
Abstract
This work models the fluid-structure interactions associated with separating a solid from a soft elastic film in a liquid environment. One side of the soft film is permanently attached to a rigid substrate. The ensuing liquid flow and elastic deformations are derived by considering a system of partial differential equations, that govern the mechanics of the separation process. A finite element based computational scheme is developed to solve the governing equations and predict the resultant forces acting on the solid. It is shown that the resulting forces are influenced by the elasticity of the film for an initial duration and by the viscosity of the liquid at larger times. The proposed model is utilized to shed insights into the mechanics of the separation process in constrained-surface stereolithography process.








Similar content being viewed by others
References
Keyes DE, McInnes LC, Woodward C, Gropp W, Myra E, Pernice M, Bell J, Brown J, Clo A, Connors J et al (2013) Multiphysics simulations: challenges and opportunities. Int J High Perform Comput Appl 27(1):4–83
Kamensky D, Hsu MC, Schillinger D, Evans JA, Aggarwal A, Bazilevs Y, Sacks MS, Hughes TJ (2015) An immersogeometric variational framework for fluid-structure interaction: application to bioprosthetic heart valves. Comput Methods Appl Mech Eng 284:1005–1053
Younis MI (2004) Modeling and simulation of microelectromechanical systems in multi-physics fields. Ph. D. Thesis, Virginia Tech
Di Blasi C (1993) Modeling and simulation of combustion processes of charring and non-charring solid fuels. Prog Energy Combust Sci 19(1):71–104
Bhushan B (2003) Adhesion and stiction: mechanisms, measurement techniques, and methods for reduction. J Vac Sci Technol B 21(6):2262–2296
McFarlane JS, Tabor D (1950) Adhesion of solids and the effect of surface films. Proc R Soc Lond A Math Phys Eng Sci 202(1069):224–243
Gay C (2002) Stickiness some fundamentals of adhesion. Integr Comp Biol 42(6):1123–1126
Reynolds O (1886) On the theory of lubrication and its application to Mr. Beauchamp Tower’s experiments, including an experimental determination of the viscosity of olive oil. Proc R Soc Lond 40(242–245):191–203
Szeri AZ (2010) Fluid film lubrication. Cambridge University Press, Cambridge
Skotheim J, Mahadevan L (2004) Soft lubrication. Phys Rev Lett 92(24):245509
Kaveh F, Ally J, Kappl M, Butt HJ (2014) Hydrodynamic force between a sphere and a soft, elastic surface. Langmuir 30(39):11619–11624
Wang Y, Dhong C, Frechette J (2015) Out-of-contact elastohydrodynamic deformation due to lubrication forces. Phys Rev Lett 115(24):248302
Saintyves B, Jules T, Salez T, Mahadevan L (2016) Self-sustained lift and low friction via soft lubrication. Proc Natl Acad Sci USA 113(21):5847–5849
Stefan M (1874) Experiments on apparent adhesion. Phil Mag S 4 47(314):465–466
Engmann J, Servais C, Burbidge AS (2005) Squeeze flow theory and applications to rheometry: a review. J Non Newton Fluid Mech 132(1):1–27
Higginson G, Norman R (1974) A model investigation of squeeze-film lubrication in animal joints. Phys Med Biol 19(6):785
Brau F, Lanterbecq D, Zghikh LN, Bels V, Damman P (2016) Dynamics of prey prehension by chameleons through viscous adhesion. Nat Phys 10:931–935
Dhong C, Fréchette J (2015) Coupled effects of applied load and surface structure on the viscous forces during peeling. Soft Matter 11(10):1901–1910
Carlson A, Mahadevan L (2015) Protein mediated membrane adhesion. Phys Fluids 27(5):051901
Wright V, Dowson D (1976) Lubrication and cartilage. J Anat 121(Pt 1):107
Pudenz RH, Shelden CH (1946) The lucite calvarium-a method for direct observation of the brain: Ii. cranial trauma and brain movement. J Neurosurg 3(6):487–505
Venketeswaran A (2019) Computationally effective and efficient methods for interface characterization using cohesive zone model and lubrication theory. Ph. D. Thesis, State University of New York at Buffalo
Kudish II (2013) Elastohydrodynamic lubrication for line and point contacts: asymptotic and numerical approaches. CRC Press, Boca Raton
Trouilloud R, Tony SY, Hosoi A, Lauga E (2008) Soft swimming: exploiting deformable interfaces for low reynolds number locomotion. Phys Rev Lett 101(4):048102
Francis B, Horn R (2001) Apparatus-specific analysis of fluid adhesion measurements. J Appl Phys 89(7):4167–4174
Gervais T, El-Ali J, Günther A, Jensen KF (2006) Flow-induced deformation of shallow microfluidic channels. Lab Chip 6(4):500–507
Dendukuri D, Gu SS, Pregibon DC, Hatton TA, Doyle PS (2007) Stop-flow lithography in a microfluidic device. Lab Chip 7(7):818–828
