Abstract
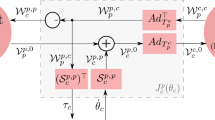
In this work the dynamic model and the nonlinear control for a multi-copter have been developed using the geometric algebra framework specifically using the motor algebra \(G^+_{3,0,1}\). The kinematics for the aircraft model and the dynamics based on Newton-Euler formalism are presented. Block-control technique is applied to the multi-copter model which involves super twisting control and an estimator of the internal dynamics for maneuvers away from the origin. The stability of the presented control scheme is proved. The experimental analysis shows that our non-linear controller law is able to reject external disturbances and to deal with parametric variations.








Similar content being viewed by others


References
Bouabdallah, S., Siegwart, R.: Full control of a quadrotor. In: IEEE/RSJ international conference on intelligent robots and systems (IROS), San Diego, CA, USA (2007)
Wang, X., Yu, C.: Feedback linearization regulator with coupled attitude and translation dynamics based on unit dual quaternion. In: 2010 IEEE international symposium on intelligent control, pp. 2380–2384 (2010)
Abaunza, H., Cariño, J., Castillo, P., Lozano, R.: Quadrotor dual quaternion control. In: 2015 workshop on research, education and development of unmanned aerial systems (RED-UAS), pp. 195–203 (2015)
Luque-Vega, L., Castillo-Toledo, B., Loukianov, A.G.: Robust block second order sliding mode control for a quadrotor, advances in guidance and control of aerospace vehicles using sliding mode control and observation techniques. J. Franklin Inst. 349, 719–739 (2012)
Arellano-Muro, C. A., Castillo-Toledo, B., Loukianov, A., Luque-Vega, L. F., Gonzalez-Jimenez, L.: Quaternion-based trajectory tracking robust control for a quadrotor. In: 10th annual system of systems engineering conference 2015 (SoSE 2015), San Antonio, USA (2015)
Loukianov, A.G.: Robust block decomposition sliding mode control design. Int J Math Probl Eng Theory Methods Appl 8, 349–365 (2002)
Levant, A.: Universal single-input-single-output (SISO) sliding-mode controllers with finite time convergence. IEEE Trans Automat Control 46, 1785–1789 (2005)
Bayro-Corrochano, E.: Geometric Computing For Wavlet Transform, Robot Vision, Learning, Control and Action. Springer, London (2010)
C. W. K.: Preliminary sketch of bi-quaternons. Proc. London Math. Soc., 4, 381–395 (1873)
Gessow, A., Myers, G. C.: Aerodynamics of the helicopter. In: Fifth printing, Frederick Unger Publishing Co., New York (1978)
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
This article is part of the Topical Collection on Proceedings ICCA 11, Ghent, 2017, edited by Hennie De Schepper, Fred Brackx, Joris van der Jeugt, Frank Sommen, and Hendrik De Bie.
Rights and permissions
About this article

Cite this article
Arellano-Muro, C.A., Osuna-González, G., Castillo-Toledo, B. et al. Newton–Euler Modeling and Control of a Multi-copter Using Motor Algebra \(\mathbf{G}^+_{3,0,1}\). Adv. Appl. Clifford Algebras 30, 19 (2020). https://doi.org/10.1007/s00006-020-1045-1
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00006-020-1045-1