
Abstract
If a Hilbert geometry of twice differentiable boundary has two quadratic infinitesimal spheres, then the Hilbert geometry is a Cayley–Klein model of the hyperbolic geometry.
Similar content being viewed by others

1 Introduction
Let \(\overline{CD}\) denote the open segment of the points \(C,D\in \mathbb {R}^n\) (\(n=1,2,\ldots \)), and if it is on the straight line AB of points \(A,B\in \mathbb {R}^n\), then let (A, B; C, D) denote the cross-ratio of these points. If \(\mathcal {M}\) is an open, strictly convex, and bounded subset of \(\mathbb {R}^n\) (\(n=2,3,\ldots \)), then the function \(d:\mathcal {M}\times \mathcal {M}\rightarrow \mathbb {R}\) defined by
is a metric on \(\mathcal {M}\) [4, p. 297] which satisfies the strict triangle inequality, i.e., \(d(A,B)+d(B,C)=d(A,C)\) if and only if \(B\in \overline{AC}\cup \{A,C\}\). This function d is called the Hilbert metric on\(\mathcal {M}\), and \(\mathcal {M}\) is its domain. Such pairs \((\mathcal {M},d)\) are called Hilbert geometries.
Hilbert geometries are Finslerian manifolds [4, (29.6)]. We call a point P of a Hilbert geometry \((\mathcal {M},d)\)Riemannian if the Finsler norm on \(T_P\mathcal {M}\) is quadratic. By Beltrami’s theorem [1, 2] (see also [4, (29.3)]), a Hilbert geometry is Riemannian if and only if it is a Cayley–Klein model of the hyperbolic geometry.
In this paper, we prove in Theorem 4.4 that
a Hilbert geometry in the plane has two Riemannian points if and only if it is a Cayley–Klein model of the hyperbolic geometry.
For the proof, we need the assumption that the boundary is twice differentiable at the points, where the line joining the two Riemannian points intersects the boundary. Theorem 5.2 shows that this assumption is also necessary.
Theorem 4.4 is also formulated in the language of geometric tomography [7] by Theorem 5.3:
the twice differentiable boundary of a strictly convex bounded domain in the plane is an ellipse if and only if its\((-1)\)-chord functions are quadratic at two inner points.
2 Notations and preliminaries
Points of \(\mathbb {R}^n\) are denoted by capital letters \(A,B,\ldots \), vectors are \(\overrightarrow{AB}\) or \({\varvec{a}} , {\varvec{b}} , \ldots \), but we use these latter notations also for points if the origin is fixed. We denote the interior of the convex hull of a point set \(\mathcal {P}\) by \(\overline{\mathcal {P}}\).
For \(C\in AB\), the affine ratio (A, B; C) is defined by \((A,B;C)\overrightarrow{BC}=\overrightarrow{AC}\), and it satisfies \((A,B;C,D)=(A,B;C)/(A,B;D)\) [4, p. 243].
If a Euclidean metric \(d_e\) is given, then the length of a segment \(\overline{AB}\), or of a vector \(\overrightarrow{AB}={\varvec{x}}\) is denoted by \(|AB|=|{\varvec{x}}|=d_e(A,B)\).
We use the usual big-O and little-o notation. To indicate derivatives of a function or a map, we use prime, dot or \(\mathsf D\) appropriately.