Cawthorn C, Balmforth N (2010) Contact in a viscous fluid. Part 1. A falling wedge. J Fluid Mech 646:327–338
Constantinescu V (1995) Laminar viscous flow. Springer, New York
Bocquet L, Quéré D, Witten TA, Cugliandolo LF (2017) Soft interfaces: lecture notes of the les houches summer school: volume 98, July 2012. Oxford University Press, Oxford
Hjelmstad KD (2004) Fundamentals of structural mechanics. Springer, New York
Argatov I, Mishuris G (2014) Contact mechanics of articular cartilage layers. Springer International Publishing, Switzerland, pp 1–7
Sneddon IN (1975) Application of integral transforms in the theory of elasticity, vol 33. Springer, New York
Li J, Chou TW (1997) Elastic field of a thin-film/substrate system under an axisymmetric loading. Int J Solids Struct 34(35–36):4463–4478
Wang Y, Tan MR, Frechette J (2017a) Elastic deformation of soft coatings due to lubrication forces. Soft Matter 13(38):6718–6729
Wang Y, Pilkington GA, Dhong C, Frechette J (2017b) Elastic deformation during dynamic force measurements in viscous fluids. Curr Opin Colloid Interface Sci 27:43–49
Leroy S, Charlaix E (2011) Hydrodynamic interactions for the measurement of thin film elastic properties. J Fluid Mech 674:389–407
Winkler E (1867) Die Lehre von der Elasticitaet und Festigkeit mit besondere Ruecksicht auf ihre Anwendung in der Technik, fuer polytechnische Schuhlen, Bauakademien, Ingenieure, Maschienenbauer, Architecten, etc. Vortraege ueber Eisenbahnbau. Vol. 1, Prague: H. Dominicus
Belytschko T, Liu WK, Moran B (2000) Nonlinear finite elements for continua and structures. Wiley, New Jersey
Booker J, Huebner K (1972) Application of finite element methods to lubrication: an engineering approach. J Lubr Technol 94(4):313–323
MATLAB (2014) version 8.3 (R2014a). The Mathworks, Inc, Natick, Massachusetts
Abramowitz M, Stegun IA et al (1972) Handbook of mathematical functions: with formulas, graphs, and mathematical tables, vol 55. Dover Publications, New York
Dassault Systèmes Simulia Corp. (2017) Abaqus Analysis User’s Guide. Providence, Rhode Island, USA
Gradl C (2017) Hydraulic stepper drive, conceptual study, design and experiments. Ph. D Thesis, Johannes Kepler Universität Linz
Gibson I, Rosen D, Stucker B (2010) Additive manufacturing technologies. Springer, New York
Bártolo PJ (2011) Stereolithography: materials, processes and applications. Springer, New York
Tumbleston JR, Shirvanyants D, Ermoshkin N, Janusziewicz R, Johnson AR, Kelly D, Chen K, Pinschmidt R, Rolland JP, Ermoshkin A et al (2015) Continuous liquid interface production of 3d objects. Science 347(6228):1349–1352
Pan Y, Zhou C, Chen Y (2012) A fast mask projection stereolithography process for fabricating digital models in minutes. J Manuf Sci Eng 134(5):051011
Huang YM, Jiang CP (2005) On-line force monitoring of platform ascending rapid prototyping system. J Mater Process Technol 159(2):257–264
Pan Y, He H, Xu J, Feinerman A (2017) Study of separation force in constrained surface projection stereolithography. Rapid Prototyp J. https://doi.org/10.1108/RPJ-12-2015-0188
Ye H, Venketeswaran A, Das S, Zhou C (2017) Investigation of separation force for constrained-surface stereolithography process from mechanics perspective. Rapid Prototyp J 23(4):696–710
Dendukuri D, Panda P, Haghgooie R, Kim JM, Hatton TA, Doyle PS (2008) Modeling of oxygen-inhibited free radical photopolymerization in a pdms microfluidic device. Macromolecules 41(22):8547–8556
Liravi F, Das S, Zhou C (2015) Separation force analysis and prediction based on cohesive element model for constrained-surface stereolithography processes. Comput Aided Des 69:134–142
Barenblatt GI (1962) The mathematical theory of equilibrium cracks in brittle fracture. Advances in applied mechanics. Elsevier, Amsterdam, pp 55–129
Pan Y, Chen Y, Zhou C (2012) Fast recoating methods for the projection-based stereolithography process in micro-and macro-scales. In: Proceeding of solid freeform fabrication symposium, Austin, Texas
Greaves GN, Greer A, Lakes R, Rouxel T (2011) Poisson’s ratio and modern materials. Nat Mater 10(11):823–837
(2018) SLA materials technical data comparison chart. https://www.forecast3d.com/materials/sla
Weekley S, Waters S, Jensen O (2006) Transient elastohydrodynamic drag on a particle moving near a deformable wall. Q J Mech Appl Math 59(2):277–300
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
This work was financially supported by the National Science Foundation award number 1728525.
