
Abstract
Motivated by the large amount of results obtained for minimal and positive constant mean curvature surfaces in several ambient spaces, the aim of this paper is to obtain half-space theorems for properly immersed surfaces in \({\mathbb {R}}^3\) whose mean curvature is given as a prescribed function of its Gauss map. In order to achieve this purpose, we will study the behavior at infinity of a one-parameter family of properly embedded annuli that are analogous to the usual minimal catenoids.
Similar content being viewed by others

1 Introduction
One of the most beautiful theorems in the theory of immersed minimal surfaces in \({\mathbb {R}}^3\) is the half-space theorem due to Hoffman and Meeks [9], which can be formulated as follows:
Theorem 1.1
(Half-space theorem) A connected, proper, possibly branched, non-planar minimal surface in \({\mathbb {R}}^3\) cannot be contained in a half-space.
Their proof is based on a clever application of two properties that minimal surfaces in \({\mathbb {R}}^3\) satisfy:
- 1.
The coordinates of a minimal surface in \({\mathbb {R}}^3\) are harmonic, and thus, minimal surfaces satisfy the tangency principle: Two minimal surfaces cannot be tangent in an interior point.
- 2.
For every plane \(\Pi \subset {\mathbb {R}}^3\) and each line L orthogonal to \(\Pi \), there exists a one-parameter family of properly embedded minimal annuli \(\{{\mathcal {C}}(r)\}_{r>0}\) that are rotationally symmetric around L, such that i)\(\{{\mathcal {C}}(r)\}_{r>0}\) smoothly converges to a double covering of \(\Pi -(\Pi \cap L)\) when \(r\rightarrow 0\) and ii) for each fixed \(r_0>0\), \({\mathcal {C}}(r_0)\) is a symmetric bi-graph over \(\Pi \) with both components having unbounded height w.r.t. \(\Pi \).
The one-parameter family of properly embedded minimal annuli \(\{{\mathcal {C}}(r)\}_{r>0}\) are the minimal catenoids. Note that this theorem is not true in an Euclidean space \({\mathbb {R}}^n\) of arbitrary dimension, since minimal catenoids of dimension \(n-1\) for \(n>3\) are contained between two parallel planes.
Inspired by the ideas developed by Hoffman and Meeks, the existence of half-space theorems in a class of immersed surfaces in several ambient spaces has attracted the attention of a large amount of geometers, becoming an active and fruitful field of research. In [11], Rosenberg and Rodriguez obtained a half-space theorem for constant mean curvature one surfaces in the hyperbolic three space \({\mathbb {H}}^3\). Their proof is based on the original ideas of Hoffman and Meeks and on the fact that minimal surfaces in \({\mathbb {R}}^3\) are locally isometric to constant mean curvature one surfaces in \({\mathbb {H}}^3\). Later, Hauswirth et al. [8] obtained a half-space theorem for constant mean curvature 1 / 2 surfaces in the product space \({\mathbb {H}}^2\times {\mathbb {R}}\), and they exploited it to prove that complete multigraphs in \({\mathbb {H}}^2\times {\mathbb {R}}\) are indeed entire graphs over the whole hyperbolic plane \({\mathbb {H}}^2\). Finally, Daniel and Hauswirth [6] obtained half-space theorems for minimal surfaces in the Lie group \({\mathrm {Nil}}_3\) and the Heisenberg space, and Daniel et al. [7] proved half-space theorems in \({\mathrm {Nil}}_3\) and also in the Lie group \({\mathrm {Sol}}_3\).
Motivated by these results, our purpose in this paper is to obtain half-space theorems for the following class of immersed surfaces in \({\mathbb {R}}^3\): let be \({\mathcal {H}}\in C^1({\mathbb {S}}^2)\). We say that an immersed surface \(\Sigma \) in \({\mathbb {R}}^3\) has prescribed mean curvature\({\mathcal {H}}\) if the mean curvature \(H_\Sigma \) of \(\Sigma \) satisfies at each \(p\in \Sigma \)
where \(\eta :\Sigma \rightarrow {\mathbb {S}}^2\) is the Gauss map of \(\Sigma \). In short, we will say that \(\Sigma \) is an \({\mathcal {H}}\)-surface.
The definition of this class of immersed surfaces in \({\mathbb {R}}^3\) has its origins in the famous Christoffel and Minkowski problems for ovaloids; see, e.g., [5]. In particular, the existence and uniqueness of ovaloids with prescribed mean curvature (1.1) were studied among others by Alexandrov and Pogorelov [1, 10]. Besides the milestones reached concerning the uniqueness of ovaloids with prescribed mean curvature, the global properties of immersed surfaces in \({\mathbb {R}}^3\) governed by Eq. (1.1) remained largely unexplored until the author in joint work with Gálvez and Mira [2, 3] developed the global theory of surfaces with prescribed mean curvature. In [3], we studied the structure of properly embedded \({\mathcal {H}}\)-surfaces and curvature estimates for stable \({\mathcal {H}}\)-surfaces in \({\mathbb {R}}^3\). In [2], we studied rotational \({\mathcal {H}}\)-hypersurfaces, obtaining several examples with different geometric properties and a Delaunay-type classification result. See also [4] for the resolution of the Björling problem for \({\mathcal {H}}\text {-}\mathrm {surfaces}\) in \({\mathbb {R}}^3\).
The rest of the introduction is devoted to highlight the organization of the paper:
In Sect. 2, we recall some basic properties of \({\mathcal {H}}\text {-}\mathrm {surfaces}\) in \({\mathbb {R}}^3\). Locally, \({\mathcal {H}}\text {-}\mathrm {surfaces}\) are governed by a quasilinear, elliptic PDE, and thus, they satisfy the mean curvature comparison principle and the maximum principle; see Lemmas 2.3 and 2.4. For the particular case that the prescribed function \({\mathcal {H}}\) depends only on the height of the sphere, then it can be realized as a one-dimensional function and Eq. (1.1) reads as
In this situation, if \({\mathcal {H}}\in {\mathfrak {C}}^1([-1,1])\), see Eq. (2.3) for a proper definition of the space \({\mathfrak {C}}^1([-1,1])\), the study carried out in [2] reveals that there exists a one-parameter family \(\{\Sigma _{\mathcal {H}}(r)\}_{r>0}\) of properly embedded annuli, called \({\mathcal {H}}\)-catenoids, parametrized by their necksizes, that are bi-graphs over a horizontal plane and will play the same role as minimal catenoids for our purpose. In Propositions 2.5 and 2.6, we state some comparison theorems concerning the height and the derivative of the \({\mathcal {H}}\)-catenoids.
In Sect. 3, we analyze the behavior at infinity of the \({\mathcal {H}}\)-catenoids, i.e., the boundedness or unboundedness of the heights of their graphical components. In Proposition 3.2, we prove that the behavior at infinity of a family of \({\mathcal {H}}\)-catenoids is determined by the behavior of an \({\mathcal {H}}\)-catenoid \(\Sigma _{\mathcal {H}}(r_0)\), for an arbitrary \(r_0>0\). In Proposition 3.4, we relate the limit behavior of two functions \({\mathcal {H}},{\mathcal {F}}\in {\mathfrak {C}}^1([-1,1])\) at the points \(y=\pm 1\) with the behavior at infinity of two catenoids \(\Sigma _{\mathcal {H}}(r_0)\) and \(\Sigma _{\mathcal {F}}(r_0)\). We conclude this analysis in Theorem 3.5, proving that two prescribed functions \({\mathcal {H}}\) and \({\mathcal {F}}\) with the same limit behavior at the points \(y=\pm 1\) determine prescribed mean curvature catenoids with the same behavior at infinity.
Bearing in mind the results obtained in Sect. 3 and in Sect. 4, we study the behavior at infinity of \({\mathcal {H}}\)-catenoids for concrete choices of the prescribed function \({\mathcal {H}}\). Indeed, we prove in Theorem 4.1 that the prescribed functions \({\mathcal {H}}_\alpha (y)=-(1-y^2)^\alpha ,\ \alpha >1\) generate \({\mathcal {H}}_\alpha \)-catenoids with unbounded height.
Finally, in Sect. 5 we take advantage of the analysis carried out in the previous sections in order to obtain half-space theorems for properly immersed \({\mathcal {H}}\text {-}\mathrm {surfaces}\), provided that \({\mathcal {H}}\in C^1({\mathbb {S}}^2)\) satisfies some necessary hypothesis.
2 Properties of \({\mathcal {H}}\)-surfaces
Definition 2.1
Let be \({\mathcal {H}}\in C^1({\mathbb {S}}^2)\). An immersed surface \(\Sigma \) in \({\mathbb {R}}^3\) is an \({\mathcal {H}}\)-surface if its mean curvature \(H_\Sigma \) is given at every \(p\in \Sigma \) by
where \(\eta :\Sigma \rightarrow {\mathbb {S}}^2\) is the Gauss map of \(\Sigma \).
It is clear from this definition that the only ambient isometries which are also isometries for the class of immersed \({\mathcal {H}}\text {-}\mathrm {surfaces}\) are Euclidean translations; any other ambient isometry changes the expression of \(\eta \) and thus would not preserve Eq. (2.1).
