Driving Waveform Design of Electrowetting Displays Based on an Exponential Function for a Stable Grayscale and a Short Driving Time

 ,
, 
Abstract
:1. Introduction
2. Driving Principle of the EWD
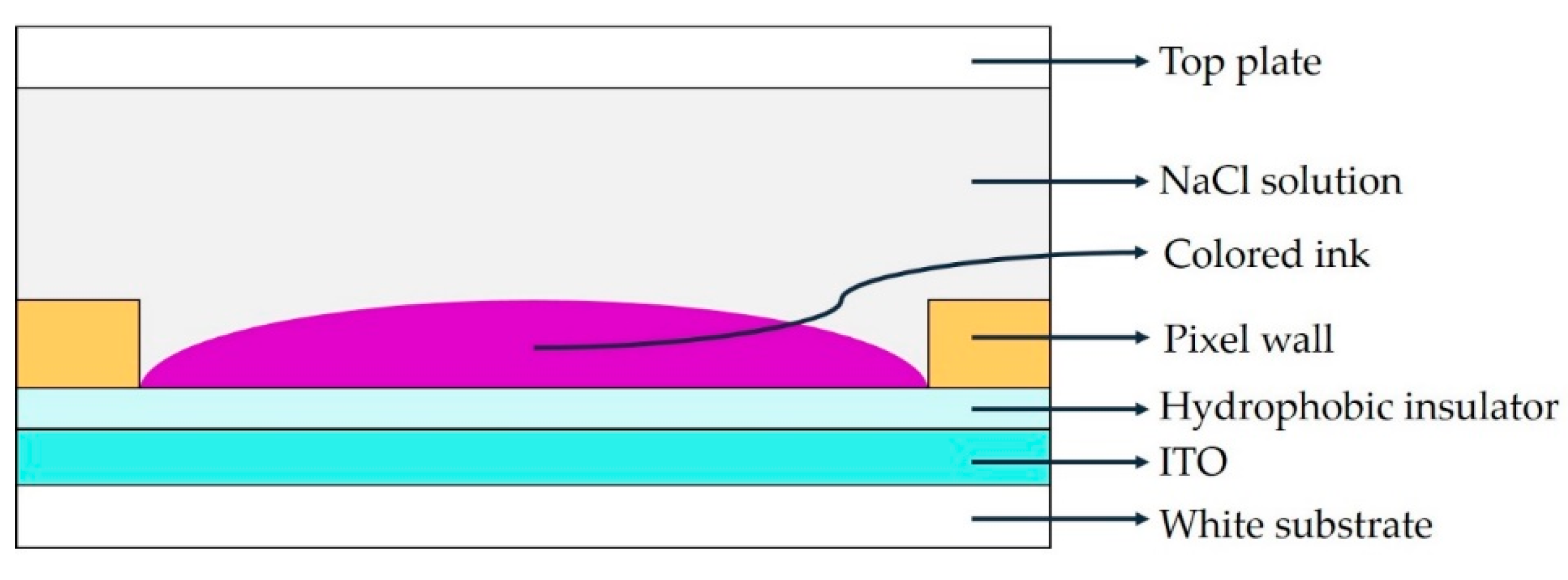
2.1. Model of the EWD
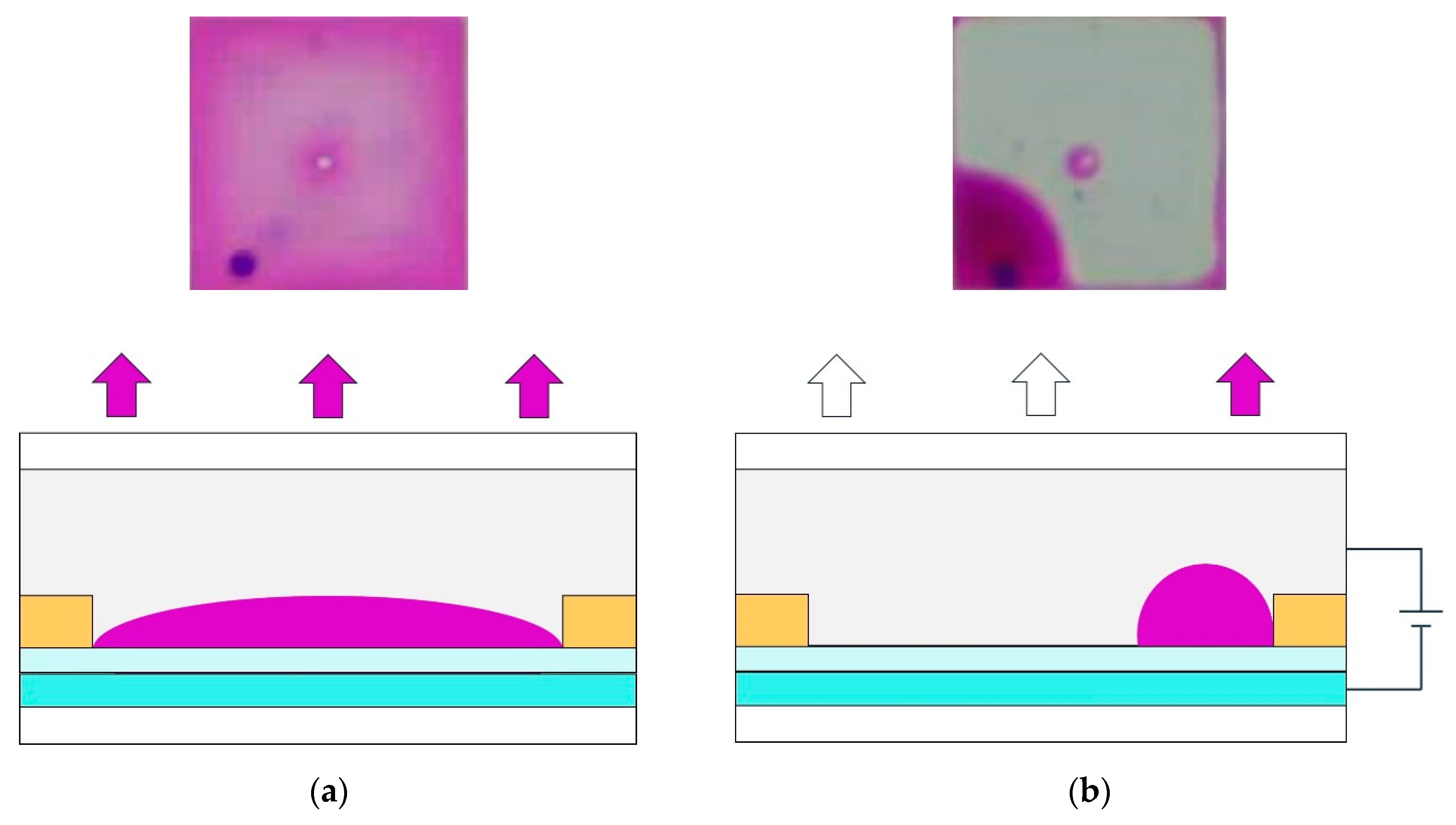
2.2. Design Principle of an Exponential-Function-Driving Waveform
3. Design of the Exponential-Function-Driving Waveform
3.1. Maximum Voltage of the Driving Waveform
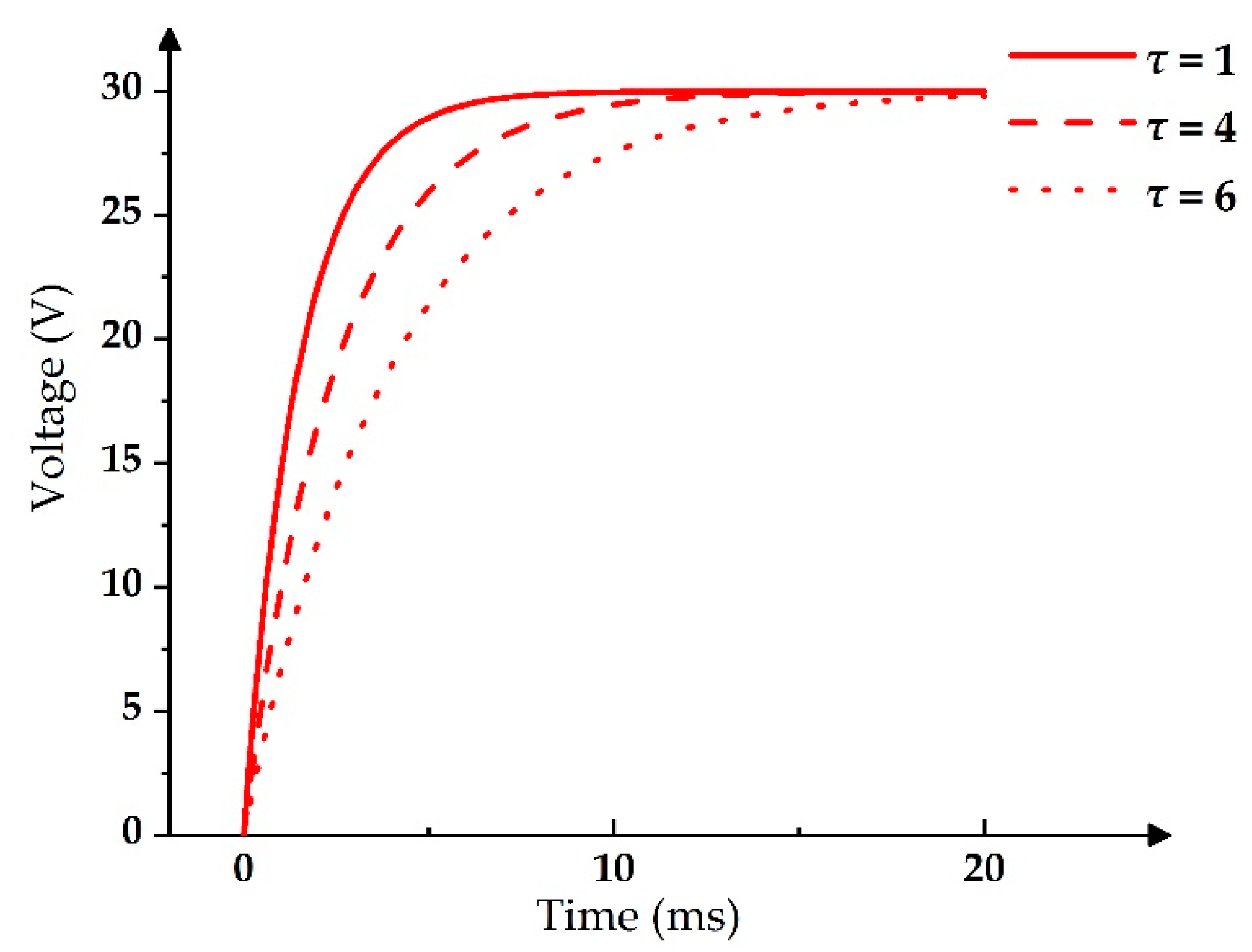
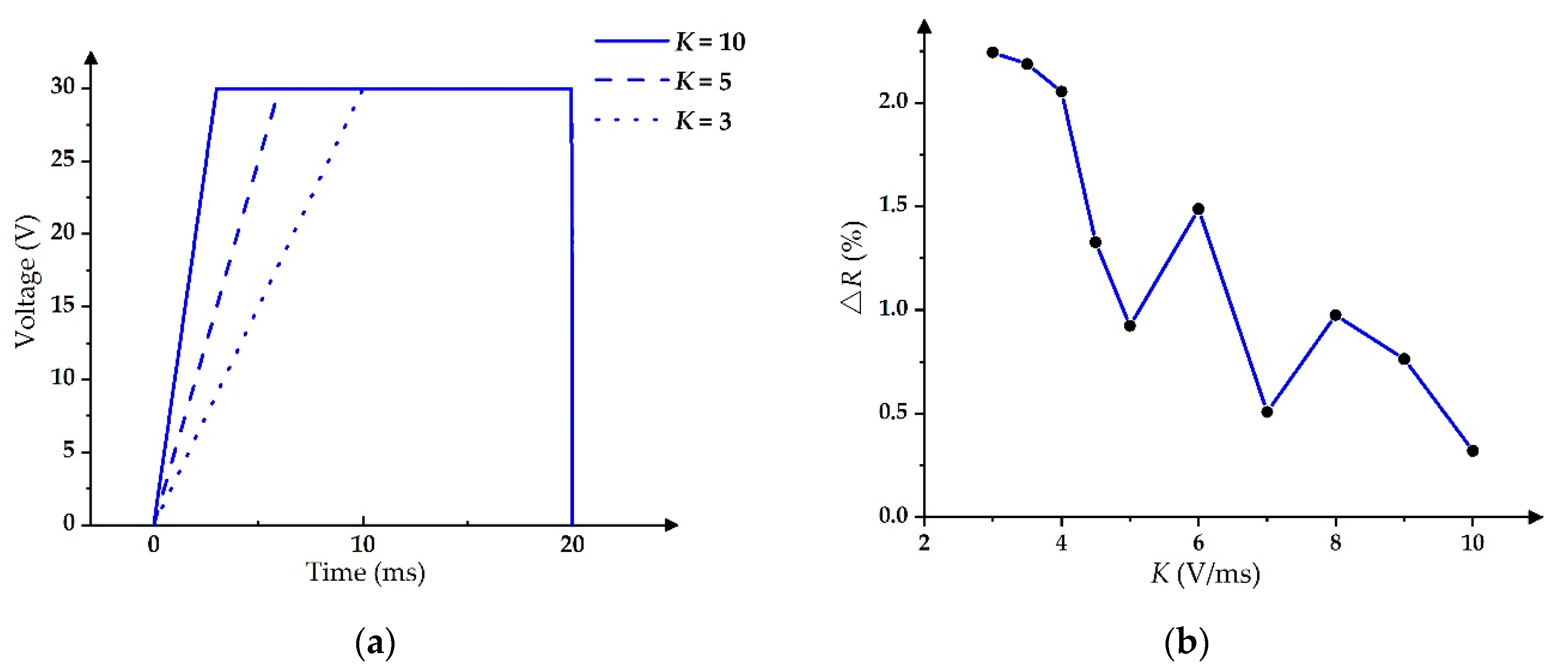
3.2. Time Constant of the Exponential Function
4. Experimental Results and Discussion
4.1. Testing System
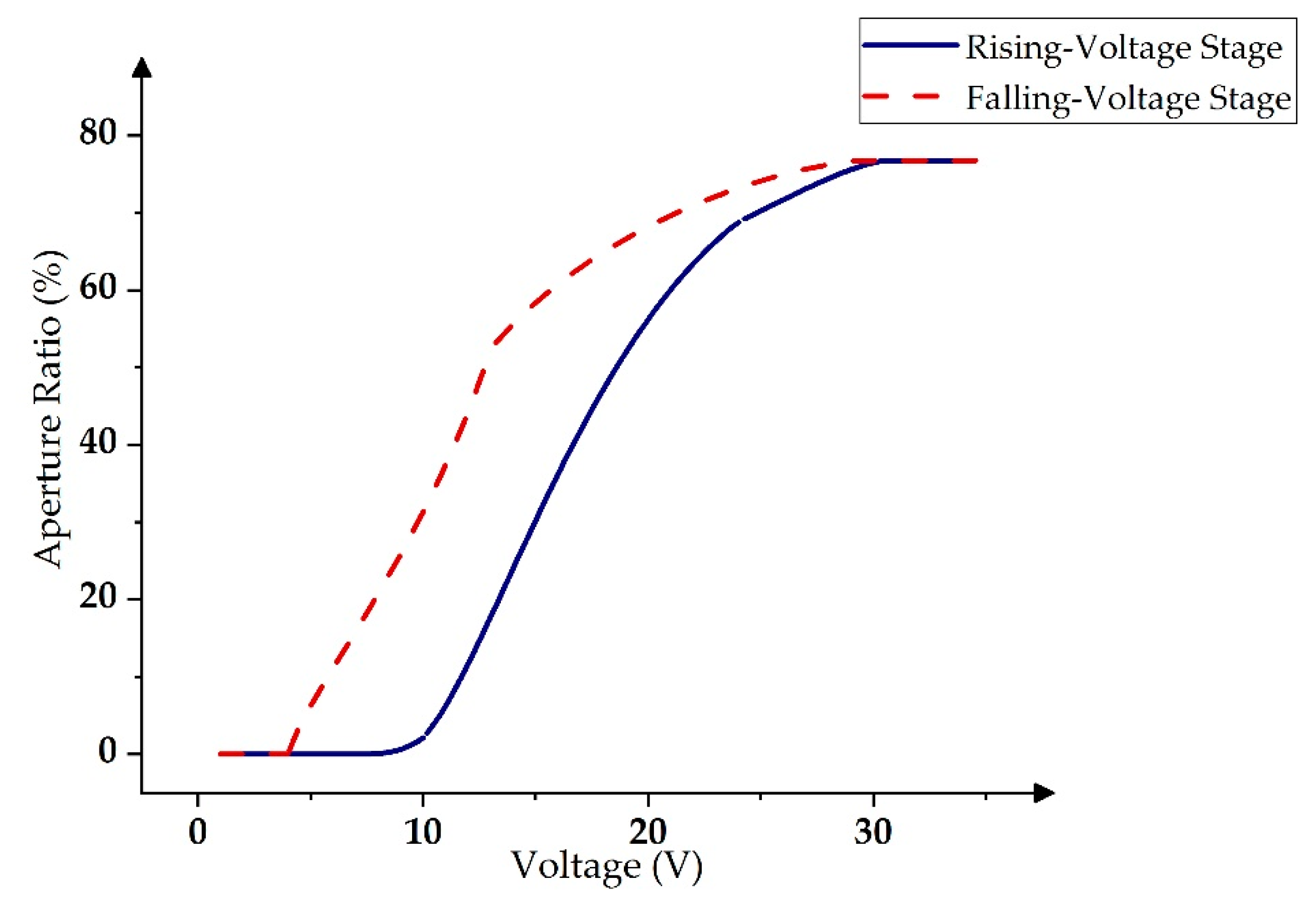
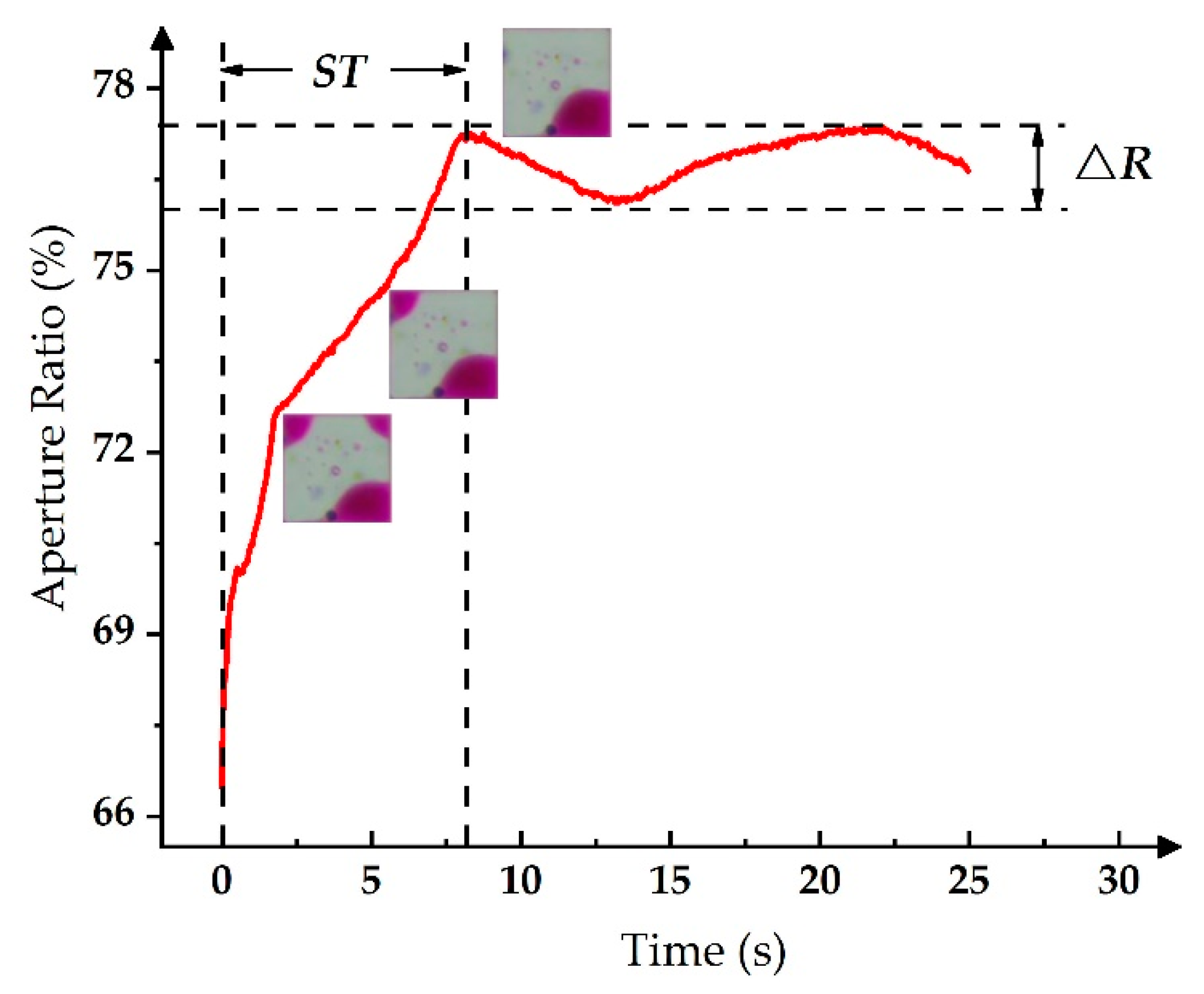
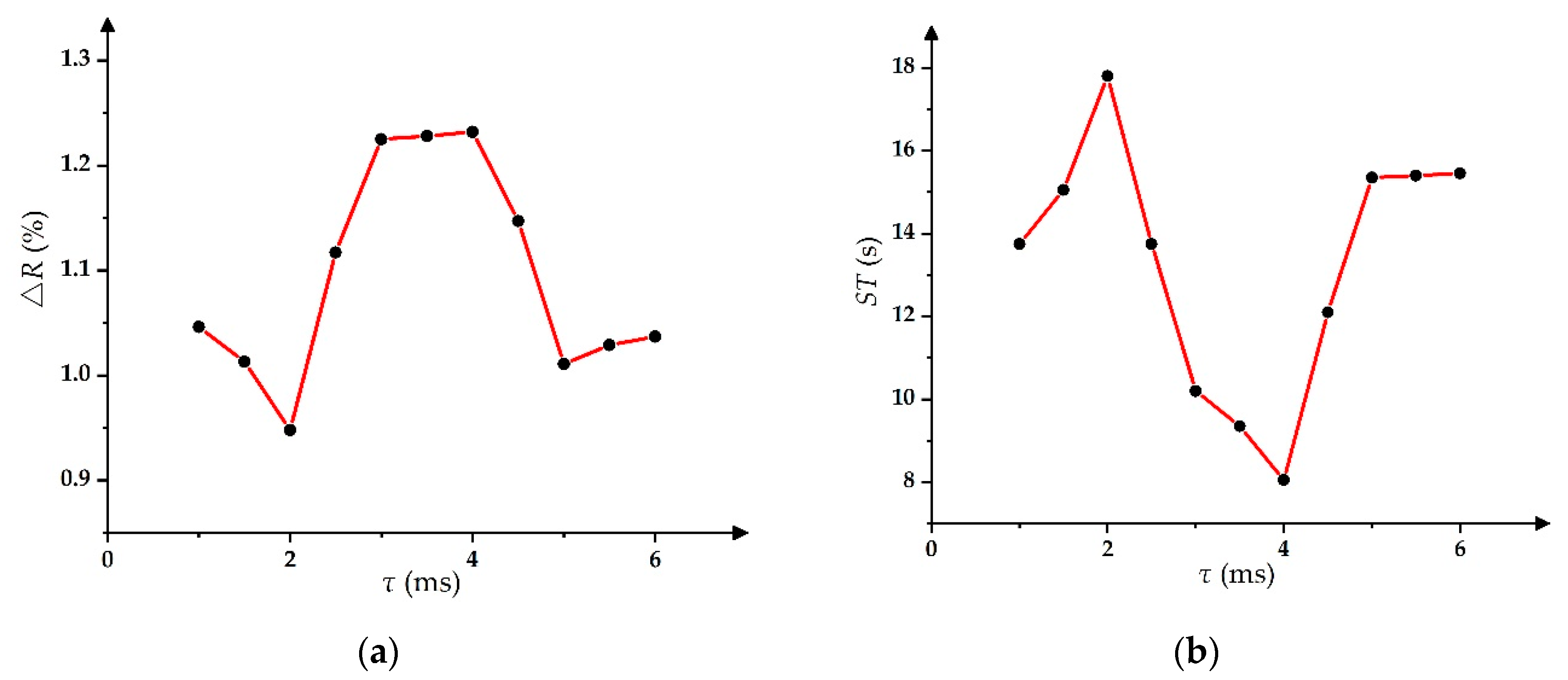
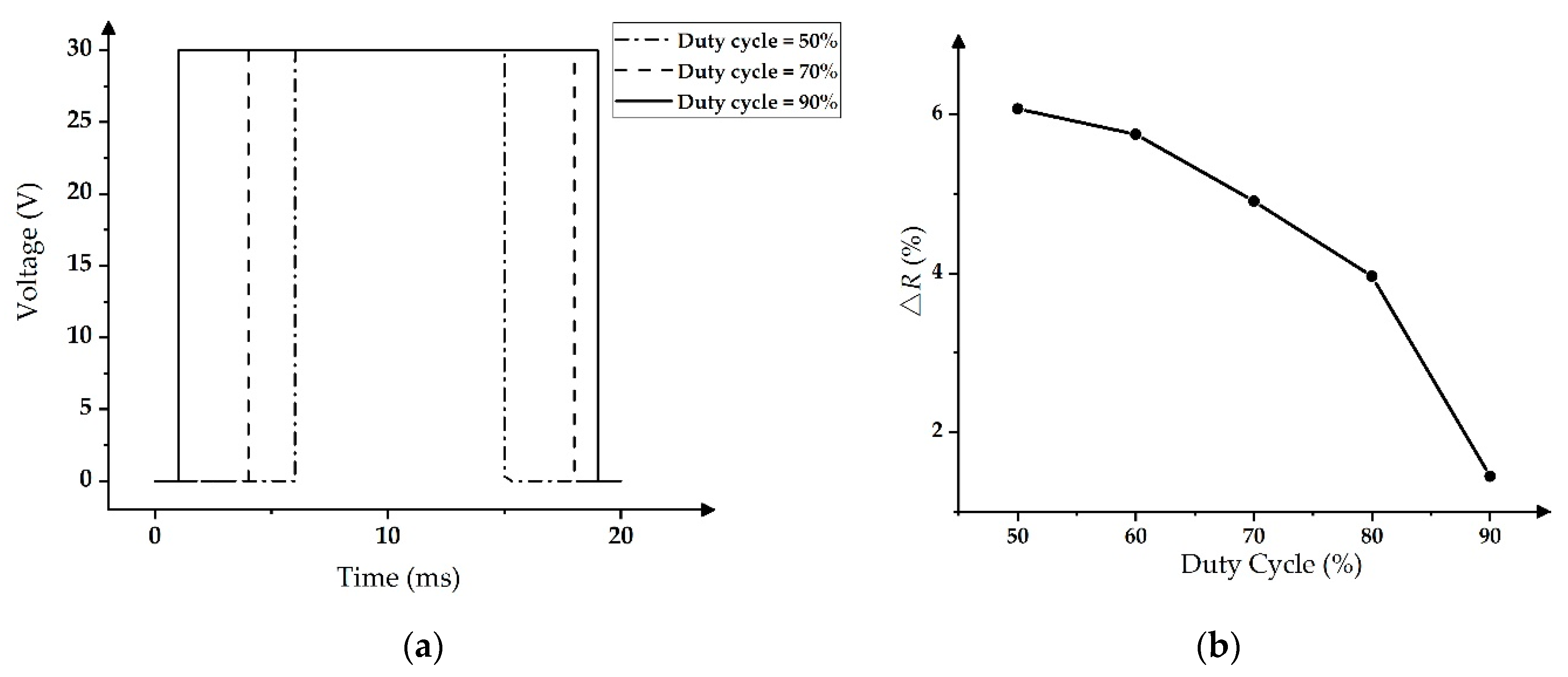
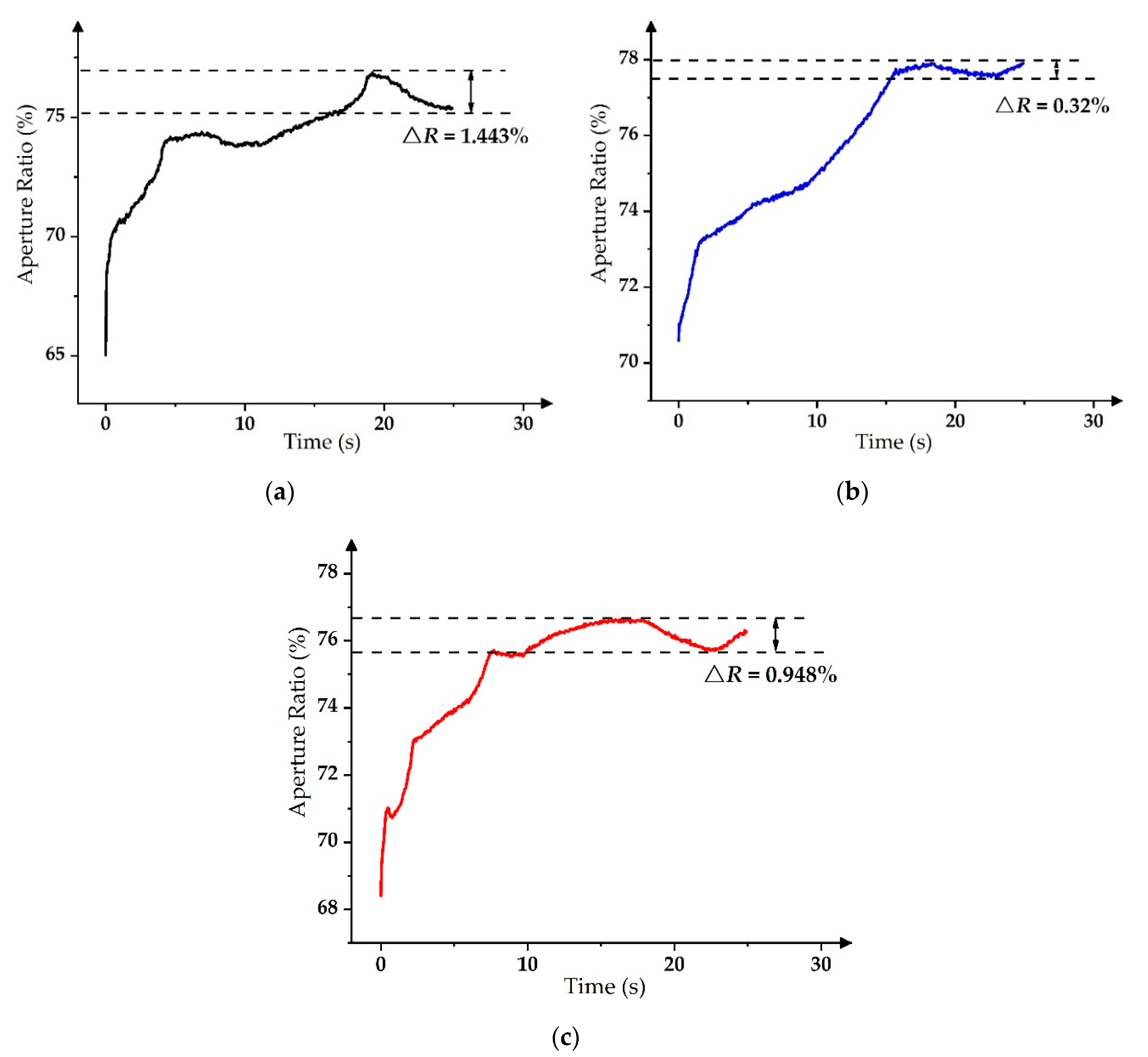
4.2. Oscillation Range of the Aperture Ratio
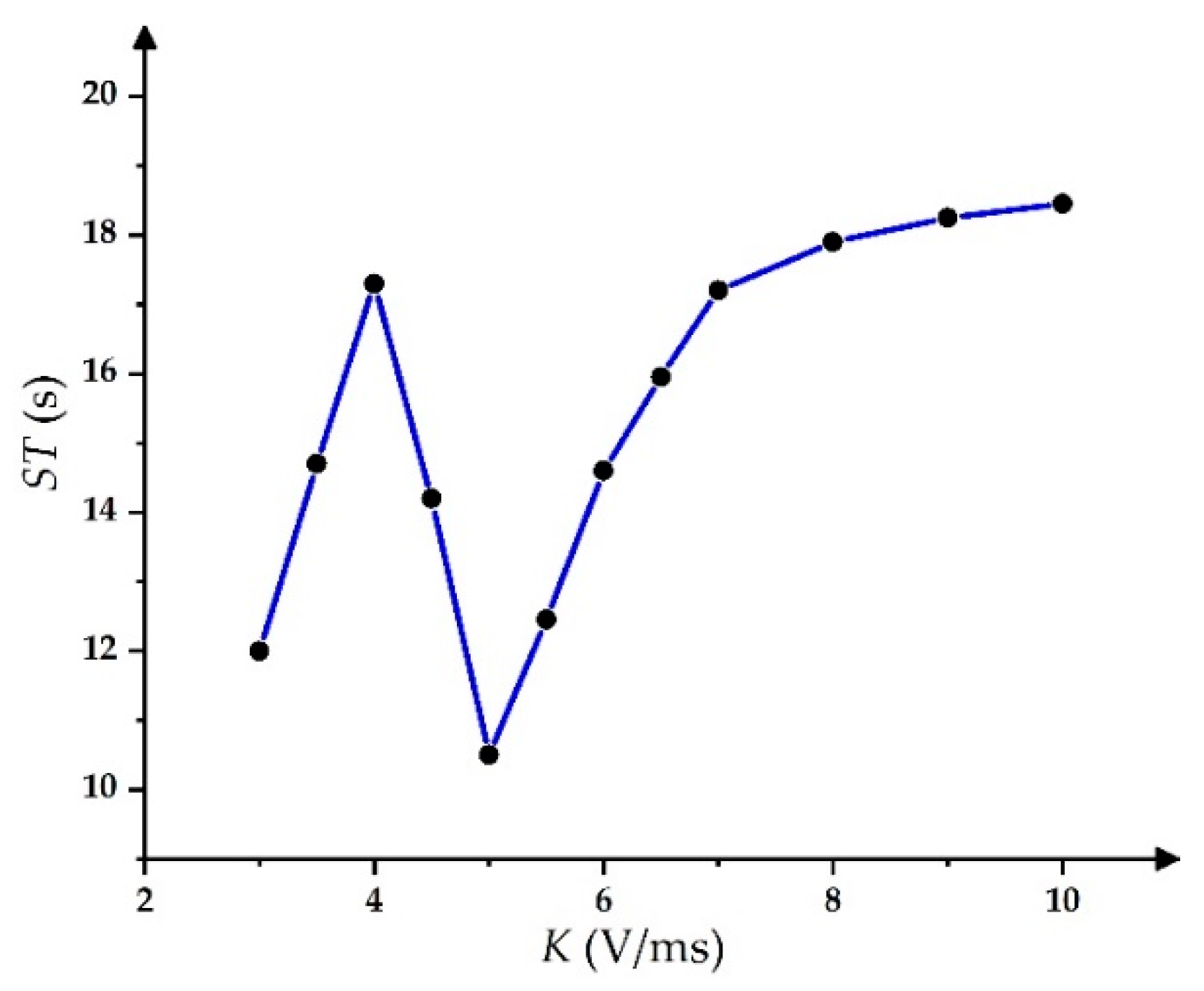
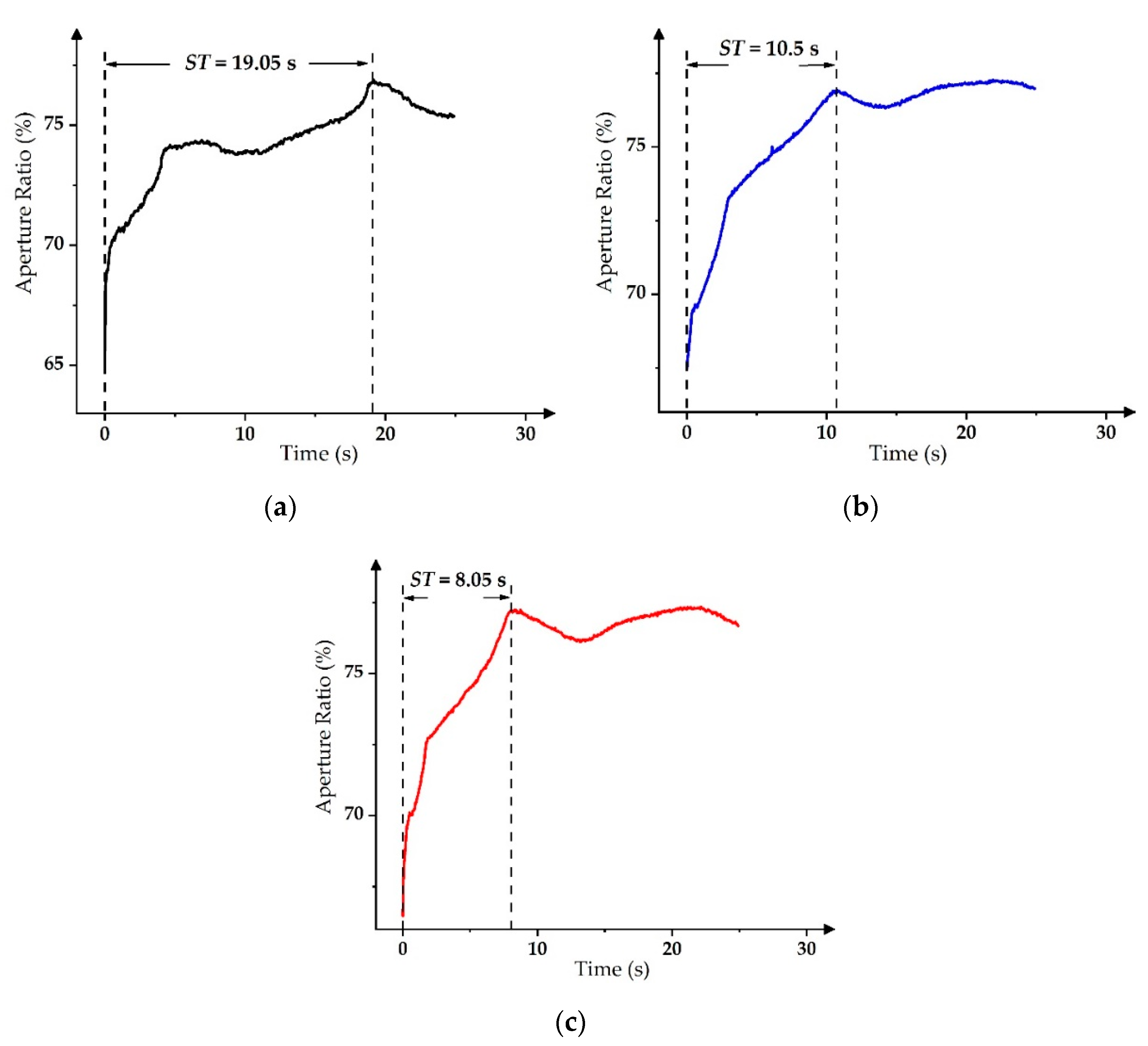
4.3. Driving Time of a Stable Grayscale
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Zhang, N.; Gu, W.; Xu, F.Q.; Yang, X.F. Electronic Paper Display Technology and its Application Development. Adv. Mater. Res. 2014, 926, 2333–2336. [Google Scholar] [CrossRef]