If the domain \(\mathcal {M}\) of the Hilbert geometry \((\mathcal {M},d)\) is in \(\mathbb {R}^n\), then we identify the tangent spaces \(T_P\mathcal {M}\) with \(\mathbb {R}^n\) by the map \(\imath _P:{\varvec{v}}\mapsto P+{\varvec{v}}\). This way, the Finsler function \(F_{\mathcal {M}}:\mathcal {M}\times \mathbb {R}^n\rightarrow \mathbb {R}\) associated with the Hilbert metric d can be given at a point \(P\in \mathcal {M}\) by
where \({\varvec{v}}\in T_P\mathcal {M}\), and \(\lambda _{{\varvec{v}}}^\pm \in (0,\infty ]\) is such that \(P_{{\varvec{v}}}^\pm :=P\pm \lambda _{{\varvec{v}}}^\pm {\varvec{v}}\in \partial \mathcal {M}\) [4, (50.4)].Footnote 1 Equation (2.1) implies that \(\imath _P\) maps the indicatrix of norm \(F_{\mathcal {M}}(P,\cdot )\) into the strictly convex set \(\mathcal {B}^{\mathcal {M}}_P\subset \mathbb {R}^n\), the infinitesimal ball, with boundary
the infinitesimal sphere. Observe here that

So, infinitesimal spheres are called infinitesimal circles and denoted by \(\mathcal {C}^{\mathcal {M}}_P\).
If a Euclidean metric is provided, then we frequently use the notation \({\varvec{u}}_\varphi =(\cos \varphi ,\sin \varphi )\). Further, if a bounded open domain \(\mathcal {D}\subset \mathbb {R}^2\) is starlike with respect to a point \(P\in \mathcal {D}\), then we usually polar parameterize the boundary\(\partial \mathcal {D}\) with a function \({\varvec{r}}:[-\pi ,\pi )\rightarrow \mathbb {R}^2\) defined by \( {\varvec{r}}(\varphi )= r(\varphi ){\varvec{u}}_\varphi \in \partial \mathcal {D}, \) where \(r>0\) is the radial function of \(\mathcal {D}\) with respect to the base point P. For any ellipse \(\mathcal {E}\) with center P there exists unique \(\omega \in (-\pi /2,\pi /2]\) and \(a\ge b>0\) such that
is the polar equation with respect to origin P.
We also use the notation \(\ell _{{\varvec{d}}}:=\{\lambda {\varvec{d}}:\lambda \in \mathbb {R}\}\) for the line through the origin with nonvanishing directional vector \({\varvec{d}}\), and \(\ell _\xi =\ell _{{\varvec{u}}_\xi }\) as a short hand in the plane.
The following result is a rephrase of [5, Stable Manifold Theorem, p. 114]. See also [6, Theorem 4.1]!
Theorem 2.1
Let \(\mathcal {N}_0\subset \mathbb {R}^2\) be a neighborhood of the origin \({\varvec{0}}\), and let the mapping \(\Phi :\mathcal {N}_0\rightarrow \mathbb {R}^2\) be of class \(C^l\)\((l\in [1,\infty ])\).
If there are linearly independent vectors \({\varvec{u}}\) and \({\varvec{v}}\) such that \(\Phi ({\varvec{w}})={\varvec{w}}\) for every \({\varvec{w}}\in \ell _{{\varvec{u}}}\cap \mathcal {N}_0\), and  for some \(k\in (0,1)\), then in some neighborhood \(\mathcal {N}\subseteq \mathcal {N}_0\) of \({\varvec{0}}\) the set \(\{{\varvec{w}}\in \mathcal {N}:\Phi ^{(r)}({\varvec{w}})\rightarrow {\varvec{0}}\text { as }r\rightarrow \infty \}\) is the graph of a \(C^l\) function from \(\ell _{{\varvec{v}}}\cap \mathcal {N}\) to \(\ell _{{\varvec{u}}}\cap \mathcal {N}\).
for some \(k\in (0,1)\), then in some neighborhood \(\mathcal {N}\subseteq \mathcal {N}_0\) of \({\varvec{0}}\) the set \(\{{\varvec{w}}\in \mathcal {N}:\Phi ^{(r)}({\varvec{w}})\rightarrow {\varvec{0}}\text { as }r\rightarrow \infty \}\) is the graph of a \(C^l\) function from \(\ell _{{\varvec{v}}}\cap \mathcal {N}\) to \(\ell _{{\varvec{u}}}\cap \mathcal {N}\).
Notice that \(\Phi ^{(r)}\) refers to the r-th iterate, rather than, e.g., the r-th derivative.
