
Abstract
Stick–slips are spontaneous, unstable slip events during which a natural or man-made system transitions from a strong, sticking stage to a weaker, slipping stage. Stick–slips were proposed by Brace and Byerlee (Science 153:990–992, 1966) as the experimental analogue of natural earthquakes. We analyze here the mechanics of stick–slips along brittle faults by conducting laboratory experiments and by modeling the instability mechanics. We performed tens of shear tests along experimental faults made of granite and gabbro that were subjected to normal stresses up to 14.3 MPa and loading velocities of 0.26–617 µm/s. We observed hundreds of spontaneous stick–slips that displayed shear stress drops up to 0.66 MPa and slip-velocities up to 14.1 mm/s. The pre-shear and post-shear fault surface topography were mapped with atomic force microscopy at pixel sizes as low as 0.003 µm2. We attribute the sticking phase to the locking of touching asperities and the slipping phase to the brittle failure of these asperities, and found that the fault asperities are as strong as the inherent strength of the host rock. Based on the experimental observations and analysis, we derived a mechanical model that predicts the relationships between the measured stick–slip properties (stress-drop, duration, and slip-distance) and asperity strength.







Similar content being viewed by others

References
Aharonov, E., & Sparks, D. (2002). Shear profiles and localization in simulations of granular materials. Physical Review E,65(5), 051302. https://doi.org/10.1103/PhysRevE.65.051302.
Bayart, E., Svetlizky, I., & Fineberg, J. (2016). Fracture mechanics determine the lengths of interface ruptures that mediate frictional motion. Nature Physics,12, 166–170. https://doi.org/10.1038/nphys3539.
Boneh, Y., Chang, J. C., Lockner, D. A., & Reches, Z. (2014). Evolution of wear and friction along experimental faults. Pure and Applied Geophysics,171, 3125–3141. https://doi.org/10.1007/s00024-014-0801-3.
Boneh, Y., & Reches, Z. (2018). Geotriboloty—Friction, wear, and lubrication of faults. Tectonophysics,733, 171–181. https://doi.org/10.1016/j.tecto.2017.11.022.
Brace, W. F., & Byerlee, J. D. (1966). Stick–slip as a mechanism for earthquakes. Science,153, 990–992. https://doi.org/10.1126/science.153.3739.990.
Broz, M. E., Cook, R. F., & Whitney, D. L. (2006). Microhardness, toughness, and modulus of Mohs scale minerals. American Mineralogist,91(1), 135–142. https://doi.org/10.2138/am.2006.1844.
Byerlee, J. D. (1967). Frictional characteristics of granite under high confining pressure. Journal of Geophysical Research,72, 3639–3648. https://doi.org/10.1029/JZ072i014p03639.
Byerlee, J. D. (1970). The mechanics of stick-slip. Tectonophysics,9, 475–486. https://doi.org/10.1016/0040-1951(70)90059-4.
Chen, X., Madden, A. S., Bickmore, B. R., & Reches, Z. (2013). Dynamic weakening by nanoscale smoothing during high-velocity fault slip. Geology,41, 739–742. https://doi.org/10.1130/G34169.1.
Das, S., & Kostrov, B. V. (1986). Fracture of a single asperity on a finite fault: A model for weak earthquakes? Earthquake Source Mechanics,37, 91–96.
Di Toro, G., Han, R., Hirose, T., De Paola, N., Nielsen, S., Mizoguchi, K., et al. (2011). Fault lubrication during earthquakes. Nature,471, 494–498. https://doi.org/10.1038/nature09838.
Dieterich, J. H. (1978). Time-dependent friction and the mechanics of stick-slip. Pure and Applied Geophysics,116, 790–806. https://doi.org/10.1007/978-3-0348-7182-2_15.
Dieterich, J. H., & Kilgore, B. D. (1996). Imaging surface contacts: power law contact distributions and contact stresses in quartz, calcite, glass, and acrylic plastic. Tectonophysics,256, 219–239. https://doi.org/10.1016/0040-1951(95)00165-4.
Engelder, J. T., & Scholz, C. H. (1976). The role of asperity indentation and ploughing in rock friction—II: Influence of relative hardness and normal load. International Journal of Rock Mechanics and Mining Sciences and Geomechanics Abstracts,13, 155–163. https://doi.org/10.1016/0148-9062(76)90820-2.