- Riahi, M.; Brakke, K.A.; Alizadeh, E.; Shahroosvand, H. Fabrication and characterization of an electrowetting display based on the wetting–dewetting in a cubic structure. Optik 2016, 127, 2703–2707. [Google Scholar] [CrossRef]
- Hayes, R.A.; Feenstra, B.J. Video-speed electronic paper based on electrowetting. Nature 2003, 425, 383–385. [Google Scholar] [CrossRef] [PubMed]
- Mugele, F.; Baret, J.-C. Electrowetting: From basics to applications. J. Phys. Condens. Matter 2005, 17, R705–R774. [Google Scholar] [CrossRef]
- Luo, Z.; Zhao, W.; Cao, Y.; Lin, W.; Zhou, G. A high-resolution and intelligent dead pixel detection scheme for an electrowetting display screen. Opt. Rev. 2017, 25, 18–26. [Google Scholar] [CrossRef]
- Zhou, M.; Zhao, Q.; Tang, B.; Groenewold, J.; Hayes, R.; Zhou, G. Simplified dynamical model for optical response of electrofluidic displays. Displays 2017, 49, 26–34. [Google Scholar] [CrossRef]
- Fan, M.; Zhou, R.; Jiang, H.; Zhou, G. Effect of liquid conductivity on optical and electric performances of the electrowetting display system with a thick dielectric layer. Results Phys. 2020, 16, 102904. [Google Scholar] [CrossRef]