Before formulating two key properties that \({\mathcal {H}}\text {-}\mathrm {surfaces}\) satisfy, we need to introduce the concept of when a surface is locally above the other. Let be \(\Sigma _1\) and \(\Sigma _2\) two immersed surfaces in the Euclidean space \({\mathbb {R}}^3\). Suppose that there exists some point \(p\in \Sigma _1\cap \Sigma _2\) such that \((\eta _{\Sigma _1})_p=(\eta _{\Sigma _2})_p\), where \(\eta _{\Sigma _i}\) stands for the unit normal of the surface \(\Sigma _i\). Take coordinates \((x_1,x_2,x_3)\in {\mathbb {R}}^3\) such that \(\partial x_3=(\eta _i)_{p_0}\). In this situation, it is known that each \(\Sigma _i\) can be expressed locally around p as a graph \(x_3=u_i(x_1,x_2)\), \(i=1,2\), defined in the same open set \(\Omega \) of the tangent plane \(T_p\Sigma _1=T_p\Sigma _2\) containing the origin \(\mathbf{o }\) such that \(u_i(\mathbf{o })=p\).
Definition 2.2
With the previous hypothesis, we say that \(\Sigma _1\)lies locally above\(\Sigma _2\) if \(u_1\ge u_2\) in \(\Omega \).
The condition \(\Sigma _1\)which lies locally above\(\Sigma _2\) will be written in short as \(\Sigma _1\ge \Sigma _2\).
The next lemma relates the mean curvature of two surfaces lying one locally above the other:
Lemma 2.3
(Mean curvature comparison principle) Let be \(\Sigma _1\) and \(\Sigma _2\) two immersed surfaces in \({\mathbb {R}}^3\) and denote by \(H_i\) to the mean curvature of \(\Sigma _i,\ i=1,2\). If \(\Sigma _1\ge \Sigma _2\) around some \(p\in \Sigma _1\cap \Sigma _2\), then \(H_1(p)\ge H_2(p)\).
The study carried out in Sect. 2.1 in [2] reveals that \({\mathcal {H}}\text {-}\mathrm {surfaces}\) in \({\mathbb {R}}^3\) are solutions of a quasilinear, second-order, elliptic PDE. In particular, the class of immersed \({\mathcal {H}}\text {-}\mathrm {surfaces}\) satisfies the Hopf maximum principle in both its interior and boundary versions, a result that has the following geometric implication:
Lemma 2.4
(Maximum principle for \({\mathcal {H}}\)-surfaces) Let be \(\Sigma _1,\Sigma _2\) two immersed \({\mathcal {H}}\)-surfaces in \({\mathbb {R}}^3\). Assume that one of the following two conditions holds:
- 1.
There exists \(p\in {\mathrm{int}}(\Sigma _1)\cap {\mathrm{int}}(\Sigma _2)\) such that \((\eta _{\Sigma _1})_p=(\eta _{\Sigma _2})_p\), where \(\eta _{\Sigma _i}\) denotes the unit normal of \(\Sigma _i\), \(i=1,2\).
- 2.
There exists \(p\in \partial \Sigma _1\cap \partial \Sigma _2\) such that \((\eta _{\Sigma _1})_p=(\eta _{\Sigma _2})_p\) and \((\xi _{\Sigma _1})_p=(\xi _{\Sigma _2})_p\), where \((\xi _{\Sigma _i})_p\) denotes the interior unit conormal of \(\partial \Sigma _i\).
Assume moreover that \(\Sigma _1\) lies around p at one side of \(\Sigma _2\). Then \(\Sigma _1=\Sigma _2\).
As we mentioned in the introduction of Sect. 2, the only isometries of \({\mathbb {R}}^3\) that preserve Eq. (2.1) are Euclidean translations. Thus, if we expect to define rotationally symmetric \({\mathcal {H}}\text {-}\mathrm {surfaces}\), additional symmetries have to be imposed to the prescribed function \({\mathcal {H}}\). In this fashion, if suppose that the prescribed function \({\mathcal {H}}\in C^1({\mathbb {S}}^2)\) only depends on the height of the sphere, then Eq. (2.1) for an immersed \({\mathcal {H}}\text {-}\mathrm {surface}\)\(\Sigma \) reads as
where \({\mathfrak {h}}\in C^1([-1,1])\) and the quantity \(\langle (\eta _\Sigma )_p,e_3\rangle \) is the so-called angle function, which will be denoted in short by \(\nu _\Sigma (p)\).
Now, the ambient isometries that preserve Eq. (2.2) are the following: Euclidean translations, the isometric SO(2)-action of rotations that leave pointwise fixed any vertical line, and reflections w.r.t. any vertical plane; any of these isometries leaves invariant the angle function of an immersed surface and thus preserves Eq. (2.2).
Otherwise stated, we will restrict ourselves to prescribed functions that depend only on the height of the sphere, and thus, the class of \({\mathcal {H}}\text {-}\mathrm {surfaces}\) is governed by Eq. (2.2). For the sake of clarity, the one-dimensional prescribed function \({\mathfrak {h}}\) that appears in Eq. (2.2) will be denoted again by \({\mathcal {H}}\).
In Sect. 3, in [2] the authors studied rotationally symmetric \({\mathcal {H}}\text {-}\mathrm {surfaces}\) for several choices of prescribed one-dimensional functions \({\mathcal {H}}\in C^1([-1,1])\), obtaining a large amount of rotational examples with different topological properties and behaviors at infinity. In this section, we will restrict ourselves to the following class of one-dimensional functions
For the particular choice \({\mathcal {H}}\in {\mathfrak {C}}^1([-1,1])\), Proposition 3.6 in [2] proves the existence of the following family of rotationally symmetric \({\mathcal {H}}\text {-}\mathrm {surfaces}\):
There exists a continuous one-parameter family \(\{\Sigma _{\mathcal {H}}(r)\}_{r>0}\) of properly embedded, rotationally symmetric \({\mathcal {H}}\text {-}\mathrm {surfaces}\) around the vertical line passing through the origin, all having the topology of an annulus. For each \(r_0>0\), \(\Sigma _{\mathcal {H}}(r_0)\) is a bi-graph over the exterior of the disk \(D(0,r_0)\) contained in a horizontal plane (which can be supposed to be the plane \(\{z=0\}\) after a vertical translation). The annulus \(\Sigma _{\mathcal {H}}(r_0)\) is foliated by parallel circumferences, and the smallest one is the given by the intersection \(\Sigma _{\mathcal {H}}(r_0)\cap \{z=0\}\), which is called the waist of \(\Sigma _{\mathcal {H}}(r_0)\) and whose necksize, i.e., the radius of the waist, is precisely \(r_0\). In particular, each \(\Sigma _{\mathcal {H}}(r_0)\) is contained inside \({\mathbb {R}}^3-(D(0,r_0)\times {\mathbb {R}})\).
Each component of the bi-graph defines an end of \(\Sigma _{\mathcal {H}}(r_0)\). We define \(\Sigma _{\mathcal {H}}^+(r_0):=\Sigma _{\mathcal {H}}(r_0)\cap \{z\ge 0\}\) (resp. \(\Sigma _{\mathcal {H}}^-(r_0):=\Sigma _{\mathcal {H}}(r_0)\cap \{z\le 0\}\)) the upper (resp. lower) end of \(\Sigma _{\mathcal {H}}(r_0)\). If we denote by \(\eta _{\Sigma _{\mathcal {H}}(r_0)}\) to the unit normal of \(\Sigma _{\mathcal {H}}(r_0)\), then \(\eta _{\Sigma _{\mathcal {H}}(r_0)}\) points inward at the waist, upward at the upper end and downward at the lower end (Fig. 1).

An \({\mathcal {H}}\)-catenoid for the prescribed choice \({\mathcal {H}}(y)=-(1-y^2)^2\), which is a symmetric bi-graph over the horizontal plane \(\{z=0\}\). The waist is plotted in black
Because of the orientation that \(\Sigma _{\mathcal {H}}(r_0)\) has, we can parametrize the upper end \(\Sigma _{\mathcal {H}}^+(r_0)\) by rotating the graph of a function \(f_{\Sigma _{\mathcal {H}}^+(r_0)}:(r_0,\infty )\rightarrow {\mathbb {R}}\) around the vertical axis passing through the origin. When fixing \({\mathcal {H}}\in {\mathfrak {C}}^1([-1,1])\) and \(r_0>0\), in order to save notation, the function \(f_{\Sigma _{\mathcal {H}}^+(r_0)}\) will be just denoted by \(f_+\). A parametrization of \(\Sigma _{\mathcal {H}}^+(r_0)\) minus one meridian is given by
The orientation induced by \(\psi _{f_+}\) is given by the unit normal
which happens to be the upward one in this upper end. For this parametrization \(\psi _{f_+}\), the mean curvature \(H_{\Sigma _{\mathcal {H}}^+(r_0)}\) of \(\Sigma _{\mathcal {H}}^+(r_0)\) satisfies the following ODE
As \(\Sigma _{\mathcal {H}}^+(r_0)\) is an \({\mathcal {H}}\)-surface, Eq. (2.1) now reads as
where \(\nu _{f_+}:\Sigma _{\mathcal {H}}^+(r_0)\rightarrow {\mathbb {R}}\) is the angle function
Moreover, we can solve Eq. (2.6) in terms of \(f_+''(x)\) and conclude that is a solution of the ODE
Let us analyze the lower end \(\Sigma _{\mathcal {H}}^-(r_0)\). If we parametrize \(\Sigma _{\mathcal {H}}^-(r_0)\) as in Eq. (2.4) for a function \(f_-\), then this parametrization does not define an \({\mathcal {H}}\)-surface for the prescribed choice \({\mathcal {H}}\), since this time the unit normal induced by this parametrization, namely
is again the upward one. In particular, the mean curvature with this parametrization is positive. Nonetheless, up to a change in the orientation, which in particular changes the sign of the mean curvature, this parametrization defines the lower end of \(\Sigma _{\mathcal {H}}(r_0)\).