Finally, we need the following easy consequence of [4, (28.11)]:

3 Utilities
Although it is known that the hyperbolic geometry is a Riemannian manifold, so its infinitesimal spheres are quadratic, the following result gives some more details.
Lemma 3.1
Let \(\mathcal {E}_e\) be the ellipse \(x^2+\frac{y^2}{e^2}=1\), and let \(P=(p,0)\), where \(p\in (-1,1)\). Then \(\mathcal {C}^{\overline{\mathcal {E}}_e}_P\) is the ellipse \(\frac{(x-p)^2}{a^2}+\frac{y^2}{b^2}=1\), where \(a=1-p^2\) and \(b=e\sqrt{1-p^2}\).
Proof
According to (2.2), we can assume that \(e=1\) without loss of generality.
Let line \(P+\ell _\xi \) intersect \(\mathcal {E}_e\) in the points \(P\pm \lambda _\pm {\varvec{u}}_\xi \). Then \(1=\lambda _\pm ^2+p^2\mp 2p\lambda _\pm \cos \xi \), hence \( \lambda _\pm =\pm p\cos \xi +\sqrt{1-p^2\sin ^2\xi } \). Thus (2.1) gives
\(\square \)
Notice that \(\mathcal {C}^{\bar{\mathcal {E}}_e}_P\) is a circle if and only if \(1-p^2=e\sqrt{1-p^2}\), i.e., \(p=\pm \sqrt{1-e^2}\) which can only happen if \(e<1\). In this case, P is a focus of \(\mathcal {E}_e\).
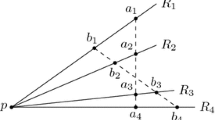
From now on, we always use the following general configuration: P is a point of a 2-dimensional Hilbert geometry \((\mathcal {M},d)\); \(\ell \) is a straight line through P; I and J are the points where \(\ell \) intersects \(\partial \mathcal {M}\); a coordinate system is chosenFootnote 2 such that \(I=(-1,0)\), \(J=(1,0)\), and \(P=(p,0)\), where \(-1<p<1\); X and Y are the points where \(P+\ell _\xi \) intersects \(\partial \mathcal {M}\). Figure 1 shows qualitative depictions of what we have in general.

Qualitative depiction of infinitesimal circles in Hilbert planes
Observe that for \(X\in \partial \mathcal {M}\) we have \(2F_{\mathcal {M}}(P,X-P)-1=1/\lambda _{X-P}^->0\) by (2.1), so, as a continuous function takes its minimal value, there is a suitably small \(\varepsilon >0\) such that the map
is well defined on the Minkowski sum \(\mathcal {M}^\varepsilon :=\partial \mathcal {M}+\varepsilon \mathcal {B}^2\), where \(\mathcal {B}^2\) is the unit ball at (0, 0).
Choose the Euclidean metric \(d_e\) such that \(\{(1,0),(0,1)\}\) is an orthonormal basis, and polar parameterize \(\mathcal {C}^{\mathcal {M}}_P\) with respect to P by \({\varvec{r}}:[-\pi ,\pi )\ni \xi \mapsto r(\xi ){\varvec{u}}_\xi \in \mathbb {R}^2\). Then (2.1) gives
Thus r is twice differentiable if \(\partial \mathcal {M}\) is twice differentiable, and
Lemma 3.2
Let \(X\in I+\varepsilon \mathcal {B}^2\), and set \(Y=\Phi _P(X)\). Let \((x,y)=X-I\) and \((u,v)=J-Y\).
Then
and
Proof
Let \({\varvec{u}}_\xi =(X-P)/|X-P|\). Then we clearly have \(\frac{y}{1+p-x}=-\tan \xi =\frac{v}{1-p-u}\), so the expansions of \(\frac{1}{1-p-u}\) and \(\frac{1}{1+p-x}\) give (3.4).