- Hsieh, W.-L.; Lin, C.-H.; Lo, K.-L.; Lee, K.-C.; Cheng, W.-Y.; Chen, K.-C. 3D electrohydrodynamic simulation of electrowetting displays. J. Micromech. Microeng. 2014, 24, 125024. [Google Scholar] [CrossRef]
- Chen, Y.-C.; Chiu, Y.-H.; Lee, W.-Y.; Liang, C.-C. 56.3: A Charge Trapping Suppression Method for Quick Response Electrowetting Displays. SID Symp. Dig. Tech. Pap. 2010, 41, 842–845. [Google Scholar] [CrossRef]
- Wu, H.; Dey, R.; Siretanu, I.; Ende, D.V.D.; Shui, L.; Zhou, G.; Mugele, F. Electrically Controlled Localized Charge Trapping at Amorphous Fluoropolymer-Electrolyte Interfaces. Small 2019, 16, e1905726. [Google Scholar] [CrossRef]
- Gao, J.; Mendel, N.; Dey, R.; Baratian, D.; Mugele, F. Contact angle hysteresis and oil film lubrication in electrowetting with two immiscible liquids. Appl. Phys. Lett. 2018, 112, 203703. [Google Scholar] [CrossRef] [Green Version]
- Giraldo, A.; Massard, R.; Mans, J.; Derckx, E.; Aubert, J.; Mennen, J. 10.3: Ultra low-power Electrowetting-based Displays Using Dynamic Frame Rate Driving. SID Symp. Dig. Tech. Pap. 2011, 42, 114–117. [Google Scholar] [CrossRef]