The functions \(f_+\) and \(f_-\) will be called the upper height and lower height of \(\Sigma _{\mathcal {H}}(r_0)\), respectively. These functions are defined in the same interval \((r_0,\infty )\), and they can be smoothly glued together at \(x=r_0\), where they meet each other at the plane \(\{z=0\}\) in an orthogonal way, defining the waist of the \({\mathcal {H}}\)-catenoid.
2.1 Comparison of the height and the derivative of \({\mathcal {H}}\)-catenoids
In the case that we have a rotational \({\mathcal {H}}\text {-}\mathrm {surface}\), and in particular for prescribed mean curvature catenoids, the mean curvature comparison principle has the following implication.
Proposition 2.5
Let be \({\mathcal {H}},{\mathcal {F}}\in {\mathfrak {C}}^1([-1,1])\) and \(r_0>0\), and suppose that \({\mathcal {H}}(y)>{\mathcal {F}}(y)\) for all \(y\in (-1,1)\).
- 1.
If \(h_+(x)\) and \(f_+(x)\) denote the upper heights of \(\Sigma _{\mathcal {H}}(r_0)\) and \(\Sigma _{\mathcal {F}}(r_0)\), then \(h_+(x)>f_+(x)\) for all \(x>r_0\).
- 2.
If \(h_-(x)\) and \(f_-(x)\) denote the lower heights of \(\Sigma _{\mathcal {H}}(r_0)\) and \(\Sigma _{\mathcal {F}}(r_0)\), then \(h_-(x)<f_-(x)\) for all \(x>r_0\).
Proof
The proof will be done for the upper ends of \(\Sigma _{\mathcal {H}}(r_0)\) and \(\Sigma _{\mathcal {F}}(r_0)\), since the argument is similar for the lower ends.
Consider the catenoids \(\Sigma _{\mathcal {F}}(r_0)\) and \(\Sigma _{\mathcal {H}}(r_0)\), whose necksizes are exactly \(r_0\). Both \(\Sigma _F(r_0)\) and \(\Sigma _{\mathcal {H}}(r_0)\) are tangent at \(r_0\) with unit normals agreeing at their waists, and thus, the mean curvature comparison principle ensures us that \(\Sigma _{\mathcal {H}}(r_0)\) lies locally above \(\Sigma _{\mathcal {F}}(r_0)\). Because \(\Sigma _H(r_0)\) lies locally above \(\Sigma _{\mathcal {F}}(r_0)\), we have that \(h_+(x)>f_+(x)\) for \(x>r_0\) close enough to \(r_0\).
Arguing by contradiction, suppose that there exists some \(r_1>r_0\) such that \(h_+(r_1)=f_+(r_1)\). Consider the slab \({\mathcal {S}}\) in \({\mathbb {R}}^3\) determined by the vertical planes \(\{x=r_0\}\) and \(\{x=r_1\}\), and denote by \(\widetilde{\Sigma _{\mathcal {H}}^+(r_0)}\) and \(\widetilde{\Sigma _{\mathcal {F}}^+(r_0)}\) to the intersections of \(\Sigma _{\mathcal {H}}^+(r_0)\) and \(\Sigma _{\mathcal {F}}^+(r_0)\) with \({\mathcal {S}}\). Notice that \(\widetilde{\Sigma _{\mathcal {H}}^+(r_0)}\) and \(\widetilde{\Sigma _{\mathcal {F}}^+(r_0)}\) only intersect each other along their (compact) boundaries, which are contained in \(\partial {\mathcal {S}}\).
Consider the uniparametric group of vertical translations \(T_s(p)=p+(0,0,s),\ s>0\), and the translated \({\mathcal {H}}\text {-}\mathrm {surfaces}\)\(T_s(\widetilde{\Sigma _{\mathcal {F}}^+(r_0)})\). Because the boundary of \(\widetilde{\Sigma _{\mathcal {F}}^+(r_0)}\) is compact, there exists some \(s_0>0\) such that \(T_{s_0}(\widetilde{\Sigma _{\mathcal {F}}^+(r_0)})\cap \widetilde{\Sigma _{\mathcal {H}}^+(r_0)}=\varnothing \). Then, we decrease the parameter s starting from \(s_0\) until we find an instant \(s_1\in (0,s_0)\) such that \(T_{s_1}(\widetilde{\Sigma _{\mathcal {F}}^+(r_0)})\) has a first contact point of intersection \(p_1\) with \(\widetilde{\Sigma _{\mathcal {H}}^+(r_0)}\). Since \(\widetilde{\Sigma _{\mathcal {H}}^+(r_0)}\) and \(\widetilde{\Sigma _{\mathcal {F}}^+(r_0)}\) only intersected along their boundaries, this point of intersection must be an interior one. See Fig. 2 for a diagram of this process.

A diagram showing the upward and downward movement of the compact piece \(\widetilde{\Sigma _{\mathcal {F}}^+(r_0)}\), arriving to a contradiction
At \(p_1\), the unit normals of \(\widetilde{\Sigma _{\mathcal {H}}^+(r_0)}\) and \(T_{s_1}(\widetilde{\Sigma _{\mathcal {F}}^+(r_0)})\) agree. Moreover, \(T_{s_1}(\widetilde{\Sigma _{\mathcal {F}}^+(r_0)})\) lies above \(\widetilde{\Sigma _{\mathcal {H}}^+(r_0)}\) around \(p_1\), but their mean curvatures satisfy
where we have used that \({\mathcal {H}}(y)>{\mathcal {F}}(y)\) pointwise. This is a contradiction with the mean curvature comparison principle.
The same proof holds for the lower ends, by just considering vertical translations that decrease the height. This completes the proof of Proposition 2.5.\(\square \)
The next proposition gives us information about the derivatives of the \({\mathcal {H}}\)-catenoids.
Proposition 2.6
Let be \({\mathcal {H}},{\mathcal {F}}\in {\mathfrak {C}}^1([-1,1])\) such that \({\mathcal {H}}(y)>{\mathcal {F}}(y)\) for all \(y\in (-1,1)\), and let be \(r_0>0\) and \(x_0>r_0\). Denote by \(h_+,h_-,f_+,f_-\) to the upper and lower heights of \(\Sigma _{\mathcal {H}}(r_0)\) and \(\Sigma _{\mathcal {F}}(r_0)\), respectively. Then,
- 1.
If \({h_+}'(x_0)>{f_+}'(x_0)\), we have \({h_+}'(x)>{f_+}'(x)\) for all \(x>x_0\).
- 2.
If \({h_-}'(x_0)<{f_-}'(x_0)\), we have \({h_+}'(x)<{f_+}'(x)\) for all \(x>x_0\).
Proof
The proof will be done for the upper heights \(h_+,f_+\), since it is analogous for the lower heights. For the sake of clarity, we will drop the sub index \((\cdot )_+\), and just write h, f. First, recall from Eq. (2.8) that both h and f are solutions of the ODEs
where \(\nu _h=1/\sqrt{1+h'(x)^2}\) is the angle function of \(\Sigma _{\mathcal {H}}^+(r_0)\), and the same holds for \(\nu _f\).
Let us write
Notice that Eq. (2.10) can be expressed as
As \({\mathcal {H}}(y)>{\mathcal {F}}(y)\), then it is straightforward that
In this situation, the following inequality holds
As \(h'(x_0)>f'(x_0)\) and \(f''(x)\) is a solution for the ODE \(\phi _{\mathcal {F}}(x,f'(x))\), a classical comparison theorem for ODEs applied to Eq. (2.11) ensures us that \(h'(x)>f'(x)\) for every \(x>x_0\).
