Verification of Novel Maritime Route Extraction Using Kernel Density Estimation Analysis with Automatic Identification System Data





Abstract
:1. Introduction
2. Materials and Methods
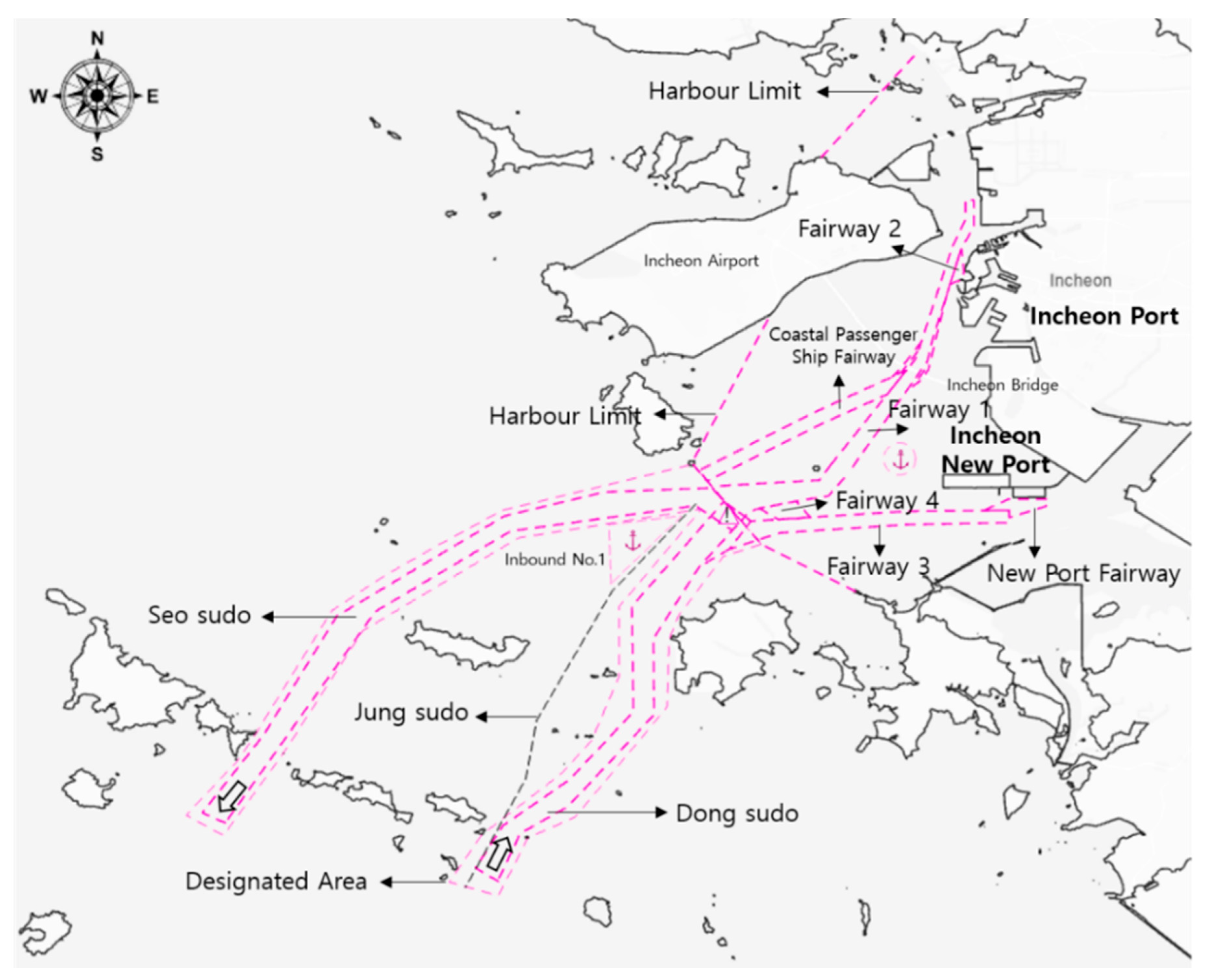
2.1. Analysis Area
2.2. AIS Data Characteristics
2.3. Novel Maritime Route Extraction Overview
2.3.1. Summary of KDE
2.3.2. Calculating KDE Using the Geographic Information System
2.3.3. Image Processing
2.3.4. Line Smoothing and Centerline Extraction
3. Results
3.1. KDE and Density Results
3.2. Novel Maritime Route Binarization
3.3. Novel Maritime Route Boundary Extraction
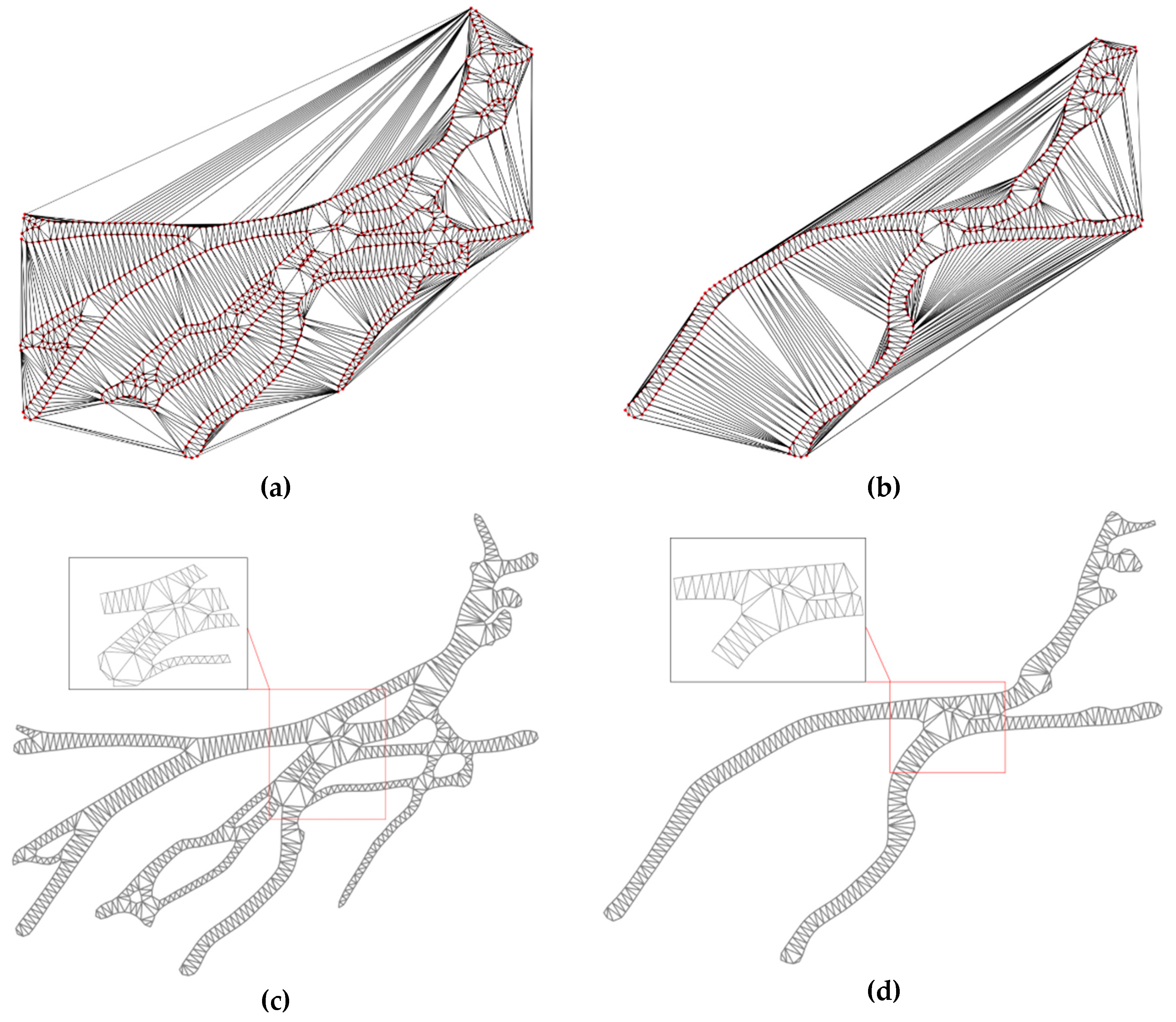
3.4. Line smoothing and Delaunay triangulation result
3.5. Novel Maritime Centerline Generation
4. Discussion
4.1. Verification of Sinuosity
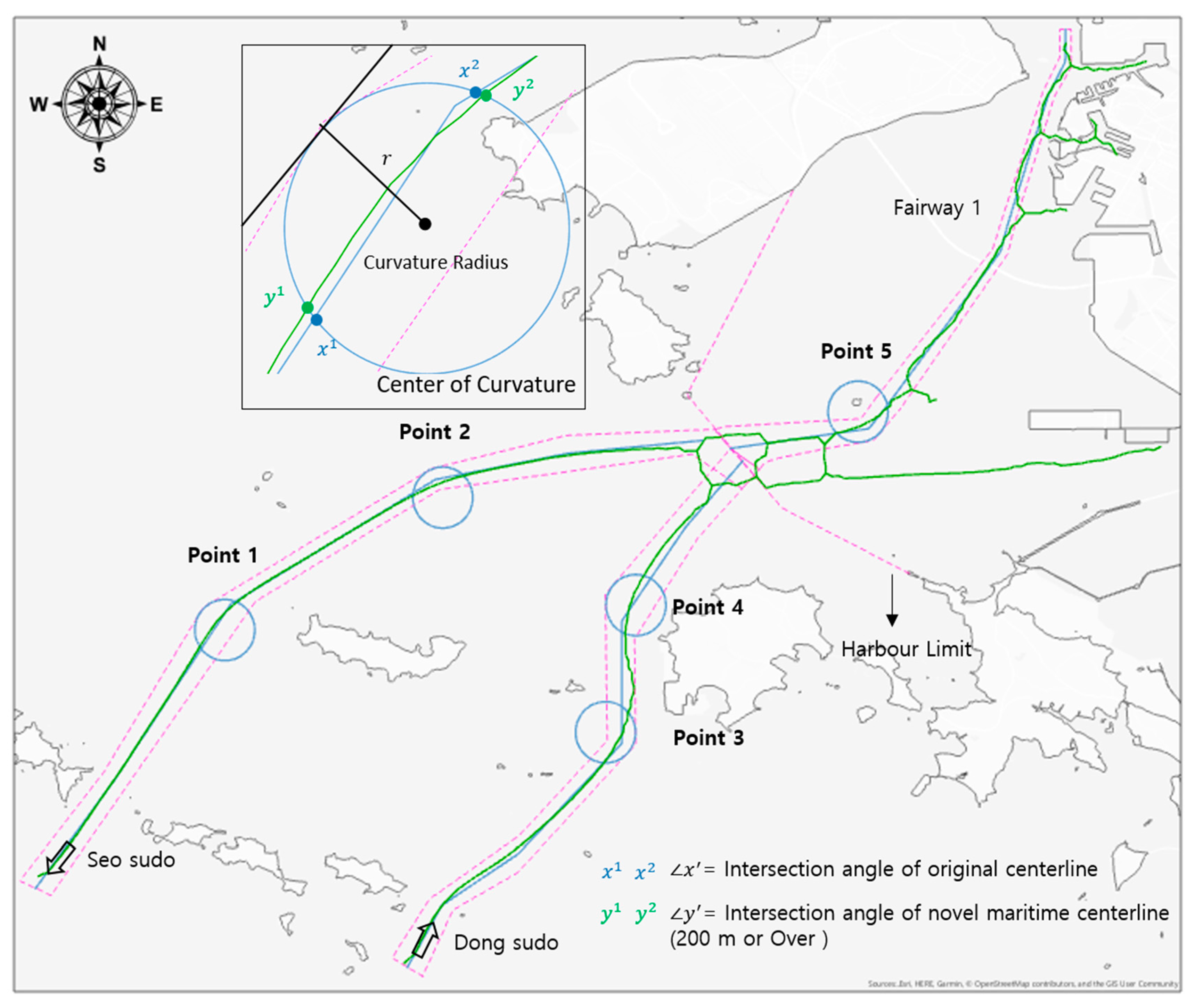
4.2. Verification of Intersection Angle
4.3. Verification of RCE
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Jinxian, W.; Dong, Y. Investigation of shipping accident injury severity and mortality. Accid. Anal. Prev. 2015, 76, 92–101. [Google Scholar]
- Debnath, A.K.; Chin, H.C. Navigational traffic conflict technique: A proactive approach to quantitative measurement of collision risks in port waters. J. Navig. 2010, 63, 137–152. [Google Scholar] [CrossRef] [Green Version]