- Yi, Z.; Liu, L.; Wang, L.; Li, W.; Shui, L.; Zhou, G. A Driving System for Fast and Precise Gray-Scale Response Based on Amplitude-Frequency Mixed Modulation in TFT Electrowetting Displays. Micromachines 2019, 10, 732. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yi, Z.; Shui, L.; Wang, L.; Jin, M.; Hayes, R.; Zhou, G. A novel driver for active matrix electrowetting displays. Displays 2015, 37, 86–93. [Google Scholar] [CrossRef]
- Yang, G.; Liu, L.; Zheng, Z.; Henzen, A.; Xi, K.; Bai, P.; Zhou, G. A portable driving system for high-resolution active matrix electrowetting display based on FPGA. J. Soc. Inf. Disp. 2019, 28, 287–296. [Google Scholar] [CrossRef]
- Zhao, Q.; Tang, B.; Dong, B.; Li, H.; Zhou, R.; Guo, Y.; Dou, Y.; Deng, Y.; Groenewold, J.; Henzen, A.V.; et al. Electrowetting on dielectric: experimental and model study of oil conductivity on rupture voltage. J. Phys. D: Appl. Phys. 2018, 51, 195102. [Google Scholar] [CrossRef]
- Zhang, X.-M.; Bai, P.-F.; Hayes, R.A.; Shui, L.-L.; Jin, M.-L.; Tang, B.; Zhou, G.-F. Novel Driving Methods for Manipulating Oil Motion in Electrofluidic Display Pixels. J. Disp. Technol. 2015, 12, 200–205. [Google Scholar] [CrossRef]