The same proof works for the case of lower ends. Notice that in this situation, because of the change in the orientation explained above, the mean curvatures are positives, and thus, the comparison of the ODEs in Eq. (2.11) now reads as \(\phi _{\mathcal {H}}(x,y)<\phi _{\mathcal {F}}(x,y)\). Now the hypothesis \(h'(x_0)<f'(x_0)\) and the comparison theorem for ODEs concludes the proof for lower ends. This completes the proof of Proposition 2.6. \(\square \)
Remark 2.7
Suppose that \({\mathcal {H}},F\in {\mathfrak {C}}^1([-1,1])\) satisfy \({\mathcal {H}}(y)>{\mathcal {F}}(y)\) for all \(y\in (-1,1)\), and let be \(r_0>0\). Then, we know that \(\Sigma _{\mathcal {H}}(r_0)\) lies locally above \(\Sigma _{\mathcal {F}}(r_0)\) near \(r_0\). In particular, the functions \(h_+,f_+\) defining the upper ends \(\Sigma _{\mathcal {H}}^+(r_0)\) and \(\Sigma _{\mathcal {F}}^+(r_0)\), respectively, satisfy \(h_+(x)>f_+(x)\) and \(h'_+(x)>f'_+(x)\), for \(x\in (r_0,r_0+\varepsilon )\) where \(\varepsilon >0\) is small enough. In virtue of Propositions 2.5 and 2.6, this behavior is fulfilled for every \(x>r_0\), and not only in a neighborhood of \(r_0\).
The same holds for the lower ends, after a change in the signs of the inequalities.
3 Comparison of the behavior at infinity of prescribed mean curvature catenoids
Once we have formulated some comparison results for the height and the derivative of \({\mathcal {H}}\)-catenoids, we take care of the behavior at infinity of the \({\mathcal {H}}\)-catenoids. First, we need to settle on the concept of when an \({\mathcal {H}}\)-catenoid goes to infinity.
Definition 3.1
Let be \({\mathcal {H}}\in {\mathfrak {C}}^1([-1,1])\) and \(r_0>0\), and consider the \({\mathcal {H}}\)-catenoid \(\Sigma _{\mathcal {H}}(r_0)\). Denote by \(f_+\) and \(f_-\) to the upper and lower heights of \(\Sigma _{\mathcal {H}}(r_0)\), respectively.
- 1.
We say that \(\Sigma _{\mathcal {H}}(r_0)\) has unbounded upper height (resp. bounded upper height) if the function \(f_+(x)\) is unbounded (resp. bounded).
- 2.
We say that \(\Sigma _{\mathcal {H}}(r_0)\) has unbounded lower height (resp. bounded lower height) if the function \(f_-(x)\) is unbounded (resp. bounded).
- 3.
If both \(f_+(x)\) and \(f_-(x)\) are unbounded (resp. bounded), we will simply say that \(\Sigma _{\mathcal {H}}(r_0)\) has unbounded height (resp. bounded height).
The behavior at infinity of an \({\mathcal {H}}\)-catenoid \(\Sigma _{\mathcal {H}}(r_0)\) is just the boundedness or unboundedness of its height functions. The following proposition proves that for a fixed \({\mathcal {H}}\), all the \({\mathcal {H}}\)-catenoids \(\Sigma _{\mathcal {H}}(r)\) have the same behavior at infinity.
Proposition 3.2
Let be \({\mathcal {H}}\in {\mathfrak {C}}^1([-1,1])\) and \(r_0>0\). Suppose that the \({\mathcal {H}}\)-catenoid \(\Sigma _{\mathcal {H}}(r_0)\) has unbounded (resp. bounded) upper height. Then, all the \({\mathcal {H}}\)-catenoids \(\{\Sigma _{\mathcal {H}}(r)\}_r\) have unbounded (resp. bounded) upper height. The same holds for the lower height.
Proof
As usual, we present the proof for the upper height, since the lower height case is proved in the same way.
We start our proof with the case that the \({\mathcal {H}}\)-catenoid \(\Sigma _{\mathcal {H}}(r_0)\) has unbounded upper height.
First, consider some \(r_*<r_0\) and define \(\lambda =r_*/r_0<1\). Consider the homothety \(\Phi _\lambda :{\mathbb {R}}^3\rightarrow {\mathbb {R}}^3,\ \Phi (p)=\lambda p\) for all \(p\in {\mathbb {R}}^3\), and let us define \(\lambda \Sigma _{\mathcal {H}}(r_0):=\Phi _\lambda (\Sigma _{\mathcal {H}}(r_0))\). The mean curvature \(H_{\lambda \Sigma _{\mathcal {H}}(r_0)}\) of \(\lambda \Sigma _{\mathcal {H}}(r_0)\) satisfies \(H_{\lambda \Sigma _{\mathcal {H}}(r_0)}=1/\lambda H_{\Sigma _{\mathcal {H}}(r_0)}\), and thus, the uniqueness of the Cauchy problem yields
Note that an homothety does not change the behavior at infinity of an \({\mathcal {H}}\)-catenoid, since it only multiplies by \(\lambda \ne 0\) its upper height.
Consider also the \({\mathcal {H}}\)-catenoid \(\Sigma _{\mathcal {H}}(r_*)\). Thus, both \(\Sigma _{\mathcal {H}}(r_*)\) and \(\Sigma _{1/\lambda {\mathcal {H}}}(r_*)\) are tangent along their waists, and because \(\lambda <1\) Proposition 2.5 ensures us that \(\Sigma _{\mathcal {H}}(r_*)\) lies above \(\Sigma _{1/\lambda {\mathcal {H}}}(r_*)\). As \(\Sigma _{\mathcal {H}}(r_0)\) was supposed to have unbounded upper height, then \(\Sigma _{\mathcal {H}}(r_*)\) has to have also unbounded upper height. On the contrary, at a finite point the \({\mathcal {H}}\)-catenoid \(\Sigma _{1/\lambda {\mathcal {H}}}(r_*)\) would intersect the \({\mathcal {H}}\)-catenoid \(\Sigma _{\mathcal {H}}(r_*)\), which would yield to a contradiction with Proposition 2.5; see Fig. 3.

Homothetical \({\mathcal {H}}\)-catenoid \(\lambda \Sigma _{\mathcal {H}}(r_0)\) has to stay below the \({\mathcal {H}}\)-catenoid \(\Sigma _{\mathcal {H}}(r_*)\)
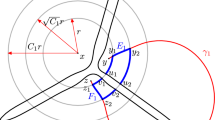
Suppose now that \(r_*>r_0\). We will use the fact that all the behavior at infinity of the \({\mathcal {H}}\)-catenoids \(\{\Sigma _{\mathcal {H}}(r)\}_{r<r_0}\) agrees with the behavior at infinity of \(\Sigma _{\mathcal {H}}(r_0)\). When r tends to zero, the sequence of \({\mathcal {H}}\)-catenoids \(\{\Sigma _{\mathcal {H}}(r)\}_{r}\) converges to a double covering of the plane \(\{z=0\}\) minus the origin; see Proposition 6.2 in “Appendix”. Thus, for \(r_1\) close enough to zero, the \({\mathcal {H}}\)-catenoid \(\Sigma _{\mathcal {H}}(r_1)\) would intersect the \({\mathcal {H}}\)-catenoid \(\Sigma _{\mathcal {H}}(r_*)\) at the boundary of a slab \({\mathcal {S}}\), such that \(\Sigma _{\mathcal {H}}(r_1)\) lies below \(\Sigma _{\mathcal {H}}(r_*)\) inside \({\mathcal {S}}\). Moving \(\Sigma _{\mathcal {H}}(r_1)\cap {\mathcal {S}}\) upward and downward as in the proof of Proposition 2.5, we arrive to a contradiction with the maximum principle; see Fig. 4. Thus, \(\Sigma _{\mathcal {H}}(r_*)\) has to have unbounded upper height as well.

\({\mathcal {H}}\)-catenoid \(\Sigma _{\mathcal {H}}(r_*)\) would be intersected by an \({\mathcal {H}}\)-catenoid \(\Sigma _{\mathcal {H}}(r_1)\) for some \(r_1\) small enough, contradicting the maximum principle
From the discussions made above, we may also conclude that if \(\Sigma _{\mathcal {H}}(r_0)\) have bounded upper height, then all the \({\mathcal {H}}\)-catenoids \(\{\Sigma _{\mathcal {H}}(r)\}_{r>0}\) have bounded upper height.
The same arguments work for the lower height, and thus, Proposition 3.2 is proved. \(\square \)
Let be \({\mathcal {H}}\in {\mathfrak {C}}^1([-1,1])\) and \(r_0>0\). The phase plane study carried out in [2] ensures us that the mean curvature of each \({\mathcal {H}}\)-catenoid vanishes near infinity, and thus, the angle function at the upper (resp. lower) end has to converge to 1 (resp. to \(-1\)). This fact suggests us that the study of the \({\mathcal {H}}\)-catenoids near infinity is closely related to the behavior of the prescribed function \({\mathcal {H}}\) at the points \(y=\pm 1\).
First, we give a definition concerning two prescribed functions with the same limit behavior.
Definition 3.3
Let be \({\mathcal {H}},{\mathcal {F}}\in {\mathfrak {C}}^1([-1,1])\).
- 1.
We will say that \({\mathcal {H}}\) and \({\mathcal {F}}\) have the same behavior at\(y=1\) if and only if
$$\begin{aligned} \lim _{y\rightarrow 1}\frac{{\mathcal {H}}(y)}{{\mathcal {F}}(y)}=C_1, \end{aligned}$$(3.1)where \(C_1\) is a nonzero constant. This condition will be denoted by \({\mathcal {H}}\sim _1{\mathcal {F}}\).
- 2.
