
Abstract
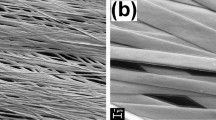
Recently, researches on artificial muscles for imitating the functions of the natural muscles has attracted wide attention. The fiber-shape actuators, shape-memory materials or deforming devices, which are similar to human muscle fiber bundles, have extensively studied and provided more possibilities for artificial muscles. Herein, we develop a thermal responsible fiber-shaped actuator based on the low-cost hollow polyethylene fiber. The sheath-core structured fibrous actuators and the stainless-steel conductive yarn winded pre-stretched polyethylene actuators are fabricated with the heating assisted pre-stretching procedure. The actuation mechanism of the thermal-responsive orientation change of molecular chains driving the actuation is discussed and demonstrated by 2D XRD patterns. These polyethylene-based fibrous actuators displayed three significant advantages including (i) color-turning and shape-changing bifunctional response, (ii) direct joule heating actuation and (iii) effective contraction (18% shrinkage of the pristine length) and lifting ability (the ratio of lifting weight to self-weight is up to 50).
Graphic Abstract







Similar content being viewed by others

References
Mirvakili SM, Hunter IW. Artificial muscles: mechanisms, applications, and challenges. Adv Mater. 2018;30:1704407.
Qiu Y, Zhang E, Plamthottam R, Pei Q. Dielectric elastomer artificial muscle: materials innovations and device explorations. Acc Chem Res. 2019;52:316.
Mu J, Jung de Andrade M, Fang S, Wang X, Gao E, Li N, Kim SH, Wang H, Hou C, Zhang Q, Zhu M, Qian D, Lu H, Kongahage D, Talebian S, Foroughi J, Spinks G, Kim H, Ware TH, Sim HJ, Lee DY, Jang Y, Kim SJ, Baughman RH. Sheath-run artificial muscles. Science. 2019;365:150.
Kanik M, Orguc S, Varnavides G, Kim J, Benavides T, Gonzalez D, Akintilo T, Tasan CC, Chandrakasan AP, Fink Y, Anikeeva P. Strain-programmable fiber-based artificial muscle. Science. 2019;365:145.
Haines CS, Li N, Spinks GM, Aliev AE, Di J, Baughman RH. New twist on artificial muscles. Proc Natl Acad Sci USA. 2016;113:11709.
Liu ZF, Fang S, Moura FA, Ding JN, Jiang N, Di J, Zhang M, Lepro X, Galvao DS, Haines CS, Yuan NY, Yin SG, Lee DW, Wang R, Wang HY, Lv W, Dong C, Zhang RC, Chen MJ, Yin Q, Chong YT, Zhang R, Wang X, Lima MD, Ovalle-Robles R, Qian D, Lu H, Baughman RH, STRETCHY ELECTRONICS. Hierarchically buckled sheath-core fibers for superelastic electronics, sensors, and muscles. Science. 2015;349:400.
Chen P, Xu Y, He S, Sun X, Pan S, Deng J, Chen D, Peng H. Hierarchically arranged helical fibre actuators driven by solvents and vapours. Nat Nanotechnol. 2015;10:1077.
Chen J, Leung FK, Stuart MCA, Kajitani T, Fukushima T, van der Giessen E, Feringa BL. Artificial muscle-like function from hierarchical supramolecular assembly of photoresponsive molecular motors. Nat Chem. 2018;10:132.
Fang B, Xiao Y, Xu Z, Chang D, Wang B, Gao W, Gao C. Handedness-controlled and solvent-driven actuators with twisted fibers. Mater Horiz. 2019. https://doi.org/10.1039/c8mh01647j.
Jia T, Wang Y, Dou Y, Li Y, Jung de Andrade M, Wang R, Fang S, Li J, Yu Z, Qiao R, Liu Z, Cheng Y, Su Y, Minary-Jolandan M, Baughman RH, Qian D, Liu Z. Moisture sensitive smart yarns and textiles from self-balanced silk fiber muscles. Adv Funct Mater. 2019;29:1808241.
Kim H, Moon JH, Mun TJ, Park TG, Spinks GM, Wallace GG, Kim SJ. Thermally responsive torsional and tensile fiber actuator based on graphene oxide. ACS Appl Mater Interfaces. 2018;10:32760.