To prove (3.5), we are estimating \(-u\) for the second order of x and y. We start with (3.2) and use (3.3) as
shows. Next we estimate |XP| by the binomial series so that
Substitution of this into the previous formula and some rearrangements result in
To estimate this, we need to consider \(r(\xi )-r(0)\) and \({1}/({2|XP|-r(\xi )})\). We use the binomial series and (3.6) to get
This, as \(\sin \xi =-y/|XP|\), leads to
Substitution of this into the Taylor expansion of r gives
Again the binomial series, and then (3.3), (3.6), and (3.9) result in
Putting estimates (3.9), (3.10), and (3.8) into (3.7) and confining ourselves to summands of degree less than three, we obtain
where the summands that are estimated by \(O(x^3)+O(x^2y)+o(y^2)\) was left out. Collecting the terms by their powers gives
This implies (3.5) after reordering the summands. \(\square \)
4 Hilbert geometries with two Riemannian points
In what follows, we always assume that P and Q are Riemannian points of the Hilbert plane \((\mathcal {M},d)\), \(\ell =PQ\) is the x-axis of the chosen coordinate system, I and J are the intersection points of \(\ell \) and \(\partial \mathcal {M}\), \(I=(-1,0)\), \(J=(1,0)\), \(P=(p,0)\) and \(Q=(q,0)\), where \(-1<q<p<1\). Further, \(\mathfrak {t}_I\) and \(\mathfrak {t}_J\) are the respective tangents of \(\mathcal {M}\) at I and J, and the tangents of \(\mathcal {C}^{\mathcal {M}}_Q\) and \(\mathcal {C}^{\mathcal {M}}_P\) at their respective intersections with \(\ell \) are \(\mathfrak {t}_I^Q\), \(\mathfrak {t}_J^Q\) and \(\mathfrak {t}_I^P\), \(\mathfrak {t}_J^P\), respectively.
Notice that the infinitesimal circle \(\mathcal {C}^{\mathcal {M}}_P\) is now an ellipse, so it is of form (2.3) in any Euclidean metric. Observe that differentiation of (2.3) yields
Further, using
we obtain
Lemma 4.1
If \(\partial \mathcal {M}\) is twice differentiable at I and J, then there is a unique ellipse \(\mathcal {E}\) touching \(\mathcal {M}\) at I, J such that \(\mathcal {C}^{\overline{\mathcal {E}}}_Q \equiv C_Q^{\mathcal {M}}\) and \(\mathcal {C}^{\overline{\mathcal {E}}}_P \equiv \mathcal {C}^{\mathcal {M}}_P\).
Proof
If \(\mathfrak {t}_I^Q\) intersects \(\mathfrak {t}_J^P\), then \(\mathfrak {t}_I^{}\) also intersects \(\mathfrak {t}_J^{}\) in a point, say L, by (2.4). Choose a straight line l through L that avoids \(\mathcal {M}\), and let \(\varpi \) be a perspectivity that takes l into the ideal line of \(\mathbb {R}^2\). Then, by (2.2), \(\dot{\varpi }(\mathcal {C}^{\mathcal {M}}_{Q})\equiv \mathcal {C}^{\varpi (\mathcal {M})}_{\varpi (Q)}\), and \(\dot{\varpi }(\mathcal {C}^{\mathcal {M}}_{P})\equiv \mathcal {C}^{\varpi (\mathcal {M})}_{\varpi (P)}\), hold, where the derivative \(\dot{\varpi }\) of \(\varpi \) is an affine transform. As affinities keep quadraticity, \(\varpi (Q)\) and \(\varpi (P)\) are Riemannian points in the Hilbert geometry \((\varpi (\mathcal {M}),d_{\varpi (\mathcal {M})})\), so we can assume without loss of generality that \(\mathfrak {t}_I^Q\parallel \mathfrak {t}_J^P\).
Fix the Euclidean metric d in which \(\mathcal {C}^{\mathcal {M}}_Q\) is a circle and \(d(I,J)=2\). Since \(\mathcal {C}^{\mathcal {M}}_Q\) is a circle, \(\mathfrak {t}_I^Q\) and \(\mathfrak {t}_J^P\), and, by (2.4), also \(\mathfrak {t}_I\) and \(\mathfrak {t}_J\) are perpendicular to line QP. Figure 2 shows what we have.