We will say that \({\mathcal {H}}\) and \({\mathcal {F}}\) have the same behavior at\(y=-1\) if and only if
$$\begin{aligned} \lim _{y\rightarrow -1}\frac{{\mathcal {H}}(y)}{{\mathcal {F}}(y)}=C_2, \end{aligned}$$(3.2)where \(C_2\) is a nonzero constant. This condition will be denoted by \({\mathcal {H}}\sim _{-1}{\mathcal {F}}\).
- 3.
If Eqs. (3.1) and (3.2) hold, we will say that \({\mathcal {H}}\) and \({\mathcal {F}}\) have the same behavior at\(y=\pm 1\). This condition will be denoted by \({\mathcal {H}}\sim {\mathcal {F}}\).
A straightforward consequence from this definition is that each relation \(\sim _1,\sim _{-1}\), and \(\sim \) is an equivalence relation in the set of functions \({\mathfrak {C}}^1([-1,1])\).
The fact that two functions \({\mathcal {H}}\) and \({\mathcal {F}}\) have the same behavior at either \(\pm 1\) or both is equivalent to the following: For each \(\varepsilon \in (0,2)\), there exist nonzero constants \(M,M'\) (depending on \(\varepsilon \)) such that
The following proposition reveals that two functions with the same behavior at either \(y=\pm 1\) generate classes of prescribed mean curvature catenoids with the same behavior at infinity.
Proposition 3.4
Let be \({\mathcal {H}},{\mathcal {F}}\in {\mathfrak {C}}^1([-1,1])\) and \(r_0>0\), suppose that \({\mathcal {H}}\sim _1{\mathcal {F}}\) and consider the prescribed mean curvature catenoids \(\Sigma _{\mathcal {H}}(r_0)\) and \(\Sigma _{\mathcal {F}}(r_0)\). Then, the catenoid \(\Sigma _{\mathcal {H}}(r_0)\) has bounded (resp. unbounded) upper height if and only if \(\Sigma _{\mathcal {F}}(r_0)\) has bounded (resp. unbounded) upper height.
The same holds when \({\mathcal {H}}\sim _{-1}{\mathcal {F}}\) for their lower heights.
Proof
We present the proof when \({\mathcal {H}}\sim _1{\mathcal {F}}\), since the case for the relation \(\sim _{-1}\) is analogous.
Because \({\mathcal {H}}\sim _1{\mathcal {F}}\), Eq. (3.3) ensures us the existence of nonzero constants \(M,M'\) such that
Consider the \({\mathcal {H}}\)-catenoid \(\Sigma _{\mathcal {H}}(r_0)\), and suppose first that \(\Sigma _{\mathcal {H}}(r_0)\) has unbounded upper height. Now consider the catenoid \(\Sigma _{M'{\mathcal {F}}}(r_0)\). Both \(\Sigma _{\mathcal {H}}(r_0)\) and \(\Sigma _{M'{\mathcal {F}}}(r_0)\) are tangent along their waists, and because \(M'{\mathcal {F}}(y)>{\mathcal {H}}(y)\) for all \(y\in [0,1)\), Proposition 2.5 ensures us that \(\Sigma _{M'{\mathcal {F}}}(r_0)\) lies above \(\Sigma _{\mathcal {H}}(r_0)\) always. As the upper height of \(\Sigma _{\mathcal {H}}(r_0)\) is unbounded, the upper height of \(\Sigma _{M'{\mathcal {F}}}(r_0)\) has to be also unbounded. Because \(\Sigma _{M'{\mathcal {F}}}(r_0)\) and \(\Sigma _{\mathcal {F}}(r_0)\) have the same behavior at infinity, we conclude that \(\Sigma _{\mathcal {F}}(r_0)\) has also unbounded upper height.
If the upper height of \(\Sigma _{\mathcal {H}}(r_0)\) is bounded, we compare \(\Sigma _{\mathcal {H}}(r_0)\) and the catenoid \(\Sigma _{M{\mathcal {F}}}(r_0)\).
The same comparison arguments hold for the case when \({\mathcal {H}}\sim _{-1}{\mathcal {F}}\). This proves Proposition 3.4. \(\square \)
Combining Propositions 3.2 and 3.4, we state the following theorem
Theorem 3.5
Let be \({\mathcal {H}},{\mathcal {F}}\in {\mathfrak {C}}^1([-1,1])\), \(r_0>0\) and consider the \({\mathcal {H}}\)-catenoid \(\Sigma _{\mathcal {H}}(r_0)\). Then,
- 1.
If \({\mathcal {H}}\sim _1{\mathcal {F}}\), then the upper end of each \({\mathcal {F}}\)-catenoid has the same behavior at infinity as the upper end of \(\Sigma _{\mathcal {H}}(r_0)\).
- 2.
If \({\mathcal {H}}\sim _{-1}{\mathcal {F}}\), then the lower end of each \({\mathcal {F}}\)-catenoid has the same behavior at infinity as the lower end of \(\Sigma _{\mathcal {H}}(r_0)\).
- 3.
If \({\mathcal {H}}\sim {\mathcal {F}}\), then both ends of each \({\mathcal {F}}\)-catenoid have the same behavior at infinity as the ends of \(\Sigma _{\mathcal {H}}(r_0)\).
4 The behavior at infinity of some prescribed mean curvature catenoids
The arbitrariness of the prescribed function in Eq. (2.8) disables us to explicitly study the behavior at infinity for an arbitrary choice \({\mathcal {H}}\in {\mathfrak {C}}^1([-1,1])\). However, the study carried out in Sect. 3 ensures us that the knowledge of the behavior at infinity for some family of \({\mathcal {H}}\)-catenoids automatically reveals the behavior at infinity of the family of \({\mathcal {F}}\)-catenoids, for each \({\mathcal {F}}\in {\mathfrak {C}}^1([-1,1])\) such that \({\mathcal {F}}\sim {\mathcal {H}}\).
Motivated by this fact, in this section we will study the family of \({\mathcal {H}}\)-catenoids for some concrete choices of the prescribed function \({\mathcal {H}}\). Specifically, we will study the one-parameter family of \({\mathfrak {C}}^1([-1,1])\) functions \({\mathcal {H}}_\alpha (y):=-(1-y^2)^\alpha ,\ \alpha >1\). Let us emphasize that we are only interested about the behavior of the prescribed functions at \(y=\pm 1\). Hence, the exponent 2 in the function \(-(1-y^2)^\alpha \) is only for ensuring that \({\mathcal {H}}_\alpha \) vanishes at both \(y=\pm 1\). For instance, at \(y=1\) the function \({\mathcal {H}}_\alpha \) has the same behavior as the function \(-(1-y)^\alpha \); the same holds at \(y=-1\) and the function \(-(1+y)^\alpha \).
The theorem that we prove in this section is the following:
Theorem 4.1
Let be \(\alpha >1\) and consider the function \({\mathcal {H}}_\alpha (y)=-(1-y^2)^\alpha \). Then, for each \({\mathcal {F}}\in {\mathfrak {C}}^1([-1,1])\) we have:
- 1.
If \({\mathcal {F}}\sim _1{\mathcal {H}}_\alpha \), the \({\mathcal {F}}\)-catenoids \(\{\Sigma _{\mathcal {F}}(r)\}_{r>0}\) have unbounded upper height.
- 2.
If \({\mathcal {F}}\sim _{-1}{\mathcal {H}}_\alpha \), the \({\mathcal {F}}\)-catenoids \(\{\Sigma _{\mathcal {F}}(r)\}_{r>0}\) have unbounded lower height.
- 3.
If \({\mathcal {F}}\sim {\mathcal {H}}_\alpha \), the \({\mathcal {F}}\)-catenoids \(\{\Sigma _{\mathcal {F}}(r)\}_{r>0}\) have unbounded both upper and lower heights.
Proof
We will present the proof of Item 1, since Items 2 and 3 are proved similarly.
Fix some \(\alpha >1\). We will prove Item 1 of Theorem 4.1 by showing that for some \(r_0\), the \({\mathcal {H}}_\alpha \)-catenoid \(\Sigma _{{\mathcal {H}}_\alpha }(r_0)\) has unbounded upper height. Then, in virtue of Theorem 3.5 the upper ends of all the \({\mathcal {F}}\)-catenoids \(\{\Sigma _{\mathcal {F}}(r)\}_{r>0}\) for \({\mathcal {F}}\sim _1{{\mathcal {H}}_\alpha }\) will have the same behavior at infinity as \(\Sigma _{{\mathcal {H}}_\alpha }(r_0)\).
The study of the behavior at infinity of the \({\mathcal {H}}_\alpha \)-catenoid \(\Sigma _{{\mathcal {H}}_\alpha }(r_0)\) will be done by proving several claims.
