
Abstract
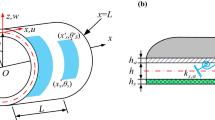
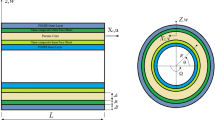
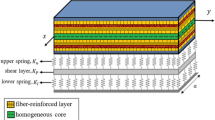
In this paper, for the first time active vibration control of rotating laminated composite truncated conical shells containing magnetostrictive layers by employing first-order shear deformation theory is investigated. The active vibration control task is done through magnetostrictive layers employing velocity feedback control law. The effects of initial hoop tension and centrifugal and Coriolis forces are considered in extraction of the partial differential equations through Hamilton principle. The ordinary differential equations are derived by employing modified Galerkin method. This study agrees with the mentioned results of the literature. Finally, the effects of several parameters on the vibration suppression are investigated.











Similar content being viewed by others
References
Chopra I, Sirohi J (2013) Smart structures theory, vol 35. Cambridge University Press, Cambridge
Goodfriend MJ, Shoop KM (1992) Adaptive characteristics of the magnetostrictive alloy, Terfenol-D, for active vibration control. J Intell Mater Syst Struct 3(2):245–254
Olabi AG, Grunwald A (2008) Design and application of magnetostrictive materials. Mater Des 29(2):469–483
Li H, Chen ZB, Tzou HS (2010) Distributed actuation characteristics of clamped-free conical shells using diagonal piezoelectric actuators. Smart Mater Struct 19(11):115015
Li H, Chen ZB, Hu SD, Tzou HS (2011) Optimal control of clamped-free conical shell using diagonal piezoelectric sensor and actuator. ASME Int Mech Eng Cong Expos. https://doi.org/10.1115/IMECE2011-63028
Shah PH, Ray MC (2012) Active control of laminated composite truncated conical shells using vertically and obliquely reinforced 1–3 piezoelectric composites. Eur J Mech A Solids 32:1–12
Li FM, Song ZG, Chen ZB (2012) Active vibration control of conical shells using piezoelectric materials. J Vib Control 18(14):2234–2256
Li H, Hu SD, Tzou HS, Chen ZB (2012) Optimal vibration control of conical shells with collocated helical sensor/actuator pairs. J Theor Appl Mech 50(3):769–784
Kumar A, Ray MC (2014) Control of smart rotating laminated composite truncated conical shell using ACLD treatment. Int J Mech Sci 89:123–141
Fan J, Huang J, Ding J, Zhang J (2017) Free vibration of functionally graded carbon nanotube-reinforced conical panels integrated with piezoelectric layers subjected to elastically restrained boundary conditions. Adv Mech Eng 9(7):1687814017711811
Sun L, Li W, Wu Y, Lan Q (2017) Active vibration control of a conical shell using piezoelectric ceramics. J Low Freq Noise Vib Act Control 36(4):366–375
Hajmohammad MH, Farrokhian A, Kolahchi R (2018) Smart control and vibration of viscoelastic actuator-multiphase nanocomposite conical shells-sensor considering hygrothermal load based on layerwise theory. Aerosp Sci Technol 78:260–270
Chan DQ, Quan TQ, Kim SE, Duc ND (2019) Nonlinear dynamic response and vibration of shear deformable piezoelectric functionally graded truncated conical panel in thermal environments. Eur J Mech A Solids 77:103795
Mohammadrezazadeh S, Jafari AA (2019) Vibration suppression of truncated conical shells embedded with magnetostrictive layers based on first order shear deformation theory. J Theor Appl Mech 57(4):957–972. https://doi.org/10.15632/jtam-pl/112419
Moghaddam SMF, Ahmadi H (2020) Active vibration control of truncated conical shell under harmonic excitation using piezoelectric actuator. Thin Walled Struct 151:106642
Lam KY, Hua L (1997) Vibration analysis of a rotating truncated circular conical shell. Int J Solids Struct 34(17):2183–2197
Hua L (2000) Frequency characteristics of a rotating truncated circular layered conical shell. Compos Struct 50(1):59–68
Ng TY, Li H, Lam KY (2003) Generalized differential quadrature for free vibration of rotating composite laminated conical shell with various boundary conditions. Int J Mech Sci 45(3):567–587
Civalek Ö (2006) An efficient method for free vibration analysis of rotating truncated conical shells. Int J Press Vessels Pip 83(1):1–12
Talebitooti M, Ghayour M, Ziaei-Rad S, Talebitooti R (2010) Free vibrations of rotating composite conical shells with stringer and ring stiffeners. Arch Appl Mech 80(3):201–215
