当前位置:
X-MOL 学术
›
Adv. Eng. Mater.
›
论文详情
Our official English website, www.x-mol.net, welcomes your feedback! (Note: you will need to create a separate account there.)
Cephalopod‐Inspired Swimming Robot Using Dielectric Elastomer Synthetic Jet Actuator
Advanced Engineering Materials ( IF 3.6 ) Pub Date : 2019-12-20 , DOI: 10.1002/adem.201901130 Chao Tang 1 , Wentao Ma 2 , Bo Li 2 , Mingliang Jin 1, 3 , Hualing Chen 2
Advanced Engineering Materials ( IF 3.6 ) Pub Date : 2019-12-20 , DOI: 10.1002/adem.201901130 Chao Tang 1 , Wentao Ma 2 , Bo Li 2 , Mingliang Jin 1, 3 , Hualing Chen 2
Affiliation
|
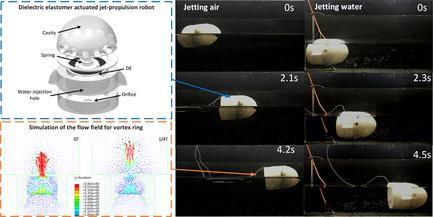
Jet propulsion is the main method of locomotion developed by cephalopods to swim through water, either for hunting or escaping from predators. Under this inspiration, diverse underwater robots utilizing jet propulsion‐based locomotion are studied. This article presents a cephalopod‐inspired robot based on a dielectric elastomer actuator, utilizing jet‐propulsion actuation. The actuator is designed and optimized under the guidance of a corresponding electromechanical model. Then, the flow field characteristics of the synthetic jet actuator are simulated and analyzed. Equipped with the actuator, the bioinspired robot can locomote either with a speed of 0.66 body length per second on the surface of the water by jetting air or with a speed of 0.43 body length per second while almost completely submerged underwater by jetting water. The jet actuator presents even more environmental adaptability, which powers dual swimming locomotion by jetting two flow media, and can potentially be applied to the design of underwater robots.
中文翻译:

使用介电弹性体合成射流执行器的头足类游泳机器人
喷气推进是头足类动物为了在水里狩猎或逃避食肉动物而在水中游动的主要运动方法。在这种启发下,研究了各种利用基于喷气推进的运动的水下机器人。本文介绍了一种基于头足类机器人的机器人,该机器人基于介电弹性体致动器,利用喷射推进致动。在相应的机电模型的指导下对执行器进行设计和优化。然后,对合成射流致动器的流场特性进行了仿真和分析。配备了执行器的受生物启发的机器人可以通过喷射空气以每秒0.66体长的速度在水面上移动,或者以每秒0.43体长的速度在水上移动,同时几乎完全被淹没在水下。
更新日期:2019-12-20
中文翻译:
使用介电弹性体合成射流执行器的头足类游泳机器人
喷气推进是头足类动物为了在水里狩猎或逃避食肉动物而在水中游动的主要运动方法。在这种启发下,研究了各种利用基于喷气推进的运动的水下机器人。本文介绍了一种基于头足类机器人的机器人,该机器人基于介电弹性体致动器,利用喷射推进致动。在相应的机电模型的指导下对执行器进行设计和优化。然后,对合成射流致动器的流场特性进行了仿真和分析。配备了执行器的受生物启发的机器人可以通过喷射空气以每秒0.66体长的速度在水面上移动,或者以每秒0.43体长的速度在水上移动,同时几乎完全被淹没在水下。


























 京公网安备 11010802027423号
京公网安备 11010802027423号