- MOF (Ministry of Oceans and Fisheries). Harbour and Fishery Design Criteria; MOF: Sejong, Korea, 2017. [Google Scholar]
- Park, J.M. A Study on the Establishing Methods of Design Criteria of Inland Waterways in Korea. Master’s Thesis, Korea Maritime and Ocean University, Busan, Korea, 2011. [Google Scholar]
- PIANC (The world Association for Waterborne Transport Infrastructure). MarCom Working Group 121: Harbour Approach Channels—Design Guidelines; PIANC: Brussels, Belgium, 2014. [Google Scholar]
- Akten, N. Analysis of shipping casualties in the Bosphorus. J. Navig. 2004, 57, 345–356. [Google Scholar] [CrossRef]
- Robert, E.G.; Jarno, S.; Laura, R.; Heidi, K.; Floris, G.; Jakub, M.; Robin, B.; Ville, K. A method for ice-aware maritime route optimization. In Proceedings of the 2014 IEEE/ION Position, Location and Navigation Symposium—PLANS 2014, Monterey, CA, USA, 5–8 May 2014; pp. 1371–1378. [Google Scholar]
- Wei, Y.; Ai, T.; Wei, L. A method for extracting road boundary information from crowdsourcing vehicle GPS trajectories. Sensors 2018, 18, 1261. [Google Scholar]
- Zuchao, W.; Tangzhi, Y.; Min, L.; Xiaoru, Y.; Huamin, Q.; Jacky, Y.; Qianling, W. Visual exploration of sparse traffic trajectory data. IEEE Trans. Vis. Comput. Graph. 2014, 20, 1813–1821. [Google Scholar]