Claim 1.Consider the upper end of the\({\mathcal {H}}_\alpha \)-catenoid\(\Sigma _{{\mathcal {H}}_\alpha }(r_0)\)parametrized as the graph of a functionf(x). Then,
\(\square \)
Proof of Claim 1
It is known that the upper end of the minimal catenoid \({\mathcal {C}}(r_0)\) is parametrized by the function
At distance \(x=r_0\), both \({\mathcal {C}}(r_0)\) and \(\Sigma _{{\mathcal {H}}_\alpha }(r_0)\) are tangent along their waists, where their unit normals agree. The mean curvature comparison principle ensures us that \({\mathcal {C}}(r_0)\) lies above \(\Sigma _{{\mathcal {H}}_\alpha }(r_0)\) around \(x=r_0\). In particular, Proposition 2.6 ensures us that \(g'(x)>f'(x)\) for all \(x>r_0\). Thus, the bound
holds by just substituting the value of \(g'(x)\). Hence, Claim 1 is proved. \(\square \)
We now derive an inequality involving the derivative of the function f(x). First, observe that for the prescribed choices \({\mathcal {H}}_\alpha \), the value of \({\mathcal {H}}_\alpha (\nu _f(x))\) is given by
From Eq. (2.8), we obtain the following
Integrating from \(r_0\) to \(x>r_0\), we obtain
After taking exponentials and some operations, we yield
Claim 2.Let be\(\alpha >1\)andf(x) the function that defines the upper end of\(\Sigma _{{\mathcal {H}}_\alpha }\). Then,
where \(c_0\) is a positive constant.
Proof of Claim 2
Lets analyze the bound on \(f'(x)\) in Eq. (4.1). Suppose that the integral \(\int _{r_0}^xf'(t)^{2\alpha -1}dt\) is finite when x goes to infinity and that the limit \(\lim _{x\rightarrow \infty }xf(x)\) exists. Then, \(\lim _{x\rightarrow \infty }xf(x)\) is necessarily a nonzero constant \(c_0>0\).
Thus, our goal in this claim is twofold: Firstly, we have to prove that the integral \(\int _{r_0}^xf'(t)^{2\alpha -1}dt\) is finite when x tends to infinity, and secondly, we have to prove that the limit \(\lim _{x\rightarrow \infty }xf(x)\) exists.
In order to prove that \(\int _{r_0}^\infty f'(t)^{2\alpha -1}dt\) is finite, we consider the minimal catenoid \({\mathcal {C}}(r_0)\). In Claim 1, we proved that
and by powering to the \(2\alpha -1\), we arrive to
Integrating from \(r_0\) to x yields
Because \(\alpha >1\), we have \(2\alpha -1>1\), and thus, the right-hand side of Eq. (4.2) is a finite integral when x diverges to \(\infty \). This implies
By making x tend to infinity in Eq. (4.1), we conclude that \(xf'(x)\) is bounded between two positive constants.
Now we will prove that \(\lim _{x\rightarrow \infty }xf'(x)\) exists as a straightforward consequence from the fact that \(xf'(x)\) is a monotonous function. Indeed, the derivative \((xf'(x))'\) is
where we have used that \(f''(x)\) satisfies the ODE that appears in Eq. (2.8) and that \({\mathcal {H}}\) is negative and \(f'(x)\) is positive.
As \(xf'(x)\) is a monotonous function which is bounded between two positive constants, its limit must be a positive number, say \(c_0\). This concludes the proof of Claim 2. \(\square \)
Claim 3.The upper height of the\({\mathcal {H}}\)-catenoid\(\Sigma _{\mathcal {H}}(r_0)\)is unbounded.
Proof of Claim 3
From Claims 1 and 2, we know that there exists some positive constant such that
where h(x) is a positive function satisfying \(\lim _{x\rightarrow \infty }h(x)=0\). Integrating \(f'(x)\) yields
Thus, the function f(x) is unbounded and so the upper height of \(\Sigma _{\mathcal {H}}(r_0)\) is unbounded, concluding the proof of Claim 3. \(\square \)
Because \(\Sigma _{{\mathcal {H}}_\alpha }(r_0)\) has unbounded upper height, this property also holds in the equivalence class of \({\mathcal {H}}_\alpha \) defined by the relation \(\sim _1\), in virtue of Theorem 3.5. This concludes the proof of Theorem 4.1. \(\square \)
5 Half-space theorems for properly immersed \({\mathcal {H}}\)-surfaces
In this last section, we will obtain half-space theorems for properly immersed \({\mathcal {H}}\text {-}\mathrm {surfaces}\), by exploiting the study carried out in the previous sections concerning the behavior at infinity of the prescribed mean curvature catenoids.
First of all, let us define the hemispheres by \({\mathbb {S}}^2_+:={\mathbb {S}}^2\cap \{z>0\}\) and \({\mathbb {S}}^2_-:={\mathbb {S}}^2\cap \{z<0\}\). The main theorem of this paper is the following:
Theorem 5.1
Let be \({\mathcal {H}}\in C^1({\mathbb {S}}^2)\) and M a connected, properly immersed, non-planar \({\mathcal {H}}\)-surface in \({\mathbb {R}}^3\).
- 1.
If there exists \({\mathcal {F}}\in {\mathfrak {C}}^1([-1,1])\) such that
$$\begin{aligned} \lim _{y\rightarrow 1}\frac{{\mathcal {F}}(y)}{-(1-y^2)^\alpha }=C_1\ne 0 \end{aligned}$$(5.1)holds for some \(\alpha >1\) and
$$\begin{aligned} {\mathcal {H}}(x)>{\mathcal {F}}(\langle x,e_3\rangle ),\ \forall x\in {\mathbb {S}}^2_+-\{e_3\},\qquad {\mathcal {H}}(x)\le 0,\ \forall x\in {\mathbb {S}}^2_-, \end{aligned}$$then M cannot be contained in a lower half-space \(\{z\le c_0;\ c_0\in {\mathbb {R}}\}\).
- 2.
If there exists \({\mathcal {F}}\in {\mathfrak {C}}^1([-1,1])\) such that
$$\begin{aligned} \lim _{y\rightarrow -1}\frac{{\mathcal {F}}(y)}{-(1-y^2)^\beta }=C_2\ne 0 \end{aligned}$$(5.2)holds for some \(\beta >1\) and
$$\begin{aligned} {\mathcal {H}}(x)>{\mathcal {F}}(\langle x,e_3\rangle ),\ \forall x\in {\mathbb {S}}^2_--\{-e_3\},\qquad {\mathcal {H}}(x)\le 0,\ \forall x\in {\mathbb {S}}^2_+, \end{aligned}$$then M cannot be contained in an upper half-space \(\{z\ge c_0;\ c_0\in {\mathbb {R}}\}\).
- 3.
If Eqs. (5.1) and (5.2) hold for some \({\mathcal {F}}\in {\mathfrak {C}}^1([-1,1])\) and \(\alpha ,\beta >1\), and \(0\ge {\mathcal {H}}(x)>{\mathcal {F}}(\langle x,e_3\rangle ),\ \forall x\in {\mathbb {S}}^2\), then M cannot be contained in any horizontal half-space.
Proof
The proof of this theorem is based on the original ideas firstly introduced by Hoffman and Meeks [9]. First, suppose that the hypothesis of Item 1 is fulfilled.
Arguing by contradiction, suppose that M is a connected, properly immersed, non-planar \({\mathcal {H}}\)-surface contained in a half-space \(\{z\le c_0;\ c_0\in {\mathbb {R}}\}\). After a vertical translation, we can suppose that M is contained in the lower half-space determined by the plane \(\Pi :=\{z=0\}\), but is not contained in any \(\{z\le -\varepsilon ;\ \varepsilon >0\}\). First, notice that M cannot intersect the plane \(\Pi \). Indeed, if such intersection exists we would be able to find a point \(p\in M\cap \Pi \), which is necessarily an interior tangent point. Denoting by \(\eta _\Pi \equiv e_3\) and \(\eta _M\) to the unit normals of \(\Pi \) and M, respectively, then one of the following two cases must occur:
- 1.
At p, we have \((\eta _\Pi )_p=e_3=(\eta _M)_p\). If \({\mathcal {H}}(e_3)=0\), then both M and \(\Pi \) are \({\mathcal {H}}\text {-}\mathrm {surfaces}\) for the same prescribed function \({\mathcal {H}}\), and \(\Pi \) lies locally above M at p. The maximum principle 2.4 ensures us that \(M=\Pi \), contradicting the fact that M is non-planar. If \({\mathcal {H}}(e_3)>0\), then \(H_M(p)={\mathcal {H}}((\eta _M)_p)={\mathcal {H}}(e_3)>0\) and \(\Pi \) lies locally above M around p; this is a contradiction with the mean curvature comparison principle 2.3.
- 2.
At p, we have \((\eta _\Pi )_p=e_3=-(\eta _M)_p\). Because \({\mathcal {H}}\) is non-positive in \({\mathbb {S}}^2_-\), we have \(H_M(p)={\mathcal {H}}((\eta _M)_p)={\mathcal {H}}(-e_3)\le 0\). If \({\mathcal {H}}(-e_3)=0\), we arrive to a contradiction arguing as in the previous item. If \({\mathcal {H}}(-e_3)<0\) since \(\Pi \) is planar, we can change the orientation of \(\Pi \) to be \(-e_3\) without changing its mean curvature. This contradicts the mean curvature comparison principle 2.3, since \(\Pi \) and M have at p both unit normals equal to \(-e_3\), \(\Pi \) lies below M around p, \(\Pi \) is planar and \(H_M(p)={\mathcal {H}}(-e_3)<0\).