Riemannian points Q, P in a Hilbert plane \(\mathcal {M}\)
Thus we have \(r'(0)=0\) and also \(r''(0)=r^3(0)\big (\frac{1}{r^2(0)}-\frac{1}{r^2(\pi /2)}\big )\) by (4.1). So equation (3.5) reduces to
Assume from now on that \(X\in \partial \mathcal {M}\), hence also \(Y=\Phi _P(X)\in \partial \mathcal {M}\).
Since \(\mathfrak {t}_I\) and \(\mathfrak {t}_J\) are perpendicular to line QP, basic differential geometry gives that the respective curvatures of \(\partial \mathcal {M}\) at I and J are
So, dividing (4.2) by the square of (3.4) leads to
Repeating the same procedure for the circle \(\mathcal {C}^{\mathcal {M}}_Q\) gives \(\kappa _J=-\kappa _I+\frac{2}{1-q^2}\). This and (4.4) imply
hence Lemma 3.1 proves the statement with the ellipse \(x^2+\frac{y^2}{1-q^2}=1\). \(\square \)
Lemma 4.2
If \(\partial \mathcal {M}\) is twice differentiable at I and J, then \(\mathcal {E}\) coincides \(\partial \mathcal {M}\) in a neighborhood of I, J, respectively.
Proof
According to the last formula in the proof of Lemma 4.1, the infinitesimal circles \(\mathcal {C}^{\overline{\mathcal {E}}}_P \equiv \mathcal {C}^{\mathcal {M}}_P\) and \(\mathcal {C}^{\overline{\mathcal {E}}}_Q \equiv C_Q^{\mathcal {M}}\) can be represented by polar equations of form
respectively. Then (3.1) gives
hence \(\Phi _P\) is a real analytic map on \(\mathcal {M}^\varepsilon \). It follows in the same way that \(\Phi _Q\) is a real analytic map on \(\mathcal {M}^\varepsilon \). We conclude that \(\Phi :=\Phi _Q\circ \Phi _P\) is also a real analytic map on \(\mathcal {M}^\varepsilon \).

Observe that all three convergences \((s,t)\rightarrow (0,0)\), \((u,v)\rightarrow (0,0)\), and \((x,y)\rightarrow (0,0)\) are equivalent.
Then (3.5) gives
Further, (3.4) gives
This immediately implies
where \(k=\frac{1-p}{1+p}\frac{1+q}{1-q}<1\).
Now we are calculating \(\Phi \). Lemma 4.1 gives \(r_p'(0)=0\), and also \(r_q'(0)=r_q''(0)=0\) holds. Equations (4.1), (3.3), and (4.5) give
Thus (4.7) gives
This mutates at \((x,y)=(zy^2,y)\) to
where \(y\ne 0\), and z is close to \(\kappa _I/2\) by (4.3) and (4.6). Further, (4.8) gives
So, after the coordinate-transform \(\Psi :(z,y)\mapsto (zy^2,y)\), where \(y\ne 0\) and z is close to \(\kappa _I/2\), \(\Phi \) becomes \( \Phi ^\Psi (z,y):=\Psi ^{-1}\circ \Phi \circ \Psi (z,y)=\Psi ^{-1}(\Phi (zy^2,y)), \) hence equations (4.8) and (4.9) give
Therefore, defining \(\Phi ^\Psi (z,0):=(z,0)\) extends \(\Phi ^\Psi \) to a real analytic mapping in a neighborhood of \((\kappa _I/2,0)\).
Summing up, the analytic map \(\Phi ^\Psi \) fixes the points (z, 0) near \((\kappa _I/2,0)\) and has the derivative \(\mathsf D\Phi ^\Psi (\kappa _I/2,0)=\left( {\begin{matrix}1&{}0\\ 0&{}k\end{matrix}}\right) \).