- James, B.; Jakob, E. Inferring road maps from global positioning system traces. J. Transp. Res. Board 2012, 2291, 61–71. [Google Scholar]
- Xuemei, L.; Yin, W.; James, B.; Jakob, E.; Yamin, Z. Mining large-scale, sparse GPS traces for map inference: Comparison of approaches. In Proceedings of the 18th ACM SIGKDD international conference on Knowledge discovery and data mining, New York, NY, USA, 12–16 August 2012; pp. 669–677. [Google Scholar]
- Mohamad, T.; Azriel, R. Building and road extraction from aerial photographs. IEEE Trans. Sys. Man Cybern. 1982, 12, 84–91. [Google Scholar]
- Volodymyr, M.; Geoffrey, E.H. Learning to Detect Roads in High-Resolution Aerial Images; University of Toronto: Toronto, ON, Canada, 2010; pp. 210–223. [Google Scholar]
- Guiling, W.; Jinlong, M.; Yanbo, H. Extraction of maritime road networks from large-scale AIS data. IEEE Access 2019, 7, 123035–123048. [Google Scholar]
- Azzeddine, B.; Ingrid, K.G.; Erik, V.; Oystein, E. AIS-Based Multiple Vessel Collision and Grounding Risk Identification based on Adaptive Safety Domain. J. Mar. Sci. Eng. 2020, 8, 5. [Google Scholar]
- Liye, Z.; Qiang, M.; Tien, F.F. Bing AIS data based spatial-temporal analyses of ship traffic in Singapore port waters. Transport. Res. Part E 2017, 129, 287–304. [Google Scholar]