Freund, L. B. (1990). Dynamic fracture mechanics. Cambridge: Cambridge University.
Greenwood, J. A., & Williamson, J. B. P. (1966). Contact of nominally flat surfaces. Proceedings of the Royal Society A.,295, 300–319. https://doi.org/10.1098/rspa.1966.0242.
Hirth, J. P., & Lothe, J. (1968). Theory of dislocations (p. 780). New York: McGraw-Hill.
Jaeger, J. G., & Cook, N. G. W. (1969). Fundamentals of rock mechanics. London: Methuen.
Karner, S., & Marone, C. (2000). Effects of loading rate and normal stress on stress drop and stick-slip recurrence interval. In J. Rundle, D. Turcotte, & W. Klein (Eds.), Geocomplexity and the physics of Earthquakes (Vol. 120, pp. 187–198). Oxford: AGU Geophysical Monograph Press. https://doi.org/10.1029/gm120p0187.
Katz, O., Reches, Z., & Roegiers, J. C. (2000). Evaluation of mechanical rock properties using a Schmidt Hammer. International Journal of Rock Mechanics and Mining Sciences,37(4), 723–728. https://doi.org/10.1016/S1365-1609(00)00004-6.
Keshavarz, M., Pellet, F. L., & Loret, B. (2010). Damage and changes in mechanical properties of a gabbro thermally loaded up to 1000 °C. Pure and Applied Geophysics,167, 1511–1523. https://doi.org/10.1007/s00024-010-0130-0.
Koizumi, Y., Otsuki, K., Takeuchi, A., & Nagahama, H. (2004). Frictional melting can terminate seismic slips: Experimental results of stick-slips. Geophysical Research Letters,31, L21605. https://doi.org/10.1029/2004GL020642.
Leeman, J. R., Marone, C., & Saffer, D. M. (2018). Frictional mechanics of slow earthquakes. Journal of Geophysical Research: Solid Earth,123, 7931–7949. https://doi.org/10.1029/2018JB015768.
Lockner, D. A. (1995). Rock failure. In T. J. Ahrens (Ed.) Rock physics & phase relations: a handbook of physical constants (vol. 3, pp. 127–147). https://doi.org/10.1029/rf003p0127.
Lockner, D. A., Kilgore, B. D., Beeler, N. M., & Moore, D. E. (2017). The transition from frictional sliding to shear melting in laboratory stick-slip experiments. Fault Zone Dynamic Processes: Evolution of Fault Properties During Seismic Rupture,227, 105–132.
Lyakhovsky, V., Sagy, A., Boneh, Y., & Reches, Z. (2014). Fault wear by damage evolution during steady-state slip. Pure and Applied Geophysics,171(11), 3143–3157. https://doi.org/10.1007/s00024-014-0787-x.
Majmudar, T. S., & Behringer, R. P. (2005). Contact force measurements and stress-induced anisotropy in granular materials. Nature,435, 1079. https://doi.org/10.1038/nature03805.
McLaskey, G. C., & Glaser, S. D. (2011). Micromechanics of asperity rupture during laboratory stick slip experiments. Geophysical Research Letters,38, 12.
Niemeijer, A., Di Toro, G., Nielsen, S., & Di Felice, F. (2011). Frictional melting of gabbro under extreme experimental conditions of normal stress, acceleration, and sliding velocity. Journal of Geophysical Research,116, B07404. https://doi.org/10.1029/2010JB008181.
Ohnaka, M. (1973). A physical understanding of the earthquake source mechanism. Journal of Physics of the Earth,21, 39–59. https://doi.org/10.4294/jpe1952.21.39.
Ohnaka, M., Kuwahara, Y., & Yamamoto, K. (1987). Constitutive relations between dynamic physical parameters near a tip of the propagating slip zone during stick-slip shear failure. Tectonophysics,144, 109–125. https://doi.org/10.1016/0040-1951(87)90011-4.
Passelègue, F. X., Schubnel, A., Nielsen, S., Bhat, H. S., Deldicque, D., & Madariaga, R. (2016). Dynamic rupture processes inferred from laboratory microearthquakes. Journal of Geophysical Research: Solid Earth,121(6), 4343–4365.
Power, W. L., Tullis, T. E., & Weeks, J. D. (1988). Roughness and wear during brittle faulting. Journal of Geophysical Research: Solid Earth,93, 15268–15278. https://doi.org/10.1029/JB093iB12p15268.