- Supekar, O.D.; Zohrabi, M.; Gopinath, J.T.; Bright, V.M. Enhanced Response Time of Electrowetting Lenses with Shaped Input Voltage Functions. Langmuir 2017, 33, 4863–4869. [Google Scholar] [CrossRef]
- Wu, H.; Hayes, R.; Li, F.; Henzen, A.; Shui, L.; Zhou, G. Influence of fluoropolymer surface wettability on electrowetting display performance. Displays 2018, 53, 47–53. [Google Scholar] [CrossRef]
- Choi, S.; Lee, J. Open-structure electrowetting display with capacitive sensing feedback system. In Proceedings of the 2015 28th IEEE International Conference on Micro Electro Mechanical Systems (MEMS), Estoril, Portugal, 18–22 January 2015; pp. 956–959. [Google Scholar] [CrossRef]
- Zhou, R.; Fu, S.; Jiang, H.; Li, X.; Zhou, G. Thermal accelerated aging study of water/fluoropolymer/ITO contact in electrowetting display systems. Results Phys. 2019, 15, 102737. [Google Scholar] [CrossRef]
- Dou, Y.; Wang, B.; Jin, M.; Yu, Y.; Zhou, G.; Shui, L. A review on self-assembly in microfluidic devices. J. Micromech. Microeng. 2017, 27, 113002. [Google Scholar] [CrossRef]