Thus \(\Phi ^\Psi \) satisfies the conditions in Theorem 2.1 with vectors (1, 0) and (0, 1), so there is a neighborhood \(\mathcal {N}\) of \((\kappa _I/2,0)\) such that the set
is the graph of a \(C^1\) function from \(\ell _{(0,1)}\cap \mathcal {N}\) to \(\ell _{(1,0)}\cap \mathcal {N}\). This proves the statement of the lemma. \(\square \)
Lemma 4.3
If two Hilbert geometries have two common Riemannian points Q and P, and their borders coincide in some neighborhood of line PQ, then the two Hilbert geometries coincide.
Proof
Let \((\mathcal {L},d_{\mathcal {L}})\) and \((\mathcal {M},d_{\mathcal {M}})\) be Hilbert geometries with common Riemannian points Q and P. Assume that there is a neighborhood \(\mathcal {N}\) of line PQ that intersects the border of our Hilbert geometries in two common arcs \(\mathcal {I}_0\) and \(\mathcal {J}_0\).
Let line PQ intersect \(\mathcal {I}_0\) and \(\mathcal {J}_0\) in points I and J, respectively. We can assume without loss of generality that the points are ordered as \(I\prec Q\prec P\prec J\). So, we can use the notations already introduced in this paper.
Observe that \(\mathcal {C}^{\mathcal {L}}_{Q}\equiv \mathcal {C}^{\mathcal {M}}_{Q}\) and \(\mathcal {C}^{\mathcal {L}}_{P}\equiv \mathcal {C}^{\mathcal {M}}_{P}\), because the common arcs of \(\partial \mathcal {L}\) and \(\partial \mathcal {M}\) determine small common arcs of the quadratic infinitesimal circles near line QP. Thus both \(\Phi _P\) and \(\Phi _Q\) map any common arc of \(\partial \mathcal {L}\) and \(\partial \mathcal {M}\) to a common arc of \(\partial \mathcal {L}\) and \(\partial \mathcal {M}\).
We generate common arcs by defining \(\mathcal {J}_{k+1}:=\Phi _Q(\mathcal {I}_{k})\) and \(\mathcal {I}_{k+1}:=\Phi _P(\mathcal {J}_k)\) for every \(k=0,1,\ldots \). Let \(\alpha _k\) (\(k=0,1,\ldots \)) be the angle \(\mathcal {I}_{k}\) subtends at Q, and let \(\beta _k\) (\(k=0,1,\ldots \)) be the angle \(\mathcal {J}_{k}\) subtends at P.
To show that it is contradictory, assume that every \(\alpha _k\) and \(\beta _k\) (\(k=0,1,\ldots \)) is less than \(\pi \). Then we clearly have \(\beta _0<\alpha _1<\beta _2<\alpha _3<\cdots<\beta _{2k}<\alpha _{2k+1}<\beta _{2k+2}<\cdots <\pi \). So \(\mathcal {I}=\lim _{k\rightarrow \infty }\mathcal {I}_{2k+1}\) subtends angle \(\alpha =\lim _{k\rightarrow \infty }\alpha _{2k+1}\le \pi \), and \(\mathcal {J}=\lim _{k\rightarrow \infty }\mathcal {J}_{2k}\) subtends angle \(\beta =\lim _{k\rightarrow \infty }\beta _{2k}\le \pi \). From the sequence of inequalities \(\alpha =\beta \) follows, hence \(\Phi _Q(\mathcal {I})=\mathcal {J}\) and \(\Phi _P(\mathcal {J})=\mathcal {I}\). Then the assumption implies that \(\alpha =\beta <\pi \), which contradicts \(Q\ne P\). So one of \(\alpha _k\) or \(\beta _k\) (\(k=0,1,\ldots \)) is at least \(\pi \), say \(\alpha _k\ge \pi \). Then \(\mathcal {I}_{k}\cup \Phi _Q(\mathcal {I}_{k})\) covers \(\partial \mathcal {L}\) and \(\partial \mathcal {M}\), and the lemma is proved. \(\square \)
Theorem 4.4
If a Hilbert geometry has two Riemannian points, and its boundary is twice differentiable where it is intersected by the line joining those Riemannian points, then it is a Cayley–Klein model of the hyperbolic space.