Malekzadeh P, Heydarpour Y (2013) Free vibration analysis of rotating functionally graded truncated conical shells. Compos Struct 97:176–188
Heydarpour Y, Aghdam MM, Malekzadeh P (2014) Free vibration analysis of rotating functionally graded carbon nanotube-reinforced composite truncated conical shells. Compos Struct 117:187–200
Nejati M, Asanjarani A, Dimitri R, Tornabene F (2017) Static and free vibration analysis of functionally graded conical shells reinforced by carbon nanotubes. Int J Mech Sci 130:383–398
Civalek Ö (2017) Discrete singular convolution method for the free vibration analysis of rotating shells with different material properties. Compos Struct 160:267–279
Sarkheil S, Foumani MS (2017) An improvement to motion equations of rotating truncated conical shells. Eur J Mech A Solids 62:110–120
Dai Q, Cao Q, Chen Y (2018) Frequency analysis of rotating truncated conical shells using the Haar wavelet method. Appl Math Model. https://doi.org/10.1016/j.apm.2017.06.025
Shekari A, Ghasemi FA, Malekzadehfard K (2017) Free damped vibration of rotating truncated conical sandwich shells using an improved high-order theory. Latin Am J Solids Struct 14(12):2291–2323
Talebitooti M (2018) Thermal effect on free vibration of ring-stiffened rotating functionally graded conical shell with clamped ends. Mech Adv Mater Struct 25(2):155–165
Dung DV, Anh LTN, Hoa LK (2018) Analytical investigation on the free vibration behavior of rotating FGM truncated conical shells reinforced by orthogonal eccentric stiffeners. Mech Adv Mater Struct 25(1):32–46
Shakouri M (2019) Free vibration analysis of functionally graded rotating conical shells in thermal environment. Compos B Eng 163:574–584
Singha TD, Rout M, Bandyopadhyay T, Karmakar A (2020) Free vibration analysis of rotating pretwisted composite sandwich conical shells with multiple debonding in hygrothermal environment. Eng Struct 204:110058
Rao SS (2007) Vibration of continuous systems. Wiley, New York
Pradhan SC, Reddy JN (2004) Vibration control of composite shells using embedded actuating layers. Smart Mater Struct 13(5):1245
Reddy JN (2003) Mechanics of laminated composite plates and shells: theory and analysis, 2nd edn. CRC Press, Boca Raton
Lee SJ, Reddy JN (2004) Vibration suppression of laminated shell structures investigated using higher order shear deformation theory. Smart Mater Struct 13(5):1176
Talebitooti M (2013) Three-dimensional free vibration analysis of rotating laminated conical shells: layerwise differential quadrature (LW-DQ) method. Arch Appl Mech 83(5):765–781
Li H, Lam KY, Ng TY (2005) Rotating shell dynamics. Elsevier, Amsterdam
Qatu MS (2004) Vibration of laminated shells and plates. Elsevier, Amsterdam
Sun S, Liu L, Cao D (2018) Nonlinear travelling wave vibrations of a rotating thin cylindrical shell. J Sound Vib 431:122–136
Irie T, Yamada G, Tanaka K (1984) Natural frequencies of truncated conical shells. J Sound Vib 92(3):447–453
Li FM, Kishimoto K, Huang WH (2009) The calculations of natural frequencies and forced vibration responses of conical shell using the Rayleigh-Ritz method. Mech Res Commun 36(5):595–602
Lam KY, Hua L (1999) Influence of boundary conditions on the frequency characteristics of a rotating truncated circular conical shell. J Sound Vib 223(2):171–195
Author information
Authors and Affiliations
Corresponding author
Additional information
Technical Editor: Wallace Moreira Bessa, D.Sc..
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix
Appendix
The differential operators of matrix L which is introduced in Eq. (29) are defined as the following for symmetric cross-ply lamination scheme:
The elements of matrix P which is presented in Eq. (32) can be obtained in the following types for cross-ply symmetric laminate scheme:
Rights and permissions
About this article

Cite this article
Mohammadrezazadeh, S., Jafari, A.A. Active vibration control of rotating laminated composite truncated conical shells through magnetostrictive layers based on first-order shear deformation theory. J Braz. Soc. Mech. Sci. Eng. 42, 304 (2020). https://doi.org/10.1007/s40430-020-02363-w
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s40430-020-02363-w