- Xinyu, Z.; Chengbo, W.; Yuanchang, L.; Xiang, C. Decision-Making for the Autonomous Navigation of Maritime Autonomous Surface Ships Based on Scene Division and Deep Reinforcement Learning. Sensors 2019, 19, 4055. [Google Scholar]
- Lee, J.S.; Son, W.J.; Lee, B.K.; Cho, I.S. Optimal site selection of floating offshore wind farm using genetic algorithm. J. Korean Soc. Mar. Environ. Saf. 2019, 25, 658–665. [Google Scholar] [CrossRef]
- MPA (Maritime and Port Authority of Singapore). Safety of Navigation in the Singapore Strait; MPA: Singapore, 2006. [Google Scholar]
- Tixrant, M.L.; Guyader, D.L.; Gourmelon, F.; Queffelec, B. How can Automatic Identification System (AIS) data be used for maritime spatial planning. Ocean Coastal Manag. 2018, 166, 18–29. [Google Scholar] [CrossRef] [Green Version]
- Giuliana, P.; Michele, V.; Karna, B. Vessel Pattern Knowledge Discovery from AIS data: A framework for anomaly detection and route prediction. Entropy 2013, 15, 2218–2245. [Google Scholar]
- Lee, B.K.; Cho, I.S.; Kim, D.H. A study on the design of the grid-cell assessment system for the optimal location of offshore wind farms. J. Korean Soc. Mar. Environ. Saf. 2018, 24, 848–857. [Google Scholar] [CrossRef]
- National Law Information Center. Maritime Safety Act; Republic of Korea. Available online: http://www.law.go.kr/ (accessed on 27 March 2020).