Proof
By Lemma 4.1, there is an ellipse \(\mathcal {E}\) touching \(\mathcal {M}\) in I, J, such that \(\mathcal {C}^{\overline{\mathcal {E}}}_Q \equiv C_Q^{\mathcal {M}}\) and \(\mathcal {C}^{\overline{\mathcal {E}}}_P \equiv \mathcal {C}^{\mathcal {M}}_P\). Then Lemma 4.2 shows that \(\partial \mathcal {M}\) and \(\mathcal {E}\) coincide in a neighborhood of line PQ. Finally Lemma 4.3 proves that \(\partial \mathcal {M}\) and \(\mathcal {E}\) coincide. \(\square \)
5 Discussion
Theorem 4.4 can be reformulated in the language of geometric tomography [7]. It generalizes Falconer’s [5, Theorem 3].
Theorem 5.1
Let Q and P be two points of a strictly convex bounded open domain \(\mathcal {M}\) in the plane. Assume that the boundary \(\partial \mathcal {M}\) is twice differentiable where it intersects line QP. If the \((-1)\)-chord functions at Q and P are quadratic, then \(\partial \mathcal {M}\) is an ellipse.
Falconer’s [5, Theorem 4] gives that for any two fixed points P, Q several distinct strictly convex bounded open domains \(\mathcal {M}\) exist in the plane such that \(P,Q\in \mathcal {M}\), the \((-1)\)-chord functions at P and Q are equal to 1, the boundary \(\partial \mathcal {M}\) is differentiable at \(I,J\in PQ\cap \partial \mathcal {M}\) and twice differentiable everywhere else, and \(\partial \mathcal {M}\) is not an ellipse. Observe that in such an \(\mathcal {M}\) there can not exist a third inner point with quadratic \((-1)\)-chord function, because then \(\partial \mathcal {M}\) has to be an ellipse by Theorem 5.1. Reformulating these to Hilbert geometries we obtain the following.
Theorem 5.2
Let \(d_e\) be a Euclidean metric on the plane, and let \(\mathcal {C}_Q\) and \(\mathcal {C}_P\) be unit circles with centers Q and P, respectively.
Then there are several distinct non-hyperbolic Hilbert geometries \((\mathcal {M},d)\) such that \(\mathcal {C}_Q\) and \(\mathcal {C}_P\) are the only quadratical infinitesimal circles in \((\mathcal {M},d)\). The boundary of such a Hilbert geometry is twice differentiable except where it intersects line QP.
How the Hilbert geometries given in this theorem relate to the hyperbolic geometry remains an interesting question.
Theorem 4.4 also raises the problem to determine those pair of ellipses that are infinitesimal circles of a Hilbert geometry. This can be done by following the proof of Lemma 4.1; the details remain to the interested reader for now.
One can specialize [7, Theorem 6.2.14, p. 247] to the following:

This gives the following result which is more general, but weaker for the quadratical case than the combo of the lemmas in the previous section.
Theorem 5.3
If two Hilbert geometries \((\mathcal {L},d_{\mathcal {L}})\) and \((\mathcal {M},d_{\mathcal {M}})\) in the plane \(\mathbb {R}^2\) with boundaries of class \(C^{2+\delta }(\mathcal {S}^1)\), where \(\delta >0\), have two common infinitesimal circles \(\mathcal {C}^{\mathcal {L}}_P\equiv \mathcal {C}^{\mathcal {M}}_P\) and \(\mathcal {C}^{\mathcal {L}}_Q\equiv \mathcal {C}^{\mathcal {M}}_Q\), and have equal curvatures at the points where line PQ intersects the boundaries, then \(\mathcal {M}\equiv \mathcal {K}\).
Notice that this theorem states only a coincidence and therefore implies a weaker version of Theorem 4.4 only together with Lemma 4.1.