- Dou, Y.; Tang, B.; Groenewold, J.; Li, F.; Yue, Q.; Zhou, R.; Li, H.; Shui, L.; Henzen, A.; Zhou, G. Oil Motion Control by an Extra Pinning Structure in Electro-Fluidic Display. Sensors 2018, 18, 1114. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wu, H.; Shui, L.; Li, F.; Hayes, R.; Henzen, A.; Mugele, F.; Zhou, G. Large-Area High-Contrast Hydrophobic/Hydrophilic Patterned Surface for Robust Electrowetting Devices. ACS Appl. Nano Mater. 2019, 2, 1018–1026. [Google Scholar] [CrossRef]
- Chen, Z.; Lin, S.; Lin, Z.; Liao, Q.; Li, T.; Tang, B. Design of Video Display Driving System for Low-power Electrowetting Display. Acta Photonica Sin. 2020, 49, 222002. [Google Scholar] [CrossRef]
- Chiang, H.-C.; Tsai, Y.-H.; Yan, Y.-J.; Huang, T.-W.; Mang, O.-Y. Oil defect detection of electrowetting display. Opt. Eng. Appl. 2015, 9575, 957514. [Google Scholar] [CrossRef]
- Lin, S.; Zeng, S.; Qian, M.; Lin, Z.; Guo, T.; Tang, B. Improvement of display performance of electrowetting displays by optimized waveforms and error diffusion. J. Soc. Inf. Disp. 2019, 27, 619–629. [Google Scholar] [CrossRef]