- Lee, M.K.; Park, Y.S. Collision prevention algorithm for fishing vessels using mmWAVE communication. J. Mar. Sci. Eng. 2020, 8, 115. [Google Scholar] [CrossRef] [Green Version]
- Lee, J.S.; Son, W.J.; Lee, H.T.; Cho, I.S. A Study on the Factors Affecting Optimal Site of Offshore Wind Farm from the Perspective of Maritime Traffic using Spatial Analysis. J. Korean Coastal Disaster Prev. 2020, 7, 85–96. [Google Scholar] [CrossRef]
- Botev, Z.I.; Grotowski, J.F.; Kroese, D.P. Kernel density estimation via diffusion. Ann. Stat. 2010, 38, 2916–2917. [Google Scholar] [CrossRef] [Green Version]
- Cho, H.J. Initialization Method of Model-Based Clustering Using Kernel Density Estimation: Using Big Data of Corporate Default. Master’s Thesis, Kookmin University, Seoul, Korea, 2017. [Google Scholar]
- Alexander, B.; Carl, J.; Ylva, R. Modeling Bivariate Distributions Using Kernel Density Estimation. In Project in Computational Science; Uppsala University: Uppsala, Sweden, 2016; pp. 1–48. [Google Scholar]
- Esri. How Kernel Density Works. Available online: https://pro.arcgis.com/en/pro-app/tool-reference/spatial-analyst/how-kernel-density-works.htm (accessed on 27 March 2020).
- Silverman, B.W. Density Estimation for Statistics and Data Analysis. In Monographs on Statistics and Applied Probability; Chapman and Hall: London, UK, 1986; pp. 120–158. [Google Scholar]
- Nicolas, L.; Xavier, W. Fast and stable multivariate kernel density estimation by fast sum updating. J. Comput. Graph. Stat. 2019, 28, 596–608. [Google Scholar]
- Pramod, K.S.; Navin, R.; Rajesh, M. A comparison of road network extraction from High Resolution Images. In Proceedings of the First International Conference on Secure Cyber Computing and Communication, Jalandhar, India, 15–17 December 2018; pp. 525–531. [Google Scholar]
- Kim, J.H.; Kim, G.B. A Binarization Technique using Histogram Matching for License Plate with a Shadow. J. Broadcast Eng. 2014, 19, 56–63. [Google Scholar] [CrossRef] [Green Version]
- Otsu, N. A Threshold Selection Method from Gray-Level Histograms. IEEE. Trans. Sys. Man. Cybern. 1979, 9, 62–66. [Google Scholar] [CrossRef] [Green Version]
- Canny, J. A Computational Approach to Edge Detection. IEEE Trans. Pattern Anal. Mach. Intell. 1987, 8, 184–203. [Google Scholar]
- Park, C.S.; Kwon, Y.S. Urban Traffic Engineering; Book publishing kkubeog: Seoul, Korea; pp. 330–346.
- UN (United Nations). United Nations Convention on the Law of the Sea; UNCLOS: New York, NY, USA, 1982; p. 45. [Google Scholar]
- MCA (Maritime and Coastguard Agency). MGN 543(M+F) Safety of Navigation: Offshore Renewable Energy Installations (ORELs), Guidance on UK Navigation Practice, Safety and Emergency Response; MCA: Southampton, UK, 2016; p. 18. [Google Scholar]
- Marine Spatial Plan for the Belgian part of the North Sea; Brussels, Belgium, 2016; pp. 42–43.