Rastei, M. V., Heinrich, B., & Callani, J. L. (2013). Puckering stick-slip friction induced by a sliding nanoscale contact. Physical Review Letters,111, 084301. https://doi.org/10.1103/PhysRevLett.111.084301.
Reches, Z., & Lockner, D. A. (2010). Fault weakening and earthquake instability by powder lubrication. Nature,467, 452–455. https://doi.org/10.1038/nature09348.
Rubinstein, S. M., Barel, I., Reches, Z., Braun, O. M., Urbakh, M., & Fineberg, J. (2011). Slip sequences in laboratory experiments resulting from inhomogeneous shear as analogs of earthquakes associated with a fault edge. Pure and Applied Geophysics,168, 2151–2166. https://doi.org/10.1007/s00024-010-0239-1.
Sagy, A., Brodsky, E. E., & Axen, G. J. (2007). Evolution of fault-sirface roughness with slip. Geology,35, 283–286. https://doi.org/10.1130/G23235A.1.
Savage, J. C., Byerlee, J. D., & Lockner, D. A. (1996). Is internal friction friction? Geophysical Research Letters,23(5), 487–490.
Scholz, C. H. (1992). Paradigms or small change in earthquake mechanics. International Geophysics,51, 505–517. https://doi.org/10.1016/S0074-6142(08)62836-3.
Scholz, C. H. (1998). Earthquakes and friction laws. Nature,391, 37–42. https://doi.org/10.1038/34097.
Scholz, C. H., & Engelder, J. T. (1976). The role of asperity indentation and ploughing in rock friction—I: Asperity creep and stick-slip. International Journal of Rock Mechanics and Mining Sciences and Geomechanics Abstracts,13, 149–154. https://doi.org/10.1016/0148-9062(76)90819-6.
Scuderi, M. M., Carpenter, B. M., & Marone, C. (2014). Physicochemical processes of frictional healing: Effects of water on stick-slip stress drop and friction of granular fault gouge. Journal of Geophysical Research: Solid Earth,119, 4090–4105. https://doi.org/10.1002/2013JB010641.
Svetlizky, I., & Fineberg, J. (2014). Classical shear cracks drive the onset of dry frictional motion. Nature,509, 205–208. https://doi.org/10.1038/nature13202.
Tabor, D. (1975). Interaction between surfaces: Adhesion and friction. In J. M. Blakely (Ed.), Surface physics of materials, Ch. 10. New York: Academic Press.
Tabor, D. (1981). Friction—The present state of our understanding. Journal of Lubrication Technology,103, 169–179. https://doi.org/10.1115/1.3251622.
Tabor, D. (2006). Friction, lubrication, and wear. In H. A. Rothbart & T. H. Brown (Eds.), Mechanical design handbook (2nd ed., pp. 71–725). New York: Measurement, Analysis and Control of Dynamic Systems.
Tesei, T., Carpenter, B. M., Giorgetti, C., Scuderi, M. M., Sagy, A., Scarlato, P., et al. (2017). Friction and scale-dependent deformation processes of large experimental carbonate faults. Journal of Structural Geology,100, 12–23. https://doi.org/10.1016/j.jsg.2017.05.008.
Wawersik, W. R., & Brace, W. F. (1971). Post-failure behavior of a granite and diabase. Rock Mechanics,3, 61–85. https://doi.org/10.1007/BF01239627.
Whitehouse, D. J., & Archard, J. F. (1970). The properties of random surfaces of significance in their contact. Proceedings of the Royal Society A,316, 97–121. https://doi.org/10.1098/rspa.1970.0068.
Yamashita, F., Fukuyama, E., Xu, S., Mizoguchi, K., Kawakata, H., & Takizawa, S. (2018). Rupture preparation process controlled by surface roughness on meter-scale laboratory fault. Tectonophysics,733, 193–208. https://doi.org/10.1016/j.tecto.2018.01.034.
