tm.html (accessed on 19 March 2020). (In Polish).
- Trójmiasto.Wyborcza.pl. A Sand Island has Grown up at the Pier in Sopot. The Sand on the Cliff in Gdynia is Decreasing. Available online: http://trojmiasto.wyborcza.pl/trojmiasto/1,35612,20860078,wyrosla-piaskowa-wyspa-przy-molo-w-sopocie-ubywa-za-to-piasku.html (accessed on 19 March 2020). (In Polish).
- Institute of Oceanology of the Polish Academy of Sciences. Conducting Research and Modeling of the Seafloor and Sea Shore near the Pier in Sopot. Available online: https://bip.umsopot.nv.pl/Download/get/id,32756.html (accessed on 9 June 2019).








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Parameter Value |
|---|---|
| Dimensions (length × width × height) [mm] | 322 × 242 × 84 |
| Weight [g] | 907 |
| Max ascent speed [m/s] | 5 |
| Max descent speed [m/s] | 3 |
| Max speed [km/h] | 72 |
| Max service ceiling [m] | 6000 |
| Max flight time [min] | 31 |
| Max hovering time [min] | 29 |
| Overall flight time [min] | 25 |
| Max flight distance [km] | 18 |
| Operating temperature range [°C] | −10 to 40 |
| Satellite positioning systems | GPS/GLONASS |
| Parameter | Parameter Value |
|---|---|
| Sensor | 1-inch CMOS Effective pixels: 20 million |
| Pixel size [μm] | 2.41 |
| Lens | Field Of View (FOV): about 77° 35 mm format equivalent: 28 mm Aperture: f/2.8–f/11 Shooting range: 1 m to ∞ |
| ISO range | 100–12800 (photo), 100–6400 (video) |
| Shutter speed | 8–1/8000 s |
| Still image size [pixels] | 5472 × 3648 |
| Still photography modes | Single shot Burst shooting: 3/5 frames Auto Exposure Bracketing (AEB): 3/5 bracketed frames at 0.7 EV Bias Interval (JPEG: 2/3/5/7/10/15/20/30/60 s, RAW: 5/7/10/15/20/30/60 s) |
| Video resolution | 4K: 3840 × 2160 24/25/30 p 2.7K: 2688 x 1512 24/25/30/48/50/60 p FHD: 1920 × 1080 24/25/30/48/50/60/120 p |
| Photo format | JPEG, DNG (RAW) |
| Video format | MP4, MOV (MPEG-4 AVC/H.264, HEVC/H.265) |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Specht, C.; Lewicka, O.; Specht, M.; Dąbrowski, P.; Burdziakowski, P. Methodology for Carrying out Measurements of the Tombolo Geomorphic Landform Using Unmanned Aerial and Surface Vehicles near Sopot Pier, Poland. J. Mar. Sci. Eng. 2020, 8, 384. https://doi.org/10.3390/jmse8060384
Specht C, Lewicka O, Specht M, Dąbrowski P, Burdziakowski P. Methodology for Carrying out Measurements of the Tombolo Geomorphic Landform Using Unmanned Aerial and Surface Vehicles near Sopot Pier, Poland. Journal of Marine Science and Engineering. 2020; 8(6):384. https://doi.org/10.3390/jmse8060384
Chicago/Turabian StyleSpecht, Cezary, Oktawia Lewicka, Mariusz Specht, Paweł Dąbrowski, and Paweł Burdziakowski. 2020. "Methodology for Carrying out Measurements of the Tombolo Geomorphic Landform Using Unmanned Aerial and Surface Vehicles near Sopot Pier, Poland" Journal of Marine Science and Engineering 8, no. 6: 384. https://doi.org/10.3390/jmse8060384