
Abstract
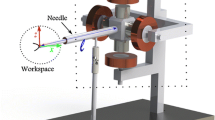
This paper presents the design, modeling, integration, and application of 3D printed high power hexapole magnetic tweezers for 3D micromanipulation applications. Six sharp-tipped magnetic poles were configured with electromagnetic coils and mounted on 3D printed magnetic yokes to form a tilted Cartesian coordinate system for actuation. A closed loop control algorithm was developed to automatically manipulate external power supplies connected to the magnetic tweezers, by using 3D positional information obtained from real-time image processing techniques. When compared against other designs of magnetic tweezers, our system has a larger working space and can generate higher magnetic field strengths. This allows for more diverse applications regarding small scale manipulation, including cell manipulation and cell therapy. Experiments and analytics explained in this paper demonstrate the closed-loop manipulation of micro-swimmers can provide a magnetic force as high as 800 pN while maintaining a positional error below 4 µm in 3D and 1.6 µm in 2D. Using the desired location as the control input, the microswimmers investigated were able to achieve arbitrary 2D and 3D trajectories. We also show that the implemented hexapole magnetic tweezers have adequate power to control microswimmers in Newtonian fluid environments. The system will later be optimized and deployed to control microswimmers in non-Newtonian fluid environments.
Similar content being viewed by others


References
Cheang U K, Lee K, Julius A A, Kim M J. Multiple-robot drug delivery strategy through coordinated teams of microswimmers. Applied Physics Letters, 2014, 105, 083705.
Chiou C-H, Huang Y-Y, Chiang M-H, Lee H-H, Lee G-B. New magnetic tweezers for investigation of the mechanical properties of single DNA molecules. Nanotechnology, 2006, 17, 1217–1224.
Cheang U K, Kim H, Milutinović D, Choi J, Rogowski L, Kim M J. Feedback control of three-bead achiral robotic micro swimmers. 12th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), Goyang, South Korea, 2015, 518–523.
Zhang X, Kim H, Kim M J. Design, implementation, and analysis of a 3-D magnetic tweezer system with high magnetic field gradien. IEEE Transactions on Instrumentation and Measurement, 2018, 68, 680–687.
Cheang U K, Meshkati F, Kim D, Kim M J, Fu H C. Minimal geometric requirements for micropropulsion via magnetic rotatio. Physical Review E, 2014, 90, 033007.
Zhang X, Kim H, Rogowski L W, Sheckman S, Kim M J. Novel 3D magnetic tweezer system for microswimmer manipulations. 14th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), Jeju, South Korea, 2017, 382–387.
Neuman K C, Nagy A. Single-molecule force spectroscopy: Optical tweezers, magnetic tweezers and atomic force microscopy. Nature Methods, 2008, 5, 491–505.
Tottori S, Zhang L, Qiu F, Krawczyk K K, Franco-Obregón A, Nelson B J. Magnetic helical micromachines: Fabrication, controlled swimming, and cargo transport. Advanced Materials, 2012, 24, 811–816.
Cheang U K, Roy D, Lee J H, Kim M J. Fabrication and magnetic control of bacteria-inspired robotic microswimmers. Applied Physics Letters, 2010, 97, 213704.
Robert D, Fayol D, Le Visage C, Frasca G, Brule S, Menager, C, Gazeau F, Letourneur D, Wilhelm C. Magnetic micro-manipulations to probe the local physical properties of porous scaffolds and to confine stem cells. Biomaterials, 2010, 31, 1586–1595.
Yan X H, Zhou Q, Yu J F, Xu T T, Deng Y, Tang T, Feng Q, Bian L M, Zhang Y, Ferreira A, Zhang L. Magnetite nano-structured porous hollow helical microswimmers for targeted delivery. Advanced Functional Materials, 2015, 25, 5333–5342.
Zhang Z, Menq C-H. Design and modeling of a 3-D magnetic actuator for magnetic microbead manipulation. IEEE/ASME Transactions on Mechatronics, 2011, 16, 421–430.
Haber C, Wirtz D. Magnetic tweezers for DNA micromanipulatio. Review of Scientific Instruments, 2000, 71, 4561–4570.
Hosu B G, Jakab K, Bánki P, Tóth F I, Forgacs G. Magnetic tweezers for intracellular applications. Review of Scientific Instruments, 2003, 74, 4158–5163.
Chen L, Offenhäusser A, Krause H-J. Magnetic tweezers with high permeability electromagnets for fast actuation of magnetic beads. Review of Scientific Instruments, 2015, 86, 044701.
Gosse C, Croquette V. Magnetic tweezers: Micromanipulation and force measurement at the molecular level. Biophysical Journal, 2002, 82, 3314–3329.
Chang L Q, Howdyshell M, Liao W-C, Chiang C-L, Gallego-Perez D, Yang Z G, Lu W, Byrd J C, Muthusamy N, Lee L J, Sooryakumar R. Magnetic tweezers-based 3D micro-channel electroporation for high-throughput gene transfection in living cells. Small, 2015, 11, 1818–1828.
Amblard F, Yurke B, Pargellis A, Leibler S. A magnetic manipulator for studying local rheology and micromechanical properties of biological systems. Review of Scientific Instruments, 1996, 67, 818–827.
Niu F Z, Ma W C, Li X P, Chu H K, Yang J, Ji H B, Sun D. Modeling and development of a magnetically actuated system for micro-particle manipulation. 14th IEEE International Conference on Nanotechnology, Toronto, ON, Canada, 2014, 127–130.
Purcell E M. Life at low Reynolds number. American Journal of Physics, 1977, 45, 3–11.
Bausch A R, Moller W, Sackmann E. Measurement of local viscoelasticity and forces in living cells by magnetic tweezers. Biophysical Journal, 1999, 76, 573–579.
Zhang Z, Huang K, Menq C-H. Design, implementation, and force modeling of quadrupole magnetic tweezers. IEEE/ASME Transactions on Mechatronics, 2010, 15, 704–713.
Wu M, Roberts J W, Kim S, Koch D L, DeLisa M P. Collective bacterial dynamics revealed using a three-dimensional population-scale defocused particle tracking technique. Applied and Environmental Microbiology, 2006, 72, 4987–4994.
Wu M, Roberts J W, Buckley M. Three-dimensional fluorescent particle tracking at micron-scale using a single camera. Experiments in Fluids, 2005, 38, 461–465.
De Vries A H, Krenn B E, van Driel R, Kanger J S. Micro magnetic tweezers for nanomanipulation inside live cells. Biophysical Journal, 2005, 88, 2137–2144.
Acknowledgments
This work was supported by the National Science Foundation (CMMI 1737682). Special acknowledgement should be given to Professor U Kei Cheang at Southern University of Science and Technology for his strong support and valuable instructions during system setup.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Zhang, X., Rogowski, L.W. & Kim, M.J. Closed-loop Control Using High Power Hexapole Magnetic Tweezers for 3D Micromanipulation. J Bionic Eng 17, 113–122 (2020). https://doi.org/10.1007/s42235-020-0009-4
Published:
Issue Date:
DOI: https://doi.org/10.1007/s42235-020-0009-4