In any case, we have that \(M\cap \Pi =\varnothing \), and thus, M is strictly contained in the half-space \(\{z<0\}\).
Because M is a proper surface which does not intersect the plane \(\Pi \), the origin \(\mathbf{o }\) cannot be an accumulation point of M, and thus, there exists an Euclidean ball \(B(\mathbf{o },R_0),\ R_0>0\) which is disjoint from M. Now consider the family of \({\mathcal {F}}\)-catenoids \(\{\Sigma _{\mathcal {F}}(r)\}_{r>0}\). In virtue of Eq. (5.1) and Theorem 4.1, we ensure that the family of \({\mathcal {F}}\)-catenoids have unbounded upper height. In particular, the upper end of \(\Sigma _{\mathcal {F}}(r)\), which we will denote by \(\Sigma _{\mathcal {F}}^+(r)\), is a graph with unbounded height w.r.t. the plane \(\Pi \), and this holds for every \(r>0\). Notice that for every \(r<R_0\) we have \(\left( \Sigma _{\mathcal {F}}^+(r)\cap \Pi \right) \subset B(\mathbf{o },R_0)\), and in particular \(\partial \Sigma _{\mathcal {F}}^+(r)\subset B(\mathbf{o },R_0)\) for every \(r<R_0\).
Again, as M is proper there exists \(\varepsilon >0\) small enough such that the vertical translation \(M^+:=M+\varepsilon (0,0,1)\) does not intersect the ball \(B(\mathbf{o },R_0)\). From its definition, it is clear that \(M^+\) lies below the half-space \(\{z<\varepsilon \}\). Now consider the family of upper ends \(\{\Sigma _{\mathcal {F}}^+(r)\}_{R_0>r>0}\). The boundary of each \(\Sigma _{\mathcal {F}}^+(r_0)\) is contained in \(B(\mathbf{o },R_0)\), and thus, they do not intersect \(M^+\). Moreover, if the parameter r converges to zero, the upper ends \(\Sigma _{\mathcal {F}}^+(r)\) converge on compact sets to the plane \(\{z=0\}\) minus the origin \(\mathbf{o }\); see Proposition 6.2. By continuity and because \(\Sigma _{\mathcal {F}}^+(r_0)\) has unbounded height w.r.t. the plane \(\Pi \), there has to exist a finite, first interior contact point \(p_0\) between some \(\Sigma _{\mathcal {F}}^+(r_0),\ r_0>0\) and \(M^+\); see Fig. 5.

First interior contact point \(p_0\) between some \(\Sigma _{\mathcal {F}}^+(r_0)\) and \(M^+\)
Now we argue as follows:
- 1.
If \((\eta _{\Sigma _{\mathcal {F}}^+(r_0)})_{p_0}=(\eta _{M^+})_{p_0}\), then \(\Sigma _{\mathcal {F}}^+(r_0)\) lies locally above \(M^+\) around \(p_0\). But at \(p_0\) we have
$$\begin{aligned} H_{\Sigma _{\mathcal {F}}^+(r_0)}(p_0)={\mathcal {F}}(\langle (\eta _{\Sigma _{\mathcal {F}}^+(r_0)})_{p_0},e_3\rangle )<{\mathcal {H}}((\eta _{\Sigma _{\mathcal {F}}^+(r_0)})_{p_0})={\mathcal {H}}((\eta _{M^+})_{p_0})=H_{M^+}(p_0), \end{aligned}$$contradicting the mean curvature comparison principle 2.3, since \(\Sigma _{\mathcal {F}}^+(r_0)\) lies locally above \(M^+\) around \(p_0\).
- 2.
If \((\eta _{\Sigma _{\mathcal {F}}^+(r_0)})_{p_0}=-(\eta _M)_{p_0}\), then we change the orientation of M, obtaining a \(-{\mathcal {H}}\)-surface with the opposite orientation \(-\eta _M\) which lies in \({\mathbb {S}}^2_-\). Thus, \(\Sigma _{\mathcal {F}}^+(r_0)\) would lie locally above \(M^+\) around \(p_0\). But \(\Sigma _{\mathcal {F}}^+(r_0)\) has negative mean curvature at \(p_0\), and \(M^+\) has nonnegative mean curvature at \(p_0\) after this change in the orientation. This is again a contradiction with the mean curvature comparison principle 2.3.
In any case, we arrive to a contradiction, and thus, M cannot be contained in a lower half-space.
The same arguments apply for the case that Item 2 holds, by just comparing M with the lower ends of \(\Sigma _{\mathcal {F}}(r)\). The latter item is a straightforward consequence from the two previous cases.
This proves Theorem 5.1. \(\square \)
Observation 5.2
Note that we are only interested about the behavior of the function \({\mathcal {H}}\) near the points \(N=(0,0,1)\) and \(S=(0,0,-1)\). Thus, Theorem 5.1 is still valid if we are able to find a negative, one-dimensional function \({\mathcal {F}}\) satisfying Equations (5.1) and (5.2), such that \({\mathcal {H}}(x)>{\mathcal {F}}(\langle x,e_3\rangle )\) for every x in a small neighborhood of the points N, S (where \({\mathcal {F}}\) is defined). Then, we would be able to extend the function \({\mathcal {F}}\) to the interval \([-1,1]\) in such a way that its extension is smaller than \({\mathcal {H}}\) in the whole sphere.
We want to finish this paper with further discussions on the existence of properly immersed \({\mathcal {H}}\)-surfaces actually lying in a half-space. For that, fix any \(n>0\), consider the function \(f_n(x)=-1/x^n\) and let \(\Sigma _n\) be the rotational surface generated by rotating the graph of \(f_n(x)\). By substituting \(f_n'(x)\) in Eq. (2.7), we get that the angle function \(\nu _n(x)\) of \(\Sigma _n\) is a positive, strictly increasing function such that for every \(\varepsilon \in (0,1)\) there exists \(x_0=x_0(\varepsilon )>0\) with \(\nu _n(x_0)=1-\varepsilon \). A straightforward computation from Equations (2.6) and (2.7) shows that the mean curvature of \(\Sigma _n\) in terms of \(\nu _n(x)\) is given by a one-dimensional function \({\mathcal {H}}_n:(0,1]\rightarrow {\mathbb {R}}\) satisfying the following: There exists \(\varepsilon _0\in (0,1)\) such that \({\mathcal {H}}_n(y)<0,\ \forall y\in [1-\varepsilon _0,1)\), \({\mathcal {H}}_n(1)=0\) and \({\mathcal {H}}_n(y)\) has the same behavior at \(y=1\) as the function \(-(1-y^2)^{\alpha (n)}\), where \(\alpha (n):=\frac{2+n}{2+2n}\); see Fig. 6, the blue plots.
Now, we restrict the function \({\mathcal {H}}_n\) to \([1-\varepsilon _0,1]\) and smoothly extend it to the whole interval \([-1,1]\) by a negative, even function \({\widehat{{\mathcal {H}}}}_n(y)\). This function \({\widehat{{\mathcal {H}}}}_n(y)\) belongs to the space \({\mathfrak {C}}^1([-1,1])\), and consequently, there exists the one-parameter family of \({\widehat{{\mathcal {H}}}}_n\)-catenoids \(\{{\widehat{\Sigma }}(r)\}_{r>0}\); see Fig. 6, the orange plots. It is clear that, up to vertical translations, the upper end of each \({\widehat{\Sigma }}(r)\) agrees with the graph of \(-1/x^n\) for x big enough; in fact, by uniqueness they agree when the angle function of \({\widehat{\Sigma }}(r)\) reaches the value \(1-\varepsilon _0\) (that is, when the extension \({\widehat{{\mathcal {H}}}}_n\) is again \({\mathcal {H}}_n\)). Therefore, the catenoids \(\{{\widehat{\Sigma }}(r)\}_{r>0}\) have bounded both upper and lower heights, and in virtue of Theorem 3.5, the same holds for the catenoids corresponding to the function \(-(1-y^2)^{\alpha (n)}\).

In blue, the graph of \(-1/x^2\) and the function \({\mathcal {H}}_2(y)\). In orange, an extension \({\widehat{{\mathcal {H}}}}_2(y)\) and the profile of an \({\widehat{{\mathcal {H}}}}_2\)-catenoid \({\widehat{\Sigma }}(r)\) with bounded upper and lower heights. The dashed part of \({\widehat{\Sigma }}(r)\) is the one that agrees with the graph of \(-1/x^2\) (color figure online)
Note that the function \(\alpha (n):(0,\infty )\rightarrow {\mathbb {R}}\) is a continuous, strictly decreasing function such that
In particular, for every \(\beta _0\in (1/2,1)\) we can choose \(n_0=\frac{2-2\beta _0}{2\beta _0-1}>0\) such that \(\alpha (n_0)=\beta _0\). With these discussions, the next result follows easily:
Proposition 5.3
Let be \(\beta \in (1/2,1)\) and define \(n=\frac{2-2\beta }{2\beta -1}\). Then, the catenoids corresponding to the prescribed function \(-(1-y^2)^\beta \) have bounded upper and lower heights.