- Lee, D.T.; Schachter, B.J. Two algorithms for constructing a Delaunay triangulation. Int. J. Comput. Inf. Sci. 1980, 9, 219–242. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Categorization | AIS |
|---|---|
| Period | 2019.03.01.–2020.02.29. (one year) |
| Analysis Area | Incheon, Republic of Korea |
| Ship Type | Passenger Ship (60–64, 69) Cargo Ship (70–74, 79) Tanker (80–84, 89) |
| Class 1 | Under 200 m of Ship’s Type ( |
| Class 2 | 200 m or Over of Ship’s Type () |
| Transmission Distance | 50 Nautical Miles |
| Transmission Interval | 2 s to 3 min |
| Categorization | KDE | Density |
|---|---|---|
| Data Format | ||
| Grid Cell | 100 m | 100 m |
| Search Radius | 500 m | 500 m |
| Out Cell Values | Densities | Densities |
| Method | Planar | Planar |
| Represent | 90% of Total Traffic | 90% of Total Traffic |
| No. | Percentage | Color | KDE | Density |
|---|---|---|---|---|
| 1 | 0%–10% | None | 1234051.0 | 3137150.2 |
| 2 | 10%–20% | 2468102.5 | 6274300.5 | |
| 3 | 20%–30% | 4936205.0 | 9411450.7 | |
| 4 | 30%–40% | 7404307.5 | 15685751.2 | |
| 5 | 40%–50% | 11106461.3 | 21960051.7 | |
| 6 | 50%–60% | 16042666.4 | 31371502.4 | |
| 7 | 60%–70% | 23446973.9 | 43920103.4 | |
| 8 | 70%–80% | 33319384.0 | 56468704.3 | |
| 9 | 80%–90% | 45659896.7 | 72154455.6 | |
| 10 | 90%–100% | 314683072.0 | 799973312.0 |
| No. | Percentage | Color | KDE | Density |
|---|---|---|---|---|
| 1 | 0%–10% | None | 164983.1 | 301385.6 |
| 2 | 10%–20% | 494949.3 | 904156.9 | |
| 3 | 20%–30% | 1154881.7 | 1808313.8 | |
| 4 | 30%–40% | 2144780.3 | 3013856.3 | |
| 5 | 40%–50% | 3646645.2 | 4520784.4 | |
| 6 | 50%–60% | 4949493.1 | 6329098.2 | |
| 7 | 60%–70% | 6269358.0 | 8137412.0 | |
| 8 | 70%–80% | 7754205.9 | 10247111.4 | |
| 9 | 80%–90% | 9239053.9 | 12658196.5 | |
| 10 | 90%–100% | 42070692.0 | 76853336.0 |
| Area | Category | Centerline of Original Route | Centerline of Class 1 | Centerline of Class 2 |
|---|---|---|---|---|
| Seo sudo | 32.42 km | |||
| 34.84 km | 35.09 km | 34.71 km | ||
| Difference | +2.42 km | +2.67 km | +2.29 km | |
| 1.074 | 1.082 | 1.070 | ||
| - | +0.8 | −0.4 | ||
| Dong sudo | 25.94 km | |||
| 27.00 km | 27.58 km | 26.36 km | ||
| Difference | +1.06 km | +1.64 km | +0.42 km | |
| 1.041 | 1.063 | 1.016 | ||
| - | +2.2 | −2.5 | ||
| Fairway 1 | 18.12 km | |||
| 18.38 km | 20.08 km | 19.33 km | ||
| Difference | +0.26 km | +1.96 km | +1.21 km | |
| 1.014 | 1.108 | 1.066 | ||
| - | +9.4 | +5.2 | ||
| Area | Intersection Angle of Original Route | Class 1 | Class 2 | ||
|---|---|---|---|---|---|
| Angle | Angle | ||||
| Point 1 | 25° | 16.3° | 8.7° (34.8%) | 11.3° | 13.7° (54.8%) |
| Point 2 | 20° | 21.8° | −1.8° (−9.0%) | 7.6° | 12.4° (62.0%) |
| Point 3 | 37° | 19.7° | 17.3° (46.7%) | 15.2° | 21.8° (58.9%) |
| Point 4 | 35° | 10.8° | 24.2° (69.1%) | 13.7° | 21.3° (60.8%) |
| Point 5 | IN 48° | 17.2° | 30.8° (64.2%) | 16.0° | 32.0° (66.6%) |
| OUT 53° | 23.9° | 29.1° (54.9%) | 20.6° | 32.4° (61.1%) | |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, J.-S.; Son, W.-J.; Lee, H.-T.; Cho, I.-S. Verification of Novel Maritime Route Extraction Using Kernel Density Estimation Analysis with Automatic Identification System Data. J. Mar. Sci. Eng. 2020, 8, 375. https://doi.org/10.3390/jmse8050375
Lee J-S, Son W-J, Lee H-T, Cho I-S. Verification of Novel Maritime Route Extraction Using Kernel Density Estimation Analysis with Automatic Identification System Data. Journal of Marine Science and Engineering. 2020; 8(5):375. https://doi.org/10.3390/jmse8050375
Chicago/Turabian StyleLee, Jeong-Seok, Woo-Ju Son, Hyeong-Tak Lee, and Ik-Soon Cho. 2020. "Verification of Novel Maritime Route Extraction Using Kernel Density Estimation Analysis with Automatic Identification System Data" Journal of Marine Science and Engineering 8, no. 5: 375. https://doi.org/10.3390/jmse8050375