Acknowledgements
Many thanks for the discussions with Einat Aharonov and Jay Fineberg. The insightful comments of two anonymous reviewers led to significant improvements of the presentation. The research was funded by NSF grant EAR-1620330 “Investigating earthquake source processes in the laboratory” and NSF grant EAR-1345087 “Experimental simulation of earthquake rupture processes”. Additional data including programs and materials will become available upon request for reproducing or extending the analysis. The authors declare no conflict of interests.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix
Appendix
1.1 Experimental Set-Up
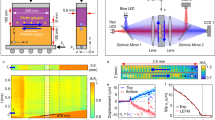
The high-velocity, rotary shear apparatus (ROGA) (Reches and Lockner 2010) was modified to include an integrated low-velocity capability driven by a stepper motor for slip-velocities of 0.25 µm/s to 1 mm/s (item 4 in Fig. 8a). The experimental fault has a ring-shaped contact between a lower solid rock blocks (10.2 cm diameter and 5 cm height) and an upper block with raised ring (Fig. 8b). The gabbro fault has inner diameter of 62 mm and outer diameter of ~ 84 mm, while the SWG fault has inner diameter of 61.4 mm and outer diameter of 84.5 mm. Bare rock surfaces with #600 grit roughening were used for the present tests. Rotation is applied to the lower block by the stepper motor and the upper block is stationary; the velocity and displacement were controlled by this stepper motor. The mechanical data were monitored at rates of 3000–5000 samples/s, and included the normal and shear stresses by load cells, and the displacement between the two fault blocks by an eddy current sensor (Fig. 8b, c). Acoustic emissions were monitored by 3D accelerometers at rate of 1 MHz for periods up to 4 s for part of the run durations. The experimental data were continuously recorded with a dedicated Labview program at sampling rate of 3–5 kHz.

The ROGA apparatus (Reches and Lockner 2010). a The apparatus with marked load cell (1), sample loading site (2), electric–magnetic clutch (3), step motor arm for low velocity tests (4), and high-frequency strain-gauge sampling hardware for rupture propagation monitoring (5). b The fault rock samples of SWG with schematic presentation of the measuring slip, Dm, between top and bottom of the fault blocks. c Photo of a bi-material fault with a horizontal eddy-current sensor (e) and location of Dm
1.2 Experimental Procedure
The typical procedure for the shear experiments includes the following steps. First, load the sample, attach the displacement sensor. Second, set and apply the desired normal stress on the fault. Third, use the stepper motor system to load the fault at the desired velocity and duration. Typical driving speed is 1–10 µm/s, and typical loading duration is 10–20 s. The normal stress was kept constant during shear and can be adjusted in between experiments. Experiments ran at lower normal stresses, σn < 10.5 MPa, slide stably without any stick–slips for both SWG and RNG faults; these experiments are not reported here. At higher normal stresses, stick–slips start to occur. The experimental conditions and results summery are listed in Table 3.
1.3 AFM Mapping of Fault Surfaces
We used AFM (atomic force microscope) from Asylum Research to map topography of both the pre-shear rock surface and the post-shear fault surface. The topologic images were acquired under the AC mode (tapping) in ambient room conditions, with typical scan area of a few microns up to 60 µm across with resolution up to 1024 by 1024 pixels. We mapped 6 polished pre-shear surfaces and 13 post-shear surfaces from SWG, 4 post-shear surfaces from gabbro, and 4 pre-shear surfaces from a diorite as an approximate to gabbro (no available pre-shear gabbro surface for AFM). Typical maps are displayed in Fig. 4. The two-dimensional height distribution and surface inclination distribution (Fig. 4e, f) are extracted from the AFM topographic map using the Gwyddion software available online (http://gwyddion.net).
We measure the distances between the peaks of the highest asperities in three of the AFM maps of SWG. The peaks of the highest asperities were first digitized (white points in Fig. 9) and then the distances were calculated. In the pre-shear maps (Fig. 9a, b) the distances were calculated between all marked highest asperities (note scales of maps). In the post-slip map (Fig. 9c), which displays clear slip striations, the asperity distances were calculated between neighboring marked high asperities; we assume that the lock-and-fail mechanism operates only parallel to the slip direction. Note that the used images display the upper 50% of the surface elevation and the lower 50% is colored black.

Surface topography of SWG fault surfaces as mapped by AFM. The images display the upper 50% of the surface elevation and the lower 50% is colored black. The digitized peaks of the high asperities are marked by small white squares. a, b Pre-slip AFM images; note scales. c Post-slip AFM image. A total of 705 distances were calculated in a–c (see text)
Rights and permissions
About this article

Cite this article
Chen, X., Carpenter, B.M. & Reches, Z. Asperity Failure Control of Stick–Slip Along Brittle Faults. Pure Appl. Geophys. 177, 3225–3242 (2020). https://doi.org/10.1007/s00024-020-02434-y
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00024-020-02434-y