- Dou, Y.; Chen, L.; Li, H.; Tang, B.; Henzen, A.; Zhou, G. Photolithography Fabricated Spacer Arrays Offering Mechanical Strengthening and Oil Motion Control in Electrowetting Displays. Sensors 2020, 20, 494. [Google Scholar] [CrossRef] [Green Version]
- Xie, Y.; Sun, M.; Jin, M.; Zhou, G.; Shui, L. Two-phase microfluidic flow modeling in an electrowetting display microwell. Eur. Phys. J. E 2016, 39, 16. [Google Scholar] [CrossRef]
- Luo, Z.J.; Zhang, W.N.; Liu, L.W.; Xie, S.; Zhou, G. Portable multi-gray scale video playing scheme for high-performance electrowetting displays. J. Soc. Inf. Disp. 2016, 24, 345–354. [Google Scholar] [CrossRef]
- Yi, Z.; Feng, W.; Wang, L.; Liu, L.; Lin, Y.; He, W.; Shui, L.; Zhang, W.; Zhang, Z.; Zhou, G. Aperture Ratio Improvement by Optimizing the Voltage Slope and Reverse Pulse in the Driving Waveform for Electrowetting Displays. Micromachines 2019, 10, 862. [Google Scholar] [CrossRef] [Green Version]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Computer | Waveform Generator | High Voltage Amplifier | Microscope | Industrial Camera |
|---|---|---|---|---|---|
| Manufacturer | Lenovo | Tektronix | Agitek | Cossim | Koppace |
| Model | M425 | AFG-3052C | ATA-2022H | SZ760T2LED | KP-AF200 |