Yahara S, Wakimoto S, Kanda T, Matsushita K. McKibben artificial muscle realizing variable contraction characteristics using helical shape-memory polymer fibers. Sens Actuators A. 2019;295:637.
Yu Q, Yang X, Chen Y, Yu K, Gao J, Liu Z, Cheng P, Zhang Z, Aguila B, Ma S. Fabrication of light-triggered soft artificial muscles via a mixed-matrix membrane strategy. Angew Chem Int Ed Engl. 2018;57:10192.
Roach DJ, Yuan C, Kuang X, Li VC, Blake P, Romero ML, Hammel I, Yu K, Qi HJ. Long liquid crystal elastomer fibers with large reversible actuation strains for smart textiles and artificial muscles. ACS Appl Mater Interfaces. 2019;11:19514.
Shi Q, Sun J, Hou C, Li Y, Zhang Q, Wang H. Advanced functional fiber and smart textile. Adv Fiber Mater. 2019;1:3.
Shi Q, Li J, Hou C, Shao Y, Zhang Q, Li Y, Wang H. A remote controllable fiber-type near-infrared light-responsive actuator. Chem Commun. 2017;53:11118.
Sun Y, Wang Y, Hua C, Ge Y, Hou S, Shang Y, Cao A. Water-responsive helical graphene-oxide fibers incorporating a continuous carbon nanotube network. Carbon. 2018;132:394.
Cheng H, Liu J, Zhao Y, Hu C, Zhang Z, Chen N, Jiang L, Qu L. Graphene fibers with predetermined deformation as moisture-triggered actuators and robots. Angew Chem Int Ed. 2013;52:10482.
Meng J, Hou C, Zhang Q, Li Y, Wang H. Light-driven artificial muscles based on electrospun microfiber yarns. Sci China Technol Sci. 2019;62:965.
Haines CS, Lima MD, Li N, Spinks GM, Foroughi J, Madden JD, Kim SH, Fang S, Jung de Andrade M, Goktepe F, Goktepe O, Mirvakili SM, Naficy S, Lepro X, Oh J, Kozlov ME, Kim SJ, Xu X, Swedlove BJ, Wallace GG, Baughman RH. Artificial muscles from fishing line and sewing thread. Science. 2014;343:868.
Kim K, Cho KH, Jung HS, Yang SY, Kim Y, Park JH, Jang H, Nam J-D, Koo JC, Moon H, Suk JW, Rodrigue H, Choi HR. Double helix twisted and coiled soft actuator from spandex and nylon. Adv Eng Mater. 2018;20:1800536.
Huang Y-W, Lee W-S, Yang F, Lee S. Tensile deformation of artificial muscles: annealed nylon 6 lines. Polymer. 2019;177:49.
Maksimkin AV, Kaloshkin SD, Zadorozhnyy MV, Senatov FS, Salimon AI, Dayyoub T. Artificial muscles based on coiled UHMWPE fibers with shape memory effect. Express Polym Lett. 2018;12:1072.
Foroughi J, Spinks GM, Wallace GG, Oh J, Kozlov ME, Fang SL, Mirfakhrai T, Madden JDW, Shin MK, Kim SJ, Baughman RH. Torsional carbon nanotube artificial muscles. Science. 2011;334:494.
Li K, Shao Y, Yan H, Lu Z, Griffith KJ, Yan J, Wang G, Fan H, Lu J, Huang W. Lattice-contraction triggered synchronous electrochromic actuator. Nat Commun. 2018;9:4798.
Mu J, Wang G, Yan H, Li H, Wang X, Gao E, Hou C, Pham ATC, Wu L, Zhang Q, Li Y, Xu Z, Guo Y, Reichmanis E, Wang H, Zhu M. Molecular-channel driven actuator with considerations for multiple configurations and color switching. Nat Commun. 2018;9:590.
Behl M, Kratz K, Noechel U, Sauter T, Lendlein A. Temperature-memory polymer actuators. Proc Natl Acad Sci USA. 2013;110:12555.
Acknowledgements
We gratefully acknowledge the financial support by the Manned Spaceflight Advanced Research Funds (17620504) and the Fundamental Research Funds for the Central Universities (16D310606, 17D310606, 106-06-0019058).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare no competing financial interests.
Electronic supplementary material
Below is the link to the electronic supplementary material.
Rights and permissions
About this article

Cite this article
Gao, P., Li, J. & Shi, Q. A Hollow Polyethylene Fiber-Based Artificial Muscle. Adv. Fiber Mater. 1, 214–221 (2019). https://doi.org/10.1007/s42765-019-00019-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s42765-019-00019-6