We also want to emphasize that there are prescribed functions whose catenoids have one end with bounded height and the other with unbounded height. For example, consider the function \({\mathcal {H}}(y)=-(1+y)^{3/4}(1-y)^2\) and let \(\Sigma (r)\) be an \({\mathcal {H}}\)-catenoid. Then, Theorems 3.5, 4.1 and Proposition 5.3 ensure us that the upper end of \(\Sigma (r)\) has unbounded height, while the lower end of \(\Sigma (r)\) has bounded height; see Fig. 7.

Profile of an \({\mathcal {H}}\)-catenoid for the function \({\mathcal {H}}(y)=-(1+y)^{3/4}(1-y)^2\). The upper end has unbounded height, while the lower end has bounded height
References
Alexandrov, A.D.: Uniqueness theorems for surfaces in the large, I, Vestnik Leningrad Univ. 11, 5–17 (1956). (English translation): Am. Math. Soc. Transl. 21 (1962), 341–354
Bueno, A., Gálvez, J.A., Mira, P.: Rotational hypersurfaces of prescribed mean curvature, preprint. arxiv:1902.09405
Bueno, A., Gálvez, J.A., Mira, P.: The global geometry of surfaces with prescribed mean curvature in \({{\mathbb{R}}}^3\), preprint. arxiv:1802.08146
Bueno, A.: The Björling problem for prescribed mean curvature surfaces in \({\mathbb{R}}^3\), Ann. Glob. Ann. Geom. https://doi.org/10.1007/s10455-019-09657-w
Christoffel, E.B.: Über die Bestimmung der Gestalt einer krummen Oberfläche durch lokale Messungen auf derselben. J. Reine Angew. Math. 64, 193–209 (1865)
Daniel, B., Hauswirth, L.: Half-space theorem, embedded minimal annuli and minimal graphs in the Heisenberg group. Proc. Lond. Math. Soc. (3) 98(2), 445–470 (2009)
Daniel, B., Meeks III, W.H., Rosenberg, H.: Half-space theorems for minimal surfaces in \({{\rm Nil}}_3\) and \({{\rm Sol}}_3\). J. Differ. Geom. 88(1), 41–59 (2011)
Hauswirth, L., Rosenberg, H., Spruck, J.: On complete mean curvature \(1/2\) surfaces in \({\mathbb{H}}^2\times {{\mathbb{R}}}\). Commun. Anal. Geom. 16(5), 989–1005 (2008)
Hoffman, D., Meeks III, W.H.: The strong halfspace theorem for minimal surfaces. Invent. Math. 101(2), 373–377 (1990)
Pogorelov, A.V.: Extension of a general uniqueness theorem of A.D. Aleksandrov to the case of nonanalytic surfaces. Doklady Akad. Nauk SSSR 62, 297–299 (1948). (in Russian)
Rodriguez, L., Rosenberg, H.: Half-space theorems for mean curvature one surfaces in hyperbolic space. Proc. Am. Math. Soc. 126(9), 2755–2762 (1998)
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
The author was partially supported by MICINN-FEDER Grant No. MTM2016-80313-P, Junta de Andalucía Grant No. FQM325 and FPI-MINECO Grant No. BES-2014-067663.
Appendix
Appendix
This appendix is devoted to prove that the \({\mathcal {H}}\)-catenoids converge to a double covering of the plane minus the origin. The proof will be done by showing that the \({\mathcal {H}}\)-catenoids, outside a compact set that converges to the origin, have uniformly bounded second fundamental form, and then, we will be able to take limits as a straightforward consequence of a compactness argument.
Proposition 6.1
Let be \({\mathcal {H}}\in {\mathfrak {C}}^1([-1,1])\) and \(r_0\), and consider an \({\mathcal {H}}\)-catenoid \(\Sigma _{\mathcal {H}}(r_0)\). Then, the squared norm of the second fundamental form of the upper end \(\Sigma _{\mathcal {H}}^+(r_0)\) is given by
Proof
We will derive this identity by computing the principal curvatures of the upper end \(\Sigma _{\mathcal {H}}^+(r_0)\) parametrized as in Eq. (2.4).
Indeed, this parametrization is doubly orthogonal and the principal curvatures already appeared in Eq. (2.6); they are just the two terms on the r.h.s. of the equality. Thus,
where \(f_+:(r_0,\infty )\rightarrow {\mathbb {R}}\) is the function that defines the upper end \(\Sigma _{\mathcal {H}}^+(r_0)\) in Eq. (2.4).
Because \(|\sigma _{\Sigma _{\mathcal {H}}(r_0)}(x)|^2=\kappa _1(x)^2+\kappa _2(x)^2\), Eq. (6.1) yields by substituting the values of \(\kappa _1(x)\) and \(\kappa _2(x)\), and using that \(f_+''(x)\) is a solution of the ODE (2.8).
This concludes the proof of Proposition 6.1. \(\square \)
Notice that for computing the quantity \(|\sigma _{\Sigma _{\mathcal {H}}^-(r_0)}(x)|^2\) at the lower end \(\Sigma _{\mathcal {H}}^-(r_0)\) with the parametrization given in Eq. (2.4), we have to change its orientation that was given by the unit normal defined in Eq. (2.9), and the sign of the mean curvature. We omit the details.
Proposition 6.2
Let be \({\mathcal {H}}\in {\mathfrak {C}}^1([-1,1])\), and consider the one-parameter family of \({\mathcal {H}}\)-catenoids \(\{\Sigma _{\mathcal {H}}(r)\}_{r>0}\). Then, \(\{\Sigma _{\mathcal {H}}(r)\}_{r\rightarrow 0}\) converges in the \(C^3\) topology to a double covering of the plane \(\{z=0\}\) minus the origin.
Proof
The proof will be done as follows: For each \(r>0\), we will find an open subset in \(\Sigma _{\mathcal {H}}(r)\) with uniformly bounded second fundamental form, such that this open subset does not contain the waist of \(\Sigma _{\mathcal {H}}(r)\). At this point, a standard compactness argument for \({\mathcal {H}}\text {-}\mathrm {surfaces}\) obtained in [3] will eventually conclude the result.
Thus, our main objective is to properly define an open subset in each \(\Sigma _{\mathcal {H}}(r)\) having uniformly bounded second fundamental form. We will focus as usual in the upper end of \(\Sigma _{\mathcal {H}}(r)\), since the computations for the lower end are similar. In order to save notation, we will omit the super index \((\cdot )^+\) referring to the upper end.
Let be \(x_n=1/n,\ \nu _n=1-1/n^2,\ n\in {\mathbb {N}}\). The phase plane analysis done in [2] ensures us that for each \((x_n,\nu _n)\) there exists an \({\mathcal {H}}\)-catenoid \(\Sigma _{\mathcal {H}}(r_n)\), with \(r_n<x_n\) uniquely determined by \((x_n,\nu _n)\), such that the angle function \(\nu _{\Sigma _{\mathcal {H}}(r_n)}\) of \(\Sigma _{\mathcal {H}}(r_n)\) satisfies \(\nu _{\Sigma _{\mathcal {H}}(r_n)}(x_n)=\nu _n\).
Now, Eq. 6.1 ensures us that the squared norm of the second fundamental form of each \(\Sigma _{\mathcal {H}}(r_n)\) is given by
Fix some \(n\in {\mathbb {N}}\). If \(x>y>r_n\), then \(\nu _{\Sigma _{\mathcal {H}}(r_n)}(x)>\nu _{\Sigma _{\mathcal {H}}(r_n)}(y)\), and thus,
In particular, we have
If we compute \(|\sigma _{\Sigma _{\mathcal {H}}(r_n)}(x_n)|^2\), we get
Because \({\mathcal {H}}\) is a negative function vanishing at \(y=1\), we can consider the bound \(-{\mathcal {H}}(1-1/n)<1\) for \(n>n_0\), where \(n_0\in {\mathbb {N}}\) is big enough. Bearing this in mind, the following estimate holds
Now, plugging together Eqs. (6.2) and (6.3) yields
Now we argue similarly in the lower ends \(\Sigma _{\mathcal {H}}^-(r)\) to also obtain a uniformly bound of their second fundamental forms.
Thus, for every \(n>n_0\) the squared norm of the second fundamental form of the \({\mathcal {H}}\)-catenoid \(\widetilde{\Sigma _{\mathcal {H}}(r_n)}=\Sigma _{\mathcal {H}}(r_n)\cap \{x\ge x_n\}\) is uniformly bounded. At this point, a standard compactness argument for \({\mathcal {H}}\text {-}\mathrm {surfaces}\), see, e.g., Theorem 2.14 in [3], ensures us that the sequence \(\widetilde{\Sigma _{\mathcal {H}}(r_n)}\) smoothly converges in the \(C^3\) topology to a double covering of the plane \(\{z=0\}\) minus the origin. This proves Proposition 6.2. \(\square \)
Rights and permissions
About this article

Cite this article
Bueno, A. Half-space theorems for properly immersed surfaces in \({\mathbb {R}}^{3}\) with prescribed mean curvature. Annali di Matematica 199, 425–444 (2020). https://doi.org/10.1007/s10231-019-00886-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10231-019-00886-1