| Panel Size (cm) | Ink Color | Ink Thickness (µm) | Resolution | Pixel Size (μm2) | Pixel Wall Height (µm) | Pixel Wall Size (μm2) | Hydrophobic Layer Thickness (µm) |
|---|---|---|---|---|---|---|---|
| 3.5 × 3.5 | Purple | 5 | 50 × 50 | 400 × 400 | 6 | 15 × 15 | 1 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yi, Z.; Huang, Z.; Lai, S.; He, W.; Wang, L.; Chi, F.; Zhang, C.; Shui, L.; Zhou, G. Driving Waveform Design of Electrowetting Displays Based on an Exponential Function for a Stable Grayscale and a Short Driving Time. Micromachines 2020, 11, 313. https://doi.org/10.3390/mi11030313
Yi Z, Huang Z, Lai S, He W, Wang L, Chi F, Zhang C, Shui L, Zhou G. Driving Waveform Design of Electrowetting Displays Based on an Exponential Function for a Stable Grayscale and a Short Driving Time. Micromachines. 2020; 11(3):313. https://doi.org/10.3390/mi11030313
Chicago/Turabian StyleYi, Zichuan, Zhenyu Huang, Shufa Lai, Wenyao He, Li Wang, Feng Chi, Chongfu Zhang, Lingling Shui, and Guofu Zhou. 2020. "Driving Waveform Design of Electrowetting Displays Based on an Exponential Function for a Stable Grayscale and a Short Driving Time" Micromachines 11, no. 3: 313. https://doi.org/10.3390/mi11030313