It is proved in [8, Theorem 2] that perpendicularity in a Hilbert geometry is reversible for two lines if the perpendicularity of these two lines is also reversible with respect to the local Minkowski geometry at the intersection of the linesFootnote 3. Calling such points Radon points, the question arises

Kelly and Paige proved in [9] that a Hilbert geometry is a Cayley–Klein model of the hyperbolic geometry if the perpendicularity is symmetric. Since the Riemannian points are Radon points, Theorem 4.4 supports our conjecture that the existence of two Radon points implies the symmetry of the perpendicularity if twice differentiability of the boundary is provided. If not, then Theorem 5.2 proves that even two Riemannian points are not enough to guarantee the symmetry of perpendicularity in Hilbert geometries.
Looking for possible higher dimensional analogs of Theorem 4.4 one can use [3, (16.12), p. 91] which says that

This immediately implies the following generalization of Theorem 4.4.
Theorem 5.4
If a Hilbert geometry has twice differentiable boundary and has a Riemannian point P such that for some fixed \(k\in \{2,\ldots ,n-1\}\) on every k-plane through P there is an other Riemannian point, then it is a Cayley–Klein model of the hyperbolic space.
Notes
If \(\lambda _{{\varvec{v}}}^\pm =\infty \), then \(P_{{\varvec{v}}}^\pm \) is an ideal point.
Point (0, 1) will always be chosen outside \(\ell \) so as to help calculations.
Thus, perpendicularity in the plane is symmetric at a point if and only if the indicatrix of the local Minkowski metric is a Radon curve [10].
References
Beltrami, E.: Risoluzione del problema: riportare i punti di una superficie sopra un piano in modo che le linee geodetiche vengano rappresentate da linee rette. Opere I, 262–280 (1865)
Beltrami, E.: Risoluzione del problema: riportare i punti di una superficie sopra un piano in modo che le linee geodetiche vengano rappresentate da linee rette. Ann. Mat. 1(7), 185–204 (1865). https://doi.org/10.1007/BF03198517
Busemann, H.: The Geometry of Geodesics. Academic Press, New York (1955)
Busemann, H., Kelly, P.J.: Projective Geometry and Projective Metrics. Academic Press, New York (1953)
Falconer, K.J.: On the equireciprocal problem. Geom. Dedicata 14, 113–126 (1983). https://doi.org/10.1007/BF00181619
Falconer, K.J.: Differentiation of the limit mapping in a dynamical system. J. Lond. Math. Soc. 27, 356–372 (1983). https://doi.org/10.1112/jlms/s2-27.2.356
Gardner, R.J.: Geometric Tomography 2nd edn., Encyclopedia of Mathematics and its Applications 58. Cambridge University Press, Cambridge, 2006 (1996)
Kay, D.: The ptolemaic inequality in Hilbert geometry. Pacific J. Math. 21(2), 293–301 (1967)
Kelly, P.J., Paige, L.J.: Symmetric perpendicularity in Hilbert geometries. Pacific J. Math. 2, 319–322 (1952)
Martini, H., Swanepoel, K.J.: Antinorms and Radon curves. Aequ. Math. 72, 110–138 (2006). https://doi.org/10.1007/s00010-006-2825-y
Acknowledgements
Open access funding provided by University of Szeged (SZTE). The author appreciates Tibor Ódor for a discussion where problem (5.1) was arisen.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Research was supported by NFSR of Hungary (NKFIH) under grant numbers K 116451 and KH_18 129630, and by the Ministry of Human Capacities, Hungary grant 20391-3/2018/FEKUSTRAT.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Kurusa, Á. Hilbert geometries with Riemannian points. Annali di Matematica 199, 809–820 (2020). https://doi.org/10.1007/s10231-019-00901-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10231-019-00901-5
Keywords
- Hilbert geometry
- Projective metric
- Beltrami’s theorem
- Riemannian point
- Geometric tomography
- \((-1)\)-Chord function