Electronic supplementary material
Below is the link to the electronic supplementary material.
Appendices
Appendix A: Lubrication theory for liquid flow
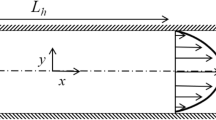
Recall from Sect. 2.1 that the governing equations for liquid flow in a thin gap between moving surfaces, can be suitably approximated using lubrication theory as:
It is assumed that the boundary conditions at the moving solid-liquid interfaces \(\left( \Gamma ^{fI}, \Gamma ^{sI}\right)\) are prescribed using no-slip and no-penetration boundary conditions, as given below:
It is evident from Eq. A.1b that the pressure variable p is independent of z, resulting in \(p\equiv p\left( \mathbf {x},t\right)\). Subsequently, Eq. A.1a can be integrated twice along z. Let \(\eta\) denote a non-dimensional translated coordinate of z, such that \(\eta \in \left[ 0,1\right]\) in the gap. Rewriting Eq. A.1a in terms of \(\eta\):
Next, integrating Eq. A.4 at a fixed \(\mathbf {x}\) and along \(\eta\), an analytical representation of \(\mathbf {v}_{\mathbf {x}}\) can be obtained in terms of \(\nabla _{\mathbf {x}}p\) and the no-slip boundary velocities given in Eq. A.2:
However, both p and \(v_z\) are unknown and need to be determined from the continuity equation Eq. A.1c. A common trick employed in lubrication theory is to use the averaged form of Eq. A.1c along gap thickness:
where the integral on R.H.S. of Eq. A.6 can be expanded using Leibniz integral rule as
and the last two terms in Eq. A.6 are given by the no-penetration b.c. given in Eq. A.3:
Substituting Eqs. A.5, A.7–A.8 in Eq. A.6 and using \(h_l=h_s-h_{\scriptscriptstyle {f}}\), the governing equation for the liquid pressure is given by:
Appendix B: Asymptotic solution of film displacements
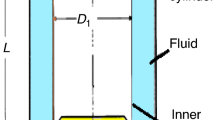
Consider a thin isotropic elastic film (of uniform thickness \(h^{\scriptscriptstyle {0}}\)) which is bonded to a fixed rigid substrate and subjected to a normal pressure loading at its surface. An analytical solution for the elastic deformations of the film, has been obtained in literature [32] using perturbation theory. The perturbation analysis is presented here for the sake of completeness and further details can be found in [32]. Henceforth, the superscript f will be omitted from all the parameters and variables pertaining to the film for simplifying the notations in the forthcoming equations. The coordinate system \(\left( x_1,\, x_2,\, z\right)\) introduced earlier, is adopted, with origin O located at the base of the film as depicted in Fig. 1b, wherein \(\mathbf {x}\equiv \left( x_1,x_2\right)\) denotes the in-plane coordinates and z denotes the out-of-plane coordinate. Let \(q\left( \mathbf {x}\right)\) denote the normal loading on the film’s surface \((z=h^{\scriptscriptstyle {0}})\). It is assumed that \(q\left( \mathbf {x}\right)\) is an arbitrary smooth function defined on an arbitrary closed domain \(\mathcal {S}\) and diminishes at the boundary \(\partial \mathcal {S}\) such that \(q\left( \mathbf {x}\right) =0, \, \forall \, \mathbf {x}\in \partial \mathcal {S}.\) Let R denote the characteristic in-plane length of \(\mathcal {S}\) such that \(R \gg h^{\scriptscriptstyle {0}}\). Elastic deformations of the film \((\mathbf {u})\) are governed by the boundary value problem:
where \(\varvec{\sigma }\) denotes the elastic stress tensor given by Eq. 13, and \(\left( \lambda ,G\right)\) denote the Lamé parameters which can be expressed in terms of the Youngs modulus (E) and Poisson’s ratio \((\nu )\) as \(\lambda = \tfrac{E \nu }{\left( 1+\nu \right) \left( 1-2\nu \right) }\) and \(G=\tfrac{E}{2\left( 1+\nu \right) }\). The stress equilibrium equation Eq. B.10, can also be expressed in terms of the displacement variables \(\mathbf {u}=\left[ u_1 \equiv u_{x_1}, u_2\equiv u_{x_2}, u_{3}\equiv u_z\right]\) as:
Non-dimensionalizing the coordinates and derivatives using:
it can be shown that Eqs. B.11–B.12 result in:
where \(\epsilon =\frac{h^{\scriptscriptstyle {0}}}{R}\) and \(a=\left( \lambda + G \right) =\tfrac{E}{2\left( 1+\nu \right) \left( 1-2\nu \right) }\). Clearly \(\epsilon\) is a small non-dimensional parameter since \(R \gg h^{\scriptscriptstyle {0}}\). The unknown displacement field \(\mathbf {u}\) is represented using an asymptotic expansion (power series in terms of \(\epsilon\)):
where \(u_j^{(k)}\left( \overline{\mathbf {x}},\overline{z}\right)\) are unknown coefficients. These coefficients can be determined using perturbation analysis [32]. The solution procedure is briefly explained using a simple equation. Consider the fixed b.c. at \(z=0\), \(u_1\left( \mathbf {x},z=0\right) =0.\) Scaling the variables using Eq. B.13, \(u_1\left( \mathbf {x},z=0\right) =u_1\left( \overline{\mathbf {x}},\overline{z}=0\right)\). Next, substituting the asymptotic expansion into the equation it is evident that \(\sum _{k=0}^{\infty } \epsilon ^k u_{1}^{(k)}\left( \overline{\mathbf {x}},\overline{z}\right) =0\). This equation has to be satisfied for any arbitrary small value of \(\epsilon\), which implies that each of the coefficients have to be zero. Subsequently, the fixed b.c. at \(\overline{z}=0\) implies
It should be noted that the fixed b.c. on \(u_1\) translates to a b.c. on the individual coefficients. This procedure is repeated for the traction b.c. given in Eq. B.10 and each of the governing equations (Eqs. B.11–B.12). Non-dimensionalizing the traction b.c.s at \(\overline{z}=1\):
Substituting Eqs. B.16 in Eqs. B.18 and equating the coefficients of the resulting power series to zero:
Substituting Eqs. B.16 in Eq. B.19:
A system of coupled partial differential equations (pde) governing the evolution of the coefficients can be obtained by substituting Eqs. B.16 in Eqs. B.14 - B.15. Using Eqs. B.16 in Eqs. B.14 :
and substituting Eqs. B.16 in Eq. B.15:
where \(b=\left( \lambda + 2G \right) =\tfrac{E\left( 1-\nu \right) }{\left( 1+\nu \right) \left( 1-2\nu \right) }\). The system of equations given by Eqs. B.25–B.30 and the set of boundary conditions in Eqs. B.17, B.20–B.24 can be solved systematically to obtain the coefficients. Solving Eq. B.25 for b.c.’s given by Eqs. B.17 and B.20,
Solving Eq. B.28 for the b.c.’s given by Eqs. B.17 and B.22
Substituting Eq. B.32 in Eq. B.26 and Eq. B.21 for \(k=1\), and using the b.c.’s given by Eq. B.23 and Eq. B.17:
Using Eqs. B.31, B.23, B.29, it can be seen that \(u_3^{(1)}\left( \overline{\mathbf {x}},\overline{z}\right)\) is governed by
Using Eqs. B.31–B.34 in Eq. B.27 (for \(k=2\)) and Eq. B.21 (for \(k=2\)), \(u_{i}^{(2)}\) for \(i=1, \, 2\) can be obtained as:
Following this procedure, it can be shown that
Hence, the displacement field can be obtained by by substituting the individual components Eqs. B.31–B.37 in Eq. B.16 and rescaling the coordinates and derivatives. Finally, it can be shown that a third order asymptotic expansion of the displacement field is given by:
Rights and permissions
About this article

Cite this article
Venketeswaran, A., Das, S. Effective and efficient characterization of lubrication flow over soft coatings. Meccanica 55, 1193–1213 (2020). https://doi.org/10.1007/s11012-020-01157-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11012-020-01157-7