Applied Materials Today ( IF 8.3 ) Pub Date : 2019-12-31 , DOI: 10.1016/j.apmt.2019.100537 Tanmoy Mukhopadhyay , Jiayao Ma , Huijuan Feng , Degao Hou , Joseph M. Gattas , Yan Chen , Zhong You
|
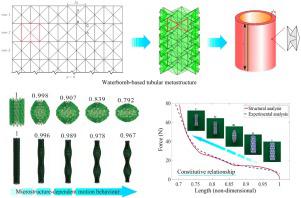
This paper develops an origami based mechanical metamaterial with programmable deformation-dependent stiffness and shape modulation, leading to the realization of a distant actuation feature. Through computational and experimental analyses, we have uncovered that a waterbomb based tubular metamaterial can undergo mixed mode of deformations involving both rigid origami motion and structural deformation. Besides the capability of achieving a near-zero stiffness, a contact phase is identified that initiates a substantial increase in the stiffness with programmable features during deformation of the metamaterial. Initiation of the contact phase as a function of the applied global load can be designed based on the microstructural geometry of the waterbomb bases and their assembly. The tubular metamaterial can exhibit a unique deformation dependent spatially varying mixed mode Poisson’s ratio, which is achievable from a uniform initial configuration of the metamaterial. The spatial profile of the metamaterial can be modulated as a function of the applied far-field global force, and the configuration and assembly of the waterbomb bases. This creates a new possibility of developing a distant actuation feature in the metamaterial enabling us to achieve controlled local actuation through the application of a single far-field force. The distant actuation feature eliminates the need of installing embedded complex network of sensors, actuators and controllers in the material. The fundamental programmable features of the origami metamaterial unravelled in this paper can find wide range of applications in soft robotics, aerospace, biomedical devices and various other advanced physical systems.
中文翻译:
折纸材料中的可编程刚度和形状调制:远距离驱动功能的出现
本文开发了一种基于折纸的机械超材料,具有可编程的变形相关的刚度和形状调制,从而实现了远距离驱动特性。通过计算和实验分析,我们发现基于水炸弹的管状超材料可能会经历混合变形模式,包括刚性折纸运动和结构变形。除了获得接近于零的刚度的能力之外,还确定了一种接触相,该相在超材料变形期间通过可编程特征启动了刚度的大幅增加。可以根据水炸弹底座的微结构几何形状和它们的组装来设计接触阶段根据所施加的总载荷的函数。管状超材料可以表现出独特的变形相关的空间变化的混合模式泊松比,这可以通过超材料的均匀初始构造来实现。可以根据所施加的远场全局力以及水炸弹底座的配置和组装来调节超材料的空间轮廓。这创造了在超材料中开发远距离致动特征的新可能性,使我们能够通过施加单个远场力来实现受控的局部致动。远距离的驱动功能消除了在物料中安装传感器,执行器和控制器的嵌入式复杂网络的需求。本文未阐明的折纸超材料的基本可编程功能可以在软机器人,航空航天,


























 京公网安备 11010802027423号
京公网